首页
专利
搜索
投稿
订阅
RSS订阅
收藏技术秀秀
专利应用
App客户端
专利分类:
展开全部
农业林业
食品饮料
烟草加工
服装饰品
医药医疗
家居日用
休闲运动
木材加工
纺织皮革
建筑材料
家具门窗
水利排水
道路铁路
五金工具
安全消防
造纸纸品
印刷排版
办公文教
工艺制品
摄影电影
乐器声学
照明工业
机械加工
金属材料
无机化学
有机化学
有机化合
喷涂装置
车辆装置
铁路车辆
非机动车
船舶设备
航空航天
包装储藏
塑料加工
蒸汽制造
燃烧设备
供热炉灶
制冷冷却
环保节能
物理化学
分离筛选
石油煤气
发动机及
微观装置
电解电泳
土层岩石
非变容式
流体压力
工程元件
气体液体
测量装置
测时钟表
控制调节
计算推算
核算装置
信号装置
信息存储
电气元件
发电变电
电子电路
电子通信
其他产品
一种残膜回收机防缠绕挑膜装置的制作
一种秧草收获机用电力驱动行走机构的
灵巧
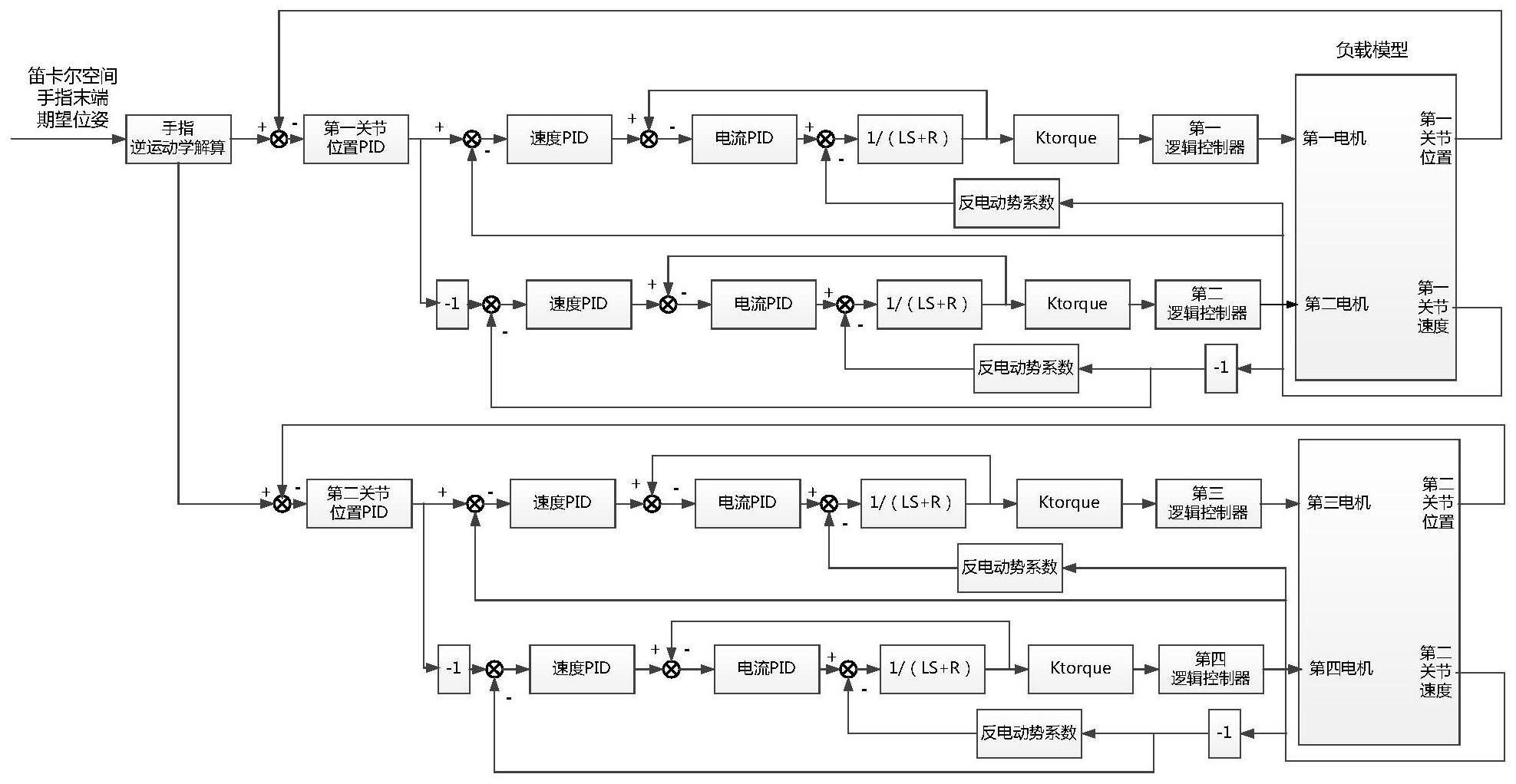
一种旋转耦合双关节推挽式柔性绳索驱动方法与流程
本发明涉及一种旋转耦合双关节推挽式柔性绳索驱动方法,用于实现耦合绳驱动双关节高精度力/位混合控制运动,属于智能控制领域,适用于绳驱灵巧手手指运动控制,或者其他绳驱智能机构的运动控制。
标签:
双关
适用于
柔性
绳索
灵巧
2023-09-09
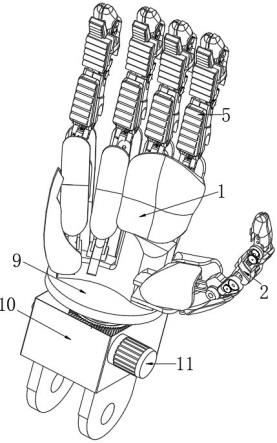
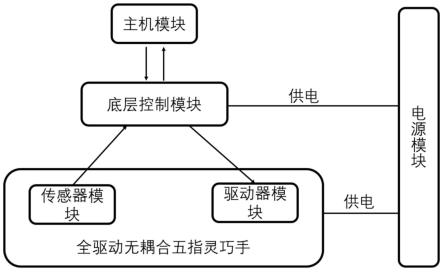
一种全驱动式灵巧机械手
本发明涉及机械手技术领域,尤其涉及一种全驱动式灵巧机械手。
标签:
机械手
灵巧
2023-03-20
一种用于仿人灵巧手指关节的全数字化柔性位置传感系统的制作方法
本发明涉及一种用于仿人灵巧手指关节的柔性位置传感系统。
标签:
柔性
灵巧
关节
手指
位置
2023-02-04
一种灵巧手的控制系统及控制方法与流程
本发明涉及机器人技术领域,更具体地说是一种灵巧手的控制系统及控制方法。
标签:
灵巧
控制系统
机器人
方法
2023-02-04
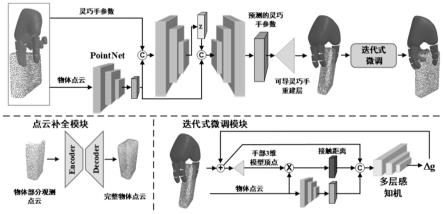
基于深度生成的仿人灵巧手物体抓取方法及机器人系统
本发明属于机器人抓取领域,具体涉及了一种基于深度生成的仿人灵巧手物体抓取方法及机器人系统。
标签:
机器人
灵巧
物体
深度
方法
2022-12-23
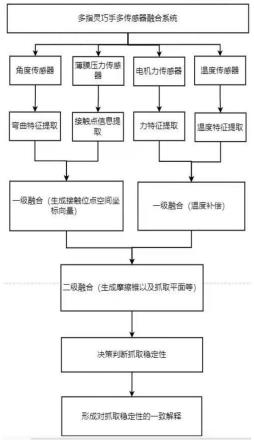
一种多感知融合灵巧手的协调控制方法
本发明涉及灵巧手控制设计领域。设计了一种多感知融合灵巧手的协调控制方法。
标签:
灵巧
方法
2022-12-10
一种灵巧波形高功率微波产生系统
本发明涉及高功率微波技术领域,特别是涉及一种灵巧波形高功率微波产生系统。
标签:
微波
功率
特别是
波形
灵巧
2022-12-06
无人机用组合分离灵巧集联结构
本发明涉及无人机刚性集联结构领域,尤其涉及一种无人机用组合分离灵巧集联结构。
标签:
无人机
组合
刚性
灵巧
2022-11-19
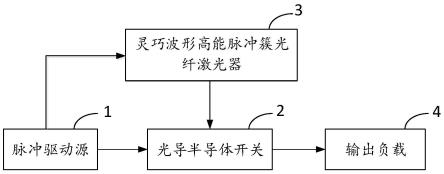
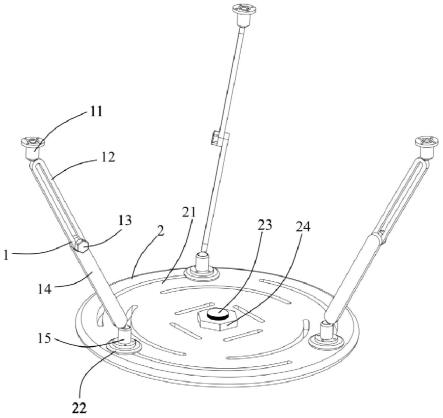
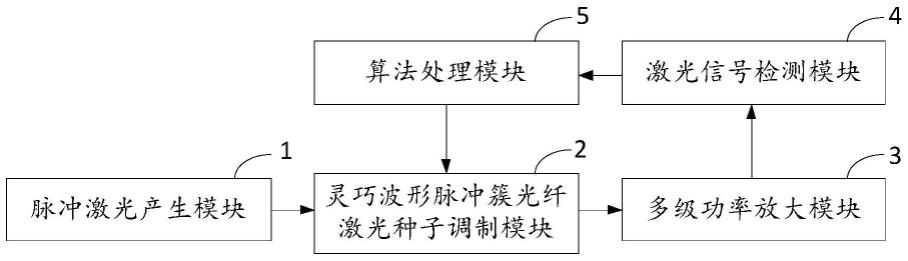
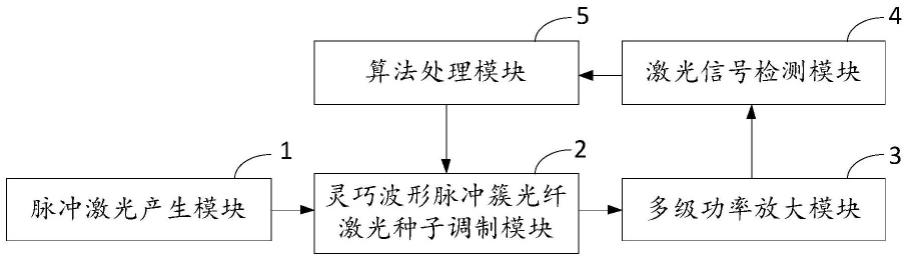
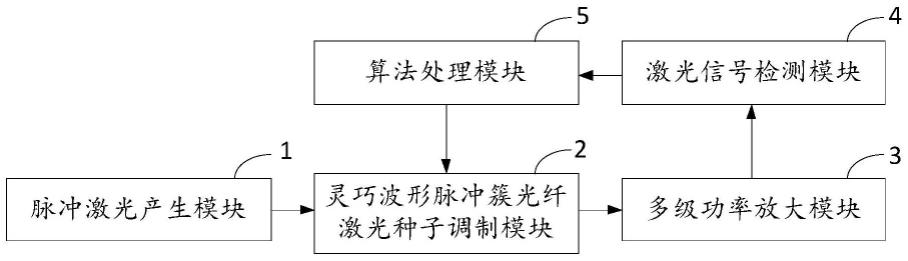
一种用于产生灵巧波形高功率微波的光纤激光器
本发明涉及微波和激光器技术领域,特别是涉及一种用于产生灵巧波形高功率微波的光纤激光器。
标签:
激光器
微波
特别是
波形
灵巧
2022-11-14
一种用于产生灵巧波形高功率微波的光纤激光器
本发明涉及微波和激光器技术领域,特别是涉及一种用于产生灵巧波形高功率微波的光纤激光器。
标签:
激光器
微波
特别是
波形
灵巧
2022-11-13
一种用于产生灵巧波形高功率微波的光纤激光器
本发明涉及微波和激光器技术领域,特别是涉及一种用于产生灵巧波形高功率微波的光纤激光器。
标签:
激光器
微波
特别是
波形
灵巧
2022-11-13
一种用于产生灵巧波形高功率微波的光纤激光器
本发明涉及微波和激光器技术领域,特别是涉及一种用于产生灵巧波形高功率微波的光纤激光器。
标签:
激光器
微波
特别是
波形
灵巧
2022-11-12
一种用于产生灵巧波形高功率微波的光纤激光器
本发明涉及微波和激光器技术领域,特别是涉及一种用于产生灵巧波形高功率微波的光纤激光器。
标签:
激光器
微波
特别是
波形
灵巧
2022-11-12
采用连续柔性体驱动的手部灵巧康复机器人
本发明涉及机器人与医疗康复技术领域,尤其是涉及一种采用连续柔性体驱动的手部灵巧康复机器人。
标签:
柔性
灵巧
人与
机器人
手部
2022-11-09
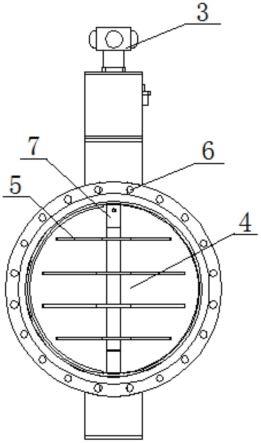
一种灵巧型角行程阀门的制作方法
本实用新型涉及角行程阀门技术领域,具体来说,涉及一种灵巧型角行程阀门。
标签:
阀门
行程
灵巧
2022-09-07
一种五向灵巧探索机器人及其行进方法
本发明属于工业器械技术领域,具体涉及一种五向灵巧探索机器人及其行进方法。
标签:
灵巧
机器人
器械
方法
工业
2022-09-01
一种面向精细抓取的灵巧手自适应导纳控制系统及方法
本发明属于机器人灵巧手的控制领域,涉及一种面向精细抓取的灵巧手自适应导纳控制系统及方法。
标签:
灵巧
导纳
控制系统
机器人
自适应
2022-07-30
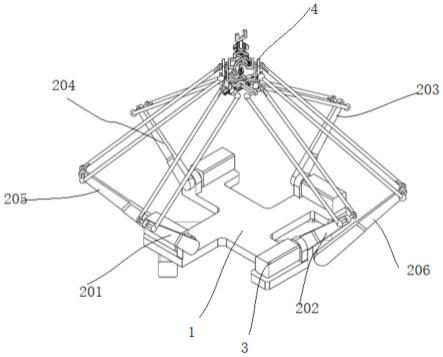
一种具有灵巧操作能力的六自由度并联机器人
本发明属于机器人设计领域,特别是涉及一种具有灵巧操作能力的六自由度并联机器人。
标签:
机器人
特别是
自由度
灵巧
能力
2022-07-23
一种机械臂与灵巧手的融合系统及运动控制方法与流程
本发明属于机器人运动控制领域,涉及一种四自由度机械臂与灵巧手的融合系统及运动控制方法。
标签:
自由度
灵巧
机器人
方法
机械
2022-07-10
一种灵巧型自动调焦激光等离子多通道圆管切割装置的制作方法
本发明涉及激光等离子切割装置技术领域,具体为一种灵巧型自动调焦激光等离子多通道圆管切割装置。
标签:
等离子
激光
装置
圆管
灵巧
2022-06-29
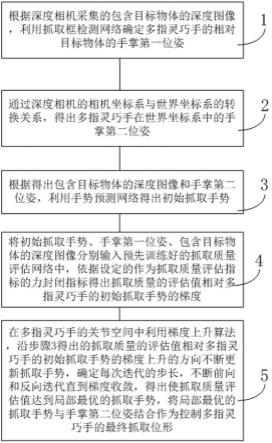
基于深度神经网络的多指灵巧手抓取手势规划方法
本发明涉及利用计算机视觉的机器人控制领域,尤其涉及一种基于深度神经网络的多指灵巧手抓取手势规划方法。
标签:
神经网络
灵巧
手势
机器人
深度
2022-06-22
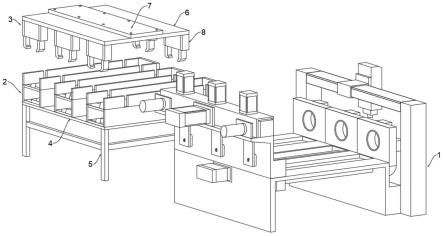
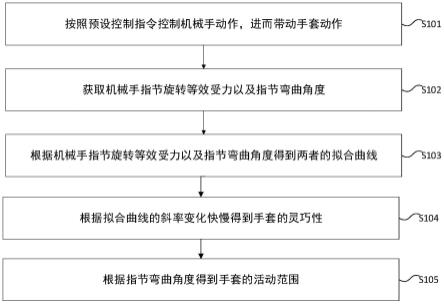
一种冰球手套灵巧性及活动范围测试方法及测试系统
本发明涉及体育用品领域,特别是指一种冰球手套灵巧性及活动范围测试方法及测试系统。
标签:
测试
冰球
灵巧
体育用品
手套
2022-06-08
一种移动式灵巧作业机械臂的制作方法
本发明涉及一种机械臂,特别涉及一种移动式灵巧作业机械臂。
标签:
机械
作业
灵巧
移动式
2022-06-05
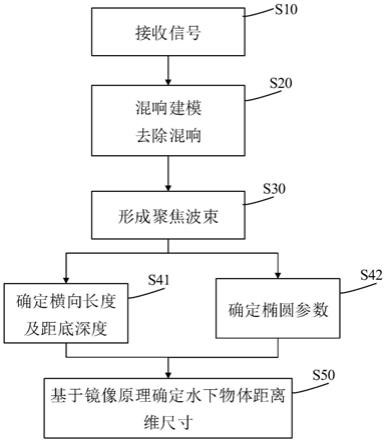
一种灵巧型三维水下物体尺度估计方法与流程
本发明属于水声探测技术领域,涉及一种灵巧型三维水下物体尺度估计方法。
标签:
灵巧
水下
尺度
物体
水声
2022-05-21
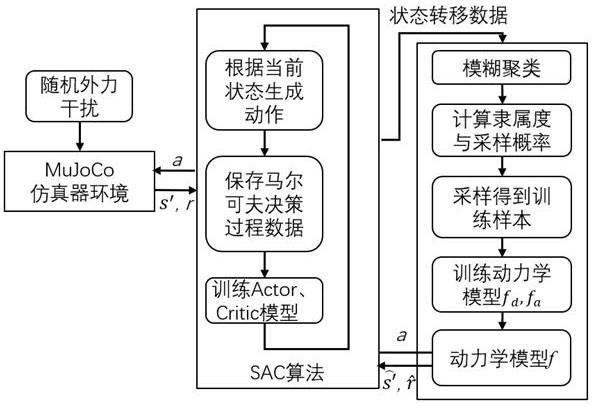
基于深度神经网络的灵巧手抓持过程动力学模型搭建及训练方法
本发明属于灵巧手强化学习控制领域,尤其涉及一种基于深度神经网络的灵巧手抓持过程动力学模型搭建及训练方法。
标签:
灵巧
神经网络
动力学
深度
模型
2022-04-30
36
1
2
下一页
尾页
最热文献