1.本发明涉及机器人与医疗康复技术领域,尤其是涉及一种采用连续柔性体驱动的手部灵巧康复机器人。
背景技术:
2.手是人体上肢最重要的关节之一,具有灵活度高,功能性强的特点,日常生活中的各种活动都离不开手部的精细操作。临床上有许多因脊髓损伤、脑卒中等疾病而导致手部功能部分丧失、手指活动范围受限、手指肌力不足的患者,但研究表明,对髓损伤、脑卒中等而导致手功能受损患者进行积极的手功能恢复训练,可以加速手部功能的恢复。传统手部康复训练主要采用医师手把手辅助治疗,一名治疗师只能同时对一名患者进行训练,工作量大、训练效率低、无法保证患者得到足够的训练强度,而且治疗效果也多取决于治疗师的经验和水平。
3.随着科技的不断进步,利用机器人技术进行康复训练成为了手部康复治疗的重要手段之一。手部康复机器人不仅可以减小治疗师的工作量,缓解康复医疗资源的压力,还可以实现康复数据的精确记录,帮助治疗师对康复效果进行客观评价,保证康复方案的及时调整与个体化制定。
4.现有的手部康复机器人大多为刚性外骨骼,使用刚性连杆或其他复杂的刚性传动机构实现手指的康复运动,主要存在以下问题:1、手指灵活度很高,需要实现多自由度精准复杂运动,使得刚性传动机构的结构设计十分复杂,成本高,生产效率低;2、刚性外骨骼整体体积大,重量重,便携性差,给病人的手部造成很大的承重负担;3、刚性杆件及其他刚性传动机构的应用附加惯量和质量较大,极大地改变了手部的动力学特性;4、刚性构件容易对手指关节造成刚性冲击,产生二次伤害,对控制系统的精确性,实时性,安全性要求很高。
技术实现要素:
5.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种采用连续柔性体驱动的手部灵巧康复机器人,结构简单、成本低、生产效率高,体积小、重量轻、便携性好,不会给病人手部造成很大承重负担,附加惯量小,不会对手指造成刚性冲击,安全性好。
6.根据本发明实施例的采用连续柔性体驱动的手部灵巧康复机器人,包括:
7.防护手套,所述防护手套包括五个指套部;
8.驱动装置,所述驱动装置包括指部组件、连续柔性体和驱动组件,其中,所述指部组件设置在五个所述指套部中的一个所述指套部的背部上、大拇指对应的所述指套部的外侧上、食指对应的所述指套部的外侧上或腕掌关节对应的所述防护手套的背部处,所述连续柔性体的一端与所述指部组件的一端相连且另一端与所述驱动组件相连;所述驱动组件控制所述连续柔性体的收放,通过所述指部组件将所述连续柔性体传递的力转换成弯矩;
9.当所述指部组件设置在五个所述指套部中的一个所述指套部的背部上时,所述弯
矩控制对应的手指做伸展/屈曲运动;
10.当所述指部组件设置在大拇指对应的所述指套部的外侧上或食指对应的所述指套部的外侧上时,所述弯矩相应地控制大拇指或食指做外展/内收运动;
11.当所述指部组件设置在腕掌关节对应的所述防护手套的背部处时,所述弯矩控制大拇指做对掌运动。
12.根据本发明实施例的采用连续柔性体驱动的手部灵巧康复机器人,一方面,本发明通过利用连续柔性体代替现有技术中手指关节上的复杂传动机构,直接驱动手指运动,具有如下优点,第一,结构更加简单,不存在复杂刚性结构,因此本发明的手部灵巧康复机器人成本更低,控制更为方便;第二,不会对手指造成刚性冲击,安全性好;第三、可以极大地减小本发明的手部灵巧康复机器人的质量和体积,实现了康复设备的轻量化,具有很好的便携性,减少了使用者的承重负担。另一方面,本发明的手部灵巧康复机器人具有模块化特征,可以根据手指康复运动需求进行不同组合,以满足多样化的手指康复运动需求。
13.在一些实施例中,所述连续柔性体为钢索、薄钢条或纤维条,所述驱动组件为电动推杆组件、电机滚筒组件和蜗杆齿条组件;其中,
14.当所述连续柔性体为所述钢索时,所述驱动组件为所述电动推杆组件或所述蜗杆齿条组件且固定在所述防护手套上或不固定在所述防护手套上,或所述驱动组件为所述电机滚筒组件且不固定在所述防护手套上;
15.当所述连续柔性体为所述薄钢条或所述纤维条时,所述驱动组件为所述电动推杆组件或所述蜗杆齿条组件且固定在所述防护手套上。
16.在一些实施例中,当所述连续柔性体为所述钢索且不固定在所述防护手套上时,所述钢索上设有导向组件,所述导向组件位于所述驱动组件和所述指部组件之间,用于对所述连续柔性体的运动方向进行引导。
17.在一些实施例中,所述引导组件包括第一引导口、软管和第二引导口,所述第一引导口和所述第二引导口分别固定在所述软管的两端,所述第一引导口固定在所述防护手套上且靠近所述指部组件,所述第二引导口不固定在所述防护手套上且远离所述指部组件,所述连续柔性体可移动地穿过所述第一引导口、所述软管和所述第二引导口。
18.在一些实施例中,所述指部组件包括支撑板;所述支撑板能弯曲但不能拉伸;
19.当所述指部组件设置在五个所述指套部中的一个所述指套部的背部上时,所述支撑板的一端与对应的所述指套部的指尖处固定,所述支撑板的另一端与对应的所述指套部的基部处固定,所述连续柔性体的一端固定在所述支撑板的一端处;
20.当所述指部组件设置在大拇指对应的所述指套部的外侧上或食指对应的所述指套部的外侧上时,所述支撑板的一端相应地与大拇指或食指的近侧指间关节与远侧指间关节之间的位置对应的所述指套部固定,所述支撑板的另一端相应地与大拇指或食指对应的所述指套部的基部处固定,所述连续柔性体的一端固定在所述支撑板的一端处;
21.当所述指部组件设置在腕掌关节对应的所述防护手套的背部处时,所述支撑板的一端与大拇指掌腕关节对应的所述防护手套的背部处固定,所述支撑板的另一端与食指掌腕关节对应的所述防护手套的背部处固定,所述连续柔性体的一端固定在所述支撑板的一端处。
22.在一些实施例中,所述支撑板为波浪形塑料板、波浪形纤维板或链条板。
23.在一些实施例中,当所述指部组件设置在五个所述指套部中的一个所述指套部的背部上时,所述指部组件还包括指尖套,所述指尖套与所述支撑板的一端相连,所述指尖套套设于对应的所述指套部的指尖上。
24.在一些实施例中,所述指部组件还包括约束器,所述约束器设置在所述支撑板上的上表面上,所述连续柔性体可移动地穿过所述约束器。
25.在一些实施例中,所述支撑板的一端处设有锚固点。
26.在一些实施例中,所述驱动装置的数量为1至8个,其中,不属于同一个所述驱动装置的所述指部组件在所述防护手套上的设置位置不同。
27.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
28.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
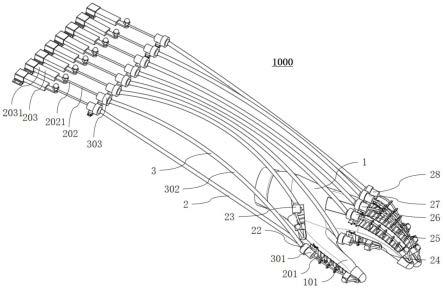
29.图1为本发明一个实施例的采用连续柔性体驱动的手部灵巧康复机器人的结构示意图。
30.图2为本发明一个实施例的采用连续柔性体驱动的手部灵巧康复机器人的局部侧视图。
31.图3为本发明一个实施例的采用连续柔性体驱动的手部灵巧康复机器人的局部主视图。
32.图4为本发明另一个实施例的采用连续柔性体驱动的手部灵巧康复机器人的结构示意图。
33.图5为本发明再一个实施例的采用连续柔性体驱动的手部灵巧康复机器人的结构示意图。
34.图6为本发明又一个实施例的采用连续柔性体驱动的手部灵巧康复机器人的结构示意图。
35.图7为本发明实施例中第二引导口的结构示意图。
36.图8为本发明实施例中钢索贯穿软管形成鲍登线结构的结构示意图。
37.图9为本发明实施例中设置在五个所述指套部中的一个所述指套部的背部上的指部组件的结构示意图。
38.图10为本发明实施例中设置在大拇指对应的所述指套部的外侧上或食指对应的所述指套部的外侧上的指部组件的结构示意图。
39.图11为本发明实施例中电动推杆组件的结构示意图。
40.图12为本发明实施例中蜗杆齿条组件的结构示意图。
41.图13为本发明实施例中电机滚筒组件的结构示意图。
42.图14为本发明实施例中链条板的结构示意图。
43.图15为本发明实施例中薄钢条或者纤维条的第一结构示意图。
44.图16为本发明实施例中薄钢条或者纤维条的第二结构示意图。
45.附图标记:
46.防护手套1
47.指套部101
48.驱动装置2
49.第一个驱动装置21
ꢀꢀ
第二个驱动装置22
ꢀꢀ
第三个驱动装置23
50.第四个驱动装置24
ꢀꢀ
第五个驱动装置25
ꢀꢀ
第六个驱动装置26
51.第七个驱动装置27
ꢀꢀ
第八个驱动装置28
52.指部组件201
ꢀꢀ
支撑板2011
ꢀꢀ
链条板20111
ꢀꢀ
指尖套2012
53.约束器2013
ꢀꢀ
锚固点2014
ꢀꢀ
连续柔性体202
ꢀꢀ
钢索2021
54.薄钢条2022
ꢀꢀ
纤维条2023
ꢀꢀ
驱动组件203
ꢀꢀ
电动推杆组件2031
55.电推杆固定座20311
ꢀꢀ
电推杆20312
ꢀꢀ
电机滚筒组件2032
56.支撑座20321
ꢀꢀ
滚筒20322
ꢀꢀ
关节电机20323
ꢀꢀ
蜗杆齿条组件2033
57.齿条20331
ꢀꢀ
电机20332
ꢀꢀ
蜗杆20333
ꢀꢀ
支架20334
58.引导组件3
59.第一引导口301
ꢀꢀ
软管302
ꢀꢀ
第二引导口303
具体实施方式
60.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
61.下面结合图1至图16来描述本发明的采用连续柔性体驱动的手部灵巧康复机器人。
62.如图1至图16所示,根据本发明实施例的采用连续柔性体驱动的手部灵巧康复机器人,包括防护手套1和驱动装置2,防护手套1包括五个指套部101;驱动装置2包括指部组件201、连续柔性体202和驱动组件203,其中,指部组件201设置在五个指套部101中的一个指套部101的背部上、大拇指对应的指套部101的外侧上、食指对应的指套部101的外侧上或腕掌关节对应的防护手套1的背部处,连续柔性体202的一端与指部组件201的一端相连且另一端与驱动组件203相连;驱动组件203控制连续柔性体202的收放,通过指部组件201将连续柔性体202传递的力转换成弯矩;
63.当指部组件201设置在五个指套部101中的一个指套部101的背部上时,弯矩控制对应的手指做伸展/屈曲运动;
64.当指部组件201设置在大拇指对应的指套部101的外侧上或食指对应的指套部101的外侧上时,弯矩相应地控制大拇指或食指做外展/内收运动;
65.当指部组件201设置在腕掌关节对应的防护手套1的背部处时,弯矩控制大拇指做对掌运动。
66.具体而言,本发明的手部灵巧康复机器人在使用时,防护手套1是穿戴于人手上的,一方面,防护手套1为驱动装置2或者驱动装置2中的部分部件提供安装位,减少或者避免驱动装置2或者驱动装置2中的部分部件直接安装在人手上容易产生不适感的情况;另一方面还可以保证人手在康复训练时的安全性。
67.防护手套1包括五个指套部101,五个指套部101对应人手的五根手指,防护手套1
穿戴在人手上时,五个指套部101一一对应地穿戴在拇指、食指、中指、无名指、小指上。
68.驱动装置2包括指部组件201、连续柔性体202和驱动组件203,其中,指部组件201设置在五个指套部101中的一个指套部101的背部上、大拇指对应的指套部101的外侧上、食指对应的指套部101的外侧上或腕掌关节对应的防护手套1的背部处,连续柔性体202的一端与指部组件201的一端相连且另一端与驱动组件203相连;驱动组件203控制连续柔性体202的收放,通过指部组件201将连续柔性体202传递的力转换成弯矩。可以理解的是,连续柔性体202用于传递驱动组件203输出的力与运动,指部组件201用于将连续柔性体202传递的力转换成弯矩,从而带动手指弯曲或者手部关节发生转动。需要说明的是,连续柔性体202具有适中的弯曲刚度和较高的拉压刚度,例如连续柔性体202可以为钢索2021、薄钢条2022或纤维条2023,以实现很好的传力作用且可以发生弯曲,本发明通过利用连续柔性体202代替现有技术中手指关节上的复杂传动机构,直接驱动手指运动,具有如下优点,第一,结构更加简单,不存在复杂刚性结构,因此成本更低,控制更为方便;第二,不会对手指造成刚性冲击,安全性好;第三、可以极大地减小本发明的手部灵巧康复机器人的质量和体积,减少了使用者的承重负担,实现了康复设备的轻量化,具有很好的便携性。
69.当指部组件201设置在五个指套部101中的一个指套部101的背部上时,弯矩控制对应的手指做伸展/屈曲运动。需要说明的是,当连续柔性体202被驱动组件203拉回时,手指做伸展运动,当连续柔性体202被驱动组件203推出时,手指做屈曲运动,手指的屈曲运动是指手指发生弯曲的运动,手指的伸展运动是与手指的屈曲运动相反的运动,即手指从弯曲后的状态恢复至手指伸直状态的运动。
70.当指部组件201设置在大拇指对应的指套部101的外侧上或食指对应的指套部101的外侧上时,弯矩相应地控制大拇指或食指做外展/内收运动。需要说明的是,当连续柔性体202被驱动组件203拉回时,大拇指或者食指作外展运动,当连续柔性体202被驱动组件203被推出时,大拇指或者食指做内收运动。具体而言,大拇指对应的指套部101的外侧上具体是指大拇指对应的指套部101上远离食指对应的指套部101的一侧,食指对应的指套部101的外侧上具体是指食指对应的指套部101上朝向拇指对应的指套部101的一侧。手指的外展运动是指在冠状面内手指远离手部中线向外的运动,手指的内收运动是指在冠状面内使手指朝向手部中线甚至越过手部中线的运动。
71.当指部组件201设置在腕掌关节对应的防护手套1的背部处时,弯矩控制大拇指做对掌运动。需要说明的是,当连续柔性体202被驱动组件203被推出时,大拇指做对掌运动,当连续柔性体202被驱动组件203拉回时,大拇指做与对掌运动相反的运动。其中,对掌运动是指大拇指去碰小指指根、无名指指根、中指指根或食指指根的运动。
72.由上可知,本发明的手部灵巧康复机器人具有模块化特征,可以根据手指康复运动需求进行不同组合,以满足多样化的手指康复运动需求,例如,如图1至图5所示,可以在五个指套部101中的每一个指套部101的背部上时、大拇指对应的指套部101的外侧上、食指对应的指套部101的外侧上和腕掌关节对应的防护手套1的背部处同时设置指部组件201,即在使用者手部上同时设置8个驱动装置2,从而使得组合后的手部灵巧康复机器人可以支持手部8个自由度的康复运动,即腕掌关节的屈曲/伸展自由度,拇指的屈曲/伸展自由度和内收/外展自由度,食指的屈曲/伸展自由度和内收/外展自由度以及中指、无名指和小指的屈曲/伸展自由度。再例如,如图6所示,可以在拇指、食指、中指对应的指套部101的背部上
时、大拇指对应的指套部101的外侧上、食指对应的指套部101的外侧上和腕掌关节对应的防护手套1的背部处同时设置指部组件201,即仅在使用者手部上同时设置6个驱动装置2,从而使得组合后的手部灵巧康复机器人可以支持6个自由度的康复运动,即腕掌关节的屈曲/伸展自由度,拇指的屈曲/伸展自由度和内收/外展自由度,食指的屈曲/伸展自由度和内收/外展自由度以及中指的屈曲/伸展自由度。
73.根据本发明实施例的采用连续柔性体驱动的手部灵巧康复机器人,一方面,本发明通过利用连续柔性体202代替现有技术中手指关节上的复杂传动机构,直接驱动手指运动,具有如下优点,第一,结构更加简单,不存在复杂刚性结构,因此本发明的手部灵巧康复机器人成本更低,控制更为方便;第二,不会对手指造成刚性冲击,安全性好;第三、可以极大地减小本发明的手部灵巧康复机器人的质量和体积,减少了使用者的承重负担,实现了康复设备的轻量化,具有很好的便携性。另一方面,本发明的手部灵巧康复机器人具有模块化特征,可以根据手指康复运动需求进行不同组合,以满足多样化的手指康复运动需求。
74.在一些实施例中,指部组件201采用3d打印的方式加工而成。采用3d打印的方式加工制备指部组件201,这样,可以根据使用者的手部特征快速构建适合使用者手部的指部组件201,从而使得本发明的手部灵巧康复机器人1000具有个体化、精准化和可快速重构的特点,可实现个体化、精准、低成本的康复运动。
75.在一些实施例中,连续柔性体202为钢索2021、薄钢条2022或纤维条2023。可以理解的是,钢索2021、薄钢条2022或纤维条2023具有适中的弯曲刚度和较高的拉压刚度,可以很好地实现力与运动的传递。具体地,钢索2021的截面可以为圆形;薄钢条2022和纤维条2023的截面可以为方形或者半圆形,但不限于此,其他截面形状或其他材料的构件,具有适中的弯曲刚度和较高的拉压刚度,可以实现力的传递,均可以作为连续柔性体202使用。
76.驱动组件203为电动推杆组件2031(如图1、图4和图6所示)、电机滚筒组件2032和蜗杆齿条组件2033(如图5所示)。具体而言,电动推杆组件2031包括电推杆固定座20311和电推杆20312,电推杆20312的一端安装在电推杆固定座20311上,电推杆20312的另一端与连续柔性体202固定连接(如图11所示)。电机滚筒组件2032包括支撑座20321、滚筒20322、关节电机20323,滚筒20322转动安装在支撑座20321上,关节电机20323与滚筒20322中心转轴固定连接,滚筒20322用于卷绕钢索2021,通过关节电机20323驱动滚筒20322转动,实现对钢索2021的收放(如图13所示)。蜗杆齿条组件2033包括齿条20331、电机20332、蜗杆20333和支架20334,电机20332的输出轴与蜗杆20333固定连接,蜗杆20333固定在支架20334上,齿条20331与连续柔性体202连接,蜗杆20333旋转带动齿条20331移动,从而带动连续柔性体202移动,实现连续柔性体202的收放过程(如图12所示)。
77.其中,当连续柔性体202为钢索2021时,驱动组件203为电动推杆组件2031或蜗杆齿条组件2033且固定在防护手套1上或不固定在防护手套1上。也就是说,本发明包含如下实施例,电动推杆组件2031固定在防护手套1上,控制钢索2021收放;蜗杆齿条组件2033固定在防护手套1上,控制钢索2021收放;电动推杆组件2031不固定在防护手套1上,例如固定在远离防护手套1的位置处,控制钢索2021收放;蜗杆齿条组件2033不固定在防护手套1上,例如固定在远离防护手套1的位置处,控制钢索2021收放。
78.或连续柔性体202为钢索2021时,驱动组件203为电机滚筒组件2032且不固定在防护手套1上。也就是说,本发明包括如下实施例,电机滚筒组件2032固定在远离防护手套1的
位置处,控制钢索2021的收放。当驱动组件203为电机滚筒组件2032时,由于电机滚筒组件2032体积较大,较重,因此需要布置在远离防护手套1的位置处以减小使用者手部的承重负担。
79.当连续柔性体202为薄钢条2022或纤维条2023时,驱动组件203为电动推杆组件2031或蜗杆齿条组件2033且固定在防护手套1上。也就是说,本发明包含如下实施例,电动推杆组件2031固定在防护手套1上,控制薄钢条2022收放;电动推杆组件2031固定在防护手套1上,控制纤维条2023的收放;蜗杆齿条组件2033固定在防护手套1上,控制薄钢条2022的收放;蜗杆齿条组件2033固定在防护手套1上,控制纤维条2023的收放。将电动推杆组件2031和蜗杆齿条组件2033设置在防护手套1上,这样可以避免薄钢条2022或纤维条2023过长,质量过重,增加使用者手部负重的问题。如图12、图15和图16所示,当连续柔性体202为薄钢条2022和纤维条2023时,可以直接在薄钢条2022和纤维条2023上靠近端部的位置开设与蜗杆20333配合的齿槽,作为齿条20331使用。
80.在一些实施例中,如图1至图3所示,当连续柔性体202为钢索2021且不固定在防护手套1上时,钢索2021上设有引导组件3,引导组件3位于驱动组件203和指部组件201之间,用于对连续柔性体202的运动方向进行引导,从而可以很好地避免钢索2021在收放过程中与其他结构直接接触产生磨损或者干涉。
81.在一些实施例中,引导组件3包括第一引导口301、软管302和第二引导口303,第一引导口301和第二引导口303分别固定在软管302的两端,第一引导口301固定在防护手套1上且靠近指部组件201,第二引导口303不固定在防护手套1上且远离指部组件201,连续柔性体202可移动地穿过第一引导口301、软管302和第二引导口303。可以理解的是,第一引导口301和第二引导口303用于固定软管302两端的位置,软管302用于引导钢索2021的传递方向,钢索2021外部包裹软管302形成鲍登线结构(如图8所示)。驱动组件203控制连续柔性体202收放时,钢索2021会沿着软管302在软管302中滑动,进行力与运动的传递,引导组件3的设置用于避免钢索2021与其他结构直接接触产生磨损或者干涉。
82.在一些实施例中,第一引导口301包括第一底座,第二引导口303包括第二底座(如图7所示),第一引导口301通过第一底座可拆卸地固定在防护手套1上,第二引导口303通过第二底座可拆卸地固定在远离防护手套1的位置处(即第二引导口303不固定在防护手套1上)。具体地,第一底座和第二底座可以通过尼龙扣、卡扣或粘接的方式实现固定。
83.在一些实施例中,指部组件201包括支撑板2011;支撑板2011能弯曲但不能拉伸;
84.当指部组件201设置在五个指套部101中的一个指套部101的背部上时,支撑板2011的一端与对应的指套部101的指尖处固定,例如可以通过尼龙扣或者卡扣的方式固定,支撑板2011的另一端与对应的指套部101的基部处固定,例如可以通过尼龙扣或者卡扣的方式固定,连续柔性体202的一端固定在支撑板2011的一端处,从而连续柔性体202可以驱动使得对应指套部101上的支撑板2011发生弯曲,进而可以控制对应手指做伸展/屈曲运动。
85.当指部组件201设置在大拇指对应的指套部101的外侧上或食指对应的指套部101的外侧上时,支撑板2011的一端相应地与大拇指或食指的近侧指间关节与远侧指间关节之间的位置对应的指套部101固定,例如可以通过尼龙扣或者卡扣的方式固定,支撑板2011的另一端相应地与大拇指或食指对应的指套部101的基部处固定,例如可以通过尼龙扣或者
卡扣的方式固定,连续柔性体202的一端固定在支撑板2011的一端处,从而连续柔性体202可以驱动使得支撑板2011发生弯曲,进而可以控制大拇指或食指做外展/内收运动。
86.当指部组件201设置在腕掌关节对应的防护手套1的背部处时,支撑板2011的一端与大拇指掌腕关节对应的防护手套1的背部处固定,例如可以通过尼龙扣或者卡扣的方式固定,支撑板2011的另一端与食指掌腕关节对应的防护手套1的背部处固定,例如可以通过尼龙扣或者卡扣的方式固定,连续柔性体202的一端固定在支撑板2011的一端,从而连续柔性体202可以驱动使得支撑板2011发生弯曲,进而可以控制大拇指做对掌运动。
87.在一些实施例中,支撑板2011为波浪形塑料板、波浪形纤维板或链条板20111。可以理解的是,波浪形塑料板、波浪形纤维板或链条板20111均具有易弯曲不易伸缩的特点,其他具有易弯曲不易拉伸的部件也可以作为支撑板2011使用。如图14所示,链条板20111为多个链节相互铰接形成。
88.在一些实施例中,当指部组件201设置在五个指套部101中的一个指套部101的背部上时,指部组件201还包括指尖套2012,指尖套2012与支撑板2011的一端相连,指尖套2012套设于对应的指套部101的指尖上。通过设置指尖套2012,当连续柔性体202拉动指尖时,连续柔性体202首先拉动指尖套2012,然后再由指尖套2012拉动指尖,这样可以降低手指受伤的风险。具体地,当指部组件201包括指尖套2012时,支撑板2011的一端通过尼龙扣或者卡扣固定在指尖套2012上。
89.在一些实施例中,指部组件201还包括约束器2013,约束器2013设置在支撑板2011上的上表面上,连续柔性体202可移动地穿过约束器2013。可以理解的是,设置约束器2013可以对连续柔性体202的移动起到导向和约束的作用。具体地,约束器2013可以通过尼龙扣或卡扣固定在支撑板2011上,支撑板2011上的约束器2013数量可以根据使用者不同手指的长度进行个性化增减,即约束器2013可以根据手指的长度设置一个、多个或者选择不设置约束器2013,以保证使用本发明实施例的手部灵巧康复机器人进行康复运动时的有效性、合理性和可调整性。具体地,约束器2013上设有开孔,开孔的形状与钢索2021、薄钢条2022和纤维条2023的截面形状相适配。例如,钢索2021的截面为圆形时,约束器2013上的开孔形状也为圆形,薄钢条2022或者纤维条2023的截面为方形或者圆弧形时,约束器2013上的开孔形状也为方形或者圆弧形。
90.如图9所示,当约束器2013设置有多个时,多个约束器2013沿着支撑板2011的延伸方向间隔开地设置,约束器2013上设有开孔。沿着手背到指尖的方向依次设置的多个约束器2013上的开孔中心距离支撑板2011上表面的距离逐渐减小,连续柔性体202的一端沿着手背到指尖的方向顺次贯穿多个约束器2013的开孔后,与支撑板2011的一端固定。当驱动组件203推出连续柔性体202时,连续柔性体202会被约束器2013的开孔上端约束,在不同约束器2013之间发生弯曲,推动支撑板2011的一端,带动支撑板2011发生弯曲,同时支撑板2011会卸载掉连续柔性体202伸长方向的力,使五指屈曲;当驱动组件203拉回连续柔性体202时,连续柔性体202被约束器2013的开孔下端约束,在不同约束器2013之间的弯曲逐渐减小,拉动支撑板2011的一端,带动支撑板2011从弯曲状态逐渐恢复,同时支撑板2011卸载掉收缩方向的力,使五指伸展。综上,设置多个约束器2013和支撑板2011均用于使得连续柔性体202传递的沿手指延伸方向的压力和拉力更多地转化成驱动手指弯曲的力,从而使得本发明的手部灵巧康复机器人1000使用效果更好。
91.在一些实施例中,如图9和图10所示,支撑板2011的一端处设有锚固点2014。需要说明的是,锚固点2014用于将连续柔性体202的一端固定在支撑板2011的一端处。采用锚固点2014固定连续柔性体202,固定方式更加简单,操作更加方便。当指部组件201包括指尖套2012时,锚固点2014固定在指尖套2012上;当指部组件201设置在大拇指对应的指套部101的外侧上、食指对应的指套部101的外侧上或腕掌关节对应的防护手套1的背部处时,锚固点2014固定在支撑板2011的一端对应的防护手套1上。
92.在一些实施例中,驱动装置2的数量为1至8个,其中,不属于同一个驱动装置2的指部组件201在防护手套1上的设置位置不同。驱动装置2的数量为1至8个,也就是说,可以仅设置一个驱动装置2在手部上,也可以同时设置8个驱动装置2在手部上,或者同时设置5个驱动装置2在手部上,等等。本发明的手部灵巧康复机器人1000具有模块化特征,可以根据不同患者的不同手部特征以及康复需求,仅在需要康复的手指上设置驱动装置2,以适应不同手部康复需求,实现快速化、精准化、个性化手部康复需求。不属于同一个驱动装置2的指部组件201在防护手套1上的设置位置不同,例如当驱动装置2设置有8个时,对应地,指部组件201也设置有8个,8个指部组件201分别对应地设置在五个指套部101的背部处、大拇指对应的指套部101的外侧上、食指对应的指套部101的外侧上和腕掌关节对应的防护手套1的背部处,如图1和图2所示,第一个驱动装置21控制拇指的内收/外展运动,第二个驱动装置22控制拇指的屈曲/伸展运动,第三个驱动装置23控制腕掌关节的屈曲/伸展运动,第四个驱动装置24控制食指的内收/外展运动,第五个驱动装置25控制食指的屈曲/伸展运动,第六个驱动装置26控制中指的屈曲/伸展运动,第七个驱动装置27控制无名指的屈曲/伸展运动,第八个驱动装置28控制小指的屈曲/伸展运动,以实现带动手部进行八个自由度的运动,包括腕掌关节一个自由度,拇指两个自由度,食指两个自由度,中指、无名指和小指各一个自由度。
93.下面结合说明书附图描述本发明的具体实施例中采用连续柔性体驱动的手部灵巧康复机器人的具体结构。本发明的实施例可以为前述的多个技术方案进行组合后的所有实施例,而不局限于下述具体实施例。
94.实施例1
95.一种采用连续柔性体驱动的手部灵巧康复机器人,如图1至图3所示,包括防护手套1、电动推杆组件2031、钢索2021、第一引导口301、软管302、第二引导口303、支撑板2011、约束器2013、指尖套2012和锚固点2014,其中,支撑板2011设置在防护手套1的五个指套部101中的一个指套部101的背部上。电动推杆组件2031不固定在防护手套1上,钢索2021的另一端与电动推杆组件2031连接,第一引导口301和第二引导口303分别固定在软管302的两端,第一引导口301固定在防护手套1上且靠近指部组件201,第二引导口303不固定在防护手套1上且远离指部组件201,钢索2021贯穿第二引导口303、软管302、第一引导口301,指尖套2012套设于对应的指套部101的指尖上,指尖套2012上固定有第一锚固点2014,支撑板2011的一端固定在指尖套2012上,支撑板2011的另一端与对应的指套部101的基部处固定,支撑板2011的上表面上设置有多个约束器2013,多个约束器2013沿着支撑板2011的延伸方向间隔开地设置,约束器2013上设有开孔,沿着手背到指尖的方向依次设置的多个约束器2013上的开孔中心距离支撑板2011上表面的距离逐渐减小,钢索2021的一端沿着手背到指尖的方向顺次贯穿多个约束器2013的开孔后,固定在锚固点2014上。
96.实施例2
97.一种采用连续柔性体驱动的手部灵巧康复机器人,如图1所示,在实施例1的基础上,不设置指尖套2012和约束器2013,支撑板2011设置在腕掌关节对应的防护手套1的背部处,锚固点2014固定在支撑板2011的一端处,支撑板2011的一端与大拇指掌腕关节对应的防护手套1的背部处固定,支撑板2011的另一端与食指掌腕关节对应的防护手套1的背部处固定。
98.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
99.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。