1.本发明涉及发射技术领域,尤其涉及一种电磁发射系统的发射方法。
背景技术:
2.电磁发射装置一直是各国研究的热点,电磁发射相对于传统的火药发射方式具有非常大的优势,比如弹丸出口速度高、动能大、能量可控等。电磁发射技术在航空航天等领域具有十分优越的发展前景。电磁发射装置作为电磁发射技术的重要一环,具有非常重要的研究价值。
3.目前针对发射装置的研究主要以火炮为主,电磁发射装置的研究相对较少。火炮发射装置主要是以手动方位调转和手动俯仰从而实现目标的跟踪,这种方式发射准备时间长、发射效率低、连续发射能力差。
4.因此,需要一种具有发射速度快,跟踪响应快的发射设备。
技术实现要素:
5.鉴于上述的分析,本发明旨在提供一种电磁发射系统的发射方法,用以解决现有灭火工具难以实现远距离灭火,发射灭火弹时灭火弹的飞行距离难以控制的问题。
6.本发明的目的主要是通过以下技术方案实现的:
7.一种电磁发射系统的发射方法,其特征在于,包括以下步骤:
8.步骤s1:发射转塔调整姿态,探测装置探测目标位置和距离;
9.步骤s2:发射转塔根据探测装置探测到的目标位置信息继续调整姿态,实现对目标的跟踪和定位;
10.步骤s3:电磁发射器发射负载。
11.进一步地,所述步骤s1中,探测装置探测目标位置和距离的具体方式为:
12.步骤s11:发射转塔通过俯仰传动机构和方位传动机构调整摇架的姿态,进而改变摇架上的探测装置的方位角和俯仰角;
13.步骤s12:摇架保持姿态变化直至目标出现在探测装置的变焦可见光摄像头的视野中;完成目标位置的探测;
14.步骤s13:探测装置通过激光测距机探测目标位置与发射点之间的距离。
15.进一步地,所述步骤s2中,目标的跟踪和定位过程为:
16.步骤s21:探测装置控制变焦可见光摄像头的放大倍率,调整目标在显示屏中的位置;
17.步骤s22:发射转塔根据探测装置探测到的被瞄准目标的位置信息调整姿态,保持目标始终位于显示屏中;变焦可见光摄像头调整至最大倍率时,发射转塔调整姿态,使目标在显示屏上居中;
18.步骤s23:激光测距机探测目标与发射点之间的距离。
19.进一步地,所述激光测距机测量目标距离的方式为:多次测量,去掉最高值和最小
值后取平均值作为目标与发射点之间的距离标准值。
20.进一步地,所述步骤s1和步骤s2中,发射转塔的姿态调整方式为:
21.步骤q1:通过俯仰传动机构调节发射转塔的俯仰运动;所述俯仰传动机构控制电动缸伸缩;进而带动摇架相对于转台发生俯仰角度的偏转;
22.步骤q2:通过方位传动机构调节发射转塔的方位运动;具体地,方位传动机构输出转矩,进而带动发射转塔的转台相对于基座1旋转;转台旋转时,带动摇架及摇架上安装的电磁发射器和探测装置同步运动。
23.步骤q3:俯仰传动机构和方位传动机构运动时,通过俯仰测角组合和方位测角组合,实时监测摇架的俯仰角和方位角。
24.进一步地,步骤s3中,电磁发射器发射负载的过程为:
25.步骤s31:将负载装填到电磁发射器中,使负载与发射电枢并列;并通过到位传感器监测负载是否装填到位;所述负载装填到位时,发射电枢与定位筒上的到位传感器接触。
26.步骤s32:驱动线圈通电后与发射电枢产生电磁感应,驱动发射电枢相对于驱动线圈直线位移。
27.步骤s33:发射电枢直线位移时,推动负载同步运动,提供负载发射出筒的初始速度。
28.进一步地,所述负载发射出筒后,电磁发射器在后坐力的作用下相对于摇架后移;并通过反后坐装置缓冲后坐力。
29.进一步地,所述电磁发射系统包括:发射转塔、电磁发射器、探测装置;所述发射转塔包括:俯仰传动机构、方位传动机构和摇架;所述俯仰传动机构用于调节摇架的俯仰角;所述方位传动机构用于调节摇架的周向方位;所述电磁发射器和探测装置均安装在所述摇架上;所述探测装置用于探测目标位置;所述电磁发射器包括:驱动线圈和发射电枢;所述驱动线圈通过电磁感应能够驱动所述发射电枢位移;所述发射电枢和负载并列设置,用于发射负载。
30.进一步地,所述发射转塔还包括:基座和转台;所述转台转动安装在基座上,所述方位传动机构用于驱动所述转台相对于所述基座周向转动;所述摇架通过所述俯仰传动机构安装在转台上,且所述俯仰传动机构用于驱动所述摇架俯仰运动;所述摇架上设置反后坐装置;所述电磁发射器滑动安装在摇架上,且所述电磁发射器与反后坐装置相连接。
31.进一步地,所述摇架包括:摇臂、上套箍、下套箍、前套箍和导轨;所述导轨固定安装在所述摇臂的内侧;且所述电磁发射器与所述导轨滑动配合。
32.本发明技术方案至少能够实现以下效果之一:
33.1.本发明的电磁发射系统的发射方法,通过将探测装置与转塔摇架固定,探测装置与转塔摇架同步运动,进而实现在调整发射姿态以及实现对目标位置的探测,当对目标位置完成精准探测的同时实现了对目标位置的精准瞄准,保证了发射精度。
34.2.本发明在电磁发射器的轴向方向上,共设置两组支承组件,通过在所述导向段上设有前支承,所述后坐段上设置后支承;所述前支承和后支承用于与导轨滑动配合;当整个电磁发射器受到反冲力作用时,可由支承组件带动发射装置在导轨的滑动平面上产生后坐滑移,并通过反后坐装置消除后坐力,避免后坐力对结构产生损坏。
35.3.本发明的电磁发射系统,通过调节发射转塔的俯仰传动机构和方位传动机构,
那个实现对目标位置的跟踪和响应,进而实现精准快速的发射负载(发射灭火弹等)
36.本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
37.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
38.图1为本发明的电磁发射系统的发射转塔;
39.图2为本发明的电磁发射系统的侧视图;
40.图3为发射转塔的基座结构示意图;
41.图4为发射转塔的转台;
42.图5为发射转塔的俯仰传动机构;
43.图6为发射转塔的方位传动机构;
44.图7为发射转塔的摇架主视图;
45.图8为图7的揺架的剖视图;
46.图9为图7的揺架左视图。
47.图10为本发明的电磁发射系统的电磁发射器;
48.图11为电磁发射器的加速段;
49.图12为电磁发射器的加速段的剖视图;
50.图13为电磁发射器的发射原理图;
51.图14为电磁发射器的发射电枢;
52.图15为电磁发射器的后坐段;
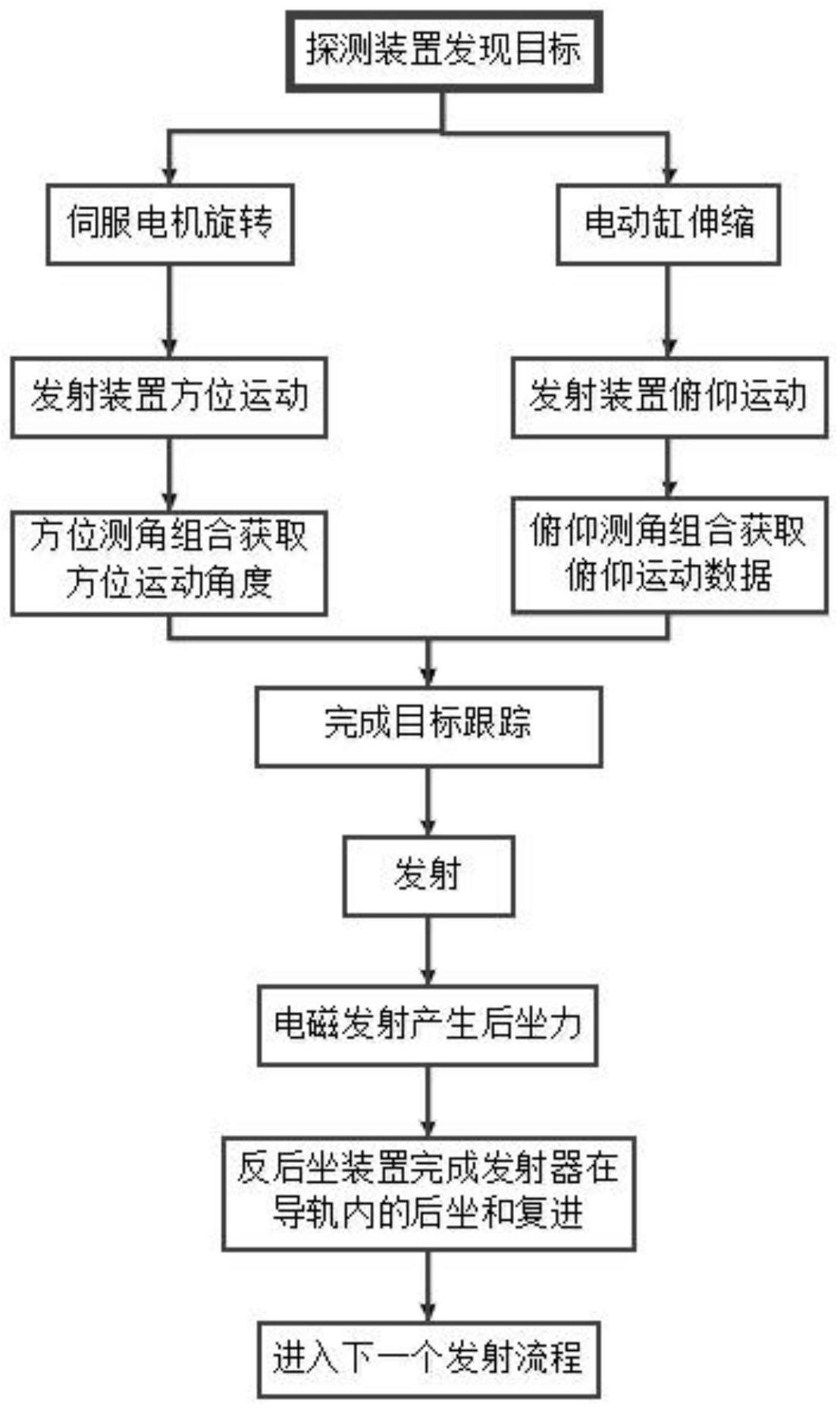
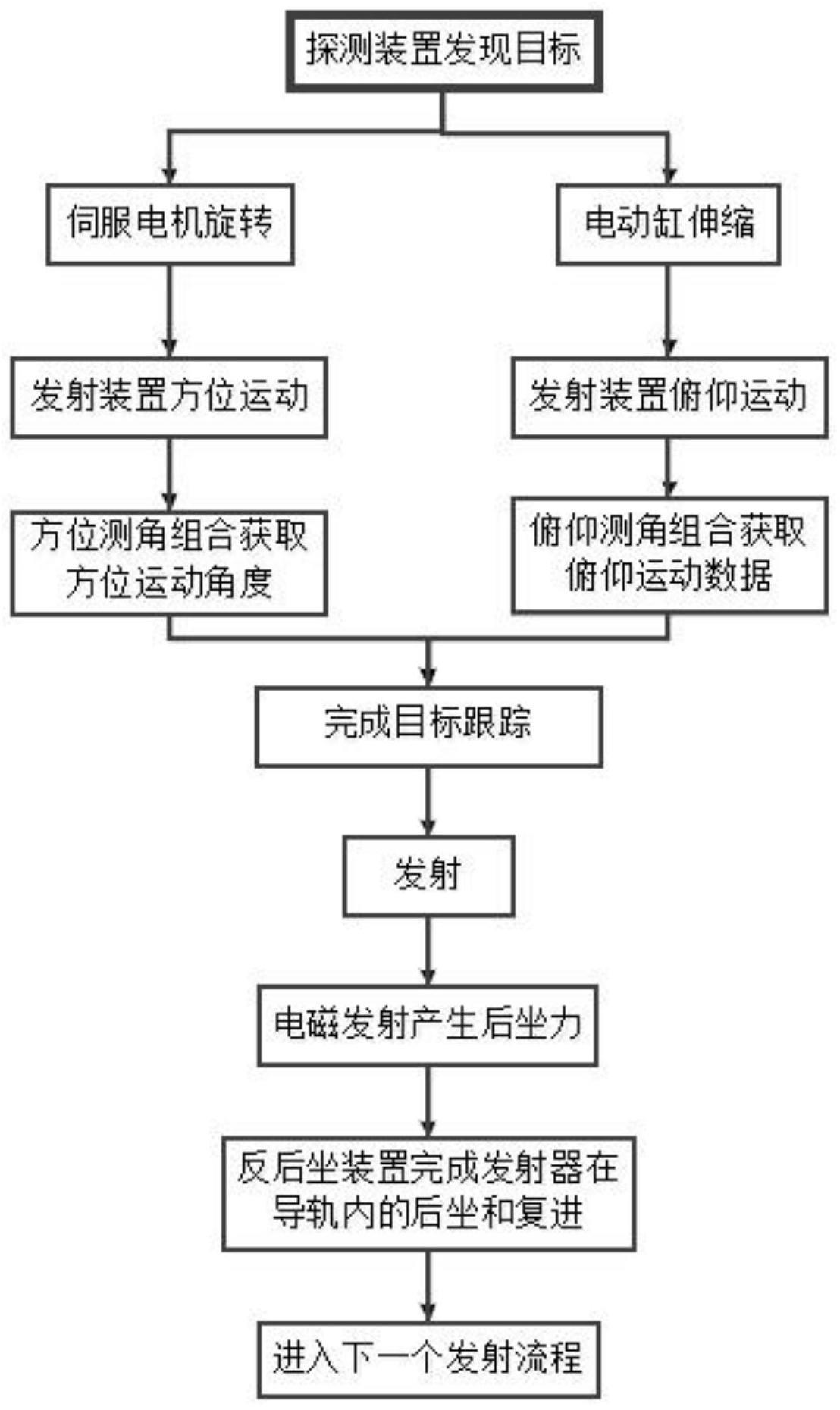
53.图16为电磁发射系统的发射流程图。
54.附图标记:
55.1-基座;2-转台;3-俯仰传动机构;4-方位传动机构;5-摇架;6-电磁发射器;7-负载;
56.11-底座;12-缓冲器支架;13-缓冲器;14-筋板;
57.21-转盘轴承;22-支撑平台;23-支臂;24-挡板;25-方位测角组合; 26-俯仰测角组合;27-电缆安装板;
58.31-电动缸;32-上支耳;33-下支耳;34-定位销;
59.41-伺服电机;42-减速器;43-小齿轮;44-挡盖;
60.51-摇臂;52-上套箍;53-下套箍;54-前套箍;55-上支撑板;56-下支撑板;57-导轨;58-探测装置;59-反后坐装置;521-固定孔;
61.61-导引段;62-加速段;63-后坐段;64-定位筒;65-到位传感器;66
‑ꢀ
发射电枢;
62.611-前支承;
63.621-前绝缘挡圈;622-第一紧固钢骨;623-后绝缘挡圈;624-第二紧固钢骨;625-驱动线圈;626-螺栓组件;627-电缆连接接头;628-绝缘垫板;
64.631-后支承;632-后坐连接板;
65.661-电枢外筒;662-电枢衬套;663-电枢挡圈。
具体实施方式
66.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本发明一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
67.实施例1
68.本发明的一个具体实施例,公开了一种电磁发射系统的发射方法,采用一种具有目标跟踪功能的电磁发射系统,电磁发射系统包括:发射转塔、电磁发射器6和探测装置58;如图1-15所示。
69.其中,发射转塔包括:俯仰传动机构3和方位传动机构4,能够实现对发射转塔的摇架5的方位角度和俯仰角度的调节。
70.电磁发射器6安装在发射转塔的摇架5上,能够实现对负载7的电磁发射,负载7的类型可以是灭火弹、烟雾弹或爆破弹等。
71.探测装置58固定安装在摇架5上。
72.探测装置58包括:变焦可见光摄像头、定焦可见光摄像头、红外摄像头和激光测距机;所述变焦可见光摄像头、定焦可见光摄像头和红外摄像头用于探测目标位置,所述激光测距机用于探测目标位置与发射点的距离。确定目标位置后,进而确定负载的发射速度,使负载能够精准发射到目标位置。
73.方位测角组合25和俯仰测角组合26;探测装置58用于探测目标位置,根据实际需求,目标位置可以为起火点、爆破点等。方位测角组合 25和俯仰测角组合26能够实时监测摇架5的方位角度和俯仰角度,进而实现对电磁发射器6发射负载时的俯仰角度和方位角度的调节。
74.如图16所示,具体地,本发明的发射方法包括以下步骤:
75.步骤s1:发射转塔调整姿态,探测装置58探测目标位置和距离;
76.步骤s2:发射转塔根据探测装置58探测到的目标位置信息继续调整姿态,实现对目标的跟踪和定位;
77.步骤s3:电磁发射器6发射负载。
78.所述步骤s1中,探测装置58探测目标位置和距离的具体方式为:
79.步骤s11:发射转塔通过俯仰传动机构3和方位传动机构4调整摇架 5的姿态,进而改变摇架5上的探测装置58的方位角和俯仰角;
80.步骤s12:摇架5保持姿态变化直至目标出现在探测装置58的变焦可见光摄像头的视野中;完成目标位置的探测;
81.步骤s13:探测装置58通过激光测距机探测目标位置与发射点之间的距离。
82.所述步骤s2中,目标的跟踪和定位过程为:
83.步骤s21:探测装置58控制变焦可见光摄像头的放大倍率,调整目标在显示屏中的位置;
84.步骤s22:发射转塔根据探测装置58探测到的被瞄准目标的位置信息调整姿态,保持目标始终位于显示屏中;变焦可见光摄像头调整至最大倍率时,发射转塔调整姿态,使目
标在显示屏上居中;
85.步骤s23:激光测距机探测目标与发射点之间的距离;具体地,激光测距机测量目标距离的方式为:多次测量,去掉最高值和最小值后取平均值作为目标与发射点之间的距离标准值。
86.通过探测装置58的变焦可见光摄像头逐级增大倍率,逐步锁定目标位置,实现对目标位置的跟踪,确定精准目标的位置。
87.进一步地,确定目标位置后,根据探测装置58测得的目标的位置信息,计算电磁发射器6发射灭火弹7需要的俯仰角、方位角和发射速度;进一步,通过发射转塔的俯仰传动机构3和方位传动机构4调整摇架5 到发射所需的俯仰角和方位角;对目标位置进行瞄准,进而通过电磁发射器6发射灭火弹7。
88.所述步骤s1和步骤s2中,发射转塔的姿态调整方式为:
89.步骤q1:通过俯仰传动机构3调节发射转塔的俯仰运动;具体地,俯仰传动机构3控制电动缸31伸缩;进而带动摇架5相对于转台2发生俯仰角度的偏转;
90.步骤q2:通过方位传动机构4调节发射转塔的方位运动;具体地,方位传动机构4输出转矩,进而带动发射转塔的转台2相对于基座1旋转;转台2旋转时,带动摇架5及摇架5上安装电磁发射器6和探测装置58同步运动。
91.步骤q3:俯仰传动机构3和方位传动机构4运动时,通过俯仰测角组合26和方位测角组合25,实时监测摇架5的俯仰角和方位角。
92.步骤s3中,电磁发射器6发射负载7的过程为:
93.步骤s31:将负载7装填到电磁发射器6中,使负载7与发射电枢 66并列;并通过到位传感器65监测负载7是否装填到位;所述负载7装填到位时,发射电枢66与定位筒64上的到位传感器65接触。
94.步骤s32:驱动线圈625通电后与发射电枢66产生电磁感应,驱动发射电枢66相对于驱动线圈625直线位移。
95.步骤s33:发射电枢66直线位移时,推动负载7同步运动,提供负载7发射出筒的初始速度。
96.步骤s34:负载7发射出筒后,电磁发射器6在后坐力的作用下相对于摇架5后移;并通过反后坐装置59缓冲后坐力。
97.具体地,摇架5上固定安装:上套箍52、下套箍53和导轨57;所述电磁发射器6上设置前支承611和后支承631;所述前支承611和后支承631均与导轨57滑动配合;所述电磁发射器6夹持固定在上套箍52、下套箍53之间。
98.所述负载7发射出筒后,电磁发射器6在后坐力作用下沿导轨57向后滑移,电磁发射器6后移时通过反后座装置57缓冲后坐力。
99.进一步地,反后坐装置57缓冲后坐力后推动电磁发射器6复位,电磁发射器6在反后坐装置57的推动下沿导轨57滑移至初始位置;同时,反后坐装置57恢复初始状态。
100.具体地,反后坐装置57为弹性部件、阻尼器或者弹性件和阻尼器的结合结构。
101.为了实现上述发射方法,本发明的电磁发射系统的结构组成如图 1-15所示。
102.下面介绍各部分具体结构:
103.(1)发射转塔
104.本发明的一种具体实施方式中,发射转塔包括:基座1、转台2、俯仰传动机构3、方位传动机构4和摇架5。所述转台2转动安装在基座1 上,所述方位传动机构4用于驱动所述转台2相对于所述基座1周向转动;所述摇架5通过所述俯仰传动机构3安装在转台2上,且所述俯仰传动机构3用于驱动所述摇架5俯仰运动;所述摇架5用于装载发射器6;所述摇架5上设置反后坐装置59;所述发射器6滑动安装在摇架5上,且所述发射器6与反后坐装置59相连接。
105.如图1-9所示,转台2安装在基座1的上方,方位传动机构4通过螺栓与转台2固定连接,摇架5后部两侧与转台2上部的两个支臂23铰接,俯仰传动机构3的一端与转台2的中部铰接,另一端与摇架5的前部铰接。发射器6通过导轨57以及反后坐装置59与揺架5相连。
106.本发明的一种具体实施方式中,基座1包括:底座11、缓冲器支架 12、缓冲器13和筋板14;如图3所示,筋板14与底座11焊接而成,缓冲器支架12通过螺栓安装在底座11上,缓冲器13通过圆螺母与缓冲器支架12固定连接。基座1的主要作用是为发射装置提供安装基准,同时具有方位缓冲止挡的功能。
107.本发明的一种具体实施方式中,如图4所示,转台2包括:转盘轴承 21、支撑平台22、支臂23、挡板24、方位测角组合25、俯仰测角组合26 和电缆安装板27。转台2的作用是支撑摇架5,同时具有方位回转的功能。
108.具体地,支撑平台22通过转盘轴承21转动安装在基座1上;转盘轴承 21下表面与基座1通过螺栓连接,转盘轴承21上表面与支撑平台22通过螺栓连接,转盘轴承21的作用是提供回转支撑。左右两个支臂23位于圆形支撑平台22的两侧,支臂23通过螺栓与支撑平台22固定连接。挡板24通过螺栓与支撑平台22固定连接。如图4所示,挡板24为半包围式结构,挡板24的下端部凸出于转台2的下表面,当转台2发生周向转动时,挡板24 能够与缓冲器13接触。挡板24与基座1上的缓冲器13相配合,达到方位回转止挡的目的,增加了方位运动的安全性。
109.具体地,方位测角组合25位于转台的左前方,与支撑平台22螺纹连接;方位测角组合25包括:测量齿轮和编码器;所述测量齿轮与转盘轴承21啮合,所述编码器用于监测测量齿轮的旋转圈数,进而判断转盘轴承21的旋转角度。进一步地,方位测角组合25实时获取回转角度,同时反馈给为控制中心,以便于对目标的方位跟踪。
110.具体地,俯仰测角组合26安装在支臂23与摇臂51的铰接轴孔处,俯仰测角组合26的作用是实时获取俯仰角度,同时反馈给为控制中心,以便于实现对目标俯仰跟踪。俯仰测角组合26为角度传感器,能够用于监测摇臂51的俯仰角度。示例性地,俯仰测角组合26为角度传感器,用于监测摇臂51和支臂23之间的角度变化。
111.所述电缆安装板27用于连接各部件的用电线缆和中心控制器。
112.本发明的一种具体实施方式中,如图5所示,俯仰传动机构3包括:电动缸31、上支耳32、下支耳33和定位销34。
113.具体地,上支耳32与摇架5的摇臂51焊接在一起,下支耳33与转台2的支撑平台22焊接固定。电动缸31一端通过定位销34与上支耳32 转动连接,另一端通过定位销34与下支耳33连接。本发明中,电动缸 31、支臂23和摇臂51构成三角形结构,当电动缸31伸缩时,电动缸31 和摇臂51同步偏转,通过电动缸31的伸缩可实现摇架5的俯仰运动,进而实现发射器6的俯仰运动,调整发射角度。
114.所述摇臂51一端与所述电动缸31铰接,另一端与所述支臂23的上端铰接;所述电动缸31输出直线位移时,所述摇臂51发生俯仰运动。
115.本发明的一种具体实施方式中,如图6所示,方位传动机构4包括:伺服电机41、减速器42、小齿轮43和挡盖44。
116.具体地,伺服电机41用于输出旋转运动。减速器42通过螺栓固定在支撑平台22上。伺服电机41的输出轴与减速器42的输入轴固定连接,减速器42的输出轴端固定安装小齿轮43。
117.具体地,小齿轮43与转盘轴承21啮合。转盘轴承21的内圈侧面设置啮合齿圈,所述啮合齿圈能够与小齿轮43啮合传动,小齿轮43转动时,转盘轴承21的内圈带动支撑平台22同步旋转运动。小齿轮43旋转时能够通过转盘轴承21带动支撑平台22旋转,伺服电机41为发射器6的方位运动的动力源,通过控制伺服电机可实现对发射器6的方位运动的精确控制。
118.进一步地,所述摇臂51与所述俯仰传动机构3连接;能够在俯仰传动机构的带动下俯仰运动。所述上套箍52和下套箍53均固定安装在所述摇臂51上,且所述上套箍52与下套箍53对称设置;所述发射器6穿过所述前套箍54固定在所述上套箍52和下套箍53之间;且所述发射器 6与所述导轨57滑动配合。
119.本发明的一种具体实施方式中,如图7、图8所示,摇架5包括:摇臂 51、上套箍52、下套箍53、前套箍54、上支撑板55、下支撑板56、导轨 57和反后坐装置59。摇架5的作用是支撑发射器6,同时承受电磁发射产生的后坐力。
120.具体地,上套箍52、下套箍53、前套箍54、上支撑板55、下支撑板 56、导轨沿摇臂51的中心线成对称分布。
121.具体地,下套箍53位于摇臂51的下后方,下支撑板56位于摇臂51的前部下方。下套箍53和下支撑板56与摇臂51的下部通过焊接实现固定连接。上套箍52、上支撑板55和前套箍54由后向前依次通过螺接固定安装与摇臂51的上方。
122.具体地,如图9所示,l型的导轨57焊接在摇臂51的内侧。导轨57共4 段,导轨57在两侧的摇臂51上前后设置两组,每组对称设置两段导轨57。四段导轨57与上套箍52和前套箍54配合形成一个滑道,使得发射器6夹紧固定在滑道内,且在后坐力作用下发射器能够在滑道内运动。
123.本发明的一种具体实施方式中,所述摇架5上还设有探测装置58。
124.进一步地,探测装置58通过螺栓连接在上支撑板55上,探测装置58 的作用是发现目标,并将目标反馈给控制系统,控制系统根据目标数据下发指令,带动发射装置完成发射任务。
125.(2)电磁发射器
126.电磁发射装置,如图10所示包括:导引段61、加速段62和后坐段 63。
127.所述加速段62包括:驱动线圈625、加强骨架和发射电枢66;所述加强骨架罩设在所述驱动线圈625的外部;所述驱动线圈625内部设置发射电枢66,所述发射电枢66能够在所述驱动线圈625产生的电磁力的作用下沿所述驱动线圈625的轴线方向直线位移;所述发射电枢66用于提供负载8发射的推动力;所述导引段61用于导向所述负载8的出筒姿态。
128.导引段61:
129.具体地,导引段,包括:导向筒和前支承组件611。导向筒为圆筒式结构,用于保证负载7(例如:灭火弹)出筒时的姿态;导向筒材料选用高强度非金属材料,在发射时的强磁场环境下,保证导向筒中不产生感应涡流。前支承611为凸出于导向筒的平板结构,与导向筒固定连接,前支承611对整个电磁发射装置起支撑作用。为了保证强度,支承组件选用金属材料。导引段61与加速段62通过法兰连接,法兰上设置连接所需要的螺栓和销钉。
130.加速段62:
131.具体地,如图11、图12所示,加速段62包括:加强骨架、驱动线圈625、电缆连接接头627、定位筒64以及到位传感器65。
132.所述驱动线圈625设有五级,即五个驱动线圈625并列设置,提供电磁发射所需的驱动力。进一步地,驱动线圈625的外部设置电缆连接接头 627,每一级驱动线圈625均设有一个电缆连接接头627,所述电缆连接接头627与电源通过同轴电缆进行连接;进一步地,在电缆连接接头627处应做好绝缘处理,电缆连接接头627的个数与驱动线圈625的个数对应。
133.具体地,加强骨架用于对驱动线圈625进行径向的约束。
134.根据驱动线圈的发射原理,驱动线圈625用于产生电磁涡流,并通过电磁力驱动内部的发射电枢66沿驱动线圈625的轴线方向运动。驱动线圈 625与脉冲电容器相连,利用独立的触发开关控制电路中电容器的放电。驱动线圈625中流过的瞬变电流会在内膛感生出瞬变磁场,进而在发射电枢66的表面以及内部感生出涡流,由于涡流在变化的磁场中受到洛伦兹力的作用,发射66电枢获得向前的加速度,推动负载8进行加速。
135.发射时,驱动线圈625将受到很大的径向向外的电磁力,为了约束驱动线圈625防止径向变形,需要在驱动线圈625外使用刚度、强度较高的加强骨架进行固定。为了减少感应涡流,加强骨架采用的是镂空骨架型结构,并分割为两个半圆形的第一紧固钢骨622和第二紧固钢骨624,且第一紧固钢骨622和第二紧固钢骨624通过螺栓组件626进行紧固连接。
136.所述加强骨架包括:前绝缘挡圈621、后绝缘挡圈623、第二紧固钢骨624和螺栓组件626;所述第一紧固钢骨622和第二紧固钢骨624之间通过螺栓组件626紧固连接,并拼合为环形钢骨;环形钢骨的两端分别固定安装前绝缘挡圈621和后绝缘挡圈623。进一步地,前连接法兰13 和前绝缘挡圈621通过第一螺栓与环形钢骨进行连接,后连接法兰和后绝缘挡圈623通过第二螺栓与环形钢骨进行连接。
137.具体地,所述前绝缘挡圈621和后绝缘挡圈623用于对加速段62的两端进行定位。进一步地,前绝缘挡圈621、后绝缘挡圈623由绝缘材料制成,以阻断加强骨架上产生的感应涡流传导到电磁发射装置上的其他金属结构中。
138.具体地,所述第一紧固钢骨622和第二紧固钢骨624之间设置绝缘垫板628,防止爬电。
139.进一步地,所述螺栓组件626包括:螺栓、螺母、第一绝缘套和第二绝缘套;所述螺栓依次穿过第一紧固钢骨622、第二紧固钢骨624和绝缘垫板628与螺母紧固连接;所述螺栓的螺栓头的外部罩设第一绝缘套;所述螺母的外部罩设第二绝缘套。通过设置绝缘套,能够阻断第一紧固钢骨622和第二紧固钢骨624之间的电传导,有效减少涡流损耗。
140.具体地,定位筒64设置在加速段62的尾部,作用是限制载荷装填的初始位置。定位筒64采用非金属材料制成,定位筒64与后绝缘挡圈 623之间通过螺纹连接,且装配时用螺纹胶加固,以保证初始轴向定位准确。具体地,所述定位筒64与所述发射电枢66并列设置,
且所述定位筒64与所述加强骨架固定连接。
141.具体地,到位传感器65主要用于检测载荷是否装填到位,保证发射的安全性。如图12所示,负载7、定位筒64和发射电枢66并列设置在驱动线圈625的内部。所述定位筒64与所述发射电枢66接触的一端设置到位传感器65;所述到位传感器65用于监测所述负载8是否装载到位。当负载8 装载到位时,负载8与发射电枢66的一端接触,到位传感器65与发射电枢 66的另一端接触。
142.如图14所示,所述发射电枢66包括:电枢外筒661、电枢衬套662 和电枢挡圈663;所述电枢衬套662和电枢挡圈663并列设置在所述电枢外筒661内部。具体地,所述电枢衬套662的强度大于所述电枢外筒661,用于保证发射电枢66的强度和刚度。所述电枢外筒661的导电率大于所述电枢衬套662;用于保证发射电枢66的电磁感应,使其能够在驱动线圈625的电磁力驱动下快速运动。
143.具体地,所述电枢挡圈663与所述电枢外筒661固定连接。电枢外筒661的内侧设置环形凸台,所述环形凸台用于限制所述电枢衬套662 的轴向位置,所述电枢挡圈663将电枢衬套662卡紧在所述环形凸台和电枢挡圈663之间。
144.后坐段63:
145.本发明的一种具体实施方式中,所述电磁发射装置还包括:后坐段63。如图15所示,所述后坐段63上设置后坐连接板632和后支承 631。具体地,加速段62与后坐段63通过法兰连接;后支承631为凸出于后坐段63主体结构的平板结构,后支承631搭接在导轨57上,后支承631用于支承整个电磁发射装置,并随动电磁发射装置的后坐运动相对于导轨57滑移。后坐段63采用金属材料制作,周向布置有加强筋,增加结构强度。
146.具体地,后坐连接板632用于将本发明的电磁发射装置与反后坐装置59固定连接。后坐连接板632与反后坐装置的连接方式包括:螺栓连接、焊接、粘接等。
147.本发明的一种具体实施方式中,探测装置58利用摄像头探测目标(火源)。具体地,利用发射转塔转动探测装置,使目标出现在变焦可见光摄像头的视野中。激光测距机连续多次进行激光测距,将5次测量的距离去除最大值和最小值后,对处于中间值的3个数据进行平均,并将该平均值作为目标斜距,从而探测装置完成对目标的搜索和测量。
148.与现有技术相比,本实施例提供的技术方案至少具有如下有益效果之一:
149.1.本发明的发射电枢66采用分体式电枢,所述电枢衬套662的强度大于所述电枢外筒661,用于保证发射电枢66的强度和刚度。所述电枢外筒661的导电率大于所述电枢衬套662;用于保证发射电枢66的电磁感应,使其能够在驱动线圈625的电磁力驱动下快速运动。既保证了电枢的结构强度有保证了电枢的电磁感应效果,进而能够提供负载更大的初始速度,实现远距离发射。
150.2.本发明在电磁发射器6的外部设置前支承611和后支承631,并通过两个支承与发射转塔上的导轨57配合,实现发射时的后坐滑移,并通过反后坐装置59消除后坐力。
151.3.本发明的电磁发射系统的发射方法,电磁发射器6搭载在发射转塔上,发射转塔那个实现方位旋转和俯仰角度的调整,实现对目标位置的持续跟踪,进而确保对负载7的精准发射,实现精准作业(灭火、消防或爆破)。
152.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,
都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。