1.本发明涉及二维的控制或者航道控制领域,具体涉及一种远程遥控无人舰艇航向容错控制系统。
背景技术:
2.无人舰艇是一种无人操作的舰艇,主要有无人水面舰艇和无人潜航器两种,主要用于执行危险以及不适于有人船只执行的任务,无人舰艇有望在未来10年内彻底变革海军的军事行动和战争,无人舰艇通常通过无线指挥系统对其进行控制,由于在航行过程中存在海浪的干扰,需要对无人舰艇进行调整,如何在调整过程中降低调整频次,同时保证在容错范围内航行时控制系统需要解决的问题。
3.背景技术的前述论述仅意图便于理解本发明。此论述并不认可或承认提及的材料中的任一种公共常识的一部分。
4.现在已经开发出了很多控制系统,经过我们大量的检索与参考,发现现有的控制系统有如公开号为cn112925324b所公开的系统,这些系统一般包括远程控制单元,用于发出远程控制信号,所述远程控制单元包括遥控器、网络移动终端,所述遥控器包括预定巡航路线选择开关;信息处理单元,所述信息处理单元与遥控器、网络移动终端信号连通,用于接收所述遥控器、网络移动终端发出的远程控制信号并进行处理并生成执行控制信号;执行单元,用于接收所述信息处理单元发出的执行控制信号或遥控器所发出的远程控制信号,并根据所述接收的控制信号控制舰艇的移动。但该系统并未考虑到航行过程中海浪对原有航线的影响,仅仅是对无人舰艇作出基础的控制,控制频率较高,容易被捕捉信号。
技术实现要素:
5.本发明的目的在于,针对所存在的不足,提出了一种远程遥控无人舰艇航向容错控制系统及方法。
6.本发明采用如下技术方案:
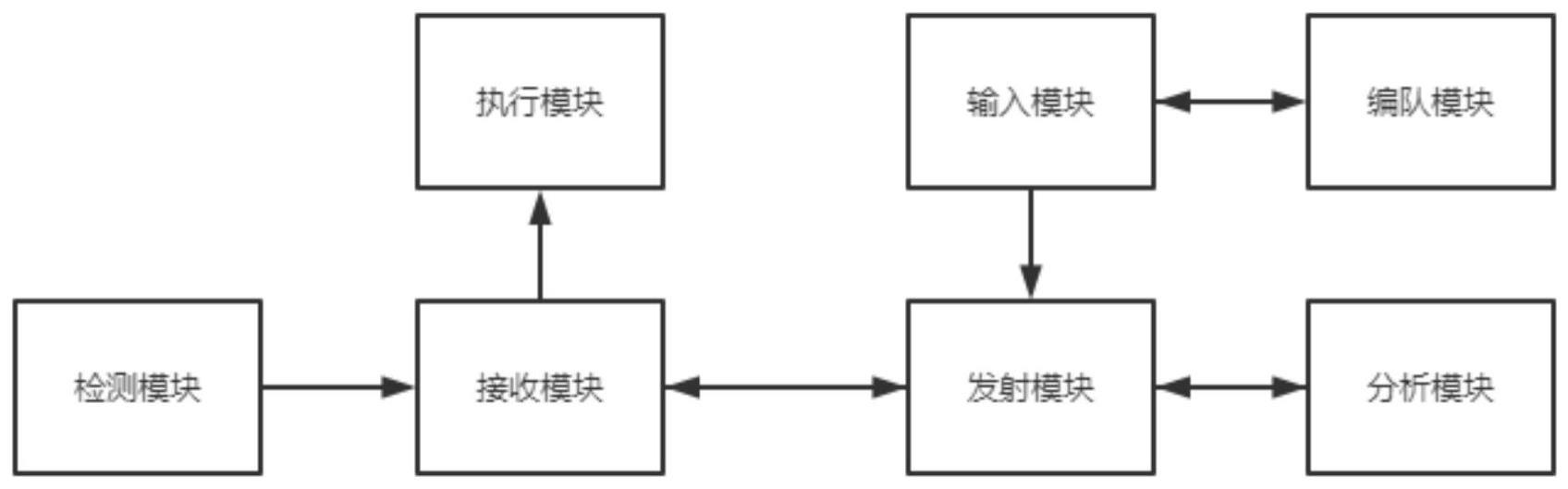
7.一种远程遥控无人舰艇航向容错控制系统,包括执行模块、接收模块、检测模块、发射模块、分析模块、输入模块和编队模块;
8.所述执行模块、所述接收模块和所述检测模块安装于无人舰艇,所述接收模块用于接收指令信息,所述执行模块根据指令信息对无人舰艇的转向进行控制,所述检测模块用于检测无人舰艇的航行状态信息;
9.所述发射模块、所述分析模块、所述输入模块和所述编队模块安装于指挥控制中心,所述发射模块用于发射指令信息,所述输入模块用于输入目标信息,所述分析模块基于所述目标信息和无人舰艇的航行状态计算得到指令参数,所述编队模块用于记录无人舰艇的通讯身份信息;
10.所述分析模块设置容错区域,根据无人舰艇的实时航行状态数据计算出横移率和偏角率,所述分析模块基于横移率、偏角率计算出无人舰艇的容错指数,当容错指数小于阈
值时,所述分析模块再计算出转向角,所述执行模块基于所述转向角对无人舰艇进行航向调整;
11.进一步的,所述检测模块检测的航行状态信息包括无人舰艇的坐标、无人舰艇的实时航向角度、无人舰艇的航速;
12.进一步的,所述分析模块包括数据存储单元和计算处理单元,所述存储单元用于保存接收的检测信息,所述计算处理单元用于执行计算任务;
13.进一步的,所述容错指数pw的计算公式为:
[0014][0015]
其中,t
now
表示当前时刻,l表示无人舰艇与目标地点之间的距离,v为无人舰艇的航速,dft为容错距离,d(t
now
)为当前时刻无人舰艇与容错区域航道轴线的距离,θ(t
now
)为当前时刻无人舰艇航向与容错区域航道轴线的夹角,α为横移率,β为偏角率;
[0016]
进一步的,所述横移率α的计算公式为:
[0017][0018]
所述偏角率β的计算公式为:
[0019][0020]
其中,[t1,t2]为横移率和偏角率对应的时间段,θ(t)表示无人舰艇与航道轴线夹角与时间的函数关系;
[0021]
一种远程遥控无人舰艇航向容错控制方法,包括如下步骤:
[0022]
s101、无人舰艇实时上传航行数据;
[0023]
s102、根据航行数据计算出横移率和偏角率;
[0024]
s103、计算出容错指数;
[0025]
s104、根据容错指数判断是否需要调整航向,若是,则计算出调转向角,若否,则跳回步骤s102;
[0026]
s105、根据转向角调整航向,清空航行数据后跳回步骤s102。
[0027]
本发明所取得的有益效果是:
[0028]
本系统根据起始地点和目标地点设置了一个容错区域,基于容错区域对航行过程中无人舰艇所在的位置进行容错判断,当容错指数小于阈值时再进行航向调整,大大降低了调整频次,同时,本系统还针对每个时段计算出横移率和偏角率,基于这两个参数计算容错指数,使容错指数能更好地反映出在海浪影响下的偏差,降低了后续需要调整的次数。
[0029]
为使能更进一步了解本发明的特征及技术内容,请参阅以下有关本发明的详细说明与附图,然而所提供的附图仅用于提供参考与说明,并非用来对本发明加以限制。
附图说明
[0030]
图1为本发明整体结构框架示意图;
[0031]
图2为本发明初始控制流程示意图;
[0032]
图3为本发明容错区域示意图;
[0033]
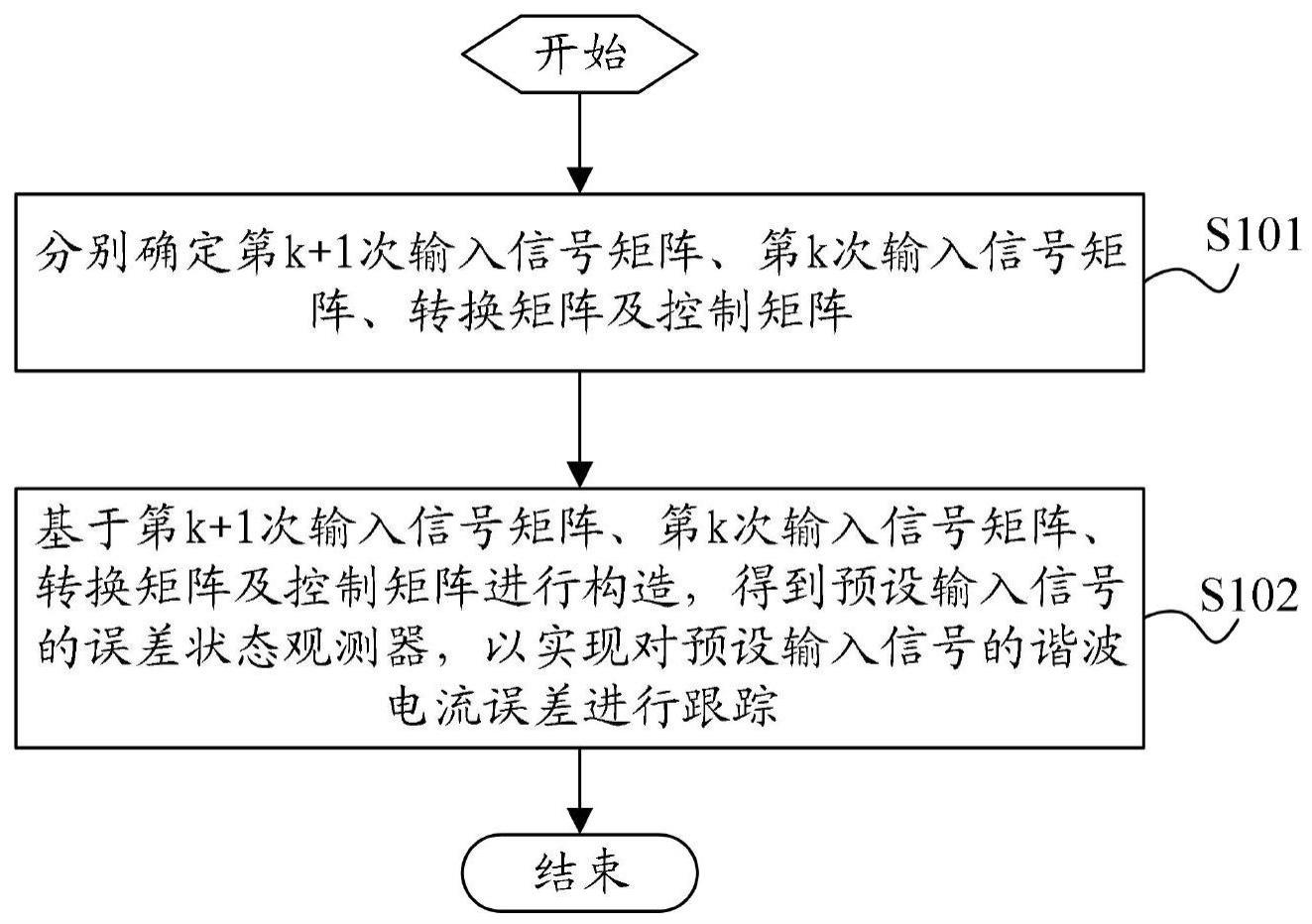
图4为本发明航向容错控制方法流程示意图;
[0034]
图5为本发明分析模块构成示意图。
具体实施方式
[0035]
以下是通过特定的具体实施例来说明本发明的实施方式,本领域技术人员可由本说明书所公开的内容了解本发明的优点与效果。本发明可通过其他不同的具体实施例加以施行或应用,本说明书中的各项细节也可基于不同观点与应用,在不悖离本发明的精神下进行各种修饰与变更。另外,本发明的附图仅为简单示意说明,并非依实际尺寸的描绘,事先声明。以下的实施方式将进一步详细说明本发明的相关技术内容,但所公开的内容并非用以限制本发明的保护范围。
[0036]
实施例一。
[0037]
本实施例提供了一种远程遥控无人舰艇航向容错控制系统,结合图1,包括执行模块、接收模块、检测模块、发射模块、分析模块、输入模块和编队模块;
[0038]
所述执行模块、所述接收模块和所述检测模块安装于无人舰艇,所述接收模块用于接收指令信息,所述执行模块根据指令信息对无人舰艇的转向进行控制,所述检测模块用于检测无人舰艇的航行状态信息;
[0039]
所述发射模块、所述分析模块、所述输入模块和所述编队模块安装于指挥控制中心,所述发射模块用于发射指令信息,所述输入模块用于输入目标信息,所述分析模块基于所述目标信息和无人舰艇的航行状态计算得到指令参数,所述编队模块用于记录无人舰艇的通讯身份信息;
[0040]
所述分析模块设置容错区域,根据无人舰艇的实时航行状态数据计算出横移率和偏角率,所述分析模块基于横移率、偏角率计算出无人舰艇的容错指数,当容错指数小于阈值时,所述分析模块再计算出转向角,所述执行模块基于所述转向角对无人舰艇进行航向调整;
[0041]
所述检测模块检测的航行状态信息包括无人舰艇的坐标、无人舰艇的实时航向角度、无人舰艇的航速;
[0042]
所述分析模块包括数据存储单元和计算处理单元,所述存储单元用于保存接收的检测信息,所述计算处理单元用于执行计算任务;
[0043]
所述容错指数pw的计算公式为:
[0044][0045]
其中,t
now
表示当前时刻,l表示无人舰艇与目标地点之间的距离,v为无人舰艇的航速,dft为容错距离,d(t
now
)为当前时刻无人舰艇与容错区域航道轴线的距离,θ(t
now
)为
当前时刻无人舰艇航向与容错区域航道轴线的夹角,α为横移率,β为偏角率;
[0046]
所述横移率α的计算公式为:
[0047][0048]
所述偏角率β的计算公式为:
[0049][0050]
其中,[t1,t2]为横移率和偏角率对应的时间段,θ(t)表示无人舰艇与航道轴线夹角与时间的函数关系;
[0051]
结合图4,一种远程遥控无人舰艇航向容错控制方法,包括如下步骤:
[0052]
s101、无人舰艇实时上传航行数据;
[0053]
s102、根据航行数据计算出横移率和偏角率;
[0054]
s103、计算出容错指数;
[0055]
s104、根据容错指数判断是否需要调整航向,若是,则计算出调转向角,若否,则跳回步骤s102;
[0056]
s105、根据转向角调整航向,清空航行数据后跳回步骤s102。
[0057]
实施例二。
[0058]
本实施例包含了实施例一中的全部内容,提供了一种远程遥控无人舰艇航向容错控制系统,包括执行模块、接收模块、检测模块、发射模块、分析模块、输入模块和编队模块;
[0059]
所述执行模块、所述接收模块和所述检测模块安装于无人舰艇,所述接收模块用于接收指令信息,所述执行模块根据指令信息对无人舰艇的转向进行控制,所述检测模块用于检测无人舰艇的航行状态信息;
[0060]
所述发射模块、所述分析模块、所述输入模块和所述编队模块安装于指挥控制中心,所述发射模块用于发射指令信息,所述输入模块用于输入目标信息,所述分析模块基于所述目标信息和无人舰艇的航行状态计算得到指令参数,所述编队模块用于记录无人舰艇的通讯身份信息;
[0061]
所述检测模块检测的航行状态信息包括无人舰艇的坐标、无人舰艇的实时航向角度、无人舰艇的航速,所述航行状态信息通过所述接收模块反馈给所述发射模块;
[0062]
所述发射模块和所述接收模块均具有接收信息和发送信息的功能;
[0063]
所述编队模块包括舰艇信息表和转换单元,所述舰艇信息表中记录了每个无人舰艇的通用id和通讯id,所述转换单元能够基于所述舰艇信息表将通用id转换为通讯id进行输出;
[0064]
所述输入模块输入的目标信息包含无人舰艇的通用id和对应的目标地点坐标;
[0065]
结合图2,所述系统对无人舰艇的控制包括初始控制和容错控制,所述初始控制的过程包括如下步骤:
[0066]
s1、通过所述输入模块输入目标信息;
[0067]
s2、所述输入模块将目标信息中的通用id按照顺序发送给所述编队模块;
[0068]
s3、所述编队模块将通用id转换为通讯id后反馈给所述输入模块;
[0069]
s4、所述输入模块将含有通讯id的目标信息发送给所述发射模块;
[0070]
s5、所述发射模块根据通讯id向对应的无人舰艇发送激活信息;
[0071]
s6、无人舰艇接收到激活信息后检测出无人舰艇的坐标和航向角度,并反馈给所述发射模块;
[0072]
s7、所述发射模块将无人舰艇坐标、航向角度和目标地点坐标发送给所述分析模块;
[0073]
s8、所述分析模块计算出转向角度,并通过所述发射模块将转向角度发送给对应的无人舰艇;
[0074]
s9、无人舰艇的执行模块基于转向角度对无人舰艇进行转向操作,然后朝目标地点航行;
[0075]
所述容错控制的过程包括如下步骤:
[0076]
s21、结合图3,所述分析模块基于无人舰艇的起始坐标和目标地点坐标设置容错区域,所述容错区域为一个长方形区域,所述起始坐标和所述目标地点坐标位于长方形区域中较短的两条边的中心位置,所述长方形区域的较长边的长度称为任务距离,所述长方形区域的较短边的长度的一半称为容错距离,所述容错距离dft与任务距离lam的关系为:
[0077]
dft=d0 λ
·
lglam;
[0078]
其中,d0表示基础距离,λ为容错系数;
[0079]
s22、所述检测模块将检测的数据实时上传至指挥控制中心;
[0080]
s23、所述分析模块根据上传的数据计算得到海浪影响因子,所述海浪影响因子包括横移率和偏角率;
[0081]
s24、所述分析模块根据无人舰艇在容错区域中的位置以及横移律和偏角率计算出容错指数;
[0082]
s25、当所述容错指数小于阈值时,所述分析模块计算出转向角,并将所述转向角发送至无人舰艇;
[0083]
s26、无人舰艇的执行模块基于转向角对无人舰艇进行转向操作;
[0084]
s27、不断重复步骤s22至步骤s27,直至无人舰艇到达目标地点;
[0085]
所述横移率α的计算公式为:
[0086][0087]
其中,[t1,t2]为横移率对应的时间段,d(t1)表示无人舰艇在t1时刻与航道轴线的距离,d(t2)表示无人舰艇在t2时刻与航道轴线的距离,所述航道轴线为起始坐标与目标地点坐标的连线,v为无人舰艇的航速,θ(t)表示无人舰艇与航道轴线夹角与时间的函数关系;
[0088]
所述偏角率β的计算公式为:
[0089]
[0090]
所述容错指数pw的计算公式为:
[0091][0092]
其中,t
now
表示当前时刻,l表示无人舰艇与目标地点之间的距离;
[0093]
步骤s25中转向角δθ的计算公式为:
[0094][0095]
当无人舰艇进行转向操作后,所述分析模块对用于计算横移率和偏角率的时间t1进行更新,而时间t2则取值为t
now
;
[0096]
结合图5,所述分析模块包括数据存储单元和计算处理单元,所述存储单元用于保存t1时间及之后接收的检测信息,当t1时间更新后,所述存储单元清空保存内容并重新存储检测信息,所述计算处理单元用于执行计算任务。
[0097]
以上所公开的内容仅为本发明的优选可行实施例,并非因此局限本发明的保护范围,所以凡是运用本发明说明书及附图内容所做的等效技术变化,均包含于本发明的保护范围内,此外,随着技术发展其中的元素可以更新的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。