踏板装置
1.对于相关申请的相互参照
2.本技术基于2021年2月25日提出申请的日本专利申请号2021-29097号,通过参照将其记载内容编入于此。
技术领域
3.本公开涉及设于车辆的风琴式的踏板装置。
背景技术:
4.以往已知有风琴式的踏板装置。风琴式的踏板装置是指该踏板装置所具有的踏板垫中的被驾驶员踩踏的部位配置于比作为踏板垫的旋转中心的踏板轴心靠车辆上方的构成。该风琴式的踏板装置在车辆中例如被用作加速踏板装置或者制动踏板装置等。
5.专利文献1所记载的风琴式的踏板装置具备外壳、相对于外壳以踏板轴心为中心进行旋转动作的踏板垫、及将踏板垫连结于设于外壳内的反作用力机构的连接构件。
6.而且,踏板垫具备形成向车辆中的斜上下方向延伸的板形状的板部与能够旋转地连结于外壳的连结部。该连结部被设为从板部的板形状所具有的车辆下方的端面局部突出。另外,专利文献1的踏板装置中的踏板轴心在板部的板形状的板厚方向上设于与该板形状的厚度中心一致的位置。
7.现有技术文献
8.专利文献
9.专利文献1:美国专利申请公开第2018/0253120a1号说明书
技术实现要素:
10.在风琴式的踏板装置中,为了将踏板垫能够旋转地连结于外壳,例如将踏板垫经由踏板轴连结于外壳。在该情况下,踏板轴伴随着驾驶员对于踏板垫的踩踏操作而受到该驾驶员的踏力,因此需要具有足够的刚性。
11.然而,在专利文献1的踏板装置中,为了充分地确保踏板轴的刚性,例如欲使踏板轴的直径为足够的大小的话,则会在相对于踏板垫的驾驶员侧形成局部的突出形状。即,在该情况下,可干扰踩踏踏板垫驾驶员的脚的干扰物形成于相对于踏板垫的驾驶员侧,因此踏板装置的操作性降低。发明人们详细研究的结果是发现了以上情况。
12.本公开鉴于上述内容,目的在于在风琴式的踏板装置中适当地确保该踏板装置的操作性并且提高踏板轴的刚性。
13.为了实现上述目的,根据本公开的一个观点,踏板装置是设于车辆的风琴式的踏板装置,具备:
14.踏板垫,包含板部,该板部呈在板厚方向上具有厚度且向延伸方向延伸的板形状,所述踏板垫由驾驶员从板厚方向的一侧对板部进行踩踏操作而绕与延伸方向垂直的轴心进行旋转动作;
15.以轴心为中心向该轴心的轴向延伸的踏板轴;以及
16.支承体,经由踏板轴将踏板垫支承为能够绕轴心旋转,
17.轴心相对于板部的板形状的厚度中心向板厚方向的与一侧相反的一侧的另一侧偏移地设置,
18.在驾驶员未对板部进行踩踏操作的非踩踏状态下,延伸方向的一侧比另一侧靠车辆下方,
19.板部的板形状比踏板轴向延伸方向的一侧延伸。
20.由此,与专利文献1的踏板装置的构成比较,能够增大踏板轴的直径而不会在相对于踏板垫的驾驶员侧形成干扰物。因而,能够适当地确保踏板装置的操作性,并且提高踏板轴的刚性。
21.另外,踏板垫所具有的板部的板形状比踏板轴向延伸方向的一侧延伸,因此能够利用踏板垫保护踏板轴及该踏板轴周围的部分不受踩踏踏板垫的驾驶员的脚的影响。
22.此外,对各构成要素等标注的带括号的参照标记表示该构成要素等和后述的实施方式所记载的具体构成要素等的对应关系的一例。
附图说明
23.图1是表示在第一实施方式中搭载踏板装置的车辆的示意图。
24.图2是表示使用第一实施方式的踏板装置的线控制动系统的概略构成的图。
25.图3是表示第一实施方式的踏板装置的立体图。
26.图4是以踏板垫处于最小旋转位置的状态示出第一实施方式的踏板装置的侧视图。
27.图5是以踏板垫处于最大旋转位置的状态示出第一实施方式的踏板装置的侧视图。
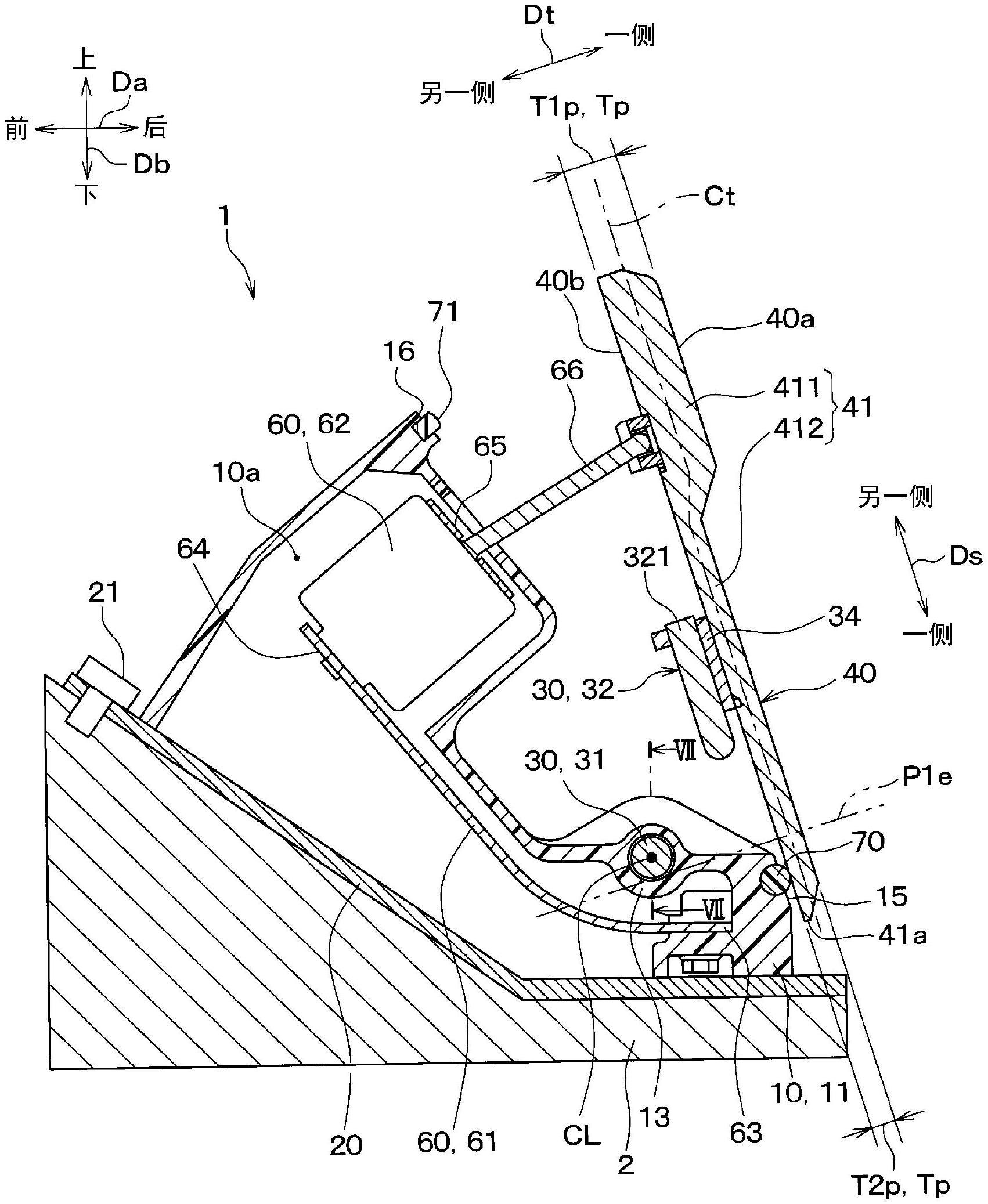
28.图6是表示第一实施方式中的踏板装置的与踏板轴心垂直的剖面的剖面图。
29.图7是图4以及图6的vii-vii线的剖面图。
30.图8是示意地表示第二实施方式的踏板装置的图。
31.图9是在第二实施方式中放大表示图8的ix部分并且选取踏板垫与踏板轴而表示的局部放大图。
32.图10是图9的x-x线的剖面图。
33.图11是示意地表示第二实施方式中的踏板垫的部件单体中的连结于踏板轴的部分的立体图。
34.图12是在第三实施方式中放大表示相当于图8的ix部分的部分并且选取踏板垫与踏板轴而表示的局部放大图,并且是相当于图9的图。
35.图13是在第四实施方式中放大表示相当于图8的ix部分的部分并且选取踏板垫、踏板轴及连结部件而表示的局部放大图,并且是相当于图9的图。
36.图14是图13的xiv-xiv线的剖面图。
37.图15是表示第五实施方式中的相当于图9的x-x线的剖面的剖面的剖面图,并且是相当于图10的图。
38.图16是示意地表示第五实施方式中的踏板垫的部件单体中的连结于踏板轴的部
分的立体图,并且是相当于图11的图。
39.图17是示意地表示第六实施方式的踏板装置的图,并且是相当于图8的图。
40.图18是简化表示图17的xviii-xviii线的剖面的剖面图。
41.图19是第六实施方式的踏板装置所具备的传感器单元的剖面图。
42.图20是图19的xx-xx线的剖面图。
43.图21是第七实施方式的踏板装置所具备的传感器单元的剖面图。
44.图22是图21的xxii-xxii线的剖面图。
45.图23是第八实施方式的踏板装置所具备的传感器单元的剖面图。
46.图24是图23的xxiv-xxiv线的剖面图。
47.图25是第九实施方式的踏板装置所具备的传感器单元的剖面图。
48.图26是图25的xxvi-xxvi线的剖面图。
49.图27是第十实施方式的踏板装置所具备的传感器单元的剖面图。
50.图28是图27的xxviii-xxviii线的剖面图。
51.图29是第十一实施方式的踏板装置所具备的传感器单元的剖面图。
52.图30是图29的xxx-xxx线的剖面图。
53.图31是表示第十二实施方式的踏板装置所具备的传感器单元及其附近的剖面图。
54.图32是表示第十三实施方式的踏板装置所具备的传感器单元及其附近的剖面图。
55.图33是表示第十四实施方式的踏板装置所具备的轴及其附近的剖面图。
56.图34是表示第十五实施方式的踏板装置所具备的踏板轴及其附近的剖面图。
57.图35是表示第十六实施方式的踏板装置所具备的踏板轴及其附近的剖面图。
58.图36是第十七实施方式的踏板装置的侧视图,并且是相当于图4的图。
59.图37是第十八实施方式中,图8相同的方向观察时选取踏板垫与踏板轴来表示的示意图。
60.图38是在第十九实施方式中选取踏板垫与踏板轴而表示的示意图,并且相当于图37的图。
具体实施方式
61.以下,一边参照附图,一边对各实施方式进行说明。另外,在以下的各实施方式彼此中,对于彼此相同或等同的部分在图中标注相同的附图标记。
62.(第一实施方式)
63.如图1所示,本实施方式的踏板装置1是搭载于车辆80的装置,通过车辆80的乘员即驾驶员81的踏力进行踩踏操作。该踏板装置1作为用于进行对车辆80进行制动的制动操作的制动踏板装置设于车辆80。
64.另外,图1的两端箭头分别表示踏板装置1所搭载的车辆80的朝向。即,在图1中,用两端箭头分别表示车辆80的前后方向即车辆前后方向da与车辆80的上下方向(换言之是车辆80的顶底方向)即车辆上下方向db。另外,在本实施方式的说明中,车辆前后方向da上的前方也被称为车辆前方,车辆前后方向da上的后方也被称为车辆后方,车辆上下方向db上的上方也被称为车辆上方,车辆上下方向db上的下方也被称为车辆下方。
65.在本实施方式的车辆80中,详细来说采用了线控制动系统84,踏板装置1是使用于
该线控制动系统84的制动踏板装置。
66.线控制动系统84例如是以图2所示的构成驱动轮缸871~874的系统。即,线控制动系统84是基于从踏板装置1的传感器单元50输出的电信号、通过电子控制装置85的驱动控制使制动回路86产生车辆80的制动所需的液压而驱动轮缸871~874的系统。另外,图2的电子控制装置85搭载于车辆80,在本实施方式的说明中也称为ecu85。
67.在图2例示的线控制动系统84中,ecu85包括第一ecu851与第二ecu852。另外,制动回路86包括第一制动回路861与第二制动回路862。
68.从踏板装置1的传感器单元50输出的电信号向第一ecu851与第二ecu852传送。第一ecu851具有未图示的微机以及驱动电路等。第一ecu851向第一制动回路861所具有的马达863等供给电力,对第一制动回路861进行驱动控制。另外,第二ecu852也具有未图示的微机以及驱动电路等。第二ecu852对第二制动回路862所具有的未图示的电磁阀、马达等进行驱动控制。
69.第一制动回路861具有储存器864、马达863、齿轮机构865以及主缸866等。储存器864储存制动液。马达863驱动齿轮机构865。齿轮机构865使主缸866所具有的主活塞867在主缸866的轴向上往复移动。通过主活塞867的移动,从储存器864供给到主缸866的制动液的液压增加,该液压从第一制动回路861向第二制动回路862供给。
70.第二制动回路862是根据来自第二ecu852的控制信号控制各轮缸871~874的液压、从而进行通常控制、侧滑防止控制等中所使用的液压回路。各轮缸871~874分别配置于车辆80的各车轮,驱动设于各个车轮的制动衬块。另外,第二ecu852除了上述的通常控制以及侧滑防止控制之外,也可以还基于来自未图示的其他ecu的信号进行碰撞避免控制以及再生协调控制等。
71.若乘坐于车辆80的驾驶员81对踏板装置1的踏板垫40进行踩踏操作,则该踏板垫40进行旋转动作,与踏板垫40的旋转角度相应的信号从传感器单元50向第一ecu851与第二ecu852输出。第一ecu851为了使车辆80减速而驱动马达863。由此,若马达863的转速变大,则主缸866使从储存器864供给的制动液的压力增加。该制动液的液压从第一制动回路861传向第二制动回路862。
72.第二ecu852执行通常控制以及侧滑防止控制等各种制动控制。例如第二ecu852在进行与驾驶员81对踏板垫40的操作相应的制动的通常控制中,控制第二制动回路862所具有的各电磁阀等的驱动。而且,在该通常控制中,第二ecu852使得从第一制动回路861供给的液压经由第二制动回路862向各轮缸871~874供给。由此,由各轮缸871~874驱动的制动垫片和与其对应的制动盘摩擦接触,使各车轮制动而使车辆80减速。
73.如图3~图6所示,踏板装置1具备外壳10、底板20、轴30、踏板垫40、传感器单元50、反作用力产生机构60以及连结杆66等。踏板装置1是风琴式的踏板装置。
74.该风琴式的踏板装置1是指踏板垫40中的被驾驶员81踩踏的部位相对于踏板垫40的旋转中心cl配置于车辆上方(换言之是车辆搭载时的上下方向上的上方)的构成。而且,在风琴式的踏板装置1中,随着施加于踏板垫40的驾驶员81的踏力的增加,踏板垫40中的比旋转中心cl靠车辆上方的部位向车厢内的地板2侧或者前围板侧进行旋转动作。
75.另外,在本实施方式的说明中,也将该踏板垫40的旋转中心cl称为踏板轴心cl。另外,图7所示的踏板轴心cl的轴向dpa也被称为踏板轴心方向dpa,踏板轴心cl的径向dpr也
被称为踏板轴心径向dpr。
76.如图3~图6所示,外壳10具有外壳主体11与外壳罩12。外壳10是支承踏板垫40等的支承体,经由底板20安装于车身的一部分。即,外壳10是固定于车身且不旋转的非旋转部件。详细地说,外壳10中的外壳主体11经由底板20安装于构成车身的一部分的车厢内的地板2或者前围板等。另外,前围板是划分车辆80的发动机室等车厢外与车厢内的隔壁,也有时称为横隔板。
77.如图7所示,外壳主体11具有用于可旋转地支承轴30的旋转轴支承部13。
78.另外,如图6以及图7所示,在外壳主体11的内侧形成有设置传感器单元50以及反作用力产生机构60等的空间10a即外壳空间10a。如图3以及图7所示,外壳罩12设于外壳主体11的侧面,将形成于该外壳主体11的侧面的外壳空间10a的开口部分10b封堵。
79.如图3~图6所示,底板20设于外壳10中的与踏板垫40相反的一侧的面。底板20从外壳10中的车辆前方侧的部位连续地延伸到车辆后方侧的部位。而且,底板20通过螺栓21等固定于车辆80的地板2或者前围板。底板20例如由金属等强度比外壳主体11高的材料构成。因此,底板20具有提高外壳10的刚性(例如后述的旋转轴支承部13及其周围的刚性)的功能。
80.如图3、图4、图7所示,轴30是旋转轴部件,例如形成为将圆柱状的金属制的棒材弯折多次的形状。轴30具有轴部31、固定部32及连结部33。
81.轴30的轴部31是以踏板轴心cl为中心向踏板轴心方向dpa延伸的踏板轴,并且是轴30中的配置于旋转轴支承部13的部位。固定部32是以不能旋转的方式固定于踏板垫40的部位。在本实施方式中,固定部32固定于设于踏板垫40中的与承受来自驾驶员81的踏力的面相反的一侧的面即踏板背面40b的固定件34。另外,轴30的连结部33是将轴部31与固定部32连结的部位。
82.通过这种轴30的构成,踏板垫40配置成无论处于该踏板垫40的可动范围内的任何旋转角度都不与外壳10的旋转轴支承部13接触,而是离开该旋转轴支承部13。
83.而且,轴30具有轴部31、固定部32及连结部33,从而将踏板轴心cl与踏板垫40配置于相互分离的位置,能够容易地在该踏板轴心cl周围的空间设置传感器单元50。
84.如图6以及图7所示,轴30能够旋转地支承于设于外壳主体11的旋转轴支承部13。详细地说,在该旋转轴支承部13的内侧形成以踏板轴心cl为中心向踏板轴心方向dpa延伸的旋转轴孔13a,在该旋转轴孔13a插入有轴30的轴部31。而且,在该旋转轴孔13a内设置圆筒状的轴承14,该轴承14配置于旋转轴支承部13与轴30的轴部31之间。通过这种构成,旋转轴支承部13经由轴承14将轴30的轴部31支承为能够旋转。
85.另外,轴30仅支承于设于外壳主体11的旋转轴支承部13,未支承于外壳罩12。例如即使轴30伴随着驾驶员81的踩踏操作绕踏板轴心cl旋转,也维持从外壳罩12隔开间隙地离开的状态。
86.踏板垫40具有形成在板厚方向dt上具有厚度且向延伸方向ds延伸的板形状的板部41,例如由金属或者树脂等构成。踏板垫40由驾驶员81从板厚方向dt的一侧对板部41进行踩踏操作,从而绕踏板轴心cl进行旋转动作。详细地说,外壳10经由轴30将踏板垫40支承为能够绕踏板轴心cl旋转。而且,踏板垫40固定于轴30的固定部32,因此踏板垫40与轴30伴随着驾驶员81的踩踏操作绕踏板轴心cl一体旋转。
87.另外,在本实施方式中,踏板轴心方向dpa、板部41的板厚方向dt、及延伸方向ds是相互交叉的方向,严格来说是相互垂直的方向。另外,在本实施方式的说明中,板部41的板厚方向dt也被称为踏板板厚方向dt,板部41的延伸方向ds也被称为踏板延伸方向ds。
88.踏板垫40在驾驶员81未对该踏板垫40进行踩踏操作的非踩踏状态下,相对于车辆前后方向da倾斜地配置。具体而言,踏板垫40以该踏板垫40上端部相对于下端部成为车辆前方并且车辆上方的方式倾斜地配置。即,在踏板垫40的非踩踏状态下,踏板延伸方向ds的一侧比踏板延伸方向ds的另一侧靠车辆下方,板部41的板形状延伸。另外,在本实施方式中,在后述的踏板垫40的最大踩踏状态下,踏板延伸方向ds的一侧也比踏板延伸方向ds的另一侧靠车辆下方。
89.另外,踏板垫40的板部41的厚度并非固定,板部41具有厚壁部411与相对于厚壁部411配置于踏板延伸方向ds的一侧的薄壁部412。该厚壁部411与薄壁部412相比厚度变大。在本实施方式中,踏板垫40的板部41中的朝向踏板板厚方向dt的一侧形成于厚壁部411的面作为在驾驶员81的踩踏操作时被驾驶员81踩踏的踏板垫40的踏面40a发挥功能。
90.另外,踏板垫40的板部41具有朝向踏板板厚方向dt的与一侧相反的一侧的另一侧的踏板背面40b。该踏板背面40b遍及踏板延伸方向ds上的板部41的全长而形成。另外,踏板垫40并不局限于图示的配置,例如也可以配置成在踏板垫40的非踩踏状态下板部41成为大致沿着车辆上下方向db的姿态。
91.这里,若说明踏板垫40的板部41与踏板轴心cl的位置关系,则如图6所示,踏板轴心cl相对于板部41的板形状的厚度中心ct向踏板板厚方向dt的另一侧偏移地设置。板部41的板形状的厚度tp即板形状厚度tp是该板形状在踏板板厚方向dt上具有的宽度,例如在本实施方式中,在厚壁部411与薄壁部412中不同。即,厚壁部411中的板形状厚度tp即厚度t1p比薄壁部412中的板形状厚度tp即厚度t2p大。
92.而且,板部41的板形状的厚度中心ct即板形状厚度中心ct由连接该板形状的各部中的板形状厚度tp的中心点而获得的线或者面表示。例如在图6中,该板形状厚度中心ct由在厚壁部411与薄壁部412之间弯曲的单点划线表示。即,踏板轴心cl相对于板形状厚度中心ct向踏板板厚方向dt的另一侧偏移地设置,换言之,踏板轴心cl相对于表示板形状厚度中心ct的单点划线向踏板板厚方向dt的另一侧偏移地设置。
93.另外,板部41的板形状比作为踏板轴的轴部31向踏板延伸方向ds的一侧延伸。换言之,板部41的板形状在踏板延伸方向ds的一侧具有板形状一端面41a,该板形状一端面41a配置于比轴部31中的踏板延伸方向ds的一侧的端位置p1e更靠踏板延伸方向ds的一侧。另外,在以下的说明中,也将轴部31中的踏板延伸方向ds的一侧的端位置p1e称为轴部31的一侧端位置p1e或者踏板轴的一侧端位置p1e。
94.另外,如图6所示,踏板垫40的板部41所具有的踏板背面40b换言之也是该板部41的板形状所具有的背面。而且,轴部31中的至少一部分设于比踏板背面40b中的位于踏板板厚方向dt的最靠一侧的部位更靠踏板板厚方向dt的另一侧。
95.例如假设踏板背面40b为凸凹,则踏板背面40b中的位于踏板板厚方向dt的最靠一侧的部位成为踏板背面40b的一部分,但在本实施方式中,踏板背面40b为与踏板板厚方向dt垂直的平面状。因此,在本实施方式中,踏板背面40b的整体相当于该踏板背面40b中的位于踏板板厚方向dt的最靠一侧的部位。另外,在本实施方式中,轴部31的全部而并非一部分
设于比踏板背面40b中的位于踏板板厚方向dt的最靠一侧的部位靠踏板板厚方向dt的另一侧。
96.如图4~图6所示,相对于踏板垫40固定有轴30的固定部32,但该固定部32具有向踏板延伸方向ds延伸的延伸部321。而且,详细地说,固定部32中的延伸部321利用固定件34在比踏板轴心cl靠踏板延伸方向ds的另一侧固定于踏板垫40的板部41。
97.另外,如图3以及图4所示,轴30的连结部33配置于轴部31与相对于该轴部31设于踏板板厚方向dt的一侧的固定部32之间。而且,连结部33以越靠近踏板板厚方向dt的一侧越位于踏板延伸方向ds的另一侧的方式相对于踏板板厚方向dt倾斜地延伸。
98.如图4以及图5所示,踏板垫40在小于旋转一周的受限的规定的旋转角度范围(换言之是可动范围)内进行旋转动作。即,踏板垫40伴随着驾驶员81的踩踏操作绕踏板轴心cl摆动。
99.踏板垫40的旋转动作中的上述旋转角度范围详细来说是从踏板垫40的最小旋转位置到最大旋转位置的范围。即,在踏板垫40的非踩踏状态下,踏板垫40的旋转角度处于最小旋转位置,在踏板垫40被驾驶员81最大程度踩踏的最大踩踏状态下,踏板垫40的旋转角度处于最大旋转位置。
100.另外,图3、图4、图6以踏板垫40的非踩踏状态、即未对踏板垫40施加驾驶员81的踏力的状态示出了踏板装置1。另一方面,图5以踏板垫40的最大踩踏状态、即对踏板垫40施加驾驶员81的踏力且踏板垫40抵接于全开止挡件71的状态示出了踏板装置1。
101.例如在上述的旋转角度范围内,踏板垫40以从踏板板厚方向dt的一侧对于该踏板垫40施加的驾驶员81的踏力越是增加、踏板垫40的上端部越向车辆前方并且车辆下方位移的方式进行旋转动作。总之,该驾驶员81的踏力越是增加,踏板垫40越从图4所示的姿态向图5所示的姿态进行旋转动作。相反,踏板垫40以从踏板板厚方向dt的一侧对于该踏板垫40施加的驾驶员81的踏力越是减少、踏板垫40的上端部越通过反作用力产生机构60的作用向车辆后方并且车辆上方位移的方式进行旋转动作。总之,该驾驶员81的踏力越是减少,踏板垫40越从图5所示的姿态向图4所示的姿态进行旋转动作。
102.在本实施方式中,踏板垫40的最小旋转位置由作为第一止挡件的全闭止挡件70规定,踏板垫40的最大旋转位置由作为第二止挡件的全开止挡件71规定。全闭止挡件70与全开止挡件71分别由树脂或者橡胶等构成。
103.全闭止挡件70设于外壳10中的位于比踏板轴心cl靠车辆后方的部位。具体而言,全闭止挡件70在外壳10中的位于车辆后方的部位埋入到朝向车辆后方及车辆斜上方的壁面15。全闭止挡件70在踏板垫40的非踩踏状态下与踏板背面40b中的下端部或者其附近接触,将踏板垫40保持在最小旋转位置。
104.全开止挡件71设于外壳10中的位于比踏板轴心cl靠车辆前方的部位。具体而言,全开止挡件71设于外壳10中的位于车辆前方的壁面的上端部。详细地说,全开止挡件71在位于外壳10中的车辆前方的部位埋入到朝向车辆后方及车辆斜上方的壁面16。全开止挡件71在踏板垫40的最大踩踏状态下与踏板背面40b中的上端部或者其附近接触,将踏板垫40保持在最大旋转位置。
105.如图6所示,在外壳10内设有产生相对于驾驶员81对踏板垫40施加的踏力而言的反作用力的反作用力产生机构60。踏板装置1具备反作用力产生机构60,从而即使取消了踏
板垫40与主缸866(参照图2)的机械连接,也能够获得和踏板垫40与主缸866机械连接的情况相同的反作用力。该踏板垫40与主缸866机械连接的情况换言之是可获得基于液压的反作用力的情况。
106.在本实施方式中,反作用力产生机构60例如包括板簧61与设于保持件62的内侧的未图示的一个或者多个螺旋弹簧等。通过用一个或者多个弹性部件构成反作用力产生机构60,能够形成与踏板垫40的旋转角度相应的规定的踏力特性。
107.板簧61在未承受载荷的状态下弯曲成向地板2侧凸出的曲面。板簧61的一端63配置于踏板轴心cl与底板20之间,固定于外壳10或者底板20。另一方面,在板簧61的另一端64固定有保持件62。板簧61配置成沿与踏板轴心cl垂直的虚拟平面挠曲。因此,板簧61若从保持件62侧承受载荷,则以固定该保持件62的另一端64侧的部位向底板20侧接近的方式挠曲。
108.保持件62形成为有底筒状。虽然省略图示,在保持件62的内侧设有一个或者多个螺旋弹簧等。在保持件62中的踏板垫40侧的端部设有盖部件65。盖部件65设置成能够随着设于保持件62的内侧的螺旋弹簧的伸缩而在保持件62的内侧往复移动。
109.盖部件65与踏板垫40利用连结杆66连接。连结杆66的一端与踏板垫40能够旋转地连接,连结杆66的另一端与盖部件65也能够旋转地连接。通过这种构成,若驾驶员81向踏板垫40施加踏力,踏板垫40向外壳10侧旋转,则从踏板垫40经由连结杆66向反作用力产生机构60的各部件施加载荷。因此,构成反作用力产生机构60的板簧61与螺旋弹簧产生相对于驾驶员81施加于踏板垫40的踏力而言的反作用力。另外,反作用力产生机构60以及连结杆66的构成不限于上述例示的构成,可以采用各种构成。
110.本实施方式的踏板装置1如上述那样是踏板垫40与轴30绕同一踏板轴心cl旋转的构成。因此,驾驶员81为了控制车辆行驶而进行了踩踏操作的踏板垫40的操作量(即,踏板垫40的旋转角度)与轴30的旋转角度相同。其踏板垫40以及轴30的旋转角度由设于踏板轴心cl上或者该踏板轴心cl的周围的传感器单元50直接检测。另外,在以下的说明中,将踏板垫40以及轴30的旋转角度称作“踏板旋转角”。
111.如图7所示,传感器单元50具有设于轴30的轴部31的转动部51与设于外壳主体11而输出与转动部51的相位相应的信号的信号输出部55。在本实施方式中,作为传感器单元50,采用了转动部51与信号输出部55能够非接触地检测踏板旋转角的非接触式的传感器。换言之,传感器单元50通过作为第一部分的转动部51与作为第二部分的信号输出部55伴随着踏板垫40的旋转而相互非接触地相对移动来检测踏板旋转角。
112.转动部51例如包含由磁体以及磁轭等形成为圆筒状的磁路52与保持该磁路52的保持部511等而构成。转动部51通过螺栓53等固定于轴30的端部(详细地说是轴部31的前端部),与轴30一同旋转。在本实施方式中,转动部51的旋转中心与踏板轴心cl相同。
113.而且,构成转动部51的磁路52形成磁通以与踏板轴心cl交叉的方式流过的磁场。因而,转动部51使信号输出部55周围的磁场伴随着踏板垫40的旋转而变化。
114.另一方面,信号输出部55包含一个或者多个霍尔ic56与对该霍尔ic56进行模制的传感器保持部57等而构成。霍尔ic56具有霍尔元件和进行该霍尔元件输出的信号的放大等的集成电路。霍尔ic56输出与通过霍尔元件的感磁面的磁通密度相应的电信号。即,霍尔ic56输出与信号输出部55周围的磁场相应的电信号。
115.例如若转动部51与轴30的轴部31一同绕踏板轴心cl旋转,则通过霍尔ic56所具有的霍尔元件的感磁面的磁通密度变化。因此,信号输出部55输出与踏板垫40以及轴30的旋转角度(即,踏板旋转角)相应的电信号。
116.传感器单元50的信号输出部55与外壳10具有能够将信号输出部55的传感器中心组装于规定的位置的定位构造。该规定的位置是信号输出部55的传感器中心的预先确定的位置,并且是能够检测以踏板轴心cl为中心旋转的转动部51的相位的位置。
117.另外,信号输出部55的传感器中心是指成为信号输出部55中的具有感测功能的部位的中心的位置。本实施方式的定位构造能够将信号输出部55的传感器中心与踏板轴心cl组装在同轴上。定位构造例如包括设于外壳10的凹部17与设于信号输出部55的凸部58。通过该凹部17与凸部58的嵌合,信号输出部55的传感器中心配置于踏板轴心cl上。
118.作为定位构造的一个例子,在本实施方式中,在外壳10中的与轴30的轴部31的一端侧对应的位置设有用于设置信号输出部55的开口部18。设于该外壳10的开口部18的内壁面相当于定位构造的凹部17。另一方面,在信号输出部55的传感器保持部57设有与设于外壳10的开口部18的内壁面嵌合的突起59。该突起59的外壁面(即,传感器保持部57的外壁面)相当于定位构造的凸部58。因而,通过使设于信号输出部55的传感器保持部57的突起59的外壁面与设于外壳10的开口部18的内壁面嵌合,将信号输出部55的传感器中心组装于规定的位置。具体而言,信号输出部55的传感器中心与踏板轴心cl组装在同轴上。另外,传感器单元50的构成以及定位构造的构成并不限于上述例示,如后述的各实施方式中所说明的那样,可以采用各种构成。
119.如图1、图4、图7所示,在上述的本实施方式的踏板装置1的构成中,若驾驶员81的踏力施加于踏板垫40,则踏板垫40与轴30绕踏板轴心cl进行旋转动作。详细地说,踏板垫40与轴30以踏板垫40中的比踏板轴心cl靠车辆上方的部位向地板2侧或者前围板侧移动的方式绕踏板轴心cl进行旋转动作。此时,传感器单元50利用设于外壳主体11的信号输出部55检测与轴30的轴部31一体旋转的转动部51的相位的变化。而且,信号输出部55将与踏板旋转角相应的电信号向车辆80的ecu85(参照图2)输出。ecu85对制动回路86进行驱动控制而产生车辆80的制动所需的液压(例如液压),用该液压驱动制动垫片而使车辆80减速或者停止。
120.以上说明的本实施方式的踏板装置1起到以下的作用效果。
121.根据本实施方式,如图6所示,在踏板装置1中,踏板轴心cl相对于板部41的板形状的厚度中心ct向踏板板厚方向dt的另一侧偏移地设置。由此,与专利文献1的踏板装置的构成比较,能够增大轴30的轴部31的直径而不会在相对于踏板垫40的驾驶员81侧形成干扰物。因而,能够适当地确保踏板装置1的操作性,并且提高包含该轴部31的轴30的刚性。
122.另外,在踏板垫40的非踩踏状态下,踏板延伸方向ds的一侧比另一侧靠车辆下方。而且,踏板垫40所具有的板部41的板形状比轴30的轴部31向踏板延伸方向ds的一侧延伸。因而,能够利用踏板垫40保护轴30的轴部31与该轴部31周围的部分(例如旋转轴支承部13以及轴承14等)不受踩踏踏板垫40的驾驶员81的脚的影响。
123.(1)另外,根据本实施方式,轴30的轴部31中的至少一部分设于比踏板背面40b中的位于踏板板厚方向dt的最靠一侧的部位靠踏板板厚方向dt的另一侧。由此也能够与专利文献1的踏板装置的构成比较增大轴30的轴部31的直径而不会在相对于踏板垫40的驾驶员
81侧形成干扰物。
124.(2)另外,根据本实施方式,如图4以及图7所示,轴30具有以踏板轴心cl为中心向踏板轴心方向dpa延伸的作为踏板轴的轴部31、不能旋转地固定于踏板垫40的固定部32、及连结部33。而且,该连结部33将轴部31与固定部32连结。
125.即,包含作为踏板轴的轴部31的轴30兼备将该轴部31与踏板垫40连结的功能。因而,即使该轴部31如本实施方式那样位于离开踏板背面40b而偏移的位置,也不需要将轴部31与踏板垫40连接的另一部件,就能够将轴部31与踏板垫40连结。其结果,能够实现部件数量的减少。
126.另外,由于能够将踏板垫40配置成离开踏板轴心cl(即,轴部31的中心),因此能够在该踏板轴心cl的周围的空间设置传感器单元50。而且,能够利用该传感器单元50直接检测踏板旋转角。
127.(3)另外,根据本实施方式,如图4所示,轴30的固定部32具有向踏板延伸方向ds延伸的延伸部321。而且,该延伸部321在比踏板轴心cl靠踏板延伸方向ds的另一侧固定于踏板垫40的板部41。因而,在驾驶员81对于踏板垫40进行了踩踏操作时,也能够利用轴30的延伸部321对抗驾驶员81的踏力,以使踏板垫40难以弯曲。总之,能够利用轴30的延伸部321有效地加强踏板垫40。
128.(4)另外,根据本实施方式,如图6以及图7所示,外壳主体11具有旋转轴支承部13。在该旋转轴支承部13的内侧形成有插入有轴30的轴部31的旋转轴孔13a,旋转轴支承部13能够旋转地支承该轴部31。而且,外壳罩12不支承轴30的轴部31,而是封堵形成于外壳主体11的内侧的外壳空间10a的开口部分10b。
129.例如假设在采用利用外壳主体11与外壳罩12支承轴部31的构成的情况下,由于外壳主体11与外壳罩12的组装的偏差等,有轴30相对于正规的姿态(例如设计上的姿态)倾斜的隐患。与此相对,在本实施方式中,仅用外壳主体11支承轴30,外壳罩12为不支承轴30的构成,因此能够抑制轴30相对于外壳主体11的姿态与正规的姿态相比倾斜。
130.(5)另外,根据本实施方式,如图7所示,在外壳主体11的旋转轴孔13a内设置轴承14,该轴承14配置于旋转轴支承部13与轴30的轴部31之间。
131.如此使用轴承14,从而能够减少旋转轴支承部13以及轴30的轴部31的磨损。因此,能够以较高的精度相对于旋转轴支承部13的中心将轴30的轴部31维持为同心,因此能够提高传感器单元50对踏板旋转角的检测精度。
132.(6)另外,根据本实施方式,如图4以及图7所示,轴30与踏板垫40一体旋转。而且,传感器单元50具有设于轴30的轴部31的转动部51与设于外壳10且输出与转动部51的相位相应的信号的信号输出部55。
133.由此,能够利用传感器单元50直接检测踏板旋转角。即,传感器单元50输出与驾驶员81为了控制车辆行驶而进行了踩踏操作的实际的踏板垫40的操作量(即,踏板旋转角)相应的精度高的电信号。因而,该踏板装置1能够提高踏板操作量的检测精度,实现更准确的车辆行驶控制。
134.(7)另外,根据本实施方式,如图7所示,传感器单元50所具有的转动部51的旋转中心与信号输出部55的传感器中心都配置于踏板轴心cl上。由此,能够提高传感器单元50对踏板旋转角的检测精度。
135.(8)另外,根据本实施方式,如图7所示,传感器单元50的信号输出部55与外壳10具有能够将传感器单元50的信号输出部55的传感器中心组装于能够检测转动部51的相位的规定的位置的定位构造。该定位构造包括设于外壳10的凹部17与设于信号输出部55的凸部58,凹部17与凸部58能够嵌合。
136.由此,能够防止在将传感器单元50的信号输出部55组装于外壳10时信号输出部55的传感器中心从规定的位置(在本实施方式中是踏板轴心cl上的位置)发生位置偏移。其结果,能够提高传感器单元50对踏板旋转角的检测精度。
137.另外,在本实施方式中,设于外壳10的开口部18的内壁面相当于定位构造的凹部17。另一方面,设于信号输出部55的传感器保持部57的突起59的外壁面相当于定位构造的凸部58。由此,例示了定位构造的凸部58与凹部17的具体构成。
138.(9)另外,根据本实施方式,传感器单元50通过作为第一部分的转动部51与作为第二部分的信号输出部55伴随着踏板垫40的旋转相互非接触地相对移动来检测踏板旋转角。总之,传感器单元50是非接触式的传感器。即,由于转动部51与信号输出部55没有接触,因此不会有两部件的磨损、破损,能够提高来自传感器单元50的输出信号的可靠性。
139.(10)另外,根据本实施方式,传感器单元50的转动部51使信号输出部55周围的磁场伴随着踏板垫40的旋转而变化。而且,传感器单元50的信号输出部55构成为包含输出与信号输出部55周围的磁场相应的电信号的霍尔ic56。由此,例示了传感器单元50的转动部51与信号输出部55的具体构成。
140.(11)另外,根据本实施方式,如图2所示,踏板装置1是使用于线控制动系统84的制动踏板装置。因而,基于从踏板装置1的传感器单元50输出的检测精度高的电信号,ecu85能够实现更准确的车辆行驶控制。
141.另外,根据本实施方式,如图6所示,踏板垫40在规定的旋转角度范围内进行旋转动作。而且,踏板垫40在处于该规定的旋转角度范围内的任何旋转角度时都不与外壳10的旋转轴支承部13接触,而是离开该旋转轴支承部13地配置。由此,例如即使从驾驶员81侧对踏板垫40施加冲击,该冲击也不会从踏板垫40直接传递到旋转轴支承部13,因此能够保护旋转轴支承部13不受该冲击的影响。
142.另外,根据本实施方式,踏板装置1具备设于外壳10中的与踏板垫40相反的一侧的面的底板20。而且,外壳10经由该底板20固定于车身(具体而言是车厢内的地板2或者前围板)。
143.如此,通过在外壳10与车身之间设置底板20,外壳10的刚性变高。因此,可防止外壳10中的能够旋转地支承轴30的旋转轴支承部13的变形。因而,该踏板装置1能够防止传感器单元50所具有的转动部51与信号输出部55的位置偏移,提高踏板旋转角的检测精度。
144.另外,根据本实施方式,如图6所示,在踏板垫40的非踩踏状态下,踏板轴心cl相对于踏板垫40位于如下位置。即,在踏板垫40的非踩踏状态下,踏板轴心cl位于相对于踏板垫40中的在车辆上下方向db上与踏板轴心cl相同高度的部位和设于比踏板轴心cl靠车辆下方的部位向车辆前方离开的场所。
145.由此,能够在踏板轴心cl周围的空间设置传感器单元50。而且,在从驾驶员81观察踏板垫40时,在离开踏板垫40的里侧的位置配置传感器单元50,从而可以防止驾驶员81的脚意外地接触传感器单元50而导致传感器单元50发生故障这样的不良情况。因而,在利用
传感器单元50直接检测踏板旋转角的构成中,能够确保传感器单元50的强度安全性。
146.另外,根据本实施方式,踏板装置1为踏板垫40与轴30被固定、轴30的轴部31的中心成为踏板轴心cl的构成。该轴30的轴部31能够旋转地支承于外壳10的旋转轴支承部13。因此,与如前述的专利文献1那样将由树脂等形成的踏板垫的下端部能够旋转地连接于外壳的构成相比,能够提高踏板轴心cl周围的强度以及耐久性。
147.另外,根据本实施方式,如图4以及图5所示,踏板装置1具备全闭止挡件70与全开止挡件71。全开止挡件71设于外壳10中的比旋转轴支承部13靠车辆前方侧的部位,在驾驶员81对踏板垫40施加的踏力增加时与踏板垫40直接接触,规定踏板垫40的最大旋转位置。全闭止挡件70设于外壳10中的比旋转轴支承部13靠车辆后方侧的部位,在未对踏板垫40施加驾驶员81的踏力时与踏板垫40直接接触,规定踏板垫40的最小旋转位置。
148.如此规定踏板垫40的最小旋转位置与最大旋转位置,从而能够减少相对于从传感器单元50输出的踏板旋转角而言的输出信号的特性的偏差,提高传感器单元50的输出信号的可靠性。而且,通过限制成踏板垫40不旋转到设计值以,能够防止踏板垫40在不希望的范围内进行旋转动作,确保踏板装置1的强度安全性。
149.(第二实施方式)
150.对第二实施方式进行说明。在本实施方式中,主要说明与前述的第一实施方式不同的点。另外,对与前述的实施方式相同或等同的部分省略或者简化地来进行说明。这在后述的实施方式的说明中也相同。另外,在第二实施方式以后参照的图中,适当简化表示踏板装置1的各构成。
151.如图8所示,在本实施方式中,踏板垫40中的板形状厚度tp在板部41的整个长度上是一定的。因而,在该踏板垫40的板部41未设有厚壁部411与薄壁部412。另外,踏板垫40的踏面40a如范围rs所示,遍及踏板延伸方向ds的板部41的全长而形成。
152.另外,如图8~图10所示,本实施方式的踏板垫40除了板部41之外,还具有从踏板背面40b向踏板板厚方向dt的另一侧突出的一对背面突出设置部42。该一对背面突出设置部42配置于板形状一端面41a的附近,在踏板轴心方向dpa上相互分离地配置。例如如图10以及图11所示,一对背面突出设置部42在踏板轴心方向dpa上分别配置于板部41所具有的宽度的两端。
153.如图9以及图10所示,该一对背面突出设置部42分别具有孔形成部421,在该孔形成部421的内侧分别形成有以踏板轴心cl为中心向踏板轴心方向dpa贯通的插入孔421a。在该一对背面突出设置部42之间配置有构成外壳10的一部分的旋转轴支承部13,在该旋转轴支承部13的内侧形成有旋转轴孔13a。
154.对踏板垫40的一对插入孔421a与设于一对背面突出设置部42之间的旋转轴支承部13的旋转轴孔13a插入有以踏板轴心cl为中心向踏板轴心方向dpa延伸的圆柱状且为金属制的踏板轴35。
155.该踏板轴35相当于第一实施方式中的轴30的轴部31。本实施方式的踏板装置1取代第一实施方式的轴30(参照图4)而具备踏板轴35。另外,在本实施方式中,由于未设有该轴30,因此也未设有固定件34(参照图4)。
156.在本实施方式中,踏板轴35相对于踏板垫40的一对孔形成部421以不能相对旋转的方式固定,且以能够绕踏板轴心cl旋转的方式被旋转轴支承部13支承。如此,踏板轴35插
入于插入孔421a与旋转轴孔13a,使得踏板垫40与踏板轴35连结,并且经由该踏板轴35能够旋转地连结于旋转轴支承部13。而且,踏板垫40与踏板轴35绕踏板轴心cl一体旋转。
157.另外,如图9所示,在本实施方式中,背面突出设置部42为矩形状且插入孔421a为剖面圆形状,因此在插入孔421a周围,孔形成部421从插入孔421a到踏板轴心径向dpr的外侧所具有的径向宽度w不固定。在本实施方式中,例如孔形成部421中的相对于插入孔421a在踏板板厚方向dt上的另一侧的部位成为该不固定的径向宽度w之中最小的最小径向宽度wmin。
158.而且,踏板垫40的板部41在比踏板轴35靠踏板延伸方向ds的一侧具有距踏板轴35离开比该最小径向宽度wmin大的距离的部位413。在图9中,用圆弧acw表示以与最小径向宽度wmin相同的距离离开踏板轴35的位置。因而,板部41中的距踏板轴35离开比上述的最小径向宽度wmin大的距离的部位413是位于该圆弧acw的径向外侧的部位。
159.在本实施方式中,板部41中的构成比踏板轴35的一侧端位置p1e靠踏板延伸方向ds的一侧的部位、即图9中标注了点状的阴影线的部位相当于距踏板轴35离开比该最小径向宽度wmin大的距离的部位413。
160.如图8所示,本实施方式的传感器单元50配置于外壳10中的与第一实施方式不同的场所。具体而言,传感器单元50配置于离开踏板轴心cl的场所,固定于外壳10。
161.由于连结杆66与踏板垫40的旋转动作连动地位移,因此连结杆66的位移量与踏板旋转角对应。因此,传感器单元50检测该连结杆66的位移量作为踏板旋转角。作为本实施方式的传感器单元50,例如能够采用与第一实施方式相同的使用了霍尔ic56的非接触式的传感器等各种形式的传感器。
162.(1)如上述那样,根据本实施方式,如图9所示,踏板垫40的板部41在比踏板轴35靠踏板延伸方向ds的一侧具有距踏板轴35离开比孔形成部421的最小径向宽度wmin大的距离的部位413。由此,踏板垫40的板部41所具有的该部位413在车辆80中配置于驾驶员81的脚与踏板轴35之间。因此,能够利用踏板垫40的板部41保护踏板轴35与该踏板轴35周围的部分(例如旋转轴支承部13以及孔形成部421等)不受踩踏踏板垫40的驾驶员81的脚的影响。
163.除了以上说明以外,本实施方式与第一实施方式相同。而且,在本实施方式中,能够与第一实施方式相同地获得由与上述第一实施方式相同的构成所发挥的效果。
164.(第三实施方式)
165.对第三实施方式进行说明。在本实施方式中,主要说明与上述第二实施方式的不同点。
166.如图12所示,在本实施方式中,踏板垫40所具有的一对背面突出设置部42与第二实施方式相同,从踏板背面40b向踏板板厚方向dt的另一侧突出。但是,与第二实施方式不同,在本实施方式中,一对背面突出设置部42从踏板背面40b突出的突出高度明显比第二实施方式小。
167.因此,插入有踏板轴35的插入孔421a跨越背面突出设置部42与板部41这两方形成。即,形成有该插入孔421a的孔形成部421跨越背面突出设置部42与板部41这两方而设置。而且,踏板轴35的一部分而并非全部设于比踏板背面40b靠踏板板厚方向dt的另一侧。
168.另外,在图12中,也与上述的图9相同,用圆弧acw表示以与孔形成部421的最小径向宽度wmin相同的距离离开踏板轴35的位置。而且,在本实施方式中,踏板垫40的板部41也
在比踏板轴35靠踏板延伸方向ds的一侧具有距踏板轴35离开比该最小径向宽度wmin大的距离的部位413(即,在图12中标注了点状的阴影线的部位)。
169.另外,如图12以及图9所示,在本实施方式中,与第二实施方式比较,踏板轴心cl靠近板部41的板形状厚度中心ct。但是,在本实施方式中,踏板轴心cl也相对于板部41的板形状厚度中心ct向踏板板厚方向dt的另一侧偏移地设置,这一点没有改变。
170.除了以上说明以外,本实施方式与第二实施方式相同。而且,在本实施方式中,能够与第二实施方式相同地获得由与上述第二实施方式相同的构成所发挥的效果。
171.(第四实施方式)
172.对第四实施方式进行说明。在本实施方式中,主要说明与上述第二实施方式的不同点。
173.如图13以及图14所示,在本实施方式中,踏板垫40不具备一对背面突出设置部42,取而代之,踏板装置1具备用于将踏板垫40与踏板轴35连结的连结部件36。该连结部件36形成为使金属制的板材弯曲成l字状的形状。
174.连结部件36具有成为一体构成的固定部361与连结部362。该固定部361形成沿踏板背面40b延伸的形状,相对于踏板背面40b而固定。该固定部361与踏板垫40相对于外壳10的旋转轴支承部13在踏板轴心径向dpr上分离地配置。
175.连结部362从踏板轴35所具有的一端部向固定部361沿踏板轴心径向dpr延伸,固定于该踏板轴35的一端部。即,连结部362将固定部361与踏板轴35不能相对旋转地连结。
176.由此,踏板垫40、连结部件36与踏板轴35绕踏板轴心cl一体旋转。另外,在本实施方式中,踏板轴35也插入于旋转轴支承部13的旋转轴孔13a,被旋转轴支承部13支承为能够绕踏板轴心cl旋转。
177.除了以上说明以外,本实施方式与第二实施方式相同。而且,在本实施方式中,能够与第二实施方式相同地获得由与上述第二实施方式相同的构成所发挥的效果。
178.(第五实施方式)
179.对第五实施方式进行说明。在本实施方式中,主要说明与上述第二实施方式的不同点。
180.如图15以及图16所示,在本实施方式中,踏板垫40所具有的背面突出设置部42与第二实施方式不同,并非一对,而是在踏板垫40的板部41在踏板轴心方向dpa上具有的横向宽度的中央设有一个。本实施方式的背面突出设置部42在踏板轴心方向dpa上具有的横向宽度明显比踏板轴35的直径大。
181.而且,本实施方式的外壳10具有一对旋转轴支承部13。即,外壳10具有两个旋转轴支承部13。在该一对旋转轴支承部13之间配置有踏板垫40的背面突出设置部42。
182.对于一对旋转轴支承部13的旋转轴孔13a与设于该一对旋转轴支承部13之间的背面突出设置部42的插入孔421a插入有踏板轴35。在本实施方式中,踏板轴35相对于踏板垫40的背面突出设置部42不能相对旋转地固定,且相对于一对旋转轴支承部13的各个以能够绕踏板轴心cl旋转的方式连结。即,踏板垫40与踏板轴35被一对旋转轴支承部13支承为能够绕踏板轴心cl旋转,并绕踏板轴心cl一体旋转。
183.除了以上说明以外,本实施方式与第二实施方式相同。而且,在本实施方式中,能够与第二实施方式相同地获得由与上述第二实施方式相同的构成所发挥的效果。
184.(第六实施方式)
185.对第六实施方式进行说明。在本实施方式中,主要说明与上述第二实施方式的不同点。
186.如图17以及图18所示,在本实施方式中,传感器单元50的配置与第二实施方式不同。具体而言,本实施方式的传感器单元50与第一实施方式相同,设于踏板轴心cl上。
187.另外,在本实施方式中,也与第二实施方式相同,由于踏板轴35相对于固踏板垫40定,因此踏板轴35与踏板垫40绕踏板轴心cl一体旋转。而且,踏板轴35被旋转轴支承部13支承为能够绕踏板轴心cl旋转。
188.在本实施方式中,与第一实施方式相同,踏板旋转角被传感器单元50直接检测。踏板轴35中的设于与传感器单元50侧相反的一侧的端部插入于设于外壳罩12的孔19。
189.如图18所示,传感器单元50具有设于踏板轴35的转动部51与设于外壳10且输出与转动部51的相位相应的信号的信号输出部55。在本实施方式中,也与第一实施方式相同,作为传感器单元50,采用了转动部51与信号输出部55能够非接触地检测踏板旋转角的非接触式的传感器。
190.如图19以及图20所示,转动部51包含由磁体521、522以及磁轭523、524等形成为圆筒状的磁路52而构成。详细地说,形成为半圆状的一方的磁轭523将2个磁体521、522的n极彼此连接,另一方的磁轭524将2个磁体521、522的s极彼此连接。因此,如图20的箭头m1所示,形成磁通从一方的磁轭523向另一方的磁轭524行进的磁场。即,磁路52形成磁通以与踏板轴心cl交叉的方式流动的磁场。包含磁路52的转动部51固定于踏板轴35的端部,与踏板轴35一同旋转。转动部51的旋转中心与踏板轴心cl相同。
191.另一方面,信号输出部55包含霍尔ic56和对该霍尔ic56进行模制的传感器保持部57等而构成。传感器保持部57通过嵌合以及螺丝等定位构造相对于外壳10被定位固定。若转动部51与踏板轴35一同绕踏板轴心cl旋转,则在2个磁轭523、524之间行进的磁通的方向变化,通过霍尔ic56所具有的霍尔元件的感磁面的磁通密度变化。因此,信号输出部55输出与踏板旋转角相应的电信号。另外,图19示出了图20的xix-xix线的剖面。
192.除了以上说明以外,本实施方式与第二实施方式相同。而且,在本实施方式中,能够与第二实施方式相同地获得由与上述第二实施方式相同的构成所发挥的效果。
193.(第七实施方式)
194.对第七实施方式进行说明。本实施方式相对于第一实施方式变更了传感器单元50的构成的一部分,关于其他与第一实施方式相同,因此主要说明与第一实施方式的不同点。
195.如图21以及图22所示,本实施方式的踏板装置1作为非接触式的传感器单元50,例如采用了感应式的传感器单元50。该传感器单元50也具有设于轴30的轴部31的转动部51与设于外壳10并输出与转动部51的相位相应的信号的信号输出部55。另外,图21示出了图22的xxi-xxi线的剖面。
196.转动部51例如在以扇状设于轴30的轴部31的径向外侧的保持部511嵌入成形有被检测部512。另一方面,信号输出部55例如在固定于外壳10的传感器保持部57嵌入成形有传感器部551。另外,在图22中,用单点划线示出了轴30以及踏板垫40处于规定的旋转角度时的信号输出部55所具有的传感器部551的位置。若轴30以及踏板垫40旋转,则固定于轴30的轴部31的转动部51所具有的被检测部512的位置相对于传感器部551的位置变化。传感器部
551构成为输出与被检测部512的位置相应的电信号。因此,信号输出部55输出与踏板旋转角相应的电信号。
197.根据这种传感器单元50的构成,在本实施方式中,能够将传感器单元50所具有的被检测部512以及传感器部551配置于在踏板轴心径向dpr(参照图7)上偏离踏板轴心cl的位置。
198.除了以上说明以外,本实施方式与第一实施方式相同。而且,在本实施方式中,能够与第一实施方式相同地获得由与上述第一实施方式相同的构成所发挥的效果。
199.(第八实施方式)
200.对第八实施方式进行说明。本实施方式也相对于第一实施方式变更了传感器单元50的构成的一部分,关于其他与第一实施方式相同,因此主要说明与第一实施方式的不同点。
201.如图23以及图24所示,本实施方式的踏板装置1也采用了作为非接触式的传感器单元50使用了霍尔ic56的装置。该传感器单元50也具有设于轴30的轴部31的转动部51与设于外壳10且输出与转动部51的相位相应的信号的信号输出部55。另外,图23示出了图24的xxiii-xxiii线的剖面。
202.转动部51例如包含磁路52而构成,该磁路52由设于轴30的轴部31的径向外侧的圆弧状的两片磁轭525、526与设于该两片磁轭525、526的两端的磁体527、528形成。在两片磁轭525、526之间设置规定的空间。在外周侧的磁轭525的一端连接第一磁体527的n极,在另一端连接第二磁体528的s极。在内周侧的磁轭526的一端连接第一磁体527的s极,在另一端连接第二磁体528的n极。因此,如图24的箭头m2~m4所示,磁通流过两片磁轭525、526,并且在该两片磁轭525、526彼此之间的空间形成供漏磁通行进的磁场。转动部51固定于轴30的轴部31的端部,与轴30一同旋转。因而,转动部51的旋转中心与踏板轴心cl相同。
203.另一方面,信号输出部55包含作为传感器部的霍尔ic56和对该霍尔ic56进行模制的传感器保持部57等而构成。传感器保持部57通过嵌合以及螺丝等定位构造定位固定于外壳10。若转动部51与轴30一同绕踏板轴心cl旋转,则通过霍尔ic56所具有的霍尔元件的感磁面的磁通密度以及磁通的朝向变化。因此,信号输出部55输出与踏板旋转角相应的电信号。
204.根据这种传感器单元50的构成,在本实施方式中,能够将传感器单元50所具有的转动部51以及作为传感器部的霍尔ic56配置于在踏板轴心径向dpr(参照图7)上偏离踏板轴心cl的位置。
205.除了以上说明以外,本实施方式与第一实施方式相同。而且,在本实施方式中,能够与第一实施方式相同地获得由与上述第一实施方式相同的构成所发挥的效果。
206.(第九实施方式)
207.对第九实施方式进行说明。本实施方式也相对于第一实施方式变更了传感器单元50的构成的一部分,关于其他与第一实施方式相同,因此主要说明与第一实施方式的不同点。
208.如图25以及图26所示,本实施方式的踏板装置1采用了接触式的传感器单元50。该传感器单元50也具有设于轴30的轴部31的转动部51与设于外壳10且输出与转动部51的相位相应的信号的信号输出部55。另外,图25示出了图26的xxv-xxv线的剖面。
209.转动部51例如是设于踏板轴心方向dpa中的轴部31的前端的突起513。另一方面,信号输出部55例如具有固定于外壳10的固定部552和相对于该固定部552能够旋转地设置的传感器部553。传感器部553嵌合于设于轴30的轴部31的突起513,与该突起513一同旋转。作为信号输出部55,例如采用编码器、电位计等。信号输出部55输出与传感器部553的旋转角度相应的信号。
210.若轴30以及踏板垫40旋转,则该旋转从设于轴30的轴部31的突起513向传感器部553传递,传感器部553旋转。因此,具有传感器部553的信号输出部55输出与踏板旋转角相应的电信号。
211.根据这种传感器单元50的构成,在本实施方式中,能够将传感器单元50所具有的转动部51以及传感器部553配置于踏板轴心cl上。
212.除了以上说明以外,本实施方式与第一实施方式相同。而且,在本实施方式中,能够与第一实施方式相同地获得由与上述第一实施方式相同的构成所发挥的效果。
213.(第十实施方式)
214.对第十实施方式进行说明。本实施方式也相对于第一实施方式变更了传感器单元50的构成的一部分,关于其他与第一实施方式相同,因此主要说明与第一实施方式的不同点。
215.如图27以及图28所示,本实施方式的踏板装置1也采用了接触式的传感器单元50。该传感器单元50也具有设于轴30的轴部31的转动部51与设于外壳10且输出与转动部51的相位相应的信号的信号输出部55。另外,图27示出了图28的xxvii-xxvii线的剖面。
216.转动部51例如包括从轴30的轴部31向径向外侧延伸的臂部514与设于该臂部514的突起部515。另一方面,作为信号输出部55,例如采用了编码器、电位计等。信号输出部55例如具有固定于外壳10的固定部554和相对于该固定部554能够旋转地设置的传感器部555。而且,传感器部555包括与踏板轴心cl同轴地设置的圆筒部556与从该圆筒部556向径向外侧延伸的2个嵌合部557。构成传感器部555的2个嵌合部557嵌合于构成转动部51的突起部515,与该突起部515一同旋转。信号输出部55输出与传感器部555的旋转角度相应的信号。
217.若轴30以及踏板垫40旋转,则该旋转从设于轴30的轴部31的臂部514以及突起部515向传感器部555传递,传感器部555旋转。因此,具有传感器部555的信号输出部55输出与踏板旋转角相应的电信号。
218.除了以上说明以外,本实施方式与第一实施方式相同。而且,在本实施方式中,能够与第一实施方式相同地获得由与上述第一实施方式相同的构成所发挥的效果。
219.(第十一实施方式)
220.对第十一实施方式进行说明。本实施方式也相对于第一实施方式变更了传感器单元50的构成的一部分,关于其他与第一实施方式相同,因此主要说明与第一实施方式的不同点。
221.如图29以及图30所示,本实施方式的踏板装置1也采用了接触式的传感器单元50。该传感器单元50也具有设于轴30的轴部31的转动部51与设于外壳10且输出与转动部51的相位相应的信号的信号输出部55。另外,图29示出了图30的xxix-xxix线的剖面。
222.转动部51例如包括从轴30的轴部31向径向外侧突出的突起部516。另一方面,作为
信号输出部55,例如采用了编码器、电位计等。信号输出部55例如具有固定于外壳10的固定部558和相对于该固定部558能够旋转地设置的传感器部559。而且,传感器部559包括与踏板轴心cl同轴地设置的圆筒部560与从该圆筒部560的外缘平行于踏板轴心cl地延伸的2个嵌合部561。构成传感器部559的2个嵌合部561嵌合于转动部51的突起部516,与该突起部516一同旋转。信号输出部55输出与传感器部559的旋转角度相应的信号。
223.若轴30以及踏板垫40旋转,则该旋转从设于轴30的轴部31的突起部516向传感器部559传递,传感器部559旋转。因此,具有传感器部559的信号输出部55输出与踏板旋转角相应的电信号。
224.除了以上说明以外,本实施方式与第一实施方式相同。而且,在本实施方式中,能够与第一实施方式相同地获得由与上述第一实施方式相同的构成所发挥的效果。
225.(第十二实施方式)
226.对第十二实施方式进行说明。本实施方式是相对于第一实施方式而言的变形例,说明传感器单元50与外壳10的固定方法的例子。
227.如图31所示,在本实施方式中,作为踏板装置1所具备的传感器单元50,采用了非接触式的传感器。传感器单元50具有设于轴30的轴部31的转动部51与设于外壳10的信号输出部55。
228.在外壳10中的与轴30的轴部31的前端侧对应的位置设有用于设置传感器单元50所具有的信号输出部55的开口部18。另一方面,在信号输出部55的传感器保持部57设有与设于外壳10的开口部18的内壁面嵌合的突起59。设于外壳10的开口部18的内壁面与设于信号输出部55的传感器保持部57的突起59的外壁面构成了能够将信号输出部55的传感器中心组装于能够检测转动部51的相位的规定的位置的定位构造。该定位构造能够将信号输出部55的传感器中心与踏板轴心cl组装于同轴上。另外,传感器单元50的构成以及定位构造的构成并不限于上述例示,可以采用各种构成。
229.除了以上说明以外,本实施方式与第一实施方式相同。而且,在本实施方式中,能够与第一实施方式相同地获得由与上述第一实施方式相同的构成所发挥的效果。
230.(第十三实施方式)
231.对第十三实施方式进行说明。本实施方式是相对于第一实施方式而言的变形例,对传感器单元50与外壳10的固定方法的例子进行说明。
232.如图32所示,在本实施方式中,也是作为踏板装置1所具备的传感器单元50采用了非接触式的传感器。传感器单元50具有设于轴30的轴部31的转动部51与设于外壳10的信号输出部55。
233.传感器单元50的信号输出部55以其一部分埋入于外壳10的状态与外壳10一体地固定。作为将信号输出部55的一部分埋入外壳10的方法,例示将信号输出部55嵌入成形于外壳10的方法。由此,信号输出部55的传感器中心组装于能够检测转动部51的相位的规定的位置。在本实施方式中,信号输出部55的传感器中心与踏板轴心cl组装在同轴上。
234.(1)根据这种构成,在本实施方式中,能够简化传感器单元50的构成,例如实现部件数量的减少。而且,由于减少了信号输出部55相对于外壳10的组装偏差,因此能够防止信号输出部55的传感器中心偏离能够检测转动部51的相位的规定的位置(例如踏板轴心cl上的位置)。
235.除了以上说明以外,本实施方式与第一实施方式相同。而且,在本实施方式中,能够与第一实施方式相同地获得由与上述第一实施方式相同的构成所发挥的效果。
236.(第十四实施方式)
237.对第十四实施方式进行说明。本实施方式是相对于第二实施方式而言的变形例,如图33所示,将第二实施方式的踏板轴35(参照图10)置换为与第一实施方式相同的轴30。另外,本实施方式的踏板垫40不具有一对背面突出设置部42(参照图10)。
238.具体来说,在本实施方式中,轴30例如形成为将圆柱状的金属制的棒材弯折多次的形状。轴30具有轴部31、固定部32与连结部33。轴部31是以踏板轴心cl为中心向踏板轴心方向dpa延伸的踏板轴,并且是配置于旋转轴支承部13的部位。固定部32是以不能旋转的方式固定于踏板垫40的部位。详细地说,固定部32固定于踏板垫40中的踏板背面40b。连结部33是将轴部31与固定部32连结的部位。
239.除了以上说明以外,本实施方式与第二实施方式相同。而且,在本实施方式中,能够与第二实施方式相同地获得由与上述第二实施方式相同的构成所发挥的效果。
240.(第十五实施方式)
241.对第十五实施方式进行说明。在本实施方式中,主要说明与上述第二实施方式的不同点。
242.如图34所示,本实施方式的踏板垫40所具有的背面突出设置部42并非一对(即,两个),而是设有一个。而且,在该背面突出设置部42未形成有插入孔421a,背面突出设置部42从径向外侧接合于踏板轴35。由此,踏板垫40绕踏板轴心cl与踏板轴35一体旋转。
243.踏板轴35与设于外壳10的旋转轴支承部13的内壁滑动接触,能够旋转地被直接支承。另外,踏板轴35仅支承于设于外壳主体11的旋转轴支承部13,未支承于外壳罩12。
244.除了以上说明以外,本实施方式与第二实施方式相同。而且,在本实施方式中,能够与第二实施方式相同地获得由与上述第二实施方式相同的构成所发挥的效果。
245.(第十六实施方式)
246.对第十六实施方式进行说明。在本实施方式中,主要说明与上述的第十五实施方式的不同点。
247.如图35所示,在本实施方式中,在设于外壳主体11的旋转轴支承部13安装有圆筒状的轴承14。该轴承14的中心与踏板轴心cl一致。而且,踏板轴35能够旋转地支承于该轴承14。因而,踏板轴35能够以旋转轴支承部13的中心(即,轴承14的中心)为轴旋转。另外,踏板轴35仅支承于设于外壳主体11的旋转轴支承部13的轴承14,未支承于外壳罩12。
248.通过如此使用轴承14,能够减少旋转轴支承部13以及踏板轴35的磨损。因此,能够高精度地相对于旋转轴支承部13的中心将踏板轴35维持为同心,因此能够提高传感器单元50对踏板旋转角的检测精度。
249.除了以上说明以外,本实施方式与第十五实施方式相同。而且,在本实施方式中,能够与第十五实施方式相同地获得由与上述第十五实施方式相同的构成所发挥的效果。
250.(第十七实施方式)
251.对第十七实施方式进行说明。本实施方式相对于第一实施方式废除了底板20(参照图4),关于其他与第一实施方式相同,因此主要说明与第一实施方式的不同点。
252.如图36所示,在本实施方式中,踏板装置1不具备底板20。因此,踏板装置1所具备
的外壳10利用螺栓21等直接安装于车辆80的车厢内的地板2或者前围板。
253.(1)因而,能够由构成车身的一部分的地板2或者前围板直接承受作用于外壳10的驾驶员81的踏力。因此,例如能够抑制外壳10与组装于该外壳10的部件的相互间的变形,进而能够实现传感器单元50对踏板旋转角的检测精度的提高。
254.除了以上说明以外,本实施方式与第一实施方式相同。而且,在本实施方式中,能够与第一实施方式相同地获得由与上述第一实施方式相同的构成所发挥的效果。
255.(第十八实施方式)
256.对第十八实施方式进行说明。在本实施方式中,主要说明与上述第二实施方式的不同点。
257.如图37所示,在本实施方式中,踏板垫40具有片材414。该片材414在踏板垫40的板部41上粘附于踏板板厚方向dt的一侧。片材414例如是橡胶片材,设于板部41中的偏向踏板延伸方向ds的另一侧的位置。
258.在踏板垫40中,板部41包含片材414而形成板形状,因此片材414构成了形成板形状的板部41的一部分。即,板部41的板形状是指包含片材414的形状。因此,在本实施方式中,踏板垫40的板部41的厚度不固定,板部41具有厚壁部411与相对于厚壁部411配置于踏板延伸方向ds的一侧的薄壁部412。而且,片材414包含在厚壁部411中,不包含在薄壁部412中。厚壁部411的厚度t1p比薄壁部412的厚度t2p大。
259.在板部41具有厚壁部411与薄壁部412这一点,本实施方式与第一实施方式相同。因而,厚壁部411中的踏板板厚方向dt的一侧的表面即片材414中的踏板板厚方向dt的一侧的表面作为踏板垫40的踏面40a发挥功能。该踏面40a如范围rsa所示,遍及片材414在踏板延伸方向ds上的全长而形成。另外,在图37中,也与图6相同,例如板形状厚度中心ct用在厚壁部411与薄壁部412之间弯曲的单点划线表示。
260.除了以上说明以外,本实施方式与第二实施方式相同。而且,在本实施方式中,能够与第二实施方式相同地获得由与上述第二实施方式相同的构成所发挥的效果。
261.(第十九实施方式)
262.对第十九实施方式进行说明。在本实施方式中,主要说明与上述第二实施方式的不同点。
263.如图38所示,在本实施方式中,踏板背面40b局部凹陷。因此,踏板背面40b具有该凹陷的底部作为凹陷底面40c。该凹陷底面40c相当于踏板背面40b中的位于踏板板厚方向dt的最靠一侧的部位。另外,凹陷底面40c向踏板延伸方向ds以及踏板轴心方向dpa(参照图10)扩展,形成为板部41的板形状的外侧面的一部分。在本实施方式中,踏板轴35的全部设于比该凹陷底面40c靠踏板板厚方向dt的另一侧。
264.除了以上说明以外,本实施方式与第二实施方式相同。而且,在本实施方式中,能够与第二实施方式相同地获得由与上述第二实施方式相同的构成所发挥的效果。
265.(其他实施方式)
266.(1)在上述的各实施方式中,踏板装置1被用作制动踏板装置,但这是一个例子。例如踏板装置1也可以被用作为了进行车辆80的驱动源的输出调整而被操作的加速踏板装置。进一步说,踏板装置1也可以是驾驶员81用脚操作的各种装置。
267.(2)在上述的各实施方式中,如图2所示,踏板装置1是使用于线控制动系统84的制
动踏板装置,但这是一个例子。例如也可以是,在设置踏板装置1的车辆80中不采用线控制动系统84,踏板装置1为踏板垫40机械连结于制动回路86所含的主缸866的构成。在这样的构成的情况下,踏板装置1也可以不具备传感器单元50。
268.(3)在上述的各实施方式中,如图6所示,踏板装置1具备具有弹性部件的反作用力产生机构60,但这是一个例子。例如在如上述那样踏板垫40机械连结于主缸866的情况下,踏板装置1也可以不具备反作用力产生机构60。
269.(4)在上述的第二实施方式中,如图9以及图10所示,踏板轴35相对于踏板垫40的一对背面突出设置部42而固定,被旋转轴支承部13支承为能够绕踏板轴心cl旋转,但这是一个例子。例如,也可以相反地将踏板轴35固定于旋转轴支承部13,且相对于一对背面突出设置部42可相对旋转地连结。这在第五实施方式中也相同。
270.(5)在上述的第十三实施方式中,如图32所示,成为传感器单元50的信号输出部55的一部分埋入于外壳10的状态,但也可以成为该信号输出部55全部埋入于外壳10的状态。
271.(6)在上述的第一实施方式中,作为信号输出部55与外壳10的定位构造的一个例子,如图7所示,说明了设于信号输出部55的凸部58与设于外壳10的凹部17嵌合的构成,但并不限定于此。该定位构造例如也可以构成为设于信号输出部55的凹部与设于外壳10的凸部嵌合。作为该凹部能够采用槽或者孔等各种构成,作为凸部能够采用销或者肋等各种构成。
272.(7)在上述的第一实施方式中,如图2所示,说明了线控制动系统84利用主缸866使流过制动回路86的制动液产生液压的情况,但并不限定于此。线控制动系统84例如也可以构成为利用液压泵使流过制动回路86的制动液产生液压。
273.(8)在上述的第一实施方式中,线控制动系统84所具有的ecu85由第一ecu851与第二ecu852构成,但并不限定于此,该ecu85也可以由一个或者三个以上的ecu构成。
274.(9)在上述的第一实施方式中,如图7所示,传感器单元50的信号输出部55与外壳10具有能够将信号输出部55的传感器中心组装于规定的位置的定位构造。而且,该定位构造能够将信号输出部55的传感器中心与踏板轴心cl组装在同轴上,但这是一个例子。例如只要信号输出部55能够检测转动部51的相位,则信号输出部55的传感器中心也可以偏离踏板轴心cl。
275.(10)在上述的各实施方式中,如图6所示,将踏板垫40支承为能够绕踏板轴心cl旋转的支承体具体为外壳10,但这是一个例子。该支承体也可以不形成为收容反作用力产生机构60等的外壳。
276.(11)在上述的第二实施方式中,如图8以及图9所示,踏板垫40的板部41的板形状以直线状延伸,但也可以设想一边弯曲一边延伸的情况。在像这样板部41的板形状弯曲的情况下,表示板形状厚度中心ct的单点划线(参照图9)也根据板形状而弯曲。
277.(12)另外,本公开并不限定于上述的实施方式,可以进行各种变形来实施。另外,上述各实施方式并不是相互无关,除了明确不能组合的情况以外,能够适当地组合。
278.另外,在上述各实施方式中,就构成实施方式的要素而言,除了特别明示为必须的情况以及在原理上明确认为必须的情况等以外,当然不一定是必须的。另外,在上述各实施方式中,在提及实施方式的构成要素的个数、数值、量、范围等数值的情况下,除了特别明示为必须的情况以及在原理上明确限定于特定的数字的情况等以外,并不限定于该特定的数
字。另外,在上述各实施方式中,在提及构成要素等的材质、形状、位置关系等时,除了特别明示的情况以及在原理上限定于特定的材质、形状、位置关系等的情况等以外,并不限定于该材质、形状、位置关系等。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。