1.本发明属于滑板车技术领域,涉及一种电动滑板车。
背景技术:
2.现有的电动滑板车包括车体以及分别安装在车体前端部和后端部的前轮和后轮,车体的前端部设有把手,把手控制前轮转向。车体上设有控制器,把手上设有霍尔转把,用户通过转动霍尔转把来给控制器信号,使得控制器能够驱动滑板车行驶,霍尔转把和控制器通过导线连接,这就需要较长的导线,导线的布置较为不便,且成本较高。
技术实现要素:
3.本发明针对现有技术存在的问题提出一种电动滑板车,目的在于克服现有滑板车导线布置较为不便的缺陷。
4.本发明是这样实现的:
5.一种电动滑板车,其特征在于,包括车体和可前后摆动地安装在车体上的摆动件,所述摆动件上设有踩踏区域和角度传感器,所述车体或所述摆动件上设有控制器与所述角度传感器连接。
6.所述车体和所述摆动件左右相对固定,所述车体的第一端设有两个转向轮,所述车体的第一端具有向下倾斜延伸的连接部,所述连接部上可转动安装转向件,所述转向轮安装在所述转向件上,所述转向轮和所述连接部在左右方向上错位。
7.两个所述转向轮对应的两个转向件之间设有连接件,所述连接件和所述转向件转动连接以使两个车轮联动转向。
8.所述连接件和所述摆动件或车体之间设有弹性件以驱使所述转向轮直行。
9.所述车体的第二端设有单个驱动轮,所述驱动轮上设有轮毂电机。
10.所述摆动件上具有第一踩踏区域和第二踩踏区域,所述第一踩踏区域和所述第二踩踏区域,所述第一踩踏区域和所述第二踩踏区域位于一体部件上。
11.所述摆动件的前端和后端与所述车体之间设有回位件以使所述摆动件复位到初始位置。
12.所述角度传感器为压力传感器,所述压力传感器对应所述回位件设置。
13.所述角度传感器为陀螺仪;或者所述角度传感器为距离传感器;或者所述角度传感器为磁场传感器。
14.所述摆动件包括踩踏件和具有内腔的安装件,所述踩踏件和所述安装件可拆卸连接,所述安装件内安装电池和控制器;
15.车体包括两根纵向杆,两根纵向杆之间有间隙,安装件嵌入两根纵向杆之间。
16.本发明所提供的一种电动滑板车,通过脚控制摆动件的摆动从而给控制器转向信号,使得滑板车无需通过把手控制行驶,避免了把手和控制器之间较长的导线设置,角度传感器和控制器的位置可以较近,降低成本,减少布线难度,脚控制摆动件前后摆动控制滑板
车的前行,便于摆动方向和行驶方向保持一致,降低操作难度,减少误操作风险。
附图说明
17.图1为滑板车的第一角度结构示意图;
18.图2为滑板车的第二角度结构示意图;
19.图3为滑板车的第三角度结构示意图;
20.图4为滑板车的爆炸结构示意图;
21.图5为滑板车安装摆动件之前的第一角度结构示意图;
22.图6为滑板车安装摆动件之前的第二角度结构示意图。
23.附图标注说明:100、车体;110、转轴;120、连接部;130、转向件;140、连接件;141、弹性件;142、扭转部位;150、回位件;160、纵向杆;200、摆动件;210、第一踩踏区域;220、第二踩踏区域;230、踩踏件;240、安装件;300、转向轮;400、驱动轮。
具体实施方式
24.以下便结合实施例附图,对本发明的具体实施方式作进一步的详述,以使本发明技术方案更易于理解、掌握。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
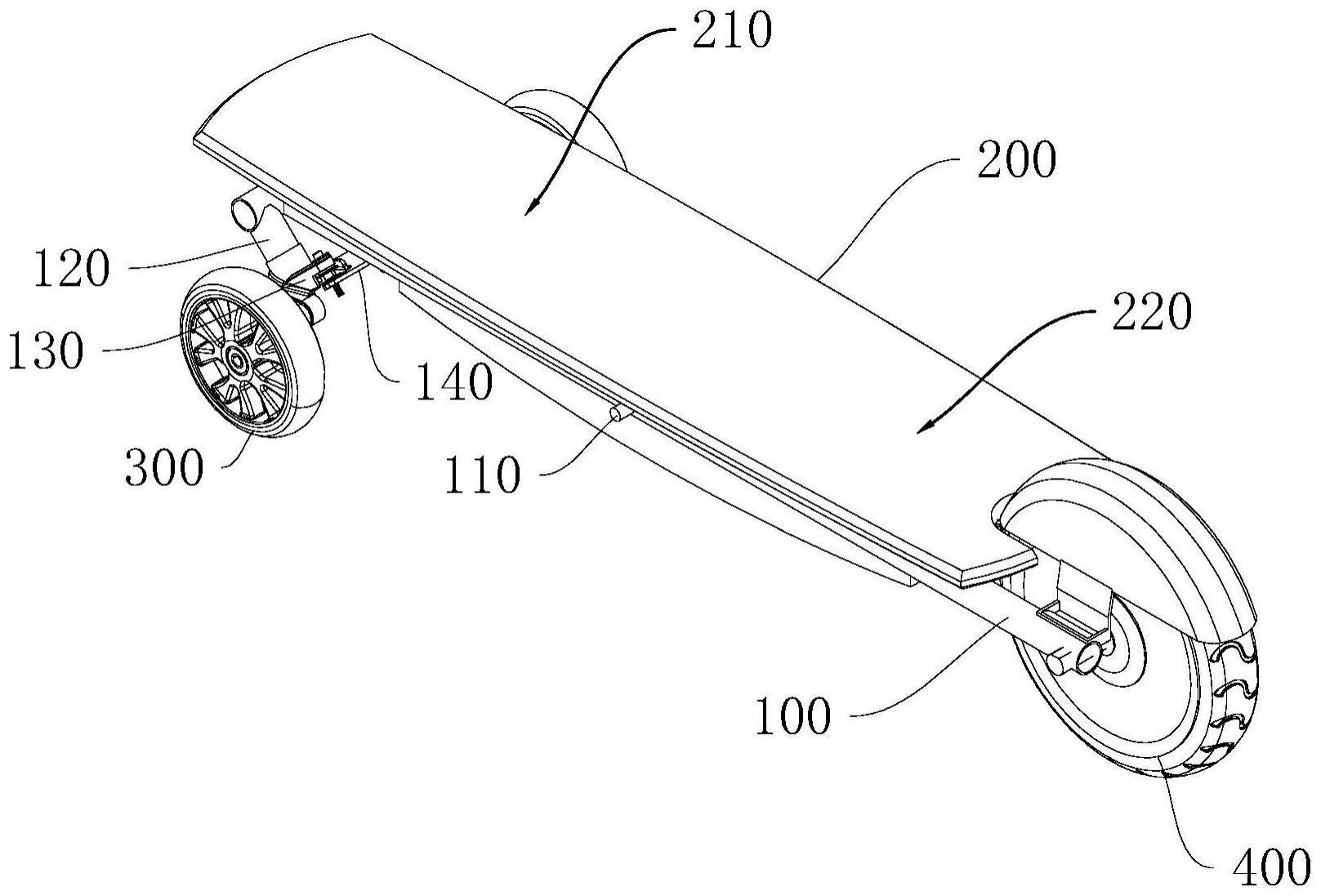
25.本实施例提供了一种电动滑板车,如图1-6所示,包括车体100和可前后摆动地安装在车体100上的摆动件200,所述摆动件200上设有踩踏区域和角度传感器,所述车体100或所述摆动件200上设有控制器与所述角度传感器连接。
26.操作时,用户踩在摆动件200上的踩踏区域,通过腿部力量或身体重心移动来控制摆动件200前后摆动,角度传感器就可以检测到摆动件200的摆动角度的变化并将相应的信息传递给控制器,控制器可以根据摆动件200的摆动情况控制器电动滑板车的电机运行,从而控制滑板车的直行。
27.通过脚控制摆动件200的摆动从而给控制器转向信号,使得滑板车无需通过把手控制行驶,避免了把手和控制器之间较长的导线设置,角度传感器和控制器的位置可以较近,降低成本,减少布线难度。
28.如果通过脚控制摆动件200左右摆动来控制滑板车前进,前进方向和摆动件200摆动方向不一致,用户就需要转换摆动方向和前进方向的对应关系,降低用户的反应速度,特别是对左右不分的用户来说,不利于用户快速掌控滑板车。脚控制摆动件200前后摆动控制滑板车的前行,便于摆动方向和行驶方向保持一致,降低操作难度,减少误操作风险。
29.如图1-4所示,所述车体100和所述摆动件200左右相对固定,即摆动件200左右摆动时,能够带动车体100一起摆动,但摆动件200前后摆动是不会带动车体100摆动的。摆动件200通过转轴110和车体100前后摆动连接,摆动件200左右摆动时,力通过转轴110传递给车体100带动车体100一起左右摆动。
30.所述车体100的第一端设有两个转向轮300,所述车体100的第一端具有向下倾斜延伸的连接部120,所述连接部120上可转动安装转向件130,所述转向轮300安装在所述转向件130上,如图3所示,所述转向轮300和所述连接部120在左右方向上错位。连接部120和转向件130通过连接轴转动连接。参阅图3角度,摆动件200向右倾斜,即摆动件200的右侧向
下移动,控制转向轮300转动以使滑板车向右转向。
31.如图4-6所示,两个所述转向轮300对应的两个转向件130之间设有连接件140,所述连接件140和所述转向件130转动连接以使两个车轮联动转向。这样连接件140以及转向件130形成四连杆机构,实现两个转向轮300联动转向,提高转向的稳定性。滑板车的转向无需控制器参与,降低控制计算负荷,减少控制器散热压力。
32.如图5所示,所述连接件140和所述摆动件200或车体100之间设有弹性件141以驱使所述转向轮300直行。弹性件141呈半包围结构,两个自由端固定在连接件140的中部区域,两侧边具有相对反向旋转的扭转部位142,两个扭转部位142通过销钉定位在摆动件200或车体100上,这样通过一件弹性件141就可以实现左右转向的回位,降低成本。
33.所述车体100的第二端设有单个驱动轮400,所述驱动轮400上设有轮毂电机。单个驱动轮400使得驱动轮400能够随着车体100左右摆动而倾斜,这样可以简化驱动轮400和车体100的安装结构,如果驱动轮400设置多个则需要差速设计,会大大增加成本。
34.在具体使用时,可以是两个转向轮300作为前轮,驱动轮400作为后轮,这样便于实现甩尾漂移动作。也可以是两个转向轮300作为后轮,驱动轮400作为前轮,滑板车无需把手转向,行驶方向更具有灵活性。驱动轮400的直径大于转向轮300,这样驱动轮400可以设置更大功率的轮毂电机,驱动轮400作为前轮是也具有更好的通过性。滑板车三轮设计,相比于两轮滑板车提高了稳定性,相比于四轮滑板车减少了滑板车配件,兼顾了稳定性和成本。
35.所述摆动件200上具有第一踩踏区域210和第二踩踏区域220,所述第一踩踏区域210和所述第二踩踏区域220,所述第一踩踏区域210和所述第二踩踏区域220位于一体部件上。这样更有利于用户利用自身重力控制摆动件200摆动,有利于前后轮的切换。第一踩踏区域210和第二踩踏区域220前后分布,有利于减少滑板车的宽度,提高滑板车通过狭窄道路的能力。在其他可选的实施例中,也可以是摆动件200仅具有一个踩踏区域,另一个踩踏区域所在的踏板和车体100不可摆动地固定在一起。
36.所述摆动件200的前端和后端与所述车体100之间设有回位件150以使所述摆动件200复位到初始位置。回位件150为弹簧,当摆动件200处于初始位置时,角度传感器就不会检测到摆动件200倾斜,使得滑板车可以处于静止状态。
37.所述角度传感器为陀螺仪。在其他可选的实施例中,所述角度传感器为压力传感器,所述压力传感器对应所述回位件150设置,当摆动件200向第一端倾斜时,对应的回位件150被压缩,压力传感器设置在车体100上时,压缩的回位件150对压力传感器的压力增大,控制器根据压力传感器压力增大的信息判断摆动件200摆动的方向和角度,从而控制滑板车以对应速度工作。
38.在其他可选的实施例中,所述角度传感器为距离传感器,通过检测摆动件200到车体100或地面的距离来判断摆动件200的摆动角度。或者所述角度传感器为磁场传感器,例如在车体100上设置磁体,在摆动件200上设置磁场传感器,磁场传感器靠近或远离磁体获取的磁场变化可以对应到摆动件200的摆动角度变化。
39.如图1-4所示,所述摆动件200包括踩踏件230和具有内腔的安装件240,所述踩踏件230和所述安装件240可拆卸连接,所述安装件240内安装电池和控制器。安装件240和转轴110连接,车体100包括两根纵向杆160,两根纵向杆160之间有间隙,安装件240嵌入两根纵向杆160之间,纵向杆160可以对安装件240形成保护。安装件240可以和踩踏件230一起摆
动,避免安装件240对踩踏件230造成干涉而致使踩踏件230摆动幅度过小。
40.在其他可选的实施例中,摆动件可以不包括安装件,安装件固定在车体上,由于安装件需要容纳电池、控制器等元器件,具有较大的高度,如果偏向下安装,容易导致滑板车离地间隙过小,如果偏向上安装,容易导致踩踏件和安装件干涉或者踩踏件位置过高。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。