本发明涉及照明装置和摄像系统。
背景技术:
专利文献1(jp特开2007-225591号公报)披露了一种照明装置,其中具备沿规定方向排列的多个光源和在光源的排列方向上延伸设置的聚光透镜,各光源的光通过聚光透镜,在离开聚光透镜规定距离的位置上会聚为线条形。该照明装置具备扩散透镜,该扩散透镜被设置在从各光源到聚光位置的光的路径中,使光主要向各光源排列方向扩散。专利文献2(jp特开2016-051203号公报)披露了一种光学信息读取装置,其中具备:投光系统,通过投光透镜将来自光源的光投射到读取对象上;受光系统,通过受光透镜使来自读取对象的反射光在摄像元件的受光面上成像;信号处理系统,接受来自摄像元件的输出信号,读取读取对象的信息。投光系统构成为,在与受光透镜的光轴大致垂直的投光平面中,在规定方向上较长,与该长度方向大致垂直的宽度方向上较短的带状范围内投射光。投光透镜的来自光源的光入射的入射面,在长度方向上形成为相同的凹形,同时在宽度方向上形成为相同的凸形。入射入射面的光朝投光平面射出的投光透镜的射出面形成为可以在投光平面的长度方向上得到规定的光量分布的自由曲面。但是,从均匀照射大照射范围(例如配光角大且从近距离到远距离)的观点出发,包括专利文献1、2在内的现有技术依然存在改善的余地。
技术实现要素:
本发明是鉴于以上诸问题提出的技术方案,其目的之一是提供能够均匀照射大照射范围的照明装置和摄像系统。本实施方式的照明装置的一个方式是用来照射摄像装置的摄像范围的照明装置,其特征在于,具有至少两个照明单元,所述至少两个照明单元分别具有沿规定方向排列设置的多个光源以及在所述多个光源的排列方向上延伸设置的聚光光学系统,所述多个光源的光通过所述聚光光学系统后会聚成线条形,所述至少两个照明单元以所述多个光源的排列方向、所述聚光光学系统的延伸方向、以及通过所述多个光源和所述聚光光学系统的光的会聚方向均互相构成角度而彼此朝外设置。本实施方式的照明装置在另一种方式是照射摄像装置的摄像范围的照明装置,其特征在于,具有光源和聚光光学系统,该聚光光学系统将所述光源的光会聚为线条形,而且还具备具有凸柱形表面的正柱形透镜和具有凹柱形表面的负柱形透镜本发明的效果在于提供能够均匀照射大照射范围的照明装置以及摄像系统。
附图说明
图1是搭载了本实施方式涉及的照明装置以及摄像系统的移动体的示意图。图2是本实施方式涉及的摄像系统的硬件结构框图。
图3是本实施方式涉及的摄像系统的照射范围及摄像范围的示意图之一。图4是本实施方式涉及的摄像系统的照射范围及摄像范围的示意图之二。图5是第一例以往照明光学系统的示意图。图6是第二例以往照明光学系统的示意图。图7是第一实施方式涉及的照明装置的示意图。图8是比较例涉及的照明装置的示意图。图9是第二实施方式涉及的照明装置的示意图。图10是比较例涉及的照明装置的示意图。图11是第三实施方式涉及的照明装置的示意图。图12是第四实施方式涉及的照明装置的示意图。图13是第五实施方式涉及的照明装置的示意图。图14是第六实施方式涉及的照明装置的示意图。图15是第七实施方式涉及的照明装置的示意图。
具体实施方式
以下参考附图,详述本实施方式涉及的照明装置以及摄像系统。本实施方式涉及的照明装置及摄像系统例如在对隧道等构造物的壁面进行摄影、检查时使用。用多个照明装置照射隧道的壁面时,要求照明装置单体均匀照射照射范围(例如,45
°
以上的大配光角、30cm至10m的近距离至远距离)。本实施方式用两个照明装置照射,因而可以在各照明装置不使用用于补偿球面像差的柱形透镜的情况下,以小型构成实现大照射范围。另外,用于隧道检查的摄像装置使用的不是一般的数码相机那样的区域传感器,而是线阵传感器,与此相配合,照明装置也使用线阵照明。换言之,摄像装置的摄像范围和照明装置的照明范围均为线条形。《搭载照明装置以及摄像系统的移动体》图1是一例搭载本实施方式的照明装置以及摄像系统的移动体的示意图,其中(a)是沿着移动方向看到的作为一例移动体的车辆500的示意图,(b)是车辆500在隧道600内部移动(行驶)的示意图。摄像系统100在设置在车辆500上的状态下,拍摄作为一例被摄体的隧道600的内壁。在图1的(a)中,摄像系统100被固定在车辆500的车顶上。车辆中安装摄像系统100的部分不限于车顶。也可以是车辆前方或后方的引擎盖等,如果车辆是卡车,也可以是货箱等。关于车辆上摄像系统100的安装,安装到车顶上时,与车辆用的滑雪托架等相同,可以使用挂钩部件等。在图1的(b)中,相对于道路700的中心,左侧有车道710,右侧有车道720。车辆500在车道720上相对于图面由内向外移动。本例中车道710(车辆500的对向车道)一方有人行道730。车道720一侧由于没有人行道,因此与有人行道的相比,车辆500在接近隧道600中车辆500一方的壁面的位置移动。图1的(b)的虚线100a表示摄像系统100的摄像范围。即摄像系统100拍摄隧道600的壁面之中由虚线100a表示的摄像范围内的区域600a(以粗线表示的区域)。如粗线所示,本实施方式中拍摄到隧道壁面(覆土部)与地面的边界为止。
一边移动车辆500一边用摄像系统100拍摄,拍到从隧道600的入口到出口之间图1的(b)的右半部壁面。然后,一边在图1的(b)的场合相反一方的车道710上沿相反方向移动车辆500,一边用摄像系统100拍摄,拍到从隧道600的入口到出口之间图1的(b)的左半部壁面。将图1的(b)的状态下拍摄的壁面的图像,与在与图1的(b)场合相反的一方的车道710上一边向反方向移动车辆500一边拍摄的壁面的图像拼接起来,可以获得从隧道600的入口到出口的整个壁面的摄影图像。为了将图像拼接起来形成一张展开图图像,优选将这些壁面图像拍摄为顶部互相重叠。换言之,在往返中拍摄隧道600的壁面时,为了避免隧道600的壁面上存在未被拍到的区域,优选使往与返各自的摄像区域在与车辆500行驶方向交叉的方向上重叠。车辆500不限于在道路上行驶的车辆,也可以是在铁路上行驶的车辆,不限于具有动力的车辆,也可以是像台车或手推车那样不具有动力的车辆。另外,移动体不限于车辆,也可以像无人机一样在空中移动。进而,隧道不限于交通用隧道,也可以是引水道等的隧道。本实施方式中的车辆遵循左侧通行的规则。因此,摄像装置被设置为拍摄行驶方向左侧。对于右侧通行的国家和情况,可以以拍摄行驶方向右侧的方式来设置摄像装置。此时,需要将后述的相机单元(摄像装置)300和照明单元(照明装置)400朝向旋转180度后安装到车辆上。图2是本实施方式涉及的摄像系统100的一例硬件结构框图。摄像系统100具有摄像单元300、照明单元400、摄像控制部110、tof(time of flight)传感器141、imu(inertial measurement unit)160、以及车速计/移动距离计170。图2中只描绘了一个摄像单元300,但实际上也可以在摄像系统100中搭载多个(例如五个)的摄像单元300。图2中虽然只描绘了一个照明单元400(相对于一个摄像单元300描绘的一个照明单元400),但也可以如后述的一种实施方式那样,相对于一个摄像单元300设置两个照明单元400。例如在位于中间的摄像单元300两侧分开设置两个照明单元400。还可以设置多套(例如五套)这种摄像单元300两侧设置两个照明单元400。如图1所示,摄像单元300拍摄隧道内侧的壁面,照明单元400为了让摄像单元300拍摄,向隧道内侧的壁面照射光。tof传感器141测量从隧道600的壁面到tof传感器141的距离。具体而言,tof传感器141照射隧道600的壁面,根据收到其反射光的时间,测量到隧道600的壁面的距离。如果受光元件是使用区域传感器的tof传感器141,则可以获得显示颜色与距离相对应的二维等高线图像。imu160可测量控制车辆500运动的三轴角度/角速度和加速度,而车速计/移动距离计170可测量车辆500的速度/移动距离。由imu160和车速计/移动距离计170所测量的数据通过摄像控制部110输出到hdd114中保存,用于之后通过图像处理对壁面图像的尺寸和倾斜等进行几何补偿。摄像单元300是一例摄像部(摄像装置),具有透镜331-1和线阵ccd331-2。线阵ccd331-2是像素以线性(线条形)排列的ccd,摄像单元300以线阵ccd331-2的像素排列方向与车辆500的移动方向交叉的方式固定在车辆500上。透镜331-1使位于透镜331-1的光轴方向上的被摄物体图像在线阵ccd331-2的摄像面上成像。线阵ccd331-2拍摄已成像的被摄物
体的图像。透镜331-1是一例“成像光学系统”。透镜331-1的内部设有光圈331-1a。光圈331-1a是具有光圈叶片的虹彩光圈,是直径可变的开口。通过在光圈叶片上连接电动机等驱动源,并根据控制信号驱动电机,可以改变开口的直径。这样,可以改变通过透镜331-1的光的光量,从而改变通过透镜331-1成像的被摄体图像的亮度。照明单元400是一例照明部(照明装置),具有透镜431-1和光源431-2。光源431-2可以使用金属卤化物灯或led(light emitting diode)等,通过透镜431-1照射位于透镜431-1的光轴方向的被摄物体。镜头431-1的内部设有光圈431-1a。光圈431-1a是直径可变的开口,通过改变开口的直径,可以改变经由光圈431-1照射的照明光的光量(亮度)。可以省略透镜431-1的光圈431-1a,通过调整光源431-2的led的输出进行光量调整。图2中照明单元400被描述为具有一个光源431-2,但是,如后述的一种实施方式那样,照明单元400也可以具有在规定方向上排列设置的多个光源。多个光源在规定方向上排列设置的方向相当于“排列方向”。“排列方向”也可以与“排列设置方向”互换(也可以是同义)。摄像控制部110具有cpu(central processing unit,中央处理器)111、rom(read only memory,只读存储器)112、ram(random access memory,随即访问存储器)113、hdd(hard disk drive,硬盘驱动器)114、外部i/f(inter/face,接口)115和蜂鸣器116,其间通过系统总线117相互电连接。rom112中保存各种程序和数据、各种设定信息等,ram113临时保存程序和数据。cpu111从rom112等将程序、数据、设定信息等读到ram113上,执行处理,实现摄像系统100整体的控制和图像数据的处理。在此,图像数据的处理是指,例如拼接多个摄像单元300各自拍摄的线阵图像的处理、将一边移动车辆一边用多个摄像单元300以规定的时间间隔连续拍摄的线阵图像沿着车辆移动方向拼接起来的处理等。cpu111还可以实现各种功能。cpu111实现的控制、图像处理及一部分或全部的各种功能可以通过fpga(field-programmable gate array,可编程阵列逻辑)或asic(application specific integrated circuit,专用集成电路)来实现。hdd114中保存从摄像单元300输入的图像数据、从tof传感器141、imu160以及车速计/移动距离计170输入的传感器数据等。外部i/f115实现供用户操作摄像系统100的用户界面的功能、以及用于摄像系统100与pc(personal computer,个人计算机)等外部装置进行数据或信号的交换的界面的功能。蜂鸣器116发出蜂鸣音,向用户发出警告通知等。图3和图4是本实施方式涉及的摄像系统100的照射范围及摄像范围的示意图之一及之二。如图3所示,两个照明单元300a、400b彼此分开,分别设置在位于中间的相机单元400的两侧,以互相构成角度而彼此朝外的方式设置。即图3中位于上方的照明单元400a被设置为从面向左方稍作顺时针方向旋转,图3中位于下方的照明单元400b被设置为从面向左方稍作逆时针方向旋转。如图3和图4所示,照明单元400a以前方为照射方向(图3的左方),将具有以纵向为长度方向的长方形照射范围la的照射光照射作为被摄体的隧道600的壁面(区域600a)上。照明单元400b也以前方(图3的左方向)为照射方向,将以纵向为长度方向的长方形照射范围lb的照射光照射作为被摄体的隧道600的壁面(区域600a)上。照明单元400a的照射范围la的下方的一部分和照明单元400b的照射范围lb的上方的一部分相互重叠。
如图3、图4所示,摄像单元300在照明单元400a、400b的照射范围la、lb中具有以纵向为长度方向的线条形摄像范围p。据此,摄像单元300可以拍摄由照明单元400a、400b的照射光照射到的作为被摄体的隧道600的壁面(区域600a)的图像。摄像范围p是摄像单元300所具备的线阵ccd331-2的多个像素的排列方向的范围。如此,本实施方式的摄像系统100利用两个照明单元400a、400b照射的照射光,能够拍摄作为被摄体的隧道600的壁面(区域600a)的图像。《本发明的背景及概要》随着社会基础设施的老朽化,维护管理变得越来越重要,隧道检查的效率提高和安全性成为重要课题。虽然有在车辆上安装强力照明装置和快门速度较高的线阵相机,一边行驶一边拍摄隧道内壁表面的技术,但一般都是使用能够配备电池和器材的大型车辆。对此,需要考虑使用扩大景深的相机和只高效照亮摄影部位的线阵照明装置,抑制装置数量,形成紧凑的系统构成,让普通车辆也能搭载的隧道监视系统。这样就可以用普通车辆一边行驶一边拍摄隧道壁面的图像。而以往的隧道监视系统为了实现照明装置小型化,对于一个照明单元只使用一个高输出的单色led,拍摄的图像只有单色图像。这样拍摄的照片不仅无法成为与实际外观相近的图像,而且还存在无法检测发锈或漏水、难以判断粉笔的颜色等问题。而如果将光源换成白色led,则存在输出功率不足,无法拍摄隧道壁面的问题。此外,上述专利文献1披露的技术方案中,具有与led所排列的线阵长度相当长度的线阵照明朝正下方照射,因此,实际的配光角非常小,主要用于近距离检查(只适合于近距离检查)。另一方面,隧道监控系统需要拍摄各种大小的隧道的壁面,需要照射远离照明装置的壁面,所需长度为几米,因此需要较大的配光角。上述专利文献2虽然配光角较大,但是,比如可使用的led最多两个,因此,存在数量不足以及因使用自由曲面透镜而造成性价比较差的问题。对此,本实施方式的照明装置及摄像系统的主要目的是均匀照射大照射范围(例如,配光角大,适用范围为包括近距离到远距离)。本实施方式的照明装置及摄像系统的另一个目的是,用例如一般车辆搭载的隧道监视系统拍摄隧道壁面的彩色图像。为了达到这些目的,本实施方式涉及的照明装置以及摄像系统是排列使用多个led的线阵照明装置,其作为使用多个led的广角线阵照明,能够高效照射摄影部位,进而,多个沿长度方向排列led的照明光学系统以相互形成角度的方式设置,因而照射光在摄影部位上互相重叠,实现配光角大的线阵照明。
41.《现有照明光学系统》图5是第一例现有照明光学系统的示意图。如图5所示,现有的照明光学系统具有特殊的led光源、透镜、在单一方向上具有负屈光度的柱形透镜、在单一方向上具有正屈光度的柱形透镜。图5中(a)具有正的柱形透镜,(b)具有负的柱形透镜。单一方向上具有正屈光度的柱形透镜具有把光会聚到线阵宽度方向上的功能,单一方向上具有负屈光度的柱形透镜具有在线阵长度方向上补偿球面像差的功能。采用线阵照明时,线阵的宽度方向为平行光,长度方向为扩散光,因此正的柱形透镜只对宽度方向施加能量,而不对长度方向施加能量。在这种配光角大的线阵照明的情况下,如后述的第一实施例那样,至少需要使用正负两个柱形透镜。
图6是第二例现有照明光学系统的示意图。比如,为了隧道监控系统彩色化需要高亮度的白色线阵照明,单一光源的构成无法确保摄影所需的充分的亮度,因此使用多个led光源。为了提高照明光的输出功率而在单一方向上排列led时,可以考虑在线阵的宽度方向或长度方向上排列。但是,在线阵的宽度方向上排列led时,在宽度方向上会聚的柱形透镜直径成为瓶颈,而在线阵的长度方向上排列led时,在长度方向上补偿球面像差的柱形透镜直径将成为瓶颈,难以避免大型化。图6举例说明了在线阵的长度方向上排列设置led,而在线阵的宽度方向上排列设置led时,由于每个柱形透镜直径的排列设置,也会导致装置的大型化。对此,本实施方式的照明装置及摄像系统适用于可搭载在一般车辆上的隧道监视系统,因此小型化是重要课题。《第一实施方式》图7是第一实施方式的照明装置的示意图,其中,(a)是照明装置的立体图,(b)线条形照明光在近距离投影面上的照度分布图,(c)是线条形照明光在远距离投影面上的照度分布图。(b)的近距离投影面的距离为1m,(c)的远距离投影面为8m,从近距离投影面到远距离投影面的距离范围例如可以为30cm~10m。第一实施方式的照明装置具有光源(led)410和将光源410的光会聚为线条形的聚光光学系统420。聚光光学系统420具有正透镜421、正透镜422、负柱形透镜423以及正柱形透镜424。图7a中的两片正透镜421和422是设置在负柱形透镜423和正柱形透镜424的前段的透镜,但该透镜的数量和正负类型具有一定的自由度,可以进行种种设计更改。例如,可以是一片正透镜或负透镜,也可以是正负各一片透镜,还可以是由正负透镜组合而成的三片以上的透镜。负柱形透镜423具有凹柱形面423a,正柱形透镜424具有凸柱形面424a。负柱形透镜423的凹柱形面423a的轴线和正柱形透镜424的凸柱形面424a的轴线分别与线条形聚光面的长度方向和宽度方向对应,彼此互相正交。在图7的(a)的例示中,正柱形透镜424的凸柱形面424a的轴线对应于条形聚光面的长度方向,负柱形透镜423的凹柱形面423a的轴线对应于条形聚光面的宽度方向,但该关系也可以反过来。负柱形透镜423的凹柱形面423a朝向光源410一方,正柱形透镜424的凸柱形面424a朝向线条形聚光面一方,负柱形透镜423的未形成凹柱形面423a的平面部和正柱形透镜424的未形成凸柱形面424a的平面部背靠背设置。由此,可以提高聚光光学系统420乃至照明装置的空间效率,实现小型化。负柱形透镜423和正柱形透镜424的排列顺序可以互换,形成凹柱形面423a和凸柱形面424a一方的表面上也具有自由度。例如,把负柱形透镜423的凹柱形面423a形成为朝向线条形聚光面一方,把正柱形透镜424的凸柱形面424a形成为朝向光源410一方。如图7的(b)和(c)所示,通过使用在长度方向上具有负屈光度的柱形透镜423补偿球面像差,与深度方向成较大角度的光束也可以作为平行光射出。此时,无论投影面的距离如何,都可以实现具有均匀照度分布的线阵照明。图8是比较例涉及的照明装置的示意图。该比较例省略了图7所示的第一实施方式的照明装置中的负柱形透镜423,取而代之,设置了没有屈光度的平行平面板425。在不使用补偿长度方向球面像差的负柱形透镜423的情况下,可以在配光角为20
°
左右的范围内射出
平行光线,但在此以上的角度因球面像差的影响而成为收敛光。隧道监视系统需要配光角为45
°
,因此需要第一实施方式那样的负柱形透镜423。另外,在没有组装负柱形透镜423的情况下,装设将与深度方向平行射出的光束作为平行光射出的正柱形透镜424时,与深度方向构成较大角度的光束由于产生到正柱形透镜424的光路差而引起的球面像差,成为收敛光。因此,强度会随着投影面的距离而变化,无法得到均匀的线阵照明。《第二实施方式》图9是第二实施方式涉及的照明装置的示意图,其中(a)和(b)是照明装置的示意图,(c)是线条形照明光的近距离投影面的照度分布图,(d)是线条形照明光的远距离投影面的照度分布图。(c)的近距离投影面为1m,(d)的远距离投影面为8m,但从近距离投影面到远距离投影面的范围例如为30cm~10m。图9包括从与多个光源430a/430b的排列方向垂直的方向看到的多个光源430a/430b以及两个照明单元400a/400b的聚光光学系统440a/440b的(a)图和从多个光源430a/430b的排列方向看到的(b)图。在第二实施方式的照明装置结合两个照明单元400a、400b形成配光角为50
°
的构成,因而一个照明单元的配光角为25
°
度水平。这样就可以形成为不使用沿长度方向排列led时成为瓶颈的,如第一实施方式(图7的(a))所示的那样,在补偿球面像差的长度方向上具有负屈光度的柱形透镜423的构成,可以沿长度方向排列led。当设置多个(例如五个)相机单元(摄像装置)300时,与摄像单元300的数量相对应地设置照明单元400a、400b,因此照明单元400a、400b可以为两组以上(至少设置两个照明单元即可)。照明单元400a具有沿规定方向排列的多个光源430a和在多个光源430a的排列方向上延伸设置的聚光光学系统440a,多个光源430a的光通过聚光光学系统440a会聚为线条形。聚光光学系统440a包括正透镜441a、正透镜442a和正透镜443a。在图9的(a)和(b)中,正透镜441a、正透镜442a以及正透镜443a分别为平凸透镜,但也可以使两侧表面具有曲率。集光光学系统440a的构成具有自由度,可以包括一片、两片或四片以上的透镜。照明单元400b具有沿规定方向排列的多个光源430b和在多个光源430b的排列方向上延伸设置的聚光光学系统440b,多个光源430b的光通过聚光光学系统440b聚光为线条形。聚光光学系统440b包括正透镜441b、正透镜442b和正透镜443b。在图9的(a)和(b)中,正透镜441b、正透镜442b以及正透镜443b分别由平凸透镜,但也可以使两侧表面具有曲率。集光光学系统440b的构成具有自由度,可以包括一片、两片或四片以上的透镜。两个照明单元400a、400b的聚光光学系统440a、440b包括柱形透镜,相对于多个光源430a、430b的排列方向不具有屈光度、而相对于与多个光源430a、430b的排列方向垂直的方向具有正屈光度。也就是说,两个照明单元400a、400b的聚光光学系统440a、440b分别包括柱形透镜,该柱形透镜相对于多个光源430a、430b的排列方向不具有屈光度、而相对于与多个光源430a、430b的排列方向垂直的方向具有正屈光度。在图9的(a)和(b)中,构成两个照明单元400a/400b的正透镜441a/441b、正透镜442a/442b、正透镜443a/443b可以是作为相对于多个光源430a/430b的排列方向不具有屈光度、而相对于与多个光源430a/430b的排列方向垂直的方向具有正屈光度的透镜的柱形透镜。在第二实施方式的照明装置中,两个照明单元400a、400b以多个光源430a、430b的排列方向、聚光光学系统440a、440b的延伸方向、以及多个光源430a、430b和聚光光学系统
440a、440b的光的会聚方向彼此向外的方式形成角度来设置。这样就可以均匀照射大照射范围(例如,45
°
以上的配光角、30cm到10m的近距离到远距离)。两个照明单元400a、400b以投影面的各照明单元的条形照度分布互相结合起来的位置关系来设置。在第二实施方式的照明装置中,两个照明单元400a、400b被设置为互相形成角度,在投影面上重叠而使得配光角约为两倍。此时由于球面像差,近距离投影面的照度分布与远距离投影面的照度分布不同。对于照度分布的重叠部分,近距离投影面可以从单元之间的距离和角度进行调整,远距离投影面可以从单元之间的角度进行调整。此时照明单元的法线之间形成的角度约为25
°
,以排列在照明单元上的光源(led)的中心之间的中点为基准来测量视角,近距离投影面为全角50
°
以上,但形成均匀性差的线条形照度分布。远距离投影面为全角50
°
以上的均匀条形的照度分布。在图9的(c)和(d)中,两个照明单元400a和400b各自的照度分布用虚线表示,两个照明单元400a和400b的合成照度分布用实线表示。图10是比较例的照明装置的示意图。该比较例不带角度地设置图9所示的第二实施方式的照明单元400a、400b的其中一方的照明单元400x。图10包括从与多个光源430的排列方向垂直的方向看到的多个光源400和照明单元440x的聚光光学系统440的(a)图,和从多个光源430的排列方向看的(b)图。比较例的照明单元400x也具有排列多个光源430而实现小型化的透镜构成。如上所述,可以考虑不使用补偿长度方向上球面像差的柱形透镜作为使光源(例如led)更紧密排列的构成。在这种构成可以按照led基板的长度排列led,因此,不仅可以实现装置小型化,而且还可以设置多个led。但是,图10所示的比较例的缺点是,由于不补偿球面像差,因此照度分布会随着投影面的距离而变化,并且无法实现广角。此时,如果从排列的led的中心测量视角,线条形照度分布范围在近距离投影面时全角约为45
°
,远距离投影面时全角为约25
°
。这样,为了实现小型化而采用不使用补偿球面像差的柱形透镜时,照明光学系统的配光角变小。《第三实施方式》图11是第三实施方式的照明装置的示意图。其中,(a)和(b)是照明装置的构成的示意图,(c)是线条形照明光的近距离投影面的照度分布图,(d)是线条形照明光的远距离投影面的照度分布图。(c)的近距离投影面为1m,(d)的远距离投影面为8m,但从近距离投影面到远距离投影面的范围例如可以为30cm~10m。图11包括从与多个光源430a/430b的排列方向垂直的方向看到的多个光源430a/430b和两个照明单元400a/400b的聚光光学系统440a/440b的(a)图和从多个光源430a/430b的排列方向看到的多个光源430a/430b和两个照明单元400a/400b的聚光光学系统440a/440b的(b)图。在图9所示的第二实施方式中,由于照明单元400a、400b之间的距离(纵向间距)过小,近距离投影面的照度分布因重叠部分较多而变得过强。因此,第三实施方式通过增大照明单元400a、400b之间的距离(纵向间距),调整近距离投影面的重叠部分,从而调整近距离投影面的照度分布。由此,从近距离到远距离均能够实现投影面上的照度分布均匀的线条形照明。照明单元400a、400b的法线之间形成的角度约为25
°
,照明单元400a、400b之间的距离(纵向间距)约为450mm。以照明单元400a、400b中排列的光源(led)430a、440b的中心之间的中点为基准来测量视角时,近距离投影面和远距离投影面均为全角50
°
以上的均匀条形照度分布。
《第四实施方式》图12是第四实施方式涉及的照明装置的示意图,其中(a)和(b)是照明装置构成的示意图,(c)是线条形照明光的近距离投影面的照度分布图,(d)是线条形照明光的远距离投影面的照度分布图,(e)显示用反射器限制光源的发散角。(c)的近距离投影面为1m,(d)的远距离投影面为8m,但从近距离投影面到远距离投影面的范围例如可以为30cm~10m。图12包括从与多个光源430的排列方向垂直的方向看到的多个光源400和照明单元440的聚光光学系统430的(a)图和从多个光源430的排列方向看到的多个光源400和照明单元440的聚光光学系统430的(b)图。在第四实施方式的照明装置中,多个光源430中设有用于限制各光源430的发散角的反射器450,用以提高亮度。隧道监视系统中线阵照明的亮度越高,就越能拍摄大型隧道。在第四实施方式中,为了使从led向全方位发散的光高效地会聚为线阵照明,使用反射器450减小led的发散角,使更多的光会聚成线阵照明。此时,从排列的led的中心测量视角时,近距离投影面时条形照度分布范围的全角约为45
°
,远距离投影面时全角约为25
°
。《第五实施方式》图13是第五实施方式涉及的照明装置的示意图,其中(a)是照明装置构成的示意图,(b)是线条形照明光的近距离投影面的照度分布图,(c)是线条形照明光的远距离投影面的照度分布图。(b)的近距离投影面为1m,(c)的远距离投影面为8m,但从近距离投影面到远距离投影面的范围例如可以为30cm~10m。图13的(a)是从多个光源430a/430b的排列方向看多个光源430a/430b和两个照明单元400a/400b的聚光光学系统440a/440b的示意图。在第五实施方式的照明装置中,对第二实施方式的照明装置的多个光源430a、430b分别设置反射器450a、450b。两个照明单元(400a、400b)以相互形成角度的方式设置,通过投影面的重叠,配光角约为两倍。此时,两个照明单元400a、400b的法线之间形成的角度为25
°
,成为在以排列在照明单元中的led的中心之间的中点为基准测量视角的情况下,近距离投影面的全角为60
°
以上、远距离投影面的全角为50
°
以上的均匀条形照度分布。《第六实施方式》图14是第六实施方式涉及的照明装置的示意图,其中(a)是照明装置的构成的示意图,(b)是线条形照明光的近距离投影面的照度分布图,(c)是线条形照明光的远距离投影面的照度分布图。(b)的近距离投影面为1m,(c)的远距离投影面为8m,但从近距离投影面到远距离投影面的范围例如可以为30cm~10m。图14的(a)是从多个光源430a/430b的排列方向看多个光源430a/430b和两个照明单元400a/400b的聚光光学系统440a/440b的示意图。第六实施例的照明装置中对第三实施方式的照明装置中的多个光源430a、430b中分别设置反射器450a、450b。第六实施方式通过确保两个照明单元400a、400b之间具有较大的距离(纵向间距),能够减少近距离投影面的重叠。此时,无论是近距离还是远距离都能够实现均匀的线阵照明,因此,能够得到均匀照射大小各种尺寸的隧道壁面的线阵照明。两个照明单元400a、400b的法线之间形成的角度为25
°
,两个照明单元400a、400b的距离(纵向间距)约为110mm。当以照明单元中排列的led的中心之间的中点为基准测量视角时,近距离投影面和远距离投影面的全角均为50
°
以上的均匀线阵照度分布。
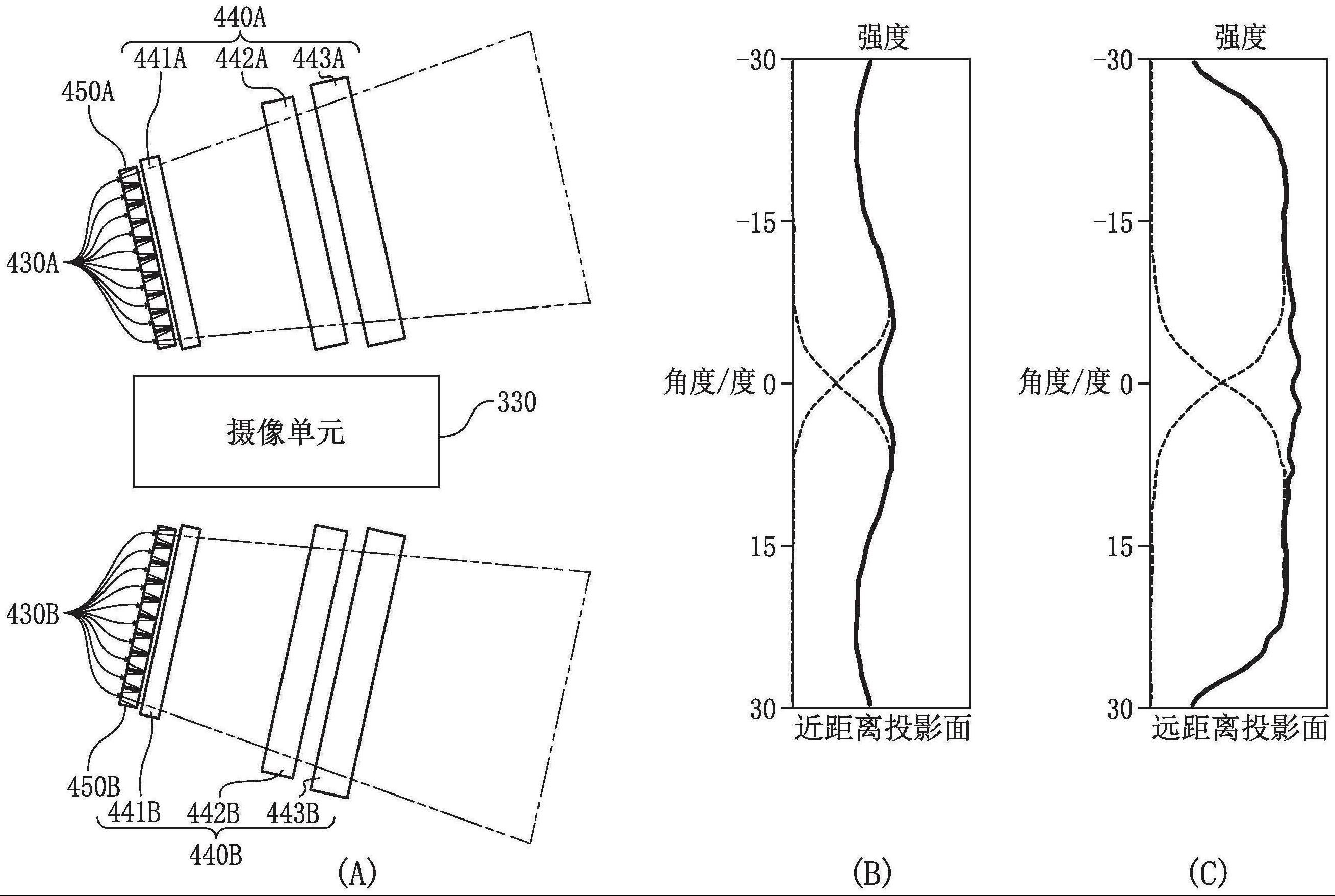
《第七实施方式》图15是第七实施方式涉及的照明装置的示意图,其中(a)是照明装置构成的示意图,(b)是线条形照明光的近距离投影面的照度分布图,(c)是线条形照明光的远距离投影面的照度分布图。(b)的近距离投影面为1m,(c)的远距离投影面为8m,但从近距离投影面到远距离投影面的范围例如可以为30cm~10m。图15的(a)是从多个光源430a/430b的排列方向看多个光源430a/430b和两个照明单元400a/400b的聚光光学系统440a/440b的示意图。在第七实施方式中,两个照明单元400a、400b分开设置在摄像单元300的两侧。换言之,本实施方式利用如第六实施方式那样确保距离(纵向间距)而设置的两个照明单元400a、400b之间的空间来设置摄像单元300。在第七实施方式中,照明光学系统对称地配置在摄像单元300的上下(或前后、左右),因此,摄像单元300与线阵照明的光轴一致,可以进行合适的拍摄。此时,线阵相机的摄影视角为全角45
°
,以摄相机的入射光瞳为基准时,照明单元在近距投影面和远距投影面均为全角50
°
以上的均匀线阵照明。因此,能够在从近距离到远距离的大范围内照射相机的摄影范围。附图标记说明100摄像系统300摄像单元(摄像装置)400,400a,400b照明单元(照明装置)410光源(led)420聚光光学系统423负柱形透镜423a凹柱面424正柱形透镜424a凸柱面430a,430b光源440a,440b聚光光学系统450,450a,450b反射镜500车辆(移动体)600隧道700道路
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
