1.本公开涉及一种儿童车,特别涉及一种驱动轮组件呈三角式布置的玩具车。
背景技术:
2.国内市面上现有的儿童玩具车,其外形结构上大多仿制汽车,避震结构一般采取局部式的分布,受力范围较窄,容易产生集中应力,对底盘伤害较大,避震效果较差,也容易对儿童产生伤害。
3.按照下表1所示意的第十届(2022)广东省大学生机械创新设计大赛优秀奖获奖作品名单,发明人基于早前申请的优先权,提出一种装配有三角式避震机构,稳定性更高,能够提升儿童车的安全系数的玩具车/儿童车。在先的优先权并非任何现有技术,之前也提交过证明材料,表1中我们的“仿生蜗牛—智能婴儿车”获得了广东省大学生机械创新设计大赛优秀奖,特此作为一种实用新型提请申请和审查:
4.表1第十届(2022)广东省大学生机械创新设计大赛优秀奖获奖作品名单
5.6.[0007][0008]
此外,现有的一体式曲面外壳的儿童车因曲面加工较为复杂,成本一般较高。另外,一体式的车体在局部受损需要更换时,只能整体更换,不仅麻烦而且浪费,不符合节能环保的大趋势。
[0009]
如图33所示,现有儿童车的车体为一体式曲面结构,该结构加工较为复杂,成本较高,另外,一体式曲面结构的车体在局部受损需要更换时,只能整体更换,不仅麻烦而且浪费。此外,如图34和如图35所示,现有儿童车的避震结构一般采取局部式的分布,该结构的避震结构受力范围较窄,容易产生集中应力,对底盘伤害较大,避震效果较差。
技术实现要素:
[0010]
针对现有技术中的不足,本公开的目的在于提供一种驱动轮组件呈三角式布置的玩具车,所述玩具车为一种智能儿童车,车体采用拼接式曲面结构,并装配有三角式避震机构,稳定性更高,能够提升儿童车的安全系数。
[0011]
为实现上述目的,本公开提供以下技术方案:
[0012]
一种驱动轮组件呈三角式布置的玩具车,所述玩具车为一种智能儿童车,包括:
[0013]
儿童车车体;
[0014]
儿童车车体内设置有儿童座椅;
[0015]
所述儿童车还包括底盘,所述底盘包括上底板和下底板,所述上底板通过连接板与所述儿童车车体连接,下底板依次连接有驱动装置和移动装置;
[0016]
所述上底板和下底板之间设置有信号采集装置和控制装置。
[0017]
优选的,所述信号采集装置包括超声波传感器和红外传感器。
[0018]
优选的,所述控制装置采用单片机最小系统。
[0019]
优选的,所述单片机最小系统包括电源开关及指示灯电路、5v稳压电路、3.3v稳压电路、核心板电路装置、核心板拓展接口电路、复位电路、晶振电路、传感器供电拓展接口电路、驱动接口电路和蜂鸣器接口电路。
[0020]
优选的,所述移动装置包括驱动轮组件和从动轮组件。
[0021]
优选的,所述驱动轮组件呈三角式,包括2个驱动轮,每个驱动轮通过连接臂与连接块连接。
[0022]
优选的,每个驱动轮上设置有固定盒,所述固定盒由上盖和下盖构成。
[0023]
优选的,所述驱动装置包括轮毂电机和直流无刷驱动器。
[0024]
优选的,所述儿童车车体采用拼接式曲面结构。
[0025]
优选的,所述儿童车还包括通信装置。
[0026]
优选的,还包括:与车配套的智能手环。
[0027]
与现有技术相比,本公开带来的有益效果为:
[0028]
1、采用拼接式曲面结构,成本更低,重量更轻;
[0029]
2、采用三角式避震机构,稳定性更高;由于驱动轮和连接臂以及连接块呈三角式布置,使得驱动轮组件的跨度更大,其受力范围更加广泛,受力更加均匀,车体的稳定性大大提升,而且在增加车体稳定性的同时,还使底盘装配的调节阀度更大,在底盘装配时,可允许误差更大,不仅装配更简单,而且当车体受到冲击时可以缓冲得更加从容,提高孩童安全性。
[0030]
3、灵活性高,可做到原地自转与小半径转向;
[0031]
4、同时在该车的结构的基础上,还可以开发软件功能使得其具有自动避障功能、自动跟随功能、虚拟墙功能、路径规划功能;
[0032]
5、该车采用双控制模式。
附图说明
[0033]
图1是本公开一个实施例提供的车的结构示意图;
[0034]
图2是本公开另一个实施例提供的车体示意图;
[0035]
图3是本公开另一个实施例提供的拼接式车体装配方式示意图;
[0036]
图4是本公开另一个实施例提供的底盘结构侧视图;
[0037]
图5是本公开另一个实施例提供的底盘结构后视图;
[0038]
图6是本公开另一个实施例提供的驱动轮结构示意图;
[0039]
图7是本公开另一个实施例提供的驱动轮装配示意图;
[0040]
图8是本公开另一实施例提供的总电路框图;
[0041]
图9是本公开另一实施例提供的电源开关及指示灯电路框图;
[0042]
图10是本公开另一实施例提供的5v稳压电路框图;
[0043]
图11是本公开另一实施例提供的3.3v稳压电路框图;
[0044]
图12是本公开另一实施例提供的核心板电路框图;
[0045]
图13是本公开另一实施例提供的核心板拓展接口框图;
[0046]
图14是本公开另一实施例提供的复位电路框图;
[0047]
图15是本公开另一实施例提供的晶振电路框图;
[0048]
图16是本公开另一实施例提供的红外传感器接口框图;
[0049]
图17是本公开另一实施例提供的超声波传感器接口框图;
[0050]
图18是本公开另一实施例提供的蓝牙通信装置接口框图;
[0051]
图19是本公开另一实施例提供的传感器供电拓展接口框图;
[0052]
图20是本公开另一实施例提供的驱动接口框图;
[0053]
图21是本公开另一实施例提供的蜂鸣器接口框图;
[0054]
图22至图32是本公开另一实施例提供的手环的相关电路示意图;
[0055]
图33至图35是现有技术的多个示意图。
[0056]
附图标记说明如下:
[0057]
1、车体(1.11、前板;1.12、侧板;1.13、后板;1.2、固定环;1.3、连结底座;1.4、凸起;1.5、凹槽;1.6、螺纹孔);2、底盘(2.1、连接板;2.2、上底板;2.3、下底板;2.4、驱动轮;2.5、连接臂;2.6、连接块;2.7、万向轮;2.8、第一避震器;2.9、第二避震器;2.10调节链;2.11铝方管;2.12、支撑柱;2.13、上盖;2.14、下盖);3、座椅。
具体实施方式
[0058]
下面将参照附图1至图21详细地描述本公开的具体实施例。虽然附图中显示了本公开的具体实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
[0059]
需要说明的是,在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可以理解,技术人员可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名词的差异作为区分组件的方式,而是以组件在功能上的差异作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”或“包括”为一开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本公开的较佳实施方式,然所述描述乃以说明书的一般原则为目的,并非用以限定本公开的范围。本公开的保护范围当视所附权利要求所界定者为准。
[0060]
为便于对本公开实施例的理解,下面将结合附图以具体实施例为例做进一步的解释说明,且各个附图并不构成对本公开实施例的限定。
[0061]
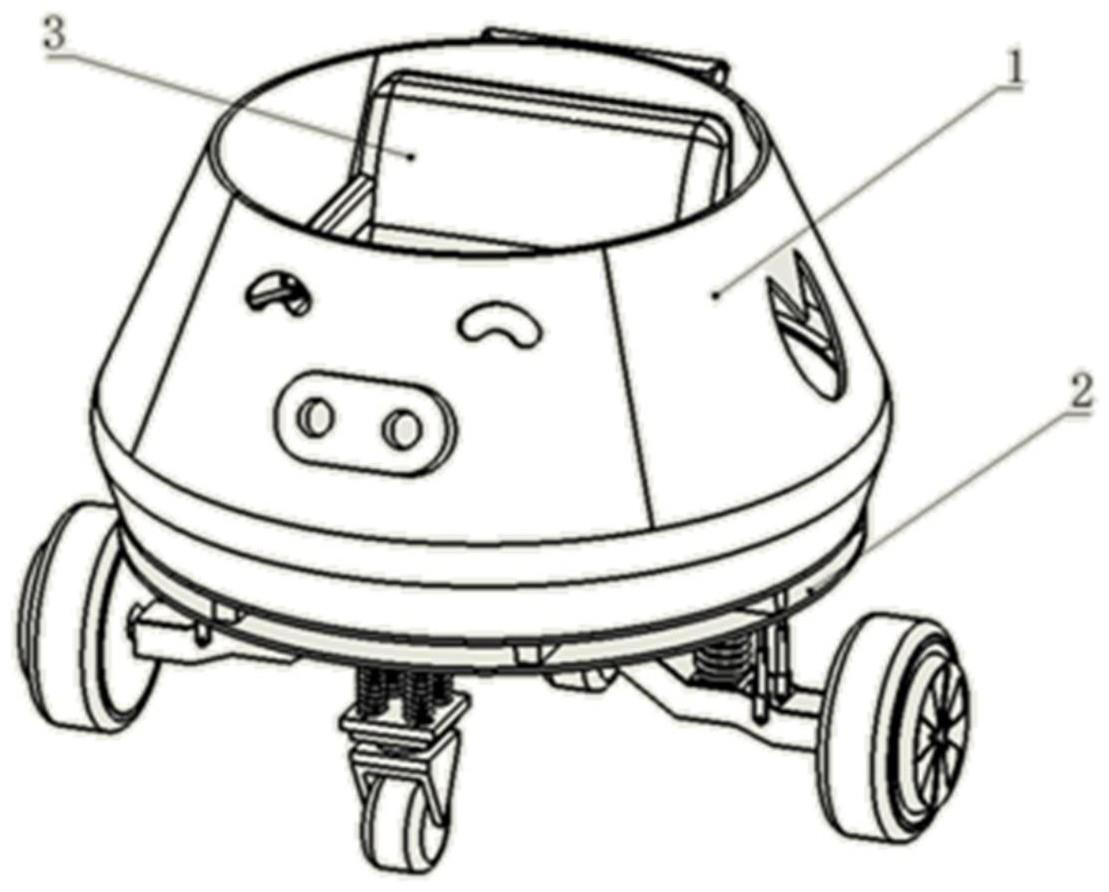
一个实施例中,如图1所示,一种驱动轮组件呈三角式布置的玩具车,所述车为一种智能儿童车,包括:
[0062]
儿童车车体1,所述儿童车车体采用拼接式曲面结构;
[0063]
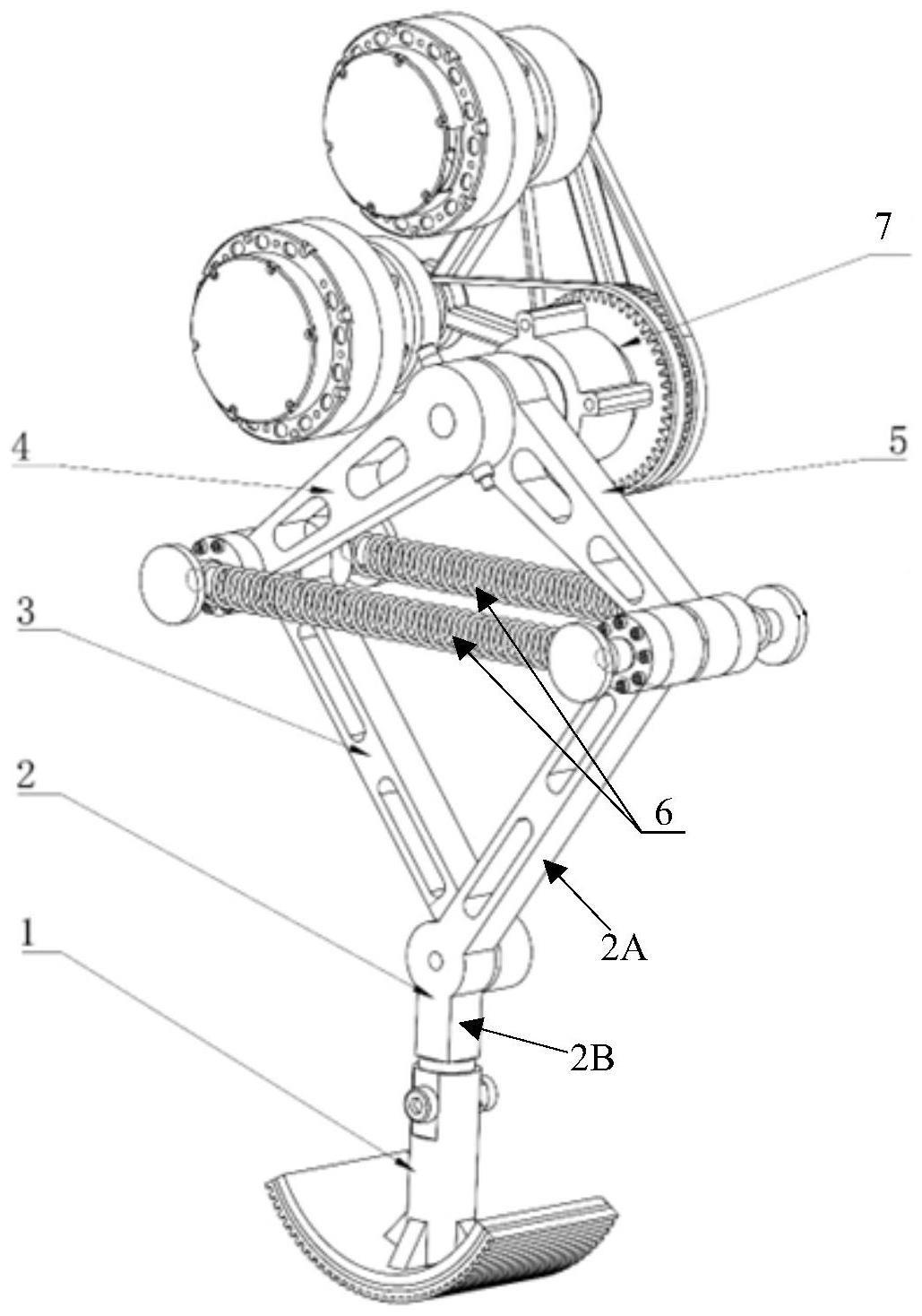
所述儿童车还包括底盘2,所述底盘2下方设置有移动装置,所述移动装置包括驱动轮组件,所述驱动轮组件包括2个驱动轮2.4,每个驱动轮通过连接臂2.5连接有连接块2.6,所述连接臂2.5和连接块2.6为转动副连接,所述驱动轮2.4和连接臂2.5以及连接块2.6呈三角式布置。
[0064]
本实施例中,示例性的,如图2、图3所示,儿童车车体1包括曲面状的前板1.11、侧板1.12、后板1.13和连接底座1.3,如图3所示,每块板上均设置有凸起1.4和凹槽1.5,通过凸起1.4和凹槽1.5之间的相互配合,从而将前板1.11、侧板1.12和后板1.13拼接在一起。每块板的底部还设置有螺纹孔1.6,通过螺纹与连接底座1.3上相应的孔位连接。为了进一步提高前板1.11、侧板1.12和后板1.13拼接后的稳定性,本实施例还增设了固定环1.2,将其套在前板1.11、侧板1.12和后板1.13与连接底座1.3的接触部位。
[0065]
需要说明的是,除了如图2所示的拼接结构之外,儿童车车体还可以采用其余多样化的设计,例如只采用前板和后板,或者增加侧板的数量,具体采用哪种设计需要根据实际工艺情况设定。
[0066]
现有儿童车车体基本采用一体式曲面结构设计,加工复杂且成本高。本实施例通过采用拼接式曲面结构,可以减少一体式设计中的曲面弧度,降低了曲面加工的复杂程度,
使量产的效率更高,成本更低;在装配方面,通过凹槽和凸起配合,使装配工作更加简单,而且当车体某一部分损坏时,相比一体式的曲面结构,仅需更换相应的部分,从而使得儿童车的使用寿命更长。
[0067]
此外,由于驱动轮和连接臂以及连接块呈三角式布置,从而使得驱动轮组件的跨度更大,其受力范围更加广泛,受力更加均匀,使得车体的稳定性大大提升,而且在增加车体稳定性的同时,还能使底盘装配的调节阀度更大,即在底盘装配时,可允许的误差更大,不仅使人工装配更加简单,而且当车体受到冲击时可以缓冲得更加从容。这显然提高孩童的安全性。
[0068]
另一个实施例中,所述移动装置还包括从动轮组件。
[0069]
本实施例中,所述从动轮组件包括万向轮2.7,万向轮2.7能够实现360
°
旋转,从而使得智能儿童车在遇到障碍物时执行转弯操作。
[0070]
结合图1能够发现,万向轮2.7作为从动轮位于前方,驱动轮2.4则位于后方两侧,即:本实施例包括三个轮,其中两个是在车体两侧对称设置的驱动轮,第三个则是置于车体前侧的从动轮。
[0071]
另有一个实施例中,儿童车还包括避震装置。
[0072]
本实施例中,所述避震装置包括第一避震器2.8、第二避震器2.9和调节链2.10,其中,第一避震器2.8置于万向轮2.7和下底板2.3之间,第二避震器2.9和调节链2.10置于下底板2.3和连接臂2.5之间。调节链2.10类似活动的关节,在装配时可调节驱动轮2.4的初始高度以及起到一定的承载作用,当车体整体受压时,第一避震器2.8和第二避震器2.9受压缓冲,同时,由连接臂2.5和连接块2.6构成的转动副以及调节链2.10顺势做出相应转动,由此起到避震效果。
[0073]
另一个实施例中,如图4、图5所示,所述底盘包括上底板2.2和下底板2.3,所述上底板2.2通过连接板2.1与所述儿童车车体1连接,下底板2.3连接有所述移动装置和避震装置。
[0074]
本实施例中,连接板2.1的上方设置有座椅3,下方通过支撑柱2.12(有4根,沿圆周均布受力)与上底板2.2连接,上底板与下底板2.3通过铝方管2.11(呈井字型,起固定作用)连接。
[0075]
另一个实施例中,儿童车还包括信号采集装置。
[0076]
本实施例中,所述信号采集装置包括超声波传感器和红外传感器,其中,超声波传感器位于车体前方正中央位置,用于采集车体前方与障碍物的距离,进而实现车的自动避障功能和自动跟随功能;红外传感器位于车体底盘正前方,呈左右对称分布,用于检测地面上铺设的黑线轨迹,进而实现儿童车的路径规划和虚拟墙功能。
[0077]
另一个实施例中,儿童车还包括控制装置。
[0078]
本实施例中,所述控制装置采用单片机最小系统,具体的,如图8所示,所述单片机最小系统包括电源开关及指示灯电路、5v稳压电路、3.3v稳压电路、核心板电路装置、核心板拓展接口电路、复位电路、晶振电路、传感器供电拓展接口电路、驱动接口电路和蜂鸣器接口电路。
[0079]
具体的,如图9所示,电源开关及指示灯电路通过dc接口连接至24v锂电池,经过开关k1再通入整个电路系统,指示灯电路包括led,led的正极串联10k电阻,负极接地。
[0080]
如图10所示,5v稳压电路包括ap2204k芯片,其中,引脚vin为输入端,与24v电源连接的同时并联电容c1;引脚en为使能端,连接至24v电源;引脚adj为电压调整引脚,经电阻r2和电阻r3调整分压后与电容c2并联;引脚vout并联电容c2后输出5v电压;引脚gnd连接地回路。
[0081]
如图11所示,3.3v稳压电路包括ams1117-3.3芯片,其中,引脚vin为输入端,与5v电源连接的同时并联电容c3和c4;引脚vout为输出端,与电容c5和c6并联后输出3.3v电压;引脚gnd连接地回路。
[0082]
如图12所示,核心板电路包括stm32f103c8t6芯片,其中,stm32f103c8t6芯片各io引脚与核心板拓展接口一一对应连接,stm32f103c8t6芯片的引脚vbat与vdd均与3.3v电源相连,引脚vss均与地回路相连,给芯片供电使用。
[0083]
如图13所示,核心板拓展接口采用20引脚的单排母,左引脚19、20和右引脚19连接地回路,左引脚20、右引脚18连接3.3v电源给核心板供电,其他io口均与核心板引脚一一对应连接。
[0084]
如图14所示,复位电路包括按键k2、电容c7和电阻r4,其中,按键k2的一侧连接地回路,另一侧连接stm32f103c8t6芯片的复位引脚nrst;电容c7的一侧连接地回路,另一侧连接按键k2和stm32f103c8t6芯片的引脚nrst的交点并与电阻r4串联后连接地回路。当按下按键k2时,会对stm32f103c8t6芯片进行复位。
[0085]
如图15所示,晶振电路包括两路,第一路包括电容c8、c9和晶振y2,其中,晶振y2的一侧与stm32f103c8t6芯片的引脚pd0及电容c8连接,另一侧与stm32f103c8t6芯片的引脚pd1及电容c9连接;第二路包括电容c10、c11和晶振y1,其中,晶振y1的一侧与stm32f103c8t6芯片的引脚pc14及电容c10连接,另一侧与stm32f103c8t6芯片的引脚pc11及电容c15连接。
[0086]
如图16所示,红外传感器接口有五路,其中,各红外传感器的引脚1连接5v电源;各引脚3连接地回路,给红外传感器供电;引脚hw1与stm32f103c8t6芯片的pb12相连,引脚hw2与stm32f103c8t6芯片的pb13相连,引脚hw3与stm32f103c8t6芯片的pa8相连,引脚hw4与stm32f103c8t6芯片的pa11相连,引脚hw5与stm32f103c8t6芯片的pa12相连。
[0087]
如图17所示,超声波传感器接口的引脚4连接5v电源;引脚1连接地回路,给超声波传感器供电;引脚2与stm32f103c8t6芯片的pb1连接;引脚3与stm32f103c8t6芯片的pb0连接。
[0088]
如图18所示,蓝牙通信模块接口的引脚5连接5v电源;引脚4连接地回路,给蓝牙通信模块通电;引脚1与stm32f103c8t6芯片的pc15连接;引脚2与stm32f103c8t6芯片的pa9连接;引脚2与stm32f103c8t6芯片的pa10连接。
[0089]
如图19所示,传感器拓展接口采用两排7p单排针,一排连接5v电源;另一排连接地回路,预留给其他传感器供电使用。
[0090]
如图20所示,驱动接口采用2*3双排针,引脚1与stm32f103c8t6芯片的pa4连接;引脚3与stm32f103c8t6芯片的pa2连接;引脚4与stm32f103c8t6芯片的pb14连接;引脚6与stm32f103c8t6芯片的pb15连接;引脚2及引脚5连接地回路。
[0091]
如图21所示,蜂鸣器接口采用5p单排针,引脚4及引脚5连接5v电源;引脚1及引脚2连接地回路,给蜂鸣器供电;引脚3与stm32f103c8t6芯片的pb5连接。
[0092]
在上述单片机最小系统中烧录有用于控制车体实现自动避障、自动跟随以及路径规划和虚拟墙功能的控制程序,下面,本实施例对上述功能作简单说明:
[0093]
自动避障功能:待超声波传感器初始化完成后,超声波传感器会实时检测车体前方是否有障碍物,当测得前方障碍物距离小于30cm时,超声波传感器将障碍物信息发送至单片机最小系统,单片机最小系统发送控制指令至驱动装置控制车体原地转弯,直到前方无障碍物后方可继续前进。
[0094]
自动跟随功能:待超声波传感器完成初始化后,单片机最小系统通过超声波传感器实时获取手机发送端与车体的距离并作差计算误差值,根据误差值与误差允许值比较得出当前儿童车的位置是否跟随手机发送端位置,若发生位置偏移,则计算得出位置偏移值,然后控制车体转弯对位置进行纠偏,从而实现自动跟随功能。
[0095]
路径规划功能:红外传感器初始化完成后,儿童车前方的红外传感器会实时检测地上的黑线轨迹,单片机最小系统会检测红外传感器的out管脚,当红外传感器识别到黑线轨迹时,out引脚为高电平,没有识别到轨迹时为低电平。据此来判断儿童车是否偏航,若没有偏航,单片机最小系统控制车体直行;若偏航,通过程序判断红外传感器当前的状态来判断车体下一步的寻迹方向。
[0096]
虚拟墙功能:红外传感器初始化完成后,在儿童车行驶过程中,单片机最小系统会实时检测红外传感器的out管脚进而判断车体是否到达虚拟墙边界,如果达到边界,单片机最小系统发送报警指令至蜂鸣器进行报警并控制车体转弯,没有到达边界,则按照当前模式继续行驶。
[0097]
需要说明的是,上述控制程序是现有的控制程序,本实施例并不对上述控制程序作任何技术上的改进。
[0098]
另一个实施例中,儿童车还包括驱动装置。
[0099]
本实施例中,所述驱动装置包括轮毂电机和直流无刷驱动器。当控制装置发送驱动信号至驱动装置时,直流无刷驱动器会根据驱动信号调节轮毂电机的电压对驱动轮进行调速,当左右两个驱动轮的速度不相等时,可利用差速对儿童车进行转弯控制,并实现儿童车360
°
原地旋转。
[0100]
另一个实施例中,如图6、图7所示,所述驱动轮2.4上设置有固定盒,用于连接连接臂2.5,所述固定盒由上盖2.13、下盖2.14组成,其中,下盖2.14通过孔位固定在连接臂2.5的末端,驱动轮连接部分为圆柱杆(切除一小部分用于固定),再由上盖2.13通过孔位把驱动轮连接部分固定在下盖2.14中。
[0101]
另一个实施例中,儿童车还包括通信装置。
[0102]
本实施例中,所述通信装置包括蓝牙通信模块、手机蓝牙app通信模块。蓝牙通信模块采用蓝牙3.0spp透传模块—jdy-31。手机蓝牙app通信模块为自主开发的手机app(不是本次申请的重点,因此不进行详细说明)。当手机app与蓝牙模块成功建立联系后,轻触app界面上的功能按钮,将会发送该功能的控制指令,儿童车上的蓝牙模块接收到控制指令后,经过数据解析将该控制指令发送至控制装置,控制装置结合控制指令与传感器感知的地面数据,经过处理后发出驱动信号给驱动模块,驱动模块根据该驱动信号做出反应以完成对儿童车的驱动任务,使得儿童车执行相应动作。
[0103]
另一个实施例中,本公开还揭示了与车配套的手环。
[0104]
本手环控制装置采用单片机stm32f103c8t6最小系统,如图22所示,单片机最小系统包括电源开关及指示灯电路、3.3v稳压电路、stm32f103c8t6芯片供电电路、复位电路、晶振电路、心率传感器接口电路、蓝牙接口电路、震动马达接口电路和oled显示屏接口电路。
[0105]
如图23所示,电源开关及指示灯电路通过接口连接至5v电池,经过开关k再通入整个电路系统,指示灯电路包括led,led的正极串联10k电阻,负极接地。
[0106]
如图24所示,3.3v稳压电路包括ams1117-3.3芯片,其中,引脚vin为输入端,与5v电源连接的同时并联电容c1和c2;引脚vout为输出端,与电容c3和c4并联后输出3.3v电压;引脚gnd连接地回路。
[0107]
如图25所示,核心板电路包括stm32f103c8t6芯片,其中,stm32f103c8t6芯片各io引脚与外设接口一一对应连接,stm32f103c8t6芯片的引脚vbat与vdd均与3.3v电源相连,引脚vss均与地回路相连,给芯片供电使用。
[0108]
如图26所示,复位电路包括按键sw、电容c5和电阻r5,其中,按键sw的一侧连接地回路,另一侧连接stm32f103c8t6芯片的复位引脚nrst;电容c5的一侧连接地回路,另一侧连接按键sw和stm32f103c8t6芯片的引脚nrst的交点并与电阻r5串联后连接地回路。当按下按键sw时,会对stm32f103c8t6芯片进行复位。
[0109]
如图27所示,晶振电路包括两路,第一路包括电容c7、c8和晶振y1,其中,晶振y1的一侧与stm32f103c8t6芯片的引脚pc14及电容c7连接,另一侧与stm32f103c8t6芯片的引脚pc15及电容c8连接;第二路包括电容c9、c10和晶振y2,其中,晶振y2的一侧与stm32f103c8t6芯片的引脚oscin及电容c9连接,另一侧与stm32f103c8t6芯片的引脚oscout及电容c10连接。
[0110]
如图28所示,通过4p排针与烧录器连接,给stm32f103c8t6芯片烧录下载程序,引脚4接3.3v电源,通过c6与引脚1相连接地,引脚2接stm32f103c8t6芯片引脚swclk,引脚3接stm32f103c8t6芯片引脚swio。
[0111]
如图29所示,oled接口采用4p单排座,引脚3连接5v电源;引脚4连接地回路,给oled供电;引脚2通过100r电阻与stm32f103c8t6芯片的pb8连接;引脚1通过100r电阻与stm32f103c8t6芯片的pb9连接。
[0112]
如图30所示,脉冲心率传感器接口的引脚2连接5v电源;引脚3连接地回路,给超声波传感器供电;引脚1与stm32f103c8t6芯片的pa0连接。
[0113]
如图31所示,蓝牙通信模块接口的引脚4vcc连接5v电源;引脚3gnd连接地回路,给蓝牙通信模块通电;引脚1rxd与stm32f103c8t6芯片的pa3连接;引脚2txd与stm32f103c8t6芯片的pa2连接。
[0114]
如图32所示,震动马达接口采用2脚接口,引脚1与stm32f103c8t6芯片的pa11连接;引脚2连接地回路。
[0115]
由此,手环控制实现的功能包括:
[0116]
1、信息接受:本设计采用hc05蓝牙模块,适用距离不长的无线信息传输,采用5v供电,通过蓝牙接收来自婴儿车发送的信息,接收后单片机进行处理;
[0117]
2、震动:当蓝牙接收信息之后,单片机通过分析接受的信息控制震动马达是否震动,以及震动时间,通过震动提醒宝妈婴儿的状态发生变化,让母亲可以及时地查看婴儿的当前状态并做出相应措施;
[0118]
3、心率采集:本设计采用pulse sensor光电心率传感器,利用光电容积法采集心跳频率,心率传感器上的led会发出一定波长的光射向皮肤,光敏电阻接收透过皮肤反射回来的光,同时该模块上的光电三极管将反射回来的光信号转换成单片机所能识别的电信号,与单片机的pa0连接,经过模数转换处理得到心率;
[0119]
4、oled显示:本设计采用0.91寸oled显示屏显示数据,采用5v电压供电,模块与单片机之间通过模拟iic方式进行数据访问。显示屏显示当前接收信息的状态,马达是否震动,以及其他需要显示进行人机交互的内容。
[0120]
以上应用了具体实施例对本公开进行了阐述,只是用于帮助理解本公开,并不用于限制本公开。任何熟悉该技术的技术人员在本公开所揭示的技术范围内的局部修改或替换,都应涵盖在本公开的范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。