1.本发明属于仿生机器人技术领域,具体涉及一种用于足式机器人的高弹跳腿机构。
背景技术:
2.随着机器人技术的快速发展,仿生机器人已成为机器人学科的一个重要分支,也是当前国内外学者研究的热点。相较于其它现有的机器人,仿生机器人在机械结构与控制方面都更复杂,但由于其仿生物并具备优异的性能,所以可以代替人类承担一些危险、复杂的特定任务。近些年来,仿生技术的不断发展使得仿生机器人具有更加广阔的应用领域,如军事侦察、资源勘探、水下探测、疾病治疗以及抢险救灾等工作。毋庸置疑,仿生机器人对于人类工业技术的发展有着不可替代的作用。
3.因为不同的学科领域使得仿生机器人可以细分为很多种类,根据适用环境的不同,仿生机器人可以分为空中仿生机器人、地面仿生机器人、水下仿生机器人。根据行进的方式不同,仿生机器人可以分为扑翼式、跳跃式、足式、轮式。
4.对于足式机器人,其具有良好的地形适应性,可以实现不同地形的行走和小跑,但现有足式机器人几乎无法实现高性能的越障。
技术实现要素:
5.有鉴于此,本发明提供了一种用于足式机器人的高弹跳腿机构,能够使足式机器人实现高性能越障。
6.本发明采用以下技术方案:
7.用于足式机器人的高弹跳腿机构,包括左端小腿连杆、左端大腿连杆、右端小腿连杆、右端大腿连杆、足端、同轴驱动机构以及储能弹簧;
8.所述左端小腿连杆的一端与所述左端大腿连杆的一端铰接;所述右端小腿连杆的一端与所述右端大腿连杆的一端铰接;所述左端小腿连杆的另一端与所述右端小腿连杆的另一端铰接;所述左端大腿连杆的另一端与所述右端大腿连杆的另一端铰接,形成四边形结构;
9.所述足端的一端在所述右端小腿连杆与所述左端小腿连杆铰接的一端固定,另一端能够与地面接触;
10.所述同轴驱动机构具有两个同轴设置的动力输出轴,分别与所述左端大腿连杆、所述右端大腿连杆固接,且所述左端大腿连杆与所述右端大腿连杆铰接部位的旋转轴线与所述动力输出轴的轴线共线;
11.所述储能弹簧的两端分别安装于所述四边形结构两个水平顶点之间,在所述四边形结构变形时,所述储能弹簧能够存储/释放能量。
12.进一步地,所述储能弹簧两端与所述平行四边形结构固定的部位设置有橡胶。
13.进一步地,所述储能弹簧至少有两个,且对称地设置于所述平行四边形结构所在
平面的两侧。
14.进一步地,所述同轴驱动机构包括第一驱动电机、第二驱动电机、第一小带轮、第二小带轮、内轴、外轴、第一大带轮以及第二大带轮;
15.所述第一驱动电机的输出端与所述第一小带轮固接,所述第一小带轮与所述第一大带轮皮带连接;
16.所述第二驱动电机的输出端与所述第二小带轮固接,所述第二小带轮与所述第二大带轮皮带连接;
17.所述内轴通过轴承同轴套设于所述外轴的内部,组成所述动力输出轴;所述外轴的一端与所述第一大带轮同轴固接,另一端与所述右端大腿连杆固接;所述内轴的一端与所述第二大带轮同轴固接,另一端与所述左端大腿连杆固接。
18.进一步地,所述第一小带轮与所述第二小带轮的直径相等;
19.所述第一大带轮与所述第二大带轮的直径相等。
20.进一步地,还包括能够与所述四足越障机器人的腰部固定的带轮固定架;
21.所述带轮固定架为等边三角形结构,所述等边三角形结构的一个角与所述第一大带轮通过轴承转动连接,所述等边三角形结构的另外两个较分别与所述第一小带轮、所述第二小带轮通过轴承转动连接。
22.进一步地,还包括能够与机器人腰部连接的腰腿部连接件;
23.所述腰腿部连接件通过轴承同轴套设于所述外轴的外部。
24.进一步地,所述足端与地面接触的一端为弧瓣状。
25.进一步地,所述足端包括足底、中间橡胶层和上部连杆;
26.所述足底与中间橡胶层层叠设置,且所述足底呈弧瓣状;
27.所述上部连接件的一端与所述中间橡胶层固接,另一端在所述右端小腿连杆与所述左端小腿连杆铰接的一端固定。
28.进一步地,所述平行四边形结构的铰接部通过塞打螺丝和轴承形成转动副。
29.有益效果:
30.1、左端小腿连杆的一端与左端大腿连杆的一端铰接;右端小腿连杆的一端与右端大腿连杆的一端铰接;左端小腿连杆的另一端与右端小腿连杆的另一端铰接;左端大腿连杆的另一端与右端大腿连杆的另一端铰接,形成四边形结构;足端的一端在右端小腿连杆与左端小腿连杆铰接的一端固定,另一端能够与地面接触;同轴驱动机构具有两个同轴设置的动力输出轴,分别与四边形结构中的左端大腿连杆、右端大腿连杆固接,且左端大腿连杆与右端大腿连杆铰接部位的旋转轴线与动力输出轴的轴线共线;储能弹簧的两端分别安装于四边形结构两个水平顶点之间,在四边形结构变形时,储能弹簧能够存储/释放能量。
31.如此,机器人在跳跃前,同轴驱动机构可以通过两个同轴设置的动力输出轴驱动左端大腿连杆和右端大腿连杆朝夹角增大的方向旋转(指左端大腿连杆和右端大腿连杆的夹角增大),使四边形变形结构变形,进而使储能弹簧伸长,实现机器人在跳跃前的储能;机器人跳跃时,同轴驱动机构可以通过两个同轴设置的动力输出轴驱动左端大腿连杆和右端大腿连杆朝夹角减小的方向旋转(指左端大腿连杆和右端大腿连杆的夹角减小),使四边形结构朝相反方向变形,同时,储能弹簧缩短,储能弹簧释放能量,最终实现机器人高性能越障;而且同轴驱动机构具有两个同轴设置的动力输出轴,能够使高弹跳腿机构更加简单紧
凑,降低高弹跳腿机构的重量,有利于足式机器人的跳跃。
32.2、储能弹簧两端与四边形结构固定的部位设置有橡胶,具有减震的效果,降低能量损失,提高该弹跳腿机构的弹跳能力。
33.3、储能弹簧至少有两个,且分别对称地设置于四边形结构所在平面的两侧,如此,能够提高储能效果,进一步提高该弹跳腿机构的弹跳能力。
34.4、第一驱动电机的输出端与第一小带轮固接,第一小带轮与第一大带轮皮带连接;第二驱动电机的输出端与第二小带轮固接,第二小带轮与第二大带轮皮带连接;内轴通过轴承同轴套设于外轴的内部,组成动力输出轴;内轴的一端与第一大带轮同轴固接,另一端与左端大腿连杆固接;外轴的一端与第二大带轮同轴固接,另一端与右端大腿连杆固接。
35.如此,在实现通过两个电机分别控制左端大腿与右端大腿转动的基础上,保证了结构的紧凑,有利于降低足式机器人的重量,进而提高其跳跃能力。
36.5、第一小带轮与第二小带轮的直径相等,第一大带轮与第二大带轮的直径相等,有利于降低第一电机和第二电机控制程序的复杂度,提高该高弹跳腿机构控制的可靠性。
37.6、足端与地面接触的一端为弧瓣状,使得该高弹跳腿机构装配到四足越障机器人上时能使四足越障机器人实现前倾动作,有利于实现四足越障机器人越障,也能使四足越障机器人实现后倾动作,避免四足越障机器人跳跃后摔到。
38.7、足底与中间橡胶层层叠设置,如此,能够使足底刚度远大于中间橡胶层刚度,通过这种刚度的分层设计,能使该高弹跳腿机构既具有良好的减震性能,又具有良好的承载能力。
附图说明
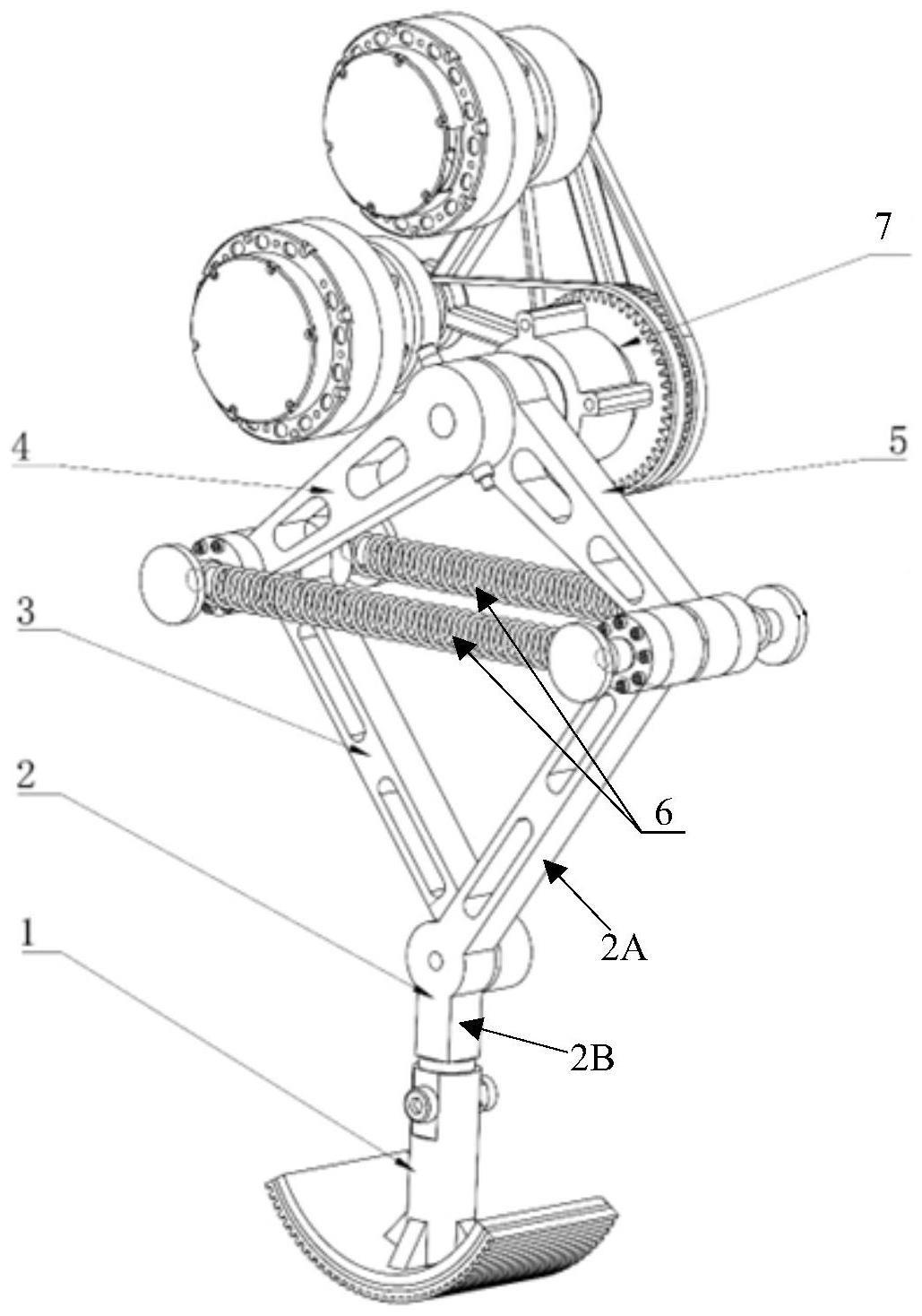
39.图1是本发明四足越障机器人的高弹跳腿机构的结构示意图;
40.图2是图1中储能弹簧的安装结构细节示意图;
41.图3是图1中同轴驱动机构动力输出轴一侧的结构示意图;
42.图4是图1中同轴驱动机构带轮固定架一侧的结构示意图;
43.图5是图1中同轴驱动机构的爆炸结构示意图(省略了部分零件);
44.其中,1-足端,2-右端小腿连杆,2a-杆段,2b-足端连接段,200-内轴,201-外轴,202-髋部挡圈,203-腰腿部连接件,204-第一大带轮,205-第二大带轮,206-第一小带轮,207-第二小带轮,208-第一电机连接件,209-第二电机连接件,210-第一驱动电机,211-第二驱动电机,212-带轮固定架,213-第一同步带,214-第二同步带,3-左端小腿连杆,4-左端大腿连杆,5-右端大腿连杆,6-储能弹簧,7-同轴驱动机构,8-储能弹簧固定件,9-橡胶塞。
具体实施方式
45.下面结合附图并举实施例,对本发明进行详细描述。
46.参照图1~图5,本实施提供一种四足越障机器人的高弹跳腿机构,包括左端小腿连杆3、左端大腿连杆4、右端小腿连杆2、右端大腿连杆5、足端1、同轴驱动机构8以及储能弹簧6,其中:
47.左端小腿连杆3的一端与左端大腿连杆4的一端铰接;右端小腿连杆2的一端与右
端大腿连杆5的一端铰接;左端小腿连杆3的另一端与右端小腿连杆2的另一端铰接;左端大腿连杆4的另一端与右端大腿连杆5的另一端铰接,形成四边形结构;
48.右端小腿连杆2与左端小腿连杆3铰接的一端还与足端1的一端固定,足端1的另一端与地面接触;同轴驱动机构7具有两个同轴设置的动力输出轴,分别与左端大腿连杆4、右端大腿连杆5固接,且左端大腿连杆4与右端大腿连杆5铰接部位的旋转轴线与动力输出轴的轴线共线;
49.储能弹簧6的两端分别安装于四边形结构两个水平顶点之间,且在本实施例中,在四边形结构所在平面的两侧各设置有一个储能弹簧6,这两个储能弹簧6对称设置,以其中一侧来说,储能弹簧6的一端通过橡胶塞9固接于左端小腿连杆3与左端大腿连杆4铰接部位设置的储能弹簧固定件8上,储能弹簧6的另一端通过另一个橡胶塞9固接于右端小腿连杆2与右端大腿连杆5铰接部位设置的另一个储能弹簧固定件8上。在四边形结构变形时,储能弹簧6能够存储/释放能量,参照图1,左端大腿连杆4与右端大腿连杆5之间的夹角变大时,储能弹簧6被拉伸存储能量,左端大腿连杆4与右端大腿连杆5之间的夹角变小时,储能弹簧6缩短释放能量。
50.如此,足式机器人在跳跃前,同轴驱动机构7可以通过两个同轴设置的动力输出轴驱动左端大腿连杆4和右端大腿连杆5朝其夹角增大的方向旋转(指左端大腿连杆4和右端大腿连杆5的夹角增大),使四边形变形结构变形,进而使储能弹簧6伸长,实现足式机器人在跳跃前的储能;足式机器人跳跃时,同轴驱动机构7可以通过两个同轴设置的动力输出轴驱动左端大腿连杆4和右端大腿连杆5朝其夹角减小的方向旋转(指左端大腿连杆4和右端大腿连杆5的夹角减小),使四边形结构朝相反方向变形,与此同时,储能弹簧6也缩短,储能弹簧6释放能量,最终实现足式机器人高性能越障;而且同轴驱动机构7具有两个同轴设置的动力输出轴,能够使高弹跳腿机构更加简单紧凑,降低高弹跳腿机构的重量,有利于足式机器人的跳跃。另外,储能弹簧6与四边形结构固接部位设置橡胶塞9,具有减震的效果,降低能量损失,提高该高弹跳腿机构的弹跳能力。
51.参照图1,上述的足端1包括足底、中间橡胶层和上部连杆,足底与中间橡胶层层叠设置形成弧形结构,其中足底与地面接触,上部连杆的一端与中间橡胶层固接,另一端与右端小腿连杆2固接。如此,足端1与地面接触的一端为弧形,使得该高弹跳腿机构装配到四足越障机器人上时能使四足越障机器人实现前倾动作,有利于实现四足越障机器人越障,也能使四足越障机器人实现后倾动作,避免四足越障机器人跳跃后摔到。
52.更具体地,如图1所示,上述右端小腿连杆2包括两段,为了便于阐述,将其中作为四边形一条边的一段称为杆段2a,另一段称为足端连接段2b,杆段2a与足端连接段2b在连接处形成144
°
的钝角,杆段2a作为上述四边形结构的一条边,足端连接段2b与足端1中的上部连杆连接;左小腿连杆2的144
°
钝角开口朝向背离左端小腿连杆3的方向。
53.而且,杆段2a与足端连接段2b连接处设置有螺纹孔,左端小腿连杆3与右端小腿连杆2铰接的一端设置有通孔,该通孔中同轴嵌设有三个轴承,左端小腿连杆3的通孔与右端小腿连杆2的螺纹孔对中后,使塞打螺丝穿过左端小腿连杆3通孔中的三个轴承后通过螺纹部与右端小腿连杆2的螺纹孔螺纹连接,其中塞打螺丝的光杆部位于轴承内部,作为该铰接处的转轴,令左端小腿连杆3与右端小腿连杆2之间的转动副为第一个转动副(下文通过塞打螺丝构成相应铰接处的转轴的原理与此相同)。左端小腿连杆3与左端大腿连杆4铰接的
一端设置有螺纹孔,对应地,左端大腿连杆4与左端小腿连杆3铰接的一端设置有通孔,通孔中同轴嵌设有三个轴承,使塞打螺丝穿过左端大腿连杆4通孔中的三个轴承后与左端小腿连杆3的螺纹孔螺纹连接,构成第二个转动副。右端小腿连杆2与右端大腿连杆5铰接的一端设置有通孔,通孔中同轴嵌设有三个轴承,对应地,右端大腿连杆5与右端小腿连杆2铰接的一端设置有螺纹孔,使塞打螺丝穿过右端小腿连杆2通孔中的三个轴承后与右端大腿连杆5的螺纹孔螺纹连接,构成第三个转动副。
54.上述的同轴驱动机构7包括第一驱动电机210、第二驱动电机211、第一小带轮206、第二小带轮205、内轴200、外轴201、第一大带轮204以及第二大带轮205,其中第一驱动电机210、第一小带轮206、第一大带轮204和外轴201构成右端大腿连杆5的驱动机构,第二驱动电机211、第二小带轮205、第二大带轮205和内轴200构成左端大腿连杆4的驱动机构,各零部件具体连接关系如下:
55.第一驱动电机210的输出端通过第一电机连接件208与第一小带轮206固接,第一小带轮206与第一大带轮204通过第一同步带213连接;第二驱动电机211的输出端通过第二连接件209与第二小带轮207固接,第二小带轮207与第二大带轮205通过第二同步带214连接;第一大带轮204和第二大带轮205同轴设置。
56.内轴200通过轴承同轴套设于外轴201的内部组成两个同轴设置的动力输出轴;外轴201的一端与第一大带轮204同轴固接,另一端与右端大腿连杆5固接,用于驱动右端大腿连杆5;内轴200的一端与第二大带轮205同轴固接,另一端与左端大腿连杆4固接,用于驱动左端大腿连杆4。内轴200与左端大腿连杆4的固接方式为:左端大腿连杆4与右端大退连杆5铰接的一端设置有垂直四边形结构所在平面的通孔以及垂直该通孔的螺栓孔,内轴200穿入该通孔后,使螺栓穿过该螺栓孔将左端大腿连杆4与内轴200固定(内轴200与左端大腿连杆4固定的一端也设置有螺栓孔)。右端大腿连杆5与左端大腿连杆4铰接形成第四个转动副。
57.同轴驱动机构7在通过两个电机分别控制左端大腿连杆4与右端大腿连杆5运动的基础上,保证了结构的紧凑,有利于降低足式机器人的重量,进而提高其越障能力。而且在该实施例中,第一小带轮206与第二小带轮207的直径相等,第一大带轮204与第二大带轮205的直径相等,有利于降低第一驱动电机210和第二电驱动电机211控制程序的复杂度,提高足式机器人的可靠性。
58.另外,上述同轴驱动机构7还包括能够与四足越障机器人的腰部固定的带轮固定架212和腰腿部连接件203,其中,带轮固定架212为等边三角形结构,等边三角形结构的一个角与第一大带轮204通过轴承转动连接,等边三角形结构的另外两个角分别与第一小带轮206、第二小带轮207通过轴承转动连接。腰腿部连接件203通过轴承同轴套设于外轴201的外部。在腰腿部连接件203与右端大腿连杆5之间设置有髋部挡圈202,髋部挡圈202同轴套设于外轴201,用于对右端大腿连杆5进行定位。
59.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。