一种腹腔镜手术机器人主控制台成像系统及瞳距调节方法
[技术领域]
[0001]
本发明属于手术机器人技术领域,具体地说是一种腹腔镜手术机器人主控制台成像系统及瞳距调节方法。
[
背景技术:
]
[0002]
传统的微创腹腔镜手术依赖于医生的操作精度,其可能出现治疗不彻底,术后出血,反复发作等现象。手术机器人与腹腔镜的结合,很好地解决了传统微创手术存在的问题。对于患者,手术机器人具有提高手术精度、术后恢复快、出血量少、愈合快等优点。对于操作者,手术机器人可以过滤手部颤抖,其操作符合人体工学,减少操作者的疲劳,使操作者精力更集中。
[0003]
目前市面上的微创手术机器人大多由医生控制台、患者平台及影像平台组成。医生控制台根据成像方式的不同,主要分为开放式控制台和暗箱式控制台。开放式控制台将主操作台与成像系统固定在一起,医生需佩戴3d眼镜来获取屏幕的三维图像,长时间的操作会带来疲惫感,且医生需要观察影像平台的二维图像时需要频繁的摘掉3d眼镜。暗箱式控制台将显示装置及观察窗口集成至医生控制台中,医生通过观察窗观察三维影像,无需佩戴显示设备;医生控制台可根据操作者的体型调节至符合人体工学的观察角度,增加手术时的沉浸式体验。然而,目前的暗箱式控制台缺少对瞳距及焦距调整的功能,并且操作者在长时间处于三维视角下容易产生疲劳,医生控制台的舒适性还有待提高。
[
技术实现要素:
]
[0004]
本发明的目的就是要解决上述的不足而提供一种腹腔镜手术机器人主控制台成像系统,使得操作者在手术过程中可将眼部瞳距及焦距调整至最佳状态,很大程度上缓解了长时间手术带来的疲劳感,提升了操作者的使用舒适感。
[0005]
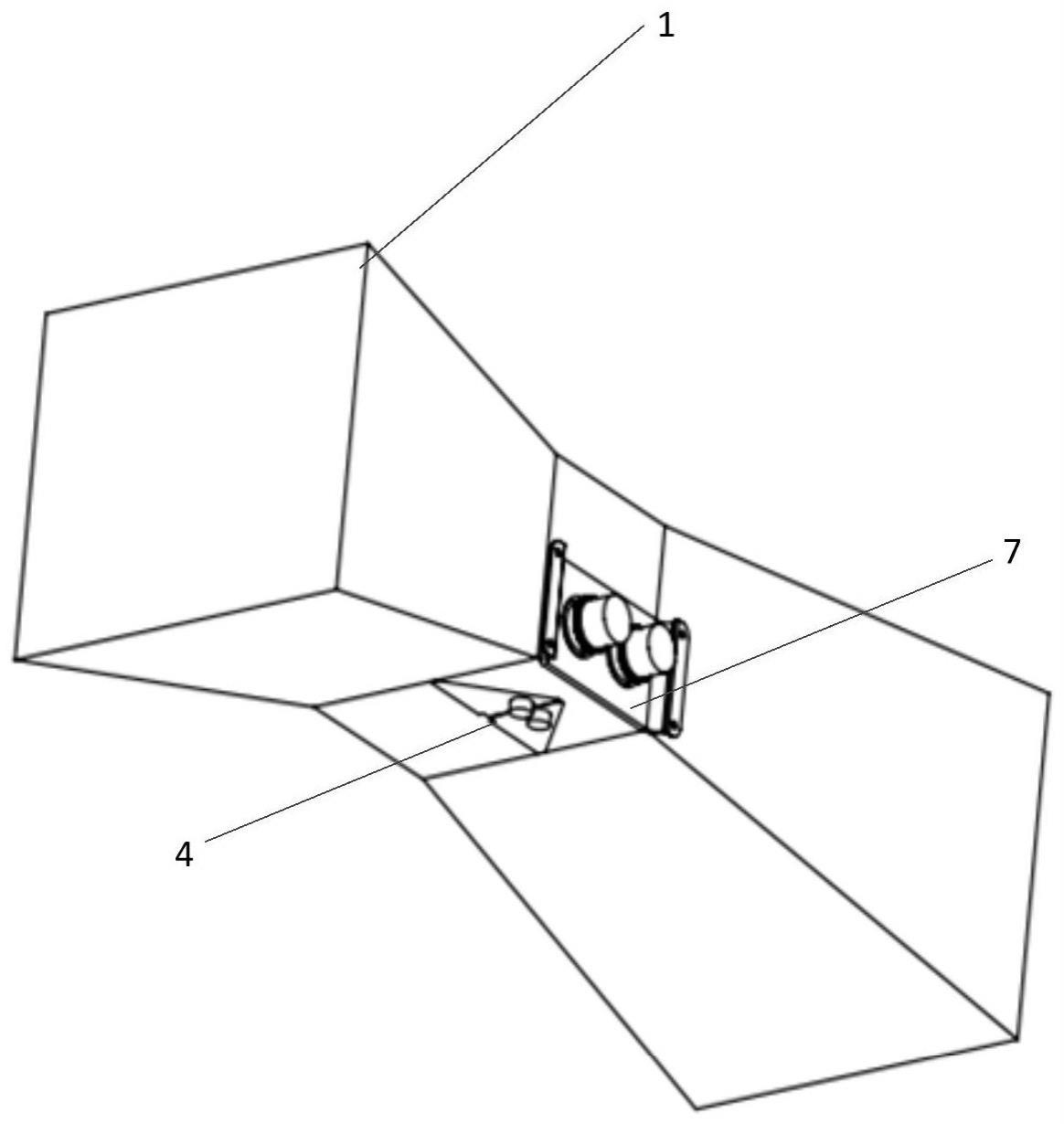
为实现上述目的设计一种腹腔镜手术机器人主控制台成像系统,包括显示装置、光路传递装置4、观察装置7以及暗箱1,所述显示装置固定于暗箱1内部的左右两侧,并呈左右对称式布置,所述显示装置用于获取手术时的图像并显示;所述光路传递装置4固定于暗箱1中间底部,所述光路传递装置4包括两路光路组件以及两个与光路组件对应布置的旋钮,两路光路组件均倾斜设置于显示装置的出光光路上,并通过镜面反射将显示装置显示的图像传递至观察装置7,两个旋钮用于调节光路组件的摆放角度以及调节光路组件与显示装置之间的距离;所述观察装置7固定于暗箱1前端,所述观察装置7用于观察光路传递装置4所成的虚像。
[0006]
进一步地,所述显示装置包括显示器一2和显示器二3,所述显示器一2与显示器二3分别固定于暗箱1左右两侧,并分别显示手术过程图像处理模块反馈回的两路图像;当显示模式为三维模式时,显示器一2与显示器二3分别显示两路具有横向视差的图像;当显示模式为二维模式时,显示器一2与显示器二3显示两路相同的二维图像。
[0007]
进一步地,所述光路传递装置4的两路光路组件分别为镜面一5和镜面二6,所述镜
面一5与镜面二6呈左右对称式分布,所述镜面一5用于接收显示器一2发送的第一路图像,并反射形成左侧光路虚像10l,所述镜面二6用于接收显示器二3发送的第二路图像,并反并射形成右侧光路虚像10r。
[0008]
进一步地,所述光路传递装置4的两个旋钮分别为左旋钮8和右旋钮9,所述左旋钮8与镜面一5相连,并用于调整镜面一5与显示器一2之间的距离以及调整镜面一5的角度;所述右旋钮9与镜面二6相连,并用于调整镜面二6与显示器二3之间的距离以及调整镜面二6的角度。
[0009]
进一步地,所述观察装置7用于接收左侧光路虚像10l及右侧光路虚像10r,所述观察装置7由透镜组合构成,所述观察装置7上设置有左侧焦距调整旋钮11和右侧焦距调整旋钮12,所述左侧焦距调整旋钮11用于调整左侧焦距,所述右侧焦距调整旋钮12用于调整右侧焦距。
[0010]
进一步地,所述左旋钮8、右旋钮9装设于光路传递装置4底部,所述左旋钮8使镜面一5沿平行于显示器一2法线方向平移的同时绕镜面一5右侧边框轴线旋转,所述右旋钮9使镜面二6沿平行于显示器二3法线方向平移的同时绕镜面二6左侧边框轴线旋转。
[0011]
进一步地,所述显示装置还包含图像处理模块,所述左侧光路虚像10l及右侧光路虚像10r通过图像处理模块进行图像角度补偿后,重合至虚像平面10内。
[0012]
进一步地,当显示设置为三维图像时,所述图像处理模块将两路具有横向视差的二维图像传递给显示器一2及显示器二3,并根据镜面一5及镜面二6的摆放角度调整图像,使得左侧光路虚像10l及右侧光路虚像10r在虚像平面10内重合;当显示设置为二维图像时,所述图像处理模块将内窥镜传递回的一路二维图像信息传递给显示器一2及显示器二3,并根据镜面一5及镜面二6的摆放角度调整图像,使得左侧光路虚像10l及右侧光路虚像10r在虚像平面10内重合。
[0013]
本发明还提供了一种腹腔镜手术机器人主控制台成像系统的瞳距调节方法,包括以下步骤:假设操作者需要调节的瞳距为m,首先,将镜面二6即平面abcd沿x轴平移m至平面a’b’c’d’即镜面r113,此时成像位置由初始点r0平移至r1;其次,将平面a’b’c’d’绕轴a’b’旋转α
°
至平面a’b’c”d”即镜面r214,通过改变光路入射角,使得成像位置到达r2,即r0与r1的重合点,从而实现所成虚像在适应操作者瞳距的同时保持成像位置不变。
[0014]
进一步地,所述瞳距调节方法包括以下具体步骤:
[0015]
假设右眼初始点r0坐标为(-a k,b),镜面二6初始角摆放位置为平行于z轴,垂直于xoy平面,且与x轴的夹角为45
°
;
[0016]
依据操作者的瞳距将镜面二6延x轴平移m,得到平移后的镜面r113,镜面r113在xoy平面内的投影为h1,在平移后经镜面r113反射回的虚像整体延x轴平移m,所成的像平移至点r1,为使所成的像回归至眼部观察位置r0,将镜面r113绕轴a’b’旋转角度α,将镜面r113旋转至镜面r214处,改变右侧光路经镜面r114的入射角,达到将成像点r1移动至r2,使得r2与r0重合,其中:
[0017]
镜面r214在xoy平面内的投影直线h2=tan(45
°‑
α)*(x-(-a m));
[0018]
h2与入射光线y=k的交点p的坐标为:
[0019]
可得直线pr2的表达式为:
[0020][0021]
由于调整后r2与r0重合,将点r0带入上式得:
[0022][0023]
解之得:
[0024][0025]
由于单眼瞳距调整范围在1mm至5mm之间,因此所求旋转角α为较小的角度,即α<45
°
,因此可得唯一解:
[0026][0027]
可得:
[0028]
其中k,b为定值。
[0029]
本发明同现有技术相比,具有如下优点:
[0030]
(1)本发明提供的成像系统包含具有三维及二维图像切换功能的显示装置、可进行瞳距调节的光路传递装置及可调节焦距的观察装置,能够在增加操作者沉浸式体验的同时,减少长时间手术带来的疲惫感;
[0031]
(2)本发明实现了操作者可在使用过程中将瞳距及焦距调整至舒适状态,并且在近距离观察手术组织时可调节至二维图像进行观察,缓解眼部疲劳;
[0032]
(3)本发明在给操作者带来沉浸式体验的同时,还具备目距调节、焦距调节功能,提升操作者的使用舒适感,同时还具备三维、二维画面切换的功能;
[0033]
综上,本发明既具备瞳距、焦距调节功能,又具备二维、三维视图切换功能,使得操作者在手术过程中可将眼部瞳距及焦距调整至最佳状态,很大程度上缓解了长时间手术带来的疲劳感。
[附图说明]
[0034]
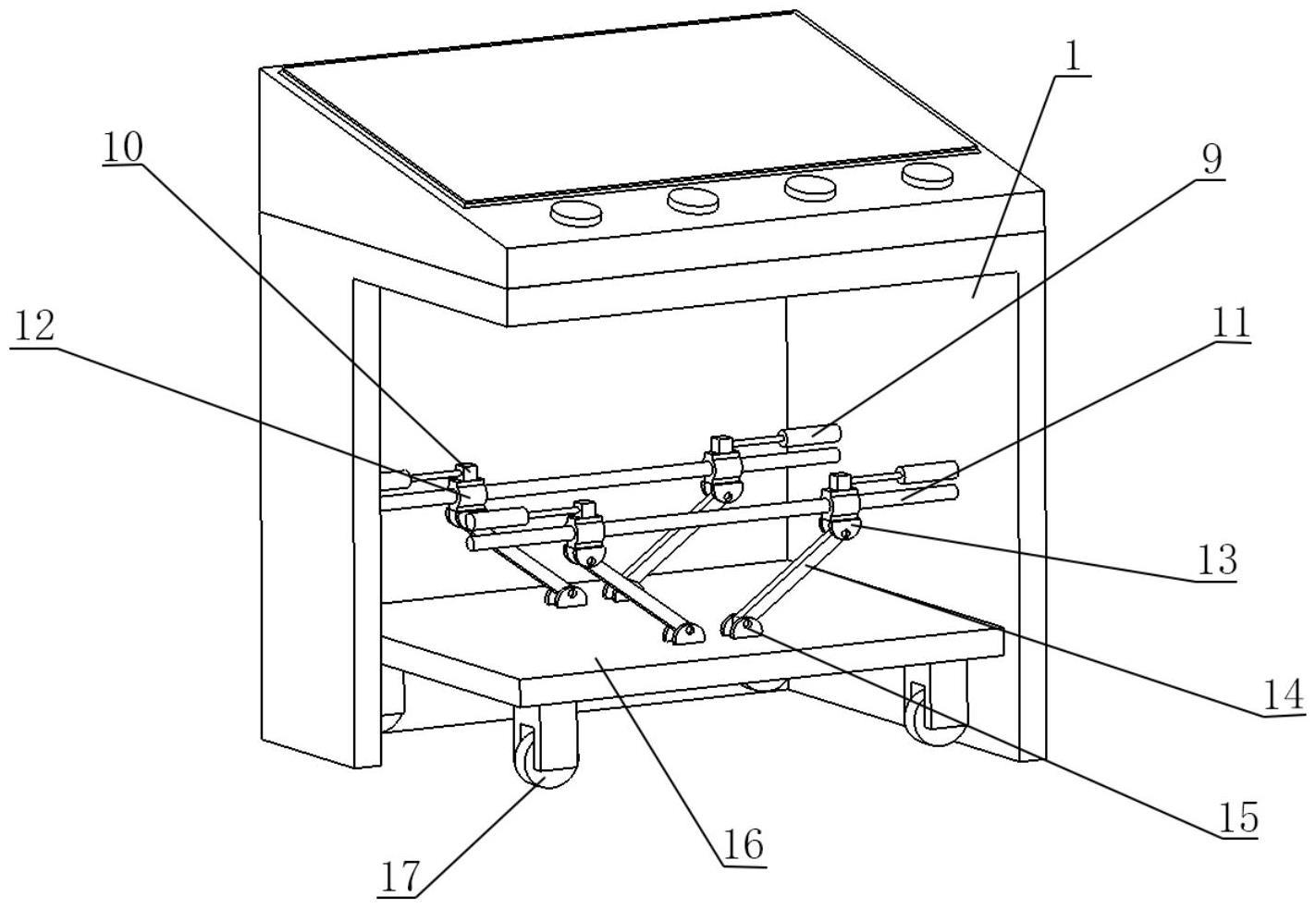
图1是本发明的结构示意图;
[0035]
图2是本发明成像系统的俯视图;
[0036]
图3是本发明成像系统的仰视图;
[0037]
图4是本发明成像系统的光路图;
[0038]
图5是本发明实施例中镜面调整示意图;
[0039]
图6是本发明实施例中镜面调整在xoy坐标系下的投影示意图;
[0040]
图7是本发明实施例中图像处理流程图;
[0041]
图中:1、暗箱;2、显示器一;3、显示器二;4、光路传递装置;5、镜面一;6、镜面二;7、观察装置;8、左旋钮;9、右旋钮;10、虚像平面;10l、左侧光路虚像;10r、右侧光路虚像;11、左侧焦距调整旋钮;12、右侧焦距调整旋钮;13、镜面r1;14、镜面r2;15、右眼初始点r0坐标。
[具体实施方式]
[0042]
本发明涉及一种用于手术机器人医生控制台的沉浸式成像系统,具体的说是一种结合了瞳距调节算法的腹腔镜手术机器人主控制台暗箱式成像系统。该腹腔镜手术机器人主控制台成像系统,包括显示装置、光路传递装置4、观察装置7以及暗箱1,显示装置固定于暗箱1内部的左右两侧,并呈左右对称式布置,显示装置用于获取手术时的图像并显示;光路传递装置4固定于暗箱1中间底部,光路传递装置4包括两路光路组件以及两个与光路组件对应布置的旋钮,两路光路组件均倾斜设置于显示装置的出光光路上,并通过镜面反射将显示装置显示的图像传递至观察装置7即医生观察端,两个旋钮用于调节光路组件的摆放角度以及调节光路组件与显示装置之间的距离,从而可实现观察端瞳距的调整;观察装置7固定于暗箱1前端,观察装置7用于观察光路传递装置4所成的虚像,其具备焦距调节功能,便于不同近视程度的操作者使用。
[0043]
其中,显示装置包括显示器一2和显示器二3,显示器一2与显示器二3分别固定于暗箱1左右两侧,呈对称式分布,并分别显示手术过程图像处理模块反馈回的两路图像;当显示模式为三维模式时,显示器一2与显示器二3分别显示两路具有横向视差的图像;当显示模式为二维模式时,显示器一2与显示器二3显示两路相同的二维图像。
[0044]
光路传递装置4的两路光路组件分别为镜面一5和镜面二6,镜面一5与镜面二6呈左右对称式分布,镜面一5用来接收显示器一2发送的第一路图像,并反射形成左侧光路虚像10l,镜面二6接收显示器二3发送的第二路图像,并反并射形成右侧光路虚像10r。光路传递装置4的两个旋钮分别为左旋钮8和右旋钮9,左旋钮8与镜面一5相连,并用于调整镜面一5与显示器一2之间的距离以及调整镜面一5的角度;同样的,右旋钮9与镜面二6相连,并用于调整镜面二6与显示器二3之间的距离以及调整镜面二6的角度;通过对镜面之间的距离及摆放角度的调整,可实现调整瞳距的同时,保证接收到的画面范围不发生变化。具体地,左旋钮8、右旋钮9装设于光路传递装置4底部,左旋钮8使镜面一5沿平行于显示器一2法线方向平移的同时绕镜面一5右侧边框轴线旋转,右旋钮9使镜面二6沿平行于显示器二3法线方向平移的同时绕镜面二6左侧边框轴线旋转。
[0045]
观察装置7用于接收左侧光路虚像10l及右侧光路虚像10r,观察装置7由透镜组合构成,其具备焦距调节功能,观察装置7上设置有左侧焦距调整旋钮11和右侧焦距调整旋钮12,左侧焦距调整旋钮11用于调整左侧焦距,右侧焦距调整旋钮12用于调整右侧焦距,从而使用时,观察者通过左侧焦距调整旋钮11调整左眼焦距,通过右侧焦距调整旋钮12调整右侧焦距。
[0046]
可选的,显示装置还包含图像处理模块,左侧光路虚像10l及右侧光路虚像10r通过图像处理模块进行图像角度补偿后,重合至虚像平面10内。具体地,当显示设置为三维图像时,图像处理模块将两路具有横向视差的二维图像传递给显示器一2及显示器二3,并根据镜面一5及镜面二6的摆放角度调整图像,使得左侧光路虚像10l及右侧光路虚像10r在虚像平面10内重合;当显示设置为二维图像时,图像处理模块将内窥镜传递回的一路二维图像信息传递给显示器一2及显示器二3,并根据镜面一5及镜面二6的摆放角度调整图像,使得左侧光路虚像10l及右侧光路虚像10r在虚像平面10内重合。
[0047]
下面结合附图和具体实施例对本发明作以下进一步说明:
[0048]
附图1为本发明实施例暗箱式装置的示意图。在暗箱1中包含显示模块,即显示器
一2、显示器二3分别装在暗箱内部的左侧和右侧,光路传递装置4位于暗箱中间底部,观察装置8位于暗箱前端。
[0049]
附图2所示为暗箱内部各个模块摆放位置俯视图,附图4为本发明实施例中成像系统光路示意图,附图7为本发明实施例中图像处理流程图,当显示转态为三维模式时,图像处理模块将内窥镜信号中两路具有横向二维视差的图像分别传递给显示器一2及显示器二3,镜面一5将显示器一2的图像通过虚像的形式传递至观察装置8的左眼位置,镜面二6将显示器二3的图像通过虚像的形式传递至观察装置8的右眼位置。所成的两路虚像,左侧光路虚像10l、右侧光路虚像10r通过图像处理模块进行图像角度补偿后,重合至虚像平面10内。操作者通过接收观察装置8左右两边两幅具有横向视差的虚像,在脑部形成三维图像。当显示状态切换为二维图像时,图像处理模块将内窥镜信号中的一路二维图像分别传递给显示器一2及显示器二3,同样的,经镜面一5及镜面二6所成的两路虚像经图像处理模块进行图像角度补偿后,重合至虚像平面10内,相应的观察装置8左右两侧接收相同的虚像,操作者在脑部形成二维图像。
[0050]
附图3所示为暗箱内部各个模块摆放位置仰视图。可见的,在光路传递装置4的底部装有镜面调整旋钮,即左旋钮8及右旋钮9。左旋钮8可使镜面一5沿平行于显示器一2法线方向平移的同时绕镜面一5右侧边框轴线旋转。类似的,右旋钮9可使镜面二6沿平行于显示器二3法线方向平移的同时绕镜面二6左侧边框轴线旋转。通过调整左旋钮8及右旋钮9,可达到调整所成虚像适应不同操作者瞳距的目的。当操作者需要调节焦距以适应不同的近视度数时,可通过左侧焦距调整旋钮11及左侧焦距调整旋钮12调整至适当的度数。
[0051]
附图5所示为镜面调整示意图。以右眼为例,假设操作者需要调节的瞳距为m,由于观察装置8位置固定不变,因此需要所成虚像在适应操作者瞳距的同时保持成像位置不变。首先,将镜面二6及图5中平面abcd沿x轴平移m至平面a’b’c’d’即镜面r113,此时成像位置由初始点r0平移至r1。其次,将平面a’b’c’d’绕轴a’b’旋转α
°
至平面a’b’c”d”即镜面r214,通过改变光路入射角,使得成像位置到达r2,即r0与r1的重合点。附图6为附图5在xoy面内的投影示意图,下面结合附图5详细说明。
[0052]
如附图5所示,假设右眼初始点r0坐标15:(-a k,b),镜面二6初始角摆放位置为平行于z轴,垂直于xoy平面,且与x轴的夹角为45
°
。
[0053]
依据操作者的瞳距将镜面二6延x轴平移m,得到平移后的镜面r113,镜面r113在xoy平面内的投影为h1,在平移后经镜面r113反射回的虚像整体延x轴平移m,所成的像平移至点r1,为使所成的像回归至眼部观察位置r0,需将镜面r113绕轴a’b’旋转角度α,将镜面r113旋转至镜面r214处,改变右侧光路经镜面r114的入射角,达到将成像点r1移动至r2,使得r2与r0重合。
[0054]
其中:镜面r214在xoy平面内的投影直线h2=tan(45
°‑
α)*(x-(-a m))
[0055]
h2与入射光线:y=k的交点p:
[0056]
可得直线pr2的表达式为:
[0057][0058]
由于调整后r2与r0重合,将点r0带入上式得:
[0059][0060]
解之得:
[0061][0062]
由于单眼瞳距调整范围在1mm至5mm之间,因此所求旋转角α为较小的角度,即α《45
°
,因此可得唯一解:
[0063][0064]
可得:
[0065]
其中k,b为定值。
[0066]
可见,通过延x轴平移镜面二6,以及绕轴a’b’旋转对应的角度α,可在调整瞳距的同时不改变眼部接收的虚像位置。
[0067]
进一步的,还可将右按钮9设置为五档调整模式,即旋转至对应的档位可调整镜面二6移动对应距离,并使镜面二6绕镜面左边框轴旋转对应的角度,依据本实施例中机构的尺寸设置k=300mm,b=100mm,计算得出各档位对应的镜面平移距离及镜面旋转角度如下表所示:
[0068][0069]
同样的,左侧镜面调整方式以及左旋钮8的设置方式与上述方法类似,不再赘述。
[0070]
综上所述,本实施例描述的腹腔镜医生控制台成像系统是一种既具备瞳距、焦距调节功能,又具备二维、三维视图切换功能的暗箱式成像系统。操作者在手术过程中可将眼部瞳距及焦距调整至最佳状态,很大程度上缓解了长时间手术带来的疲劳感。
[0071]
本发明并不受上述实施方式的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。