技术特征:
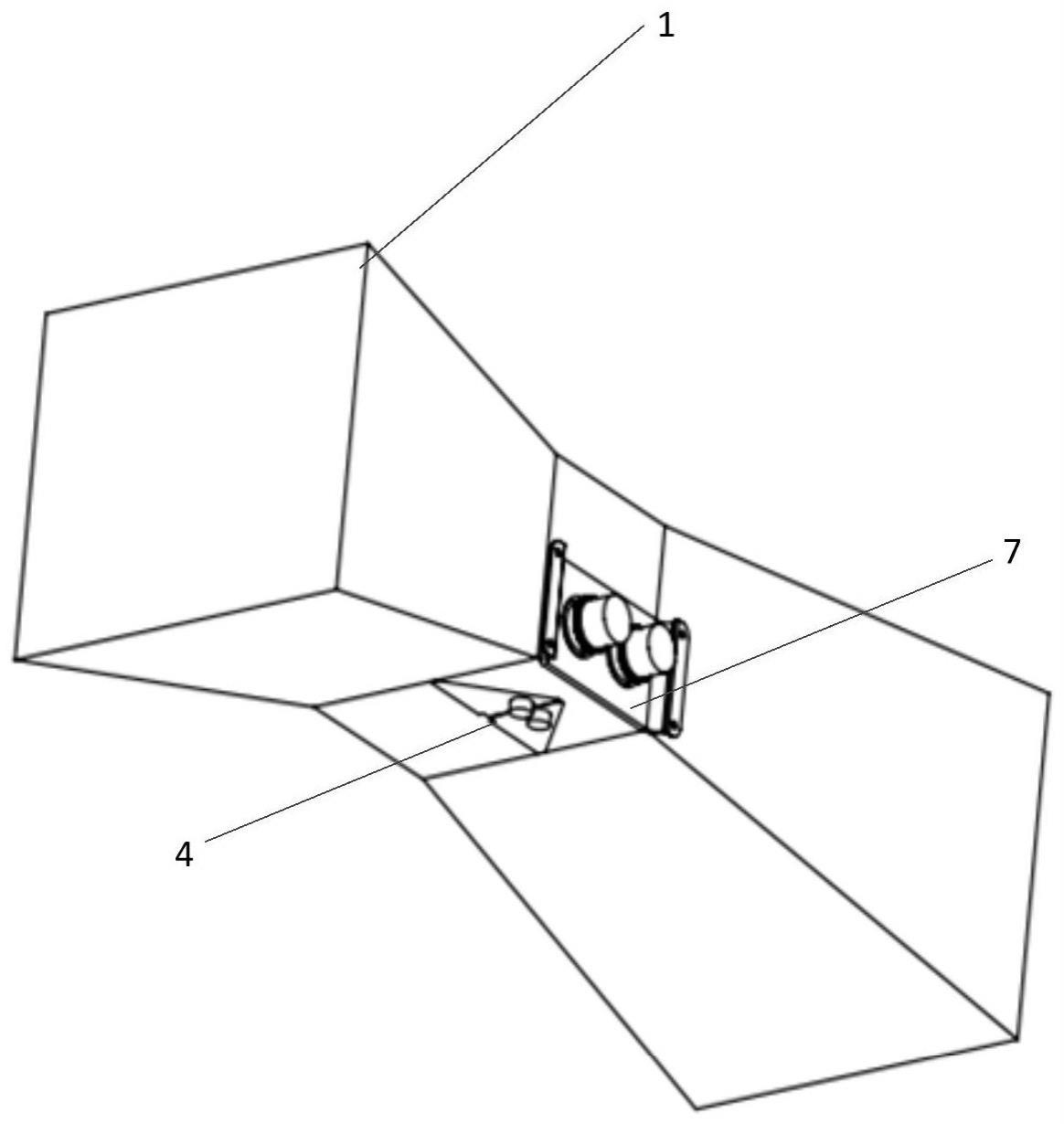
1.一种腹腔镜手术机器人主控制台成像系统,其特征在于:包括显示装置、光路传递装置(4)、观察装置(7)以及暗箱(1),所述显示装置固定于暗箱(1)内部的左右两侧,并呈左右对称式布置,所述显示装置用于获取手术时的图像并显示;所述光路传递装置(4)固定于暗箱(1)中间底部,所述光路传递装置(4)包括两路光路组件以及两个与光路组件对应布置的旋钮,两路光路组件均倾斜设置于显示装置的出光光路上,并通过镜面反射将显示装置显示的图像传递至观察装置(7),两个旋钮用于调节光路组件的摆放角度以及调节光路组件与显示装置之间的距离;所述观察装置(7)固定于暗箱(1)前端,所述观察装置(7)用于观察光路传递装置(4)所成的虚像。2.如权利要求1所述的腹腔镜手术机器人主控制台成像系统,其特征在于:所述显示装置包括显示器一(2)和显示器二(3),所述显示器一(2)与显示器二(3)分别固定于暗箱(1)左右两侧,并分别显示手术过程图像处理模块反馈回的两路图像;当显示模式为三维模式时,显示器一(2)与显示器二(3)分别显示两路具有横向视差的图像;当显示模式为二维模式时,显示器一(2)与显示器二(3)显示两路相同的二维图像。3.如权利要求1所述的腹腔镜手术机器人主控制台成像系统,其特征在于:所述光路传递装置(4)的两路光路组件分别为镜面一(5)和镜面二(6),所述镜面一(5)与镜面二(6)呈左右对称式分布,所述镜面一(5)用于接收显示器一(2)发送的第一路图像,并反射形成左侧光路虚像(10l),所述镜面二(6)用于接收显示器二(3)发送的第二路图像,并反并射形成右侧光路虚像(10r)。4.如权利要求3所述的腹腔镜手术机器人主控制台成像系统,其特征在于:所述光路传递装置(4)的两个旋钮分别为左旋钮(8)和右旋钮(9),所述左旋钮(8)与镜面一(5)相连,并用于调整镜面一(5)与显示器一(2)之间的距离以及调整镜面一(5)的角度;所述右旋钮(9)与镜面二(6)相连,并用于调整镜面二(6)与显示器二(3)之间的距离以及调整镜面二(6)的角度。5.如权利要求3所述的腹腔镜手术机器人主控制台成像系统,其特征在于:所述观察装置(7)用于接收左侧光路虚像(10l)及右侧光路虚像(10r),所述观察装置(7)由透镜组合构成,所述观察装置(7)上设置有左侧焦距调整旋钮(11)和右侧焦距调整旋钮(12),所述左侧焦距调整旋钮(11)用于调整左侧焦距,所述右侧焦距调整旋钮(12)用于调整右侧焦距。6.如权利要求4所述的腹腔镜手术机器人主控制台成像系统,其特征在于:所述左旋钮(8)、右旋钮(9)装设于光路传递装置(4)底部,所述左旋钮(8)使镜面一(5)沿平行于显示器一(2)法线方向平移的同时绕镜面一(5)右侧边框轴线旋转,所述右旋钮(9)使镜面二(6)沿平行于显示器二(3)法线方向平移的同时绕镜面二(6)左侧边框轴线旋转。7.如权利要求1所述的腹腔镜手术机器人主控制台成像系统,其特征在于:所述显示装置还包含图像处理模块,所述左侧光路虚像(10l)及右侧光路虚像(10r)通过图像处理模块进行图像角度补偿后,重合至虚像平面(10)内。8.如权利要求6所述的腹腔镜手术机器人主控制台成像系统,其特征在于:当显示设置为三维图像时,所述图像处理模块将两路具有横向视差的二维图像传递给显示器一(2)及显示器二(3),并根据镜面一(5)及镜面二(6)的摆放角度调整图像,使得左侧光路虚像(10l)及右侧光路虚像(10r)在虚像平面(10)内重合;当显示设置为二维图像时,所述图像处理模块将内窥镜传递回的一路二维图像信息传递给显示器一(2)及显示器二(3),并根据
镜面一(5)及镜面二(6)的摆放角度调整图像,使得左侧光路虚像(10l)及右侧光路虚像(10r)在虚像平面(10)内重合。9.一种如权利要求1至8中任一项所述的腹腔镜手术机器人主控制台成像系统的瞳距调节方法,其特征在于,包括以下步骤:假设操作者需要调节的瞳距为m,首先,将镜面二(6)即平面abcd沿x轴平移m至平面a’b’c’d’即镜面r1(13),此时成像位置由初始点r0平移至r1;其次,将平面a’b’c’d’绕轴a’b’旋转α
°
至平面a’b’c”d”即镜面r2(14),通过改变光路入射角,使得成像位置到达r2,即r0与r1的重合点,从而实现所成虚像在适应操作者瞳距的同时保持成像位置不变。10.如权利要求9所述的瞳距调节方法,其特征在于,包括以下步骤:假设右眼初始点r0坐标为(-a k,b),镜面二(6)初始角摆放位置为平行于z轴,垂直于xoy平面,且与x轴的夹角为45
°
;依据操作者的瞳距将镜面二(6)延x轴平移m,得到平移后的镜面r1(13),镜面r1(13)在xoy平面内的投影为h1,在平移后经镜面r1(13)反射回的虚像整体延x轴平移m,所成的像平移至点r1,为使所成的像回归至眼部观察位置r0,将镜面r1(13)绕轴a’b’旋转角度α,将镜面r1(13)旋转至镜面r2(14)处,改变右侧光路经镜面r1(14)的入射角,达到将成像点r1移动至r2,使得r2与r0重合,其中:镜面r2(14)在xoy平面内的投影直线h2=tan(45
°‑
α)*(x-(-a m));h2与入射光线y=k的交点p的坐标为:可得直线pr2的表达式为:由于调整后r2与r0重合,将点r0带入上式得:解之得:由于单眼瞳距调整范围在1mm至5mm之间,因此所求旋转角α为较小的角度,即α<45
°
,因此可得唯一解:可得:其中k,b为定值。
技术总结
本发明涉及一种腹腔镜手术机器人主控制台成像系统及瞳距调节方法,该成像系统包括显示装置、光路传递装置、观察装置以及暗箱,显示装置固定于暗箱内部左右两侧并对称式布置,显示装置用于获取手术时的图像并显示;光路传递装置固定于暗箱中间底部,光路传递装置包括两路光路组件以及两个与其对应布置的旋钮,两路光路组件均倾斜设置于显示装置的出光光路上,并通过镜面反射将显示装置显示的图像传递至观察装置,两个旋钮用于调节光路组件的摆放角度以及调节光路组件与显示装置之间的距离;观察装置固定于暗箱前端,观察装置用于观察光路传递装置所成的虚像;本发明很大程度上缓解了长时间手术带来的疲劳感,提升了操作者的使用舒适感。舒适感。舒适感。
技术研发人员:陈宇星 张锐浩
受保护的技术使用者:上海睿触科技有限公司
技术研发日:2023.06.06
技术公布日:2023/8/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。