1.本发明涉及电力系统技术领域,并且更具体地,涉及一种用于电力系统风电场的动态聚合方法及系统。
背景技术:
2.为了有效应对日益严重的能源及环境问题,风力发电在世界各国发展迅速。随着大量并网风场对电力系统稳定性的影响逐渐增大,风场动态聚合模型越来越受到重视。现有风场内各机组的频率、电压动态过程各异,风场聚合模型通常只能基于稳态输出功率进行等值,缺乏有效的动态过程聚合机制。由于风场通常由大量风机并联汇流而成,各台机组间的空间分布性和控制差异性较明显,为了避免系统的阶数及非线性度过高,在研究并网风场对电力系统的影响时需要对并联机组进行等值建模。现有风场内各机组的频率、电压动态过程各异,风场聚合模型通常只能基于稳态输出功率进行等值,缺乏有效的动态过程聚合机制。
技术实现要素:
3.针对上述问题,本发明提出了一种用于电力系统风电场的动态聚合方法,包括:
4.针对电力系统风场基于虚拟同步型风机,确定虚拟同步型风机的控制策略,根据所述控制策略,确定电力系统风电场的风机机电方程;
5.对所述风机机电方程进行聚合,以获取聚合风机机电方程模型;
6.将电力系统分布式风轮机作为电力系统风电场的同步发电机组的原动机,并基于所述聚合风机机电方程模型对电力系统分布式风轮机做等值处理,以确定电力系统分布式风轮机的等效惯量模型;
7.基于所述等效惯量模型,以进行电力系统风电场的动态聚合。
8.可选的,根据所述控制策略,确定电力系统风电场的风机机电方程,包括:
9.根据所述控制策略,构建电力系统风电场架构及聚合模型;
10.基于所述电力系统风电场架构及聚合模型,确定电力系统风电场的风机机电方程。
11.可选的,风机机电方程,包括:阻抗匹配方程,聚合风电场汇流母线电压方程和聚合风电场等效同步电抗方程。
12.可选的,聚合风机机电方程模型,包括:
[0013][0014]
其中,αa为聚合后等效角加速度,n为风机台数,2≤h≤n,ph为第h台风机的有功功率,为归一化后的虚拟惯量,为第h台风机机械转矩,为第h台风机电磁功率,ωa为角频率,
△
ωa为聚合后等效角频率变化率。
[0015]
可选的,等效惯量模型,如下:
[0016][0017]
其中,jw为等效惯量,hw为等效惯量时间常数,sn为系统容量、fn为额定频率,p为转子极对数。
[0018]
可选的,基于所述等效惯量模型,以进行电力系统风电场的动态聚合,包括:将电力系统风电场的等效风速,表征为电力系统风电场当前所能吸收的风能,并将所述风能作为等效惯量的输入变量,将所述输入变量输入至等效惯量模型进行计算,以确定电力系统分布式风轮机的等效惯量,基于确定的等效惯量对电力系统风电场进行调整,以进行电力系统风电场的动态聚合。
[0019]
再一方面,本发明还提出了一种用于电力系统风电场的动态聚合系统,包括:
[0020]
第一计算单元,用于针对电力系统风场基于虚拟同步型风机,确定虚拟同步型风机的控制策略,根据所述控制策略,确定电力系统风电场的风机机电方程;
[0021]
第二计算单元,用于对所述风机机电方程进行聚合,以获取聚合风机机电方程模型;
[0022]
第三计算单元,用于将电力系统分布式风轮机作为电力系统风电场的同步发电机组的原动机,并基于所述聚合风机机电方程模型对电力系统分布式风轮机做等值处理,以确定电力系统分布式风轮机的等效惯量模型;
[0023]
聚合单元,用于基于所述等效惯量模型,以进行电力系统风电场的动态聚合。
[0024]
可选的,根据所述控制策略,确定电力系统风电场的风机机电方程,包括:
[0025]
根据所述控制策略,构建电力系统风电场架构及聚合模型;
[0026]
基于所述电力系统风电场架构及聚合模型,确定电力系统风电场的风机机电方程。
[0027]
可选的,风机机电方程,包括:阻抗匹配方程,聚合风电场汇流母线电压方程和聚合风电场等效同步电抗方程。
[0028]
可选的,聚合风机机电方程模型,包括:
[0029][0030]
其中,αa为聚合后等效角加速度,n为风机台数,2≤h≤n,ph为第h台风机的有功功率,为归一化后的虚拟惯量,为第h台风机机械转矩,为第h台风机电磁功率,ωa为角频率,
△
ωa为聚合后等效角频率变化率。
[0031]
可选的,等效惯量模型,如下:
[0032][0033]
其中,jw为等效惯量,hw为等效惯量时间常数,sn为系统容量、fn为额定频率,p为转子极对数。
[0034]
可选的,基于所述等效惯量模型,以进行电力系统风电场的动态聚合,包括:将电
力系统风电场的等效风速,表征为电力系统风电场当前所能吸收的风能,并将所述风能作为等效惯量的输入变量,将所述输入变量输入至等效惯量模型进行计算,以确定电力系统分布式风轮机的等效惯量,基于确定的等效惯量对电力系统风电场进行调整,以进行电力系统风电场的动态聚合。
[0035]
再一方面,本发明还提供了一种计算设备,包括:一个或多个处理器;
[0036]
处理器,用于执行一个或多个程序;
[0037]
当所述一个或多个程序被所述一个或多个处理器执行时,实现如上述所述的方法。
[0038]
再一方面,本发明还提供了一种计算机可读存储介质,其上存有计算机程序,所述计算机程序被执行时,实现如上述所述的方法。
[0039]
与现有技术相比,本发明的有益效果为:
[0040]
本发明提出了一种用于电力系统风电场的动态聚合方法,包括:针对电力系统风场基于虚拟同步型风机,确定虚拟同步型风机的控制策略,根据所述控制策略,确定电力系统风电场的风机机电方程;对所述风机机电方程进行聚合,以获取聚合风机机电方程模型;将电力系统分布式风轮机作为电力系统风电场的同步发电机组的原动机,并基于所述聚合风机机电方程模型对电力系统分布式风轮机做等值处理,以确定电力系统分布式风轮机的等效惯量模型;基于所述等效惯量模型,以进行电力系统风电场的动态聚合。本发明为风场依据传统电力系统进行动态聚合提供了控制基础,同时聚合后的风场模型阶数及物理特征与传统同步电机相接近,增强了电力电子型电源与以同步机为主导的电力系统的融合性。
附图说明
[0041]
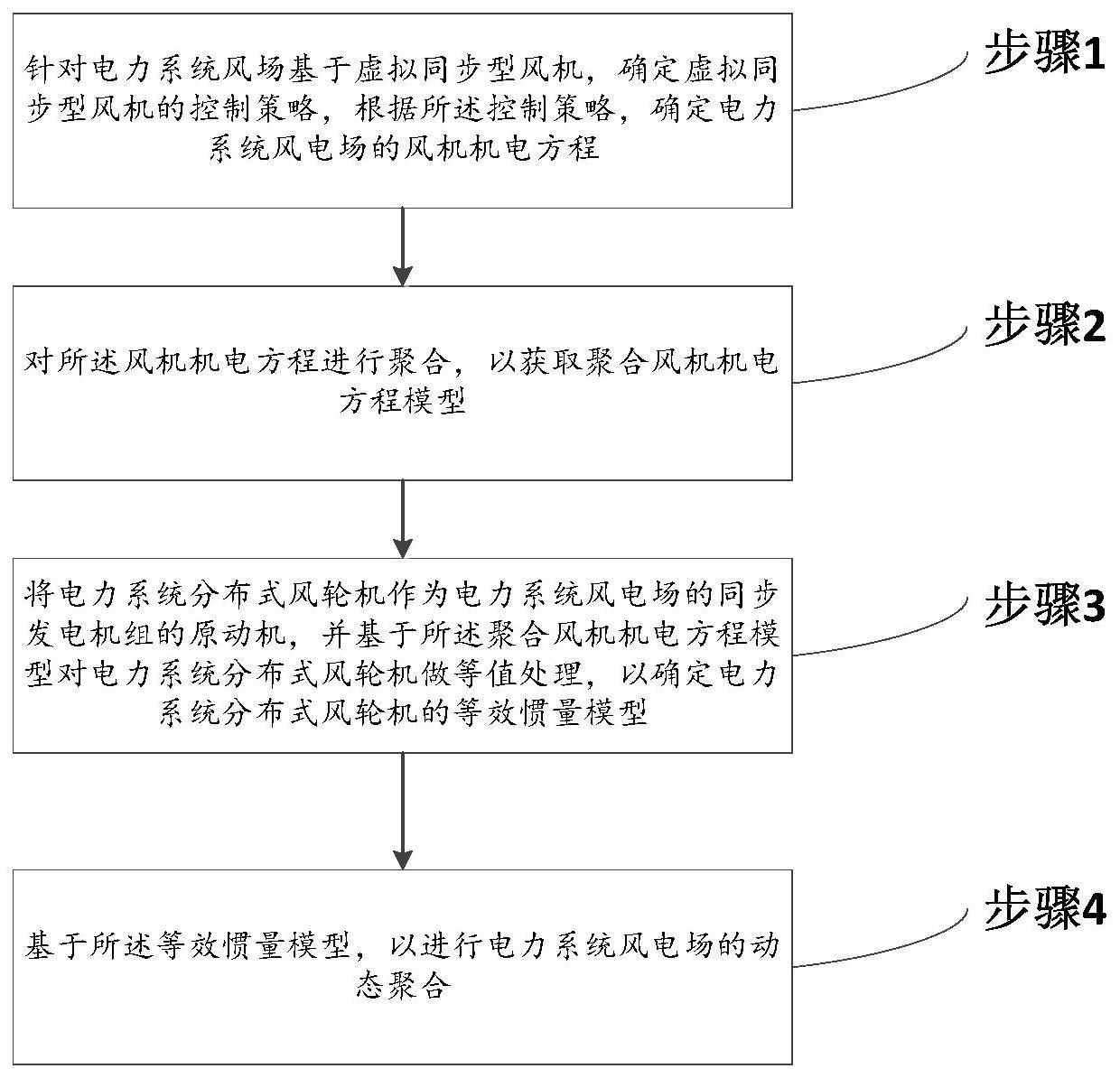
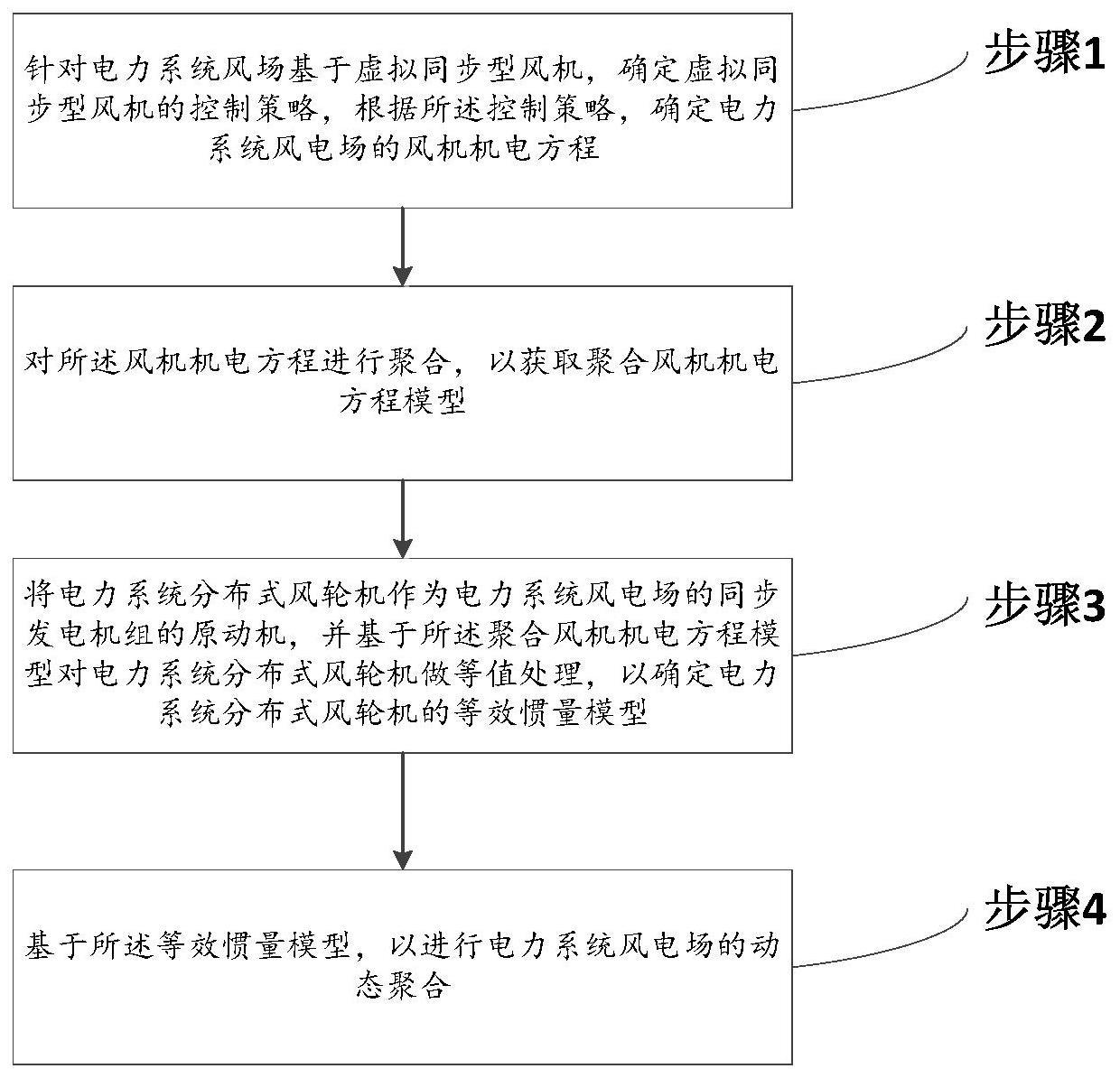
图1为本发明方法的流程图;
[0042]
图2为本发明虚拟同步型风机控制策略示意图;
[0043]
图3为本发明风电场架构及聚合模型;
[0044]
图4(a)-(b)为本发明2台风机实际模型和动态聚合模型的对比示意图;
[0045]
图5为本发明短期风速曲线图;
[0046]
图6(a)-(b)为本发明33台风机实际模型和动态聚合模型的对比示意图;
[0047]
图7为本发明系统的结构图。
具体实施方式
[0048]
现在参考附图介绍本发明的示例性实施方式,然而,本发明可以用许多不同的形式来实施,并且不局限于此处描述的实施例,提供这些实施例是为了详尽地且完全地公开本发明,并且向所属技术领域的技术人员充分传达本发明的范围。对于表示在附图中的示例性实施方式中的术语并不是对本发明的限定。在附图中,相同的单元/元件使用相同的附图标记。
[0049]
除非另有说明,此处使用的术语(包括科技术语)对所属技术领域的技术人员具有通常的理解含义。另外,可以理解的是,以通常使用的词典限定的术语,应当被理解为与其相关领域的语境具有一致的含义,而不应该被理解为理想化的或过于正式的意义。
[0050]
实施例1:
[0051]
本发明提出了一种用于电力系统风电场的动态聚合方法,如图1所示,包括:
[0052]
步骤1、针对电力系统风场基于虚拟同步型风机,确定虚拟同步型风机的控制策略,根据所述控制策略,确定电力系统风电场的风机机电方程;
[0053]
步骤2、对所述风机机电方程进行聚合,以获取聚合风机机电方程模型;
[0054]
步骤3、将电力系统分布式风轮机作为电力系统风电场的同步发电机组的原动机,并基于所述聚合风机机电方程模型对电力系统分布式风轮机做等值处理,以确定电力系统分布式风轮机的等效惯量模型;
[0055]
步骤4、基于所述等效惯量模型,以进行电力系统风电场的动态聚合。
[0056]
其中,根据所述控制策略,确定电力系统风电场的风机机电方程,包括:
[0057]
根据所述控制策略,构建电力系统风电场架构及聚合模型;
[0058]
基于所述电力系统风电场架构及聚合模型,确定电力系统风电场的风机机电方程。
[0059]
其中,风机机电方程,包括:阻抗匹配方程,聚合风电场汇流母线电压方程和聚合风电场等效同步电抗方程。
[0060]
其中,聚合风机机电方程模型,包括:
[0061][0062]
其中,αa为聚合后等效角加速度,n为风机台数,2≤h≤n,ph为第h台风机的有功功率,为归一化后的虚拟惯量,为第h台风机机械转矩,为第h台风机电磁功率,ωa为角频率,
△
ωa为聚合后等效角频率变化率。
[0063]
其中,等效惯量模型,如下:
[0064][0065]
其中,jw为等效惯量,hw为等效惯量时间常数,sn为系统容量、fn为额定频率,p为转子极对数。
[0066]
其中,基于所述等效惯量模型,以进行电力系统风电场的动态聚合,包括:将电力系统风电场的等效风速,表征为电力系统风电场当前所能吸收的风能,并将所述风能作为等效惯量的输入变量,将所述输入变量输入至等效惯量模型进行计算,以确定电力系统分布式风轮机的等效惯量,基于确定的等效惯量对电力系统风电场进行调整,以进行电力系统风电场的动态聚合。
[0067]
下面结合具体实施例对本发明进行进一步的说明:
[0068]
实施例,包括如下:
[0069]
步骤1:确定虚拟同步机的虚拟同步机控制策略,如图2所示,其中js为虚拟同步控制的虚拟惯量常数,d
p
为虚拟阻尼常数。令各台风机在各自的最大功率点跟踪mppt控制下的功率指令值p
t
作为基准值,虚拟惯量常数标幺值j
s*
和虚拟阻尼常数标幺值d
p*
,设置各机组的阻尼惯量比d
p*
/j
s*
相等。
[0070]
步骤2:提出基于vsg控制策略的风电场电压方程、同步电抗聚合方法
[0071]
步骤2.1构建风场架构及其聚合模型;
[0072]
由n台机组并联汇流成的混合型风场可聚合成为一台与具备同步发电机动态外特性的风力机组,n台风机模型及其聚合模型示意图,如图3所示。其中各台风机机端等效阻抗xs为机组虚拟阻抗、实际输出阻抗和箱变等效阻抗之和,x
l
为每台机组对应的汇流线阻抗,eo为各风机的机端内电势。
[0073]
步骤2.2通过阻抗匹配公式逐个判断第h-1(2≤h≤n)个汇流点的电压聚合性,对于不满足聚合性的节点h-1,通过调节第h台风机的虚拟阻抗改变x
sh
,使各机组满足并联机组阻抗匹配公式,阻抗匹配公式为:
[0074][0075]
其中,p
h-1
和ph(2≤h≤n)分别表示第h-1和第h个机组输出的有功功率。
[0076]
步骤2.3计算聚合风电场汇流母线的电压u
pcc
,计算公式为:
[0077][0078]
其中ih(1≤h≤n)为第h台风机的出口电流,e
oh
(1≤h≤n)为第h台风机的机端内电势。
[0079]
步骤2.4计算聚合风电场等效同步电抗x
sa
,计算公式为:
[0080][0081]
步骤3:进行vsg风机机电方程的聚合
[0082]
步骤3.1在动态功率标幺系统下,各台虚拟同步型控制的机组频率特征可由其vsg模型中的机电方程表示:
[0083][0084][0085]
……
[0086][0087]
其中为机械转矩,为电磁转矩,各台机组角加速度αi(1≤i≤n)以及相同时间内的频率变化率δωi(1≤i≤n)相等:
[0088]
α1=α2=
…
=αn=αa[0089]
△
ω1=
△
ω2=
…
=
△
ωn=
△
ωa[0090]
其中αa和δωa分别为聚合后等效角加速度和频率变化率。
[0091]
步骤3.2将采用vsg控制的各台风机的机电方程用聚合模型表示:
[0092][0093]
步骤4在步骤1-3聚合模型的基础上对分布式风轮机做等值,并将其作为同步发电机组的原动机。分布式风轮机等效惯量如下:
[0094][0095]
其中hw为等效惯量时间常数,sn为系统容量、fn为额定频率,p为转子极对数。风轮机在系统中主要决定最大功率点跟踪控制的闭环时间,包含风速扰动过程中的功率跟随以及网侧扰动后最大功率点跟踪控制恢复过程。最后用等效风速表征风场当前所能吸收的风能,并作为等效风轮机的输入变量。
[0096]
以风机的pwm平均模型为基础,构成小型汇流网络,验证上述聚合方法对2台风电机组和33台风电机组的并网功率的动态聚合效果。
[0097]
案例1:2台风电机组动态聚合
[0098]
设两台1.5mw经两段汇流线路接入系统,其中1号为pmsg型风机,2号为dfig型风机,均采用vsg模型。在相同工况下用一台额定功率为3mw的实际同步发电机来表征上述2台采用pwm平均模型的虚拟同步型风电机组。仿真中2s时1号机组和2号机组的对应风速分别从9m/s和8.8m/s上升至9.5m/s和9.2m/s。2s时负载突增5%,12s时负载恢复。实际模型和动态聚合模型的并网功率和系统频率如图4所示,4(a)为并网功率对比,4(b)为系统频率对比。
[0099]
从图4中可以看出,随着风速的提升,实际模型的系统频率在2s后出现小幅升高,由于该过程中风轮机转子转速上升较慢,系统频率变化率较小;12s时的5%负载突增使得表征电网的30mw同步发电机电磁功率突增,系统频率在同步机转子惯量以及vsg虚拟惯量的约束下大幅跌落,并随着风机恢复mppt而进入新的稳定工作点,聚合模型对系统的频率支撑效果与实际模型保持一致。
[0100]
案例2:33台风电机组动态聚合
[0101]
以完整33台风机的实际风场为例验证所提的聚合方法在大型风电场中应用的可行性,风机以3条汇流线接入系统。仿真中使用的风速曲线包含了秒级变化的阶跃分量以及hz级变化的随机分量。仿真中a、b、c三条汇流线对应的风速曲线如图5所示。2s时负载突增5%,12s时负载恢复。实际模型和动态聚合模型的并网功率和系统频率如图6所示,6(a)为并网功率对比,6(b)为系统频率对比。
[0102]
从图6可以看出,聚合模型与实际模型的输出功率存在小于10%的偏差,在两次仿真中负载扰动后的变化过程中,两套模型的稳态功率偏差小于5%。在负载突增过程中实际模型与聚合模型的系统频率最低点均为49.98hz,而在负载恢复过程中两者的频率最高点均达到50.07hz,频率调节时间常数基本相同,说明聚合模型对系统的频率支撑效果与实际模型保持一致。
[0103]
实施例2:
[0104]
本发明还提出了一种用于电力系统风电场的动态聚合系统200,如图7所示,包括:
[0105]
第一计算单元201,用于针对电力系统风场基于虚拟同步型风机,确定虚拟同步型风机的控制策略,根据所述控制策略,确定电力系统风电场的风机机电方程;
[0106]
第二计算单元202,用于对所述风机机电方程进行聚合,以获取聚合风机机电方程模型;
[0107]
第三计算单元203,用于将电力系统分布式风轮机作为电力系统风电场的同步发电机组的原动机,并基于所述聚合风机机电方程模型对电力系统分布式风轮机做等值处理,以确定电力系统分布式风轮机的等效惯量模型;
[0108]
聚合单元204,用于基于所述等效惯量模型,以进行电力系统风电场的动态聚合。
[0109]
其中,根据所述控制策略,确定电力系统风电场的风机机电方程,包括:
[0110]
根据所述控制策略,构建电力系统风电场架构及聚合模型;
[0111]
基于所述电力系统风电场架构及聚合模型,确定电力系统风电场的风机机电方程。
[0112]
其中,风机机电方程,包括:阻抗匹配方程,聚合风电场汇流母线电压方程和聚合风电场等效同步电抗方程。
[0113]
其中,聚合风机机电方程模型,包括:
[0114][0115]
其中,αa为聚合后等效角加速度,n为风机台数,2≤h≤n,ph为第h台风机的有功功率,为归一化后的虚拟惯量,为第h台风机机械转矩,为第h台风机电磁功率,ωa为角频率,
△
ωa为聚合后等效角频率变化率。
[0116]
其中,等效惯量模型,如下:
[0117][0118]
其中,jw为等效惯量,hw为等效惯量时间常数,sn为系统容量、fn为额定频率,p为转子极对数。
[0119]
其中,基于所述等效惯量模型,以进行电力系统风电场的动态聚合,包括:将电力系统风电场的等效风速,表征为电力系统风电场当前所能吸收的风能,并将所述风能作为等效惯量的输入变量,将所述输入变量输入至等效惯量模型进行计算,以确定电力系统分布式风轮机的等效惯量,基于确定的等效惯量对电力系统风电场进行调整,以进行电力系统风电场的动态聚合。
[0120]
本发明考虑到vsg控制模型与同步发电机的机电动态方程一致性,提出了基于虚拟同步型风机的风电场动态聚合条件,给出了多台风电机组并联汇流后的机端电压方程、等效同步电抗方程、虚拟同步轴方程及其聚合方法,通过2台风机、33台风机的机电动态模型对所提出的聚合方法进行时域仿真验证,聚合后的风场模型阶数明显降低,物理特征与传统同步电机相接近,但仍保留了风电场的动态特性。
[0121]
实施例3:
[0122]
基于同一种发明构思,本发明还提供了一种计算机设备,该计算机设备包括处理
器以及存储器,所述存储器用于存储计算机程序,所述计算机程序包括程序指令,所述处理器用于执行所述计算机存储介质存储的程序指令。处理器可能是中央处理单元(central processing unit,cpu),还可以是其他通用处理器、数字信号处理器(digital signal processor、dsp)、专用集成电路(application specificintegrated circuit,asic)、现成可编程门阵列(field-programmable gatearray,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等,其是终端的计算核心以及控制核心,其适于实现一条或一条以上指令,具体适于加载并执行计算机存储介质内一条或一条以上指令从而实现相应方法流程或相应功能,以实现上述实施例中方法的步骤。
[0123]
实施例4:
[0124]
基于同一种发明构思,本发明还提供了一种存储介质,具体为计算机可读存储介质(memory),所述计算机可读存储介质是计算机设备中的记忆设备,用于存放程序和数据。可以理解的是,此处的计算机可读存储介质既可以包括计算机设备中的内置存储介质,当然也可以包括计算机设备所支持的扩展存储介质。计算机可读存储介质提供存储空间,该存储空间存储了终端的操作系统。并且,在该存储空间中还存放了适于被处理器加载并执行的一条或一条以上的指令,这些指令可以是一个或一个以上的计算机程序(包括程序代码)。需要说明的是,此处的计算机可读存储介质可以是高速ram存储器,也可以是非不稳定的存储器(non-volatile memory),例如至少一个磁盘存储器。可由处理器加载并执行计算机可读存储介质中存放的一条或一条以上指令,以实现上述实施例中方法的步骤。
[0125]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。本发明实施例中的方案可以采用各种计算机语言实现,例如,面向对象的程序设计语言java和直译式脚本语言javascript等。
[0126]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0127]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0128]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0129]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造
性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
[0130]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。