1.本公开涉及风险管理装置、风险管理方法及风险管理系统。
背景技术:
2.近些年,自动驾驶的关联技术逐渐登场。并且,更加希望交通工具、特别是车辆的自动驾驶功能的高度化。在自动驾驶功能之中,尤以系统的安全性为最重要的性能之一。
3.随着汽车行驶,周边环境始终变化。在该变化的环境之中,为了确保安全性,需要实时地准确检测出有可能阻止汽车行驶的风险,动态地进行考虑了该风险的适当的驾驶控制。
4.以往,提出了用于确保具备自动驾驶功能的汽车的安全性的各种方案。
5.例如,在美国专利申请公开第2020/0148200号说明书(专利文献1)中,记载了如下技术:“方法包括:访问至少一个事故简档,其中每个事故简档包含针对车辆事故中所涉及的车辆描述指示事故期间车辆运行参数的数据的信息;实时收集来自车辆和至少一辆附近车辆的数据,所述数据描述所述车辆的当前车辆运行参数;将实时收集的所述数据与所述至少一个事故简档进行比较,以确定车辆碰撞的概率”。
6.现有技术文献
7.专利文献
8.专利文献1:美国专利申请公开第2020/0148200号说明书
技术实现要素:
9.发明所要解决的课题
10.在专利文献1中,记载了从车辆和其附近的至少一辆车辆实时地收集数据,通过将所收集的数据与预先制作的事故简档进行比较来确定交通事故的概率,并基于该概率来执行用于防止交通事故的防止行动的手段。
11.但是,在专利文献1中,交通事故的概率是根据基于当前的行驶情景而收集的数据与预先制作的现有的事故简档之间的相似度来确定的,因此重点被放在了对事先假定且预先制作了事故简档的行驶情景的应对上,对于存在有可能阻止汽车行驶的新风险的未知行驶情景的应对受到限制。
12.因而,为了进一步提高自动驾驶的安全性,期待一种不仅对于事先假定且预先制作了事故简档的行驶情景,而且对于存在有可能阻止汽车行驶的新风险的未知行驶情景的情况,也能够动态地进行考虑了该风险的适当的驾驶控制的手段。
13.因此,本公开的目的是提供一种风险管理手段,其通过实时地评价有可能阻止汽车行驶的风险,并且在存在新风险的情况下动态地生成新的行驶情景,由此做到在任意的行驶状况下都进行适当的驾驶控制,提高汽车的安全性。
14.用于解决课题的手段
15.为了解决上述课题,本发明的有代表性的一个风险管理装置包含:传感器部,其获
取与汽车及所述汽车的周边环境相关的传感器信息;风险分析部,其在所述汽车的行驶中分析所述传感器信息;情景管理部,其管理表征所述汽车的行驶状况的行驶情景;以及情景数据库,其保存所述行驶情景。并且,所述风险分析部包含:第一参数确定部,其从由所述传感器部获取的所述传感器信息之中确定风险参数,所述风险参数表示针对所述汽车的行驶的风险;可信度计算部,其计算所述风险参数的可信度;相关度计算部,其计算所述风险参数相对于所述情景数据库所保存的现有的行驶情景的相关度;情景判定部,其基于所述风险参数的可信度和相对于所述现有的行驶情景的相关度,判定所述风险参数相对于所述现有的行驶情景的对应度;以及活动判定部,其基于所述风险参数相对于所述现有的行驶情景的所述对应度,判定对所述汽车的驾驶进行控制的驾驶控制活动。而且,所述情景管理部包含:第二参数确定部,其在所述风险参数相对于所述情景数据库所保存的所述现有的行驶情景的相关度不满足规定的相关度基准的情况下,从所述风险参数之中确定不包含在所述情景数据库所保存的所述现有的情景中的新的风险参数;以及情景生成部,其至少基于所述新的风险参数生成新的行驶情景并追加到所述情景数据库中。
16.发明效果
17.根据本公开,能够提供如下风险管理手段:其通过实时地评价有可能阻止汽车行驶的风险,并且在存在新风险的情况下动态地生成新的行驶情景,来做到在任意的行驶状况下都进行适当的驾驶控制,提高汽车的安全性。
18.上述以外的课题、结构及效果将通过以下的具体实施方式中的说明来加以明确。
附图说明
19.图1是表示用于实施本公开的实施例的计算机系统的图。
20.图2是表示本公开的实施方式的风险管理系统的整体的硬件结构的一个例子的图。
21.图3是表示本公开的实施方式的风险管理装置的详细结构的一个例子的图。
22.图4是表示本公开的实施方式的情景db的数据结构的一个例子的图。
23.图5是表示本公开的实施方式的风险管理系统的逻辑结构的一个例子的图。
24.图6是表示本公开的实施方式的行驶情景判定的流程的一个例子的图。
25.图7是表示本公开的实施方式的行驶情景判定的结果是传感器信息所包含的风险参数被判定为与未知的行驶情景对应的情况下的处理的流程的一个例子的图。
26.图8是表示本公开的实施方式的风险分析部所执行的风险分析处理的一个例子的图。
27.图9是表示从本公开的实施方式的情景db中确定与风险参数的相关度满足规定的相关度基准的行驶情景的一个例子的图。
28.图10是表示本公开的实施方式的驾驶管理装置所执行的处理的流程的一个例子的图。
29.图11是表示对本公开的实施方式的安全条件在每一评价基准下的有效性进行表示的安全条件评价表的一个例子的图。
30.图12是表示对本公开的实施方式的风险参数在每一时间下的影响度进行表示的参数影响度表的一个例子的图。
31.图13是表示将本公开的实施方式的新的行驶情景与其它汽车共享的情况的一个例子的图。
具体实施方式
32.以下,参照附图对本发明的实施方式进行说明。此外,本发明不受该实施方式限定。另外,在附图的记载中,对相同的部分标注相同的附图标记进行表示。
33.首先,参照图1对用于实施本公开的实施方式的计算机系统300进行说明。本说明书中公开的各种实施方式的机构及装置可以应用于任意的适当的计算系统。计算机系统300的主要组成部分包含一个以上的处理器302、存储器304、终端接口312、存储接口314、i/o(输入输出)设备接口316及网络接口318。这些组成部分可以经由存储器总线306、i/o总线308、总线接口单元309及i/o总线接口单元310相互地连接。
34.计算机系统300可以包含被统称为处理器302的一个或多个通用可编程中央处理装置(cpu)302a及302b。在某一实施方式中,计算机系统300可以具备多个处理器,此外,在另一实施方式中,计算机系统300可以是单一的cpu系统。各处理器302执行存储器304所保存的命令,可以包含板上集成缓存。
35.在某一实施方式中,存储器304可以包含用于存储数据及程序的随机存取半导体存储器、存储装置或存储介质(易失性或非易失性中的任一方)。存储器304可以保存实施本说明书中说明的功能的程序、模块及数据结构中的全部或一部分。例如,存储器304可以保存风险管理应用程序350。在某一实施方式中,风险管理应用程序350可以包含将后述的功能在处理器302上执行的命令或描述。
36.在某一实施方式中,风险管理应用程序350可以代替处理器的系统、或除处理器的系统之外还通过硬件经由半导体设备、芯片、逻辑门、电路、电路卡和/或其它物理硬件设备来实施。在某一实施方式中,风险管理应用程序350可以包含命令或描述以外的数据。在某一实施方式中,可以以与总线接口单元309、处理器302或计算机系统300的其它硬件直接通信的方式提供照相机、传感器或其它数据输入设备(未图示)。
37.计算机系统300可以包含进行处理器302、存储器304、显示系统324及i/o总线接口单元310之间的通信的总线接口单元309。i/o总线接口单元310可以与用于在与各种i/o单元之间传送数据的i/o总线308连结。i/o总线接口单元310可以经由i/o总线308与还作为i/o处理器(iop)或i/o适配器(ioa)而被知晓的多个i/o接口单元312、314、316及318通信。
38.显示系统324可以包含显示控制器、显示存储器或者这两者。显示控制器能够将视频、音频或者这两者的数据提供给显示装置326。另外,计算机系统300可以包含构成为收集数据并向处理器302提供该数据的一个或多个传感器等设备。
39.例如,计算机系统300可以包含:收集心跳数数据、应激反应级别数据等的生物传感器;收集湿度数据、温度数据、压力数据等的环境传感器;以及收集加速度数据、运动数据等的运动传感器等。除此以外的类型的传感器也是可以使用的。显示系统324也可以连接于单独的显示器画面、电视机、平板电脑或便携型设备等显示装置326。
40.i/o接口单元具备与各种存储设备或i/o设备通信的功能。例如,终端接口单元312可以安装视频显示装置、扬声器电视机等用户输出设备、键盘、鼠标、数字键盘、触摸板、跟踪球、按钮、光笔或其它指示器设备等的用户输入设备这样的用户i/o设备320。用户可以通
过使用用户接口对用户输入设备进行操作,从而对用户i/o设备320及计算机系统300输入输入数据、指示,并接收来自计算机系统300的输出数据。用户接口例如也可以经由用户i/o设备320向显示装置进行显示、通过扬声器进行再现或者经由打印机进行印刷。
41.存储接口314可以安装一个或多个磁盘驱动器、直接存取存储装置322(通常是磁盘驱动器存储装置,但也可以是构成为看上去是单一的磁盘驱动器的磁盘驱动器的阵列或其它存储装置)。在某一实施方式中,存储装置322也可以作为任意的二级存储装置而安装。存储器304的内容也可以被存储在存储装置322中,并根据需要从存储装置322中读出。i/o设备接口316也可以提供针对打印机、传真机等其它i/o设备的接口。网络接口318也可以提供通信路径,以使计算机系统300和其它设备能够相互地通信。该通信路径例如可以是网络330。
42.在某一实施方式中,计算机系统300也可以是多用户大型计算机系统、单用户系统或服务器计算机等不具有直接用户接口的、接收来自其它计算机系统(客户端)的请求的设备。在其它实施方式中,计算机系统300也可以是台式计算机、便携型计算机、笔记本计算机、平板计算机、袖珍计算机、电话、智能手机或其它任意的适当的电子设备。
43.接下来,参照图2对本公开的实施方式的风险管理系统的结构进行说明。
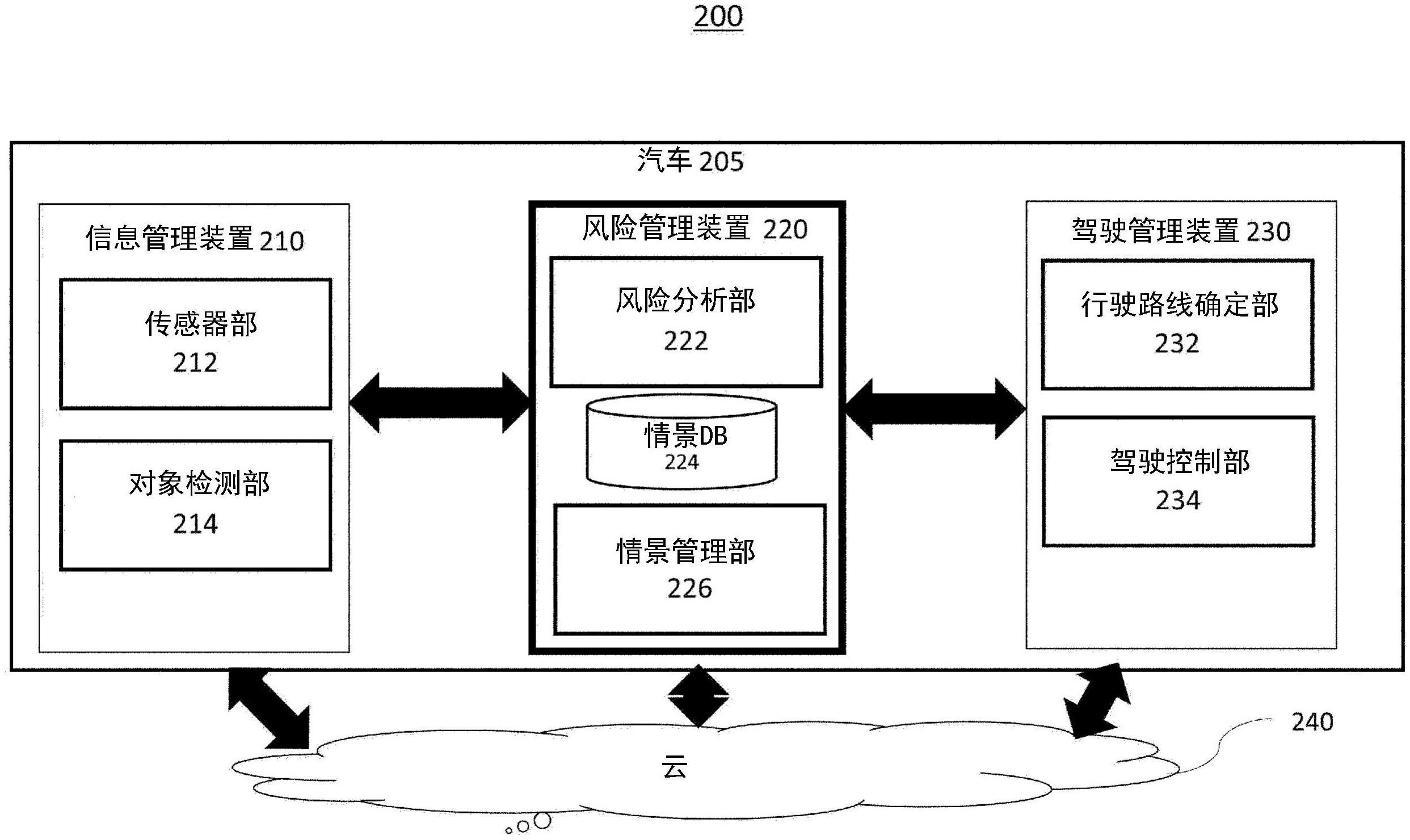
44.图2是表示本公开的实施方式的风险管理系统200的整体的硬件结构的一个例子的图。如图2所示,本公开的实施方式的风险管理系统200主要包含信息管理装置210、风险管理装置220、驾驶管理装置230及云240。
45.图2所示的信息管理装置210、风险管理装置220及驾驶管理装置230可以搭载于汽车205,并经由通信网络(图2中未图示)与云240连接。不过,本公开并不限定于此,还可以是利用云240、外部的计算设备来实施信息管理装置210、风险管理装置220及驾驶管理装置230中的功能的一部分的结构。
46.信息管理装置210是用于收集并分析与汽车205、汽车205的周边环境相关的信息的装置。如图2所示,信息管理装置210包含传感器部212和对象检测部214。
47.传感器部212设置于汽车205,是用于获取与汽车205、汽车205的周边环境相关的各种信息的功能部。传感器部212例如可以包含如下结构的传感器,该传感器获取影像信息、声音信息、温度信息、道路信息、位置信息、移动信息、气压信息、湿度信息、加速度信息、交通信息、信号机信息、灾害信息、雨量信息、风向信息、风量信息、风速信息、风压信息等表示与汽车205及汽车205的周边环境的各个方面相关的观测结果的数据,作为传感器信息。
48.例如,在某一实施方式中,传感器部212可以获取汽车205的速度、加速度、当前位置、天气预报、表示汽车205的周边的影像等。
49.传感器部212实时且持续地获取传感器信息,将所获取的信息传送给对象检测部214及风险管理装置220,并且发送到云240。
50.对象检测部214是基于由传感器部212获取的传感器信息来检测汽车205的周边环境中的对象的功能部。在某一实施方式中,对象检测部214例如可以是进行了学习的神经网络(卷积神经网络),该神经网络使用由传感器部212获取的影像来检测其它汽车、树木、人类、建筑物、动物等有可能阻止汽车205行驶的对象的类别。
51.对象检测部214将对象检测的结果传送给风险管理装置220,并且发送到云240。
52.风险管理装置220是用于实时地评价有可能阻止汽车205行驶的风险,并且在存在
新的风险的情况下动态地生成新的行驶情景的装置。在本公开中,“新的风险”这一表述是指与后述的情景db224中所包含的现有的行驶情景不对应的风险。
53.如图2所示,风险管理装置220包含风险分析部222、情景db224和情景管理部226。
54.风险分析部222是基于由传感器部212获取的传感器信息和/或由对象检测部214生成的对象检测的结果来判定有可能阻止汽车205行驶的风险的功能部。在此,所谓风险,是指有可能损害汽车205的安全性或行驶舒适性的事件、状况或对象。作为一个例子,此处的风险可以包含与其它汽车的碰撞、使道路容易变滑的雨、雪、倒下的树木、动物等,不作特别限定。
55.此外,关于风险分析部222的功能的细节将后述,因此在此省略其说明。
56.情景数据库(以下为情景db)224是用来保存在定量地评价风险的影响度、判定用于确保汽车的安全性的驾驶控制活动时所使用的行驶情景、odd(operational design domain、运行设计域)参数、安全条件、风险指标、风险模型等的数据库。
57.此处的行驶情景是表征汽车的行驶状况的信息。更具体而言,行驶情景是表现特定时刻下的行驶状况的数据结构,例如可以包含道路的信息(道路的类型、道路的形状、道路的状态等)、交通的信息(交通流量、速度限制、其它汽车的平均速度等)、车道数、物体的存在、在与其它汽车的信息收发中获取的v2v(vehicle to vehicle)信息、odd参数。
58.另外,行驶情景可以包含与特定的事件、现象(事象)对应的信息。作为一个例子,情景db224可以包含“雨天时”、“前车进行了急刹车的情况”等作为行驶情景。另外,如后所述,情景db224所保存的各行驶情景也可以包含对在该情景下有可能产生的风险进行表示的风险指标。例如,“前车作出了急刹车操作的情况”这一行驶情景可以包含“与前车碰撞”这一风险指标。
59.而且,各个行驶情景也可以与用于确保汽车205的安全性的驾驶控制活动的候选、用于避免特定的行驶情景下的特定的危险(hazard)的安全条件建立对应。如后所述,活动判定部能够基于与行驶情景建立了对应的驾驶控制活动的候选来判定适当的驾驶控制活动。
60.此外,关于情景db224的细节将后述,因此在此省略其说明。
61.情景管理部226是用于在存在新的风险的情况下动态地生成新的行驶情景并对情景db224所保存的行驶情景进行更新的功能部。
62.此外,关于情景管理部226的细节将后述,因此在此省略其说明。
63.驾驶管理装置230是用于确定汽车205的行驶路线并且对汽车的驾驶进行控制的装置。如图2所示,驾驶管理装置230包含行驶路线确定部232和驾驶控制部234。
64.行驶路线确定部232是用于确定汽车205的行驶路线的功能部。行驶路线确定部232可以基于由风险管理装置220生成的驾驶控制活动、由传感器部212获取的传感器信息和/或odd(operational design domain)参数db(在图2中未图示),判定汽车的行驶路线,上述odd规定被设计为使汽车适当动作的特定的动作条件(道路的种类、汽车的当前位置、速度范围、环境条件、交通法规)。
65.此外,作为此处的行驶路线确定部,可以适当使用被用于现有的自动驾驶功能的行驶路线确定部,在本公开中不作特别限定。
66.驾驶控制部234是用于使汽车按照由行驶路线确定部232确定的行驶路线进行行
驶的功能部。驾驶控制部234基于由行驶路线确定部232确定的行驶路线,执行用于使汽车安全到达规定的目的地的加速、减速、转向等各种控制。
67.云240是用来经由因特网等通信网络提供对于信息管理装置210、风险管理装置220、驾驶管理装置230的各种功能进行支援的计算、数据库、存储等各种服务的平台。云240例如也可以保存由传感器部212获取的传感器信息、由对象检测部214生成的对象检测结果、情景db224等的备份,或者部分地承担风险管理装置220、驾驶管理装置230所执行的运算处理。
68.根据如以上说明的那样构成的风险管理系统200,能够实时地评价有可能阻止汽车205行驶的风险,并且在存在新的风险的情况下动态地生成新的行驶情景。另外,由此在任意的行驶状况下都能够进行适当的驾驶控制,提高汽车205的安全性。
69.接下来,参照图3对本公开的实施方式的风险管理装置220的结构的细节进行说明。
70.图3是表示本公开的实施方式的风险管理装置220的详细结构的一个例子的图。如图3所示,风险管理装置220包含风险分析部222、情景db224、情景管理部226、odd传感器优先度表361及风险数据库(以下为风险db)381。
71.如上所述,风险分析部222是基于由传感器部(例如,图2所示的传感器部212)获取的传感器信息和/或由对象检测部(例如,图2所示的对象检测部214)生成的对象检测的结果来判定有可能阻止汽车行驶的风险的功能部。如图3所示,风险分析部222包含第一参数确定部362、可信度计算部364、相关度计算部366、情景判定部367、风险评价部368和活动判定部370。
72.第一参数确定部362是从由传感器部获取的传感器信息之中确定表示针对汽车的行驶而言的风险的风险参数的功能部。此处的风险参数是用于在特定的行驶情景下评价风险的有用的信息。例如,此处的风险参数可以包含汽车的速度、道路的种类(石子路、铺装路)、当前时刻、车距等。第一参数确定部362可以通过对传感器部所获取的传感器信息进行统计分析来确定具有规定的分布的参数作为风险参数,也可以通过参照对特定的行驶情景下的风险参数进行指定的表来确定风险参数(例如,在“雨天时”这一行驶情景下,“轮胎的种类”可以被确定为风险参数)。
73.作为风险参数的例子,例如可想到碰撞时间(time to collision)、安全合流距离(safe merging distance)、进场车道平均速度(average velocity of incoming lane)、平均车辆数(average no of vehicles)等。不过,本公开并不限定于此,可以将任意的参数作为风险参数。
74.可信度计算部364是计算对风险参数的确切性进行表示的可信度的功能部。此处的可信度是表示风险参数的确切性的衡量指标,可以基于odd传感器优先度表361所保存的odd传感器简档来判定。该可信度例如可以表示为0~1的范围内的数值(更大的值的可信度更高)。
75.此处的odd传感器简档是在每一行驶情景下指定传感器信息的优先度的数据。例如,在“夜间行驶”这一行驶情景的情况下,odd传感器简档可以对“rgb影像信息”这一传感器信息赋予“0.4”的优先度,对“lidar影像信息”这一传感器信息赋予“0.8”的优先度(即,在黑暗环境下,应将lidar影像优先于rgb影像作为可靠性高的信息)。
76.相关度计算部366是计算风险参数相对于情景db224所保存的现有的行驶情景的相关度的功能部。此处的相关度是表示风险参数相对于现有的行驶情景的相似度的衡量指标,例如可以表示为0~1的范围内的数值(更大的值的相关度更高)。如后所述,基于该相关度,能够判定某一风险参数是与现有的行驶情景对应,还是与未知的行驶情景对应,抑或与未定义的行驶情景对应。
77.情景判定部367是基于可信度计算部364所计算的风险参数的可信度、和该风险参数相对于情景db224所保存的现有的行驶情景的相关度来判定该风险参数相对于现有的行驶情景的对应度的功能部。此处的对应度是表示风险参数与现有的行驶情景的关联度的衡量指标。如后所述,该对应度也可以表示风险参数是否与现有的行驶情景对应,或者风险参数是否与未知的行驶情景对应(也就是说,不与现有的行驶情景对应),抑或是否与未定义的行驶情景对应(也就是说,风险参数不确切,与现有的行驶情景的对应度不明)。
78.风险评价部368是用于通过使用规定的风险模型来分析特定的行驶情景下的风险指标从而对于基于该行驶情景所判定的驾驶控制活动的危险度进行判定的功能部。此处的驾驶控制活动的危险度是表示执行该驾驶控制活动的情况下的危险性的衡量指标,例如可以表示为0~1的范围内的数值(更大的值的危险度更高)。
79.活动判定部370是基于风险参数相对于现有的行驶情景的对应度来判定对汽车的驾驶进行控制的驾驶控制活动的功能部。在本公开中,“驾驶控制活动”可以是为了提高行驶的安全性或舒适性而使汽车加速、减速或转向等对汽车的驾驶进行控制的任意的动作。
80.如上所述,活动判定部370能够根据风险参数是与现有的行驶情景对应,还是与未知的行驶情景对应,抑或与未定义的行驶情景对应,来判定不同的驾驶控制活动。
81.如上所述,情景管理部226是用于在存在新的风险的情况下动态地生成新的行驶情景并对情景db224所保存的行驶情景进行更新的功能部。如图3所示,情景管理部226包含第二参数确定部372、情景生成部374、安全条件判定部376、情景更新部378和传送部380。
82.第二参数确定部372是在风险参数相对于情景db224所保存的现有的行驶情景的相关度不满足规定的相关度基准的情况下,从这些风险参数之中确定没有被包含在情景db224所保存的现有的行驶情景中的新的风险参数的功能部。在此,新的风险参数是指不与现有的行驶情景对应的风险参数,如后所述,能够使用这些新的风险参数生成新的行驶情景。
83.情景生成部374是基于第二参数确定部372所确定的新的风险参数、对发生了新的风险参数的行驶状况进行表示的行驶状况信息、及对在该行驶状况下有可能产生的风险进行表示的风险指标来生成新的行驶情景,并将其追加到情景db224中的功能部。在此,在生成新的行驶情景时,在风险db381中保存对在该行驶状况下有可能产生的风险进行表示的风险指标的信息。该风险db381可以包含在过去的行驶状况下产生过的风险、为了减轻该风险而事先规定的规则等。
84.安全条件判定部376是用于判定为了减轻特定的风险而使用的安全条件(safety barriers)的有效性的功能部。这些安全条件例如可以是用于使在特定的行驶情景下产生的特定的危险减轻以确保汽车的安全性的对策。
85.此外,关于安全条件判定部376所执行的处理的细节将后述,因此在此省略其说明。
86.情景更新部378是用于对情景db224所保存的现有的行驶情景进行更新的功能部。情景更新部378例如可以基于风险参数的影响度、安全条件判定部376所计算的安全条件的有效性得分,来更新情景db224所保存的现有的行驶情景。
87.传送部380是在向情景db224追加了新的行驶情景的情况下将该新的行驶情景经由通信网络传送给汽车的周边所存在的周边汽车的功能部。传送部380可以将新的行驶情景直接传送给周边汽车,也可以例如经由云上的云服务器将新的行驶情景传送给周边汽车。
88.根据如以上说明的那样构成的风险管理装置220,能够实时地评价有可能阻止汽车行驶的风险,并且在存在新的风险的情况下动态地生成新的行驶情景。另外,由此在任意的行驶状况下都能够进行适当的驾驶控制而提高汽车的安全性。
89.接下来,参照图4对本公开的实施方式的情景db进行说明。
90.图4是表示本公开的实施方式的情景db224的数据结构的一个例子的图。如上所述,本公开的实施方式的情景db224是用来保存在定量地评价风险的影响度、判定用于确保汽车的安全性的驾驶控制活动时使用的行驶情景的数据库。
91.如图4所示,情景db224包含用于管理行驶情景的行驶情景管理表460。该行驶情景管理表460可以基于交通信息410、汽车设备信息420、行驶信息430、地图信息440、汽车关系信息450等的由信息管理装置210获取的各种信息而生成,上述交通信息410表示当前的交通量、所预测的交通量;上述汽车设备信息420通过设置于汽车的传感器、设备来获取;上述行驶信息430表示道路的状态、汽车的路径;上述地图信息440包含与汽车所行驶的区域对应的地图;上述汽车关系信息450表示与汽车的周边所存在的其它汽车的距离关系。
92.在某一实施方式中,行驶情景管理表460也可以通过基于云(例如,图2所示的云240)的大数据分析及机器学习方法的生成处理455来生成各种信息410、420、430、440、450。通过该生成处理455,基于各种信息410、420、430、440、450生成行驶情景。在此,作为生成行驶情景的手段,可以使用现有的大数据分析、机器学习方法,在此不作特别限定。
93.如图4所示,行驶情景管理表460包含“车道变更”、“雨天”等行驶情景462、汽车的速度、到目的地为止的距离等汽车参数464、“高速路”等道路信息466、照明条件468、“制动距离”、“与车的碰撞”等的表示在该行驶情景下有可能产生的风险的风险指标。
94.不过,行驶情景管理表460并不限定于该信息。例如,在某一实施方式中,情景db224所保存的各行驶情景462与驾驶控制活动的候选及安全条件建立了对应。另外,在某一实施方式中,行驶情景管理表460所包含的风险指标、驾驶控制活动的候选和/或安全条件也可以被赋予优先度。例如,与行人多的人行横道、狭窄的道路、恶劣天气等危险度更高的行驶情景对应的风险指标可以被赋予更高的优先度。在该情况下,后述的风险评价部及活动判定部能够基于对风险指标、驾驶控制活动的候选和/或安全条件赋予的优先度来判定驾驶控制活动及该驾驶控制活动的危险度。
95.在某一实施方式中,情景db224中的行驶情景462可以表示为{egostate1,egostate2,egostaten,v1state1,v1state2,{(r1,i1),{(rn,in)},hazard,{sc1,sc2,scn}}这样的元组。在此,“egostate”是表示汽车的odd状态的信息,“vstate”是表示周边的汽车的状态的信息,“r”是表示风险指标的信息,“i”是表示风险的影响度的信息,“sc”是表示安全条件的信息。
96.根据如以上说明的那样构成的情景db224,能够针对各种行驶情景分别保存与有可能阻止汽车行驶的风险相关的信息。另外,如后所述,通过使用该情景db224所保存的行驶情景,能够在任意的状况下准确地判定用于确保汽车的安全性的驾驶控制活动。而且,在本公开中,在产生了包含现有的行驶情景所不包含的新风险的未知状况的情况下,动态地生成与该未知状况对应的新的行驶情景,并将其追加到情景db224。由此,能够在任意的行驶状况下进行适当的驾驶控制,提高汽车的安全性。
97.接下来,参照图5对本公开的实施方式的风险管理系统的逻辑结构的一个例子进行说明。
98.图5是表示本公开的实施方式的风险管理系统200的逻辑结构的一个例子的图。如图5所示,风险管理系统200主要包含风险分析部222、情景db224及情景管理部226。风险分析部222、情景db224及情景管理部226的详细结构已经参照图2~图4如上进行了描述,因此在此省略其说明。
99.此外,为了便于说明,图5仅示出了风险管理系统200的主要的功能,一部分的功能部的记载被省略。
100.如图5所示,首先,风险分析部222中的第一参数确定部362获取由信息管理装置(例如,图2所示的信息管理装置210)获取的传感器信息510,并从该传感器信息510之中确定表示针对汽车的行驶而言的风险的风险参数。之后,可信度计算部364基于例如odd传感器优先度表所保存的odd传感器简档,计算对第一参数确定部362所确定的风险参数的确切性进行表示的可信度。
101.接下来,相关度计算部366计算风险参数相对于情景db224所保存的现有的行驶情景的相关度。如上所述,此处的相关度是表示风险参数相对于现有的行驶情景的相似度的衡量指标,例如可以表示为0~1的范围内的数值(更大的值的相关度更高)。基于该相关度,能够判定与第一参数确定部362所确定的风险参数对应的行驶情景是否已经存在于情景db224中。
102.接下来,情景判定部367基于可信度计算部364所计算出的风险参数的可信度、及该风险参数相对于情景db224所保存的现有的行驶情景的相关度,判定该风险参数相对于现有的行驶情景的对应度。如上所述,此处的对应度是表示风险参数与现有的行驶情景的关联度的衡量指标。如后所述,该对应度也可以表示风险参数是否与现有的行驶情景对应,或者风险参数是否与未知的行驶情景对应(也就是说,不与现有的行驶情景对应),抑或是否与未定义的行驶情景对应(也就是说,风险参数不确切,与现有的行驶情景的对应度不明)。
103.在基于风险参数相对于情景db224所保存的现有的行驶情景的相关度、以及可信度计算部364所计算的可信度,判定为该风险参数与情景db224所保存的现有的行驶情景(例如,第一行驶情景)对应的情况下,情景判定部367确定该行驶情景。
104.接下来,在基于风险参数相对于情景db224所保存的现有的行驶情景的相关度、以及可信度计算部364所计算的可信度确定了现有的行驶情景之后,活动判定部370基于所确定的行驶情景来判定驾驶控制活动。例如,活动判定部370可以从与所确定的行驶情景建立了对应的驾驶控制活动的候选之中,判定具有提高汽车安全性的实绩的驾驶控制活动。
105.接下来,风险评价部368从情景db224获取与情景判定部367所确定的行驶情景对
应的风险指标515。如上所述,该风险指标515是表示在特定的行驶情景下有可能与特定的驾驶控制活动相伴的风险的信息,在每个行驶情景下有所不同。在此,在对风险指标赋予了优先度的情况下,风险评价部368也可以获取优先度满足规定的优先度基准的风险指标。
106.接下来,风险评价部368通过使用与该行驶情景对应的风险模型对所获取的风险指标515进行分析,从而判定由活动判定部判定的驾驶控制活动的危险度。
107.更具体而言,风险评价部368能够通过在情景判定部367所确定的行驶情景下评价与活动判定部所判定的驾驶控制活动对应的风险指标515的严重程度,从而判定驾驶控制活动的危险度。
108.在此,风险评价部368可以从例如情景db224获取与该现有的行驶情景对应的风险模型,也可以从保存有评价驾驶控制活动的危险度的风险模型的其它数据库进行获取
109.接下来,风险评价部368判定对于驾驶控制活动所计算的危险度是否满足规定的危险度基准。在所计算的危险度满足规定的危险度基准的情况下,风险评价部将该驾驶控制活动作为驾驶控制活动520传送给驾驶管理装置230,在所计算的危险度不满足规定的危险度基准的情况下,风险评价部368向活动判定部370传送将该驾驶控制活动变更为满足规定的危险度基准的指示。
110.接收到驾驶控制活动520的驾驶管理装置230可以执行驾驶控制活动520,也可以变更驾驶控制活动520,还可以放弃驾驶控制活动520并执行不同的驾驶控制活动520。
111.以上说明了风险参数被判定为与情景db224所保存的现有的行驶情景对应的情况下的处理,但在风险参数与未知的行驶情景对应(也就是说,不与现有的行驶情景对应)的情况下以及在风险参数与未定义的行驶情景对应的情况下,处理是不同的。
112.更具体而言,例如,在基于风险参数相对于情景db224所保存的现有的行驶情景的相关度、以及可信度计算部364所计算的可信度,判定为该风险参数与情景db224所保存的现有的行驶情景不对应的情况下,情景生成部374使用未被判断为与现有的行驶情景对应的风险参数(即,新的风险参数),生成新的行驶情景,并将其保存于情景db224。
113.另外,情景更新部378在计算出风险参数的影响度之后,使用满足规定的影响度基准的风险参数对情景db224所保存的现有的行驶情景进行更新。
114.此外,关于情景判定的细节将参照图6后述,因此在此省略其说明。
115.根据如以上说明的那样构成的风险管理装置220,能够实时地评价有可能阻止汽车行驶的风险,并且在存在新的风险的情况下动态地生成新的行驶情景。另外,由此在任意的行驶状况下都能够进行适当的驾驶控制,提高汽车的安全性。
116.接下来,参照图6对本公开的实施方式的行驶情景判定进行说明。
117.图6是表示本公开的实施方式的情景判定部367所执行的情景判定处理的流程的一个例子的图。如上所述,在本公开中,为了判定用于确保汽车的安全性的驾驶控制活动,期望判定传感器信息所包含的风险参数是与情景db所保存的现有的行驶情景610对应,还是与未知的行驶情景620对应,抑或与未定义的行驶情景630对应。
118.在此,现有的行驶情景610是已经保存于情景db的行驶情景。未知的行驶情景620是未被保存在情景db的行驶情景。未定义的行驶情景630是由于缺乏风险参数的可信度而与风险参数的对应度不清楚的行驶情景。
119.如上所述,本公开的实施方式的行驶情景判定基于可信度计算部(例如,图3及图4
所示的可信度计算部364)所计算的可信度、以及相关度计算部366所计算的相关度计算部366来进行。
120.更具体而言,情景判定部(例如,图3及图5所示的情景判定部367)在第一参数确定部(例如,图3及图5所示的第一参数确定部362)所确定的风险参数的可信度满足规定的可信度基准、且该风险参数相对于情景db所保存的现有的行驶情景(例如,第一行驶情景)的相关度满足规定的相关度基准的情况下,判定为该风险参数与现有的行驶情景610对应。
121.在风险参数被判定为与现有的行驶情景610对应的情况下,如上所述,活动判定部(例如图3及图5所示的活动判定部370)基于现有的行驶情景610判定驾驶控制活动(第一驾驶控制活动)。
122.之后,风险评价部(例如图3及图5所示的风险评价部368)从情景db(例如,图2~图5所示的情景db224)获取该现有的行驶情景610的风险指标,使用与该现有的行驶情景610对应的风险模型,分析所获取的风险指标,从而判定由活动判定部判定的驾驶控制活动的危险度。
123.在计算出的危险度满足规定的危险度基准的情况下,风险评价部将该驾驶控制活动传送给驾驶管理装置230,在计算出的危险度不满足规定的危险度基准的情况下,风险评价部向活动判定部传送将该驾驶控制活动变更为满足规定的危险度基准的指示。
124.另一方面,情景判定部在第一参数确定部所确定的风险参数的可信度满足规定的可信度基准、且该风险参数相对于情景db所保存的现有的行驶情景的相关度不满足规定的相关度基准的情况下,判定为该风险参数与未知的行驶情景620对应。
125.图7是表示本公开的实施方式的行驶情景判定的结果是传感器信息所包含的风险参数被判定为与未知的行驶情景对应的情况下的处理的流程的一个例子的图。
126.在风险参数被判定为与未知的行驶情景(图6所示的未知的行驶情景620)对应的情况下,风险分析部222的活动判定部判定用于消除该风险参数的驾驶控制活动(第二驾驶控制活动)并将其传送到驾驶管理装置230,并且将该风险参数作为新的风险参数传送到情景管理部226。
127.作为驾驶控制活动的一个例子,可以是,例如在风险参数为“与前车的车距小于规定值”的情况下,活动判定部判定降低汽车的速度以使汽车与前车的车距满足该规定值的驾驶控制活动。
128.另外,在此,活动判定部可以将该风险参数直接发送到情景管理部226,也可以保存于能够访问情景管理部226的暂存db(未图示)。
129.接收到驾驶控制活动的驾驶管理装置230可以执行该驾驶控制活动,也可以变更驾驶控制活动,还可以放弃驾驶控制活动并执行不同的驾驶控制活动。
130.另外,接收到与现有的行驶情景不对应的新的风险参数的情景管理部226生成与这些新的风险参数对应的新的行驶情景,并将其保存于情景db224。驾驶管理装置230通过访问情景db224,能够通过参照包括新追加到情景db224中的新的行驶情景在内的任意的行驶情景来确定适当的驾驶控制活动。
131.接下来,回到图6,说明风险参数与未定义的行驶情景对应的情况。
132.在第一参数确定部所确定的风险参数的可信度不满足规定的可信度基准、且该风险参数相对于情景db所保存的现有的行驶情景的相关度不满足规定的相关度基准的情况
下,该风险参数被判定为与图6所示的未定义的行驶情景630对应。
133.在风险参数被判定为与未定义的行驶情景630对应的情况下,活动判定部判定向满足规定的安全基准的行驶状态迁移的驾驶控制活动(第三驾驶控制活动)。满足该安全基准的行驶状态可以是停车的状态、使一部分功能无效的工作状态即“mrc”(minimal risk condition,最小风险条件)。
134.如以上说明,通过判定传感器信息所包含的风险参数是与情景db所保存的现有的行驶情景对应,还是与未知的行驶情景对应,抑或与未定义的行驶情景对应,能够判定用于确保汽车的安全性的驾驶控制活动,并且动态地生成新的行驶情景。
135.接下来,参照图8及图9对本公开的实施方式的风险分析部所执行的风险分析处理进行说明。
136.图8是表示本公开的实施方式的风险分析部所执行的风险分析处理700的一个例子的图。图8所示的风险分析处理700是由风险分析部中的各功能部执行的处理。另外,根据图8所示的风险分析处理700,能够判定用于确保汽车的安全性的驾驶控制活动。
137.首先,在步骤704中,第一参数确定部(例如,图3所示的第一参数确定部362)从由传感器部(例如,图2所示的传感器部212)获取的传感器信息之中,确定表示针对汽车的行驶而言的风险的风险参数。如上所述,第一参数确定部可以通过对传感器部所获取的传感器信息进行统计分析而将具有规定的分布的参数确定为风险参数,也可以通过参照在特定的行驶情景下基于规定的odd状态(车辆位置(vehicle position)、速度限制(speed limit)、道路类型(road type)、时间(time of day)、天气(weather)、车道数(number of lanes)等)指定重要的风险参数的表来确定风险参数(例如,在正下雨的行驶情景下,可以将“轮胎的种类”这一参数确定为风险参数)。
138.作为风险参数的例子,例如可想到碰撞时间(time to collision)、安全合流距离(safe merging distance)、进场车道平均速度(average velocity of incoming lane)、平均车辆数(average no of vehicles)等。不过,本公开并不限定于此,可以将任意的参数作为风险参数。
139.接下来,在步骤706中,可信度计算部(例如,图3所示的可信度计算部364)计算表示风险参数的确切性的可信度。如上所述,此处的可信度是表示风险参数的确切性的衡量指标,是基于odd传感器优先度表361所保存的odd传感器简档的信息、以及以对象检测部的对象检测结果为依据的确切性参数r来计算的。在对象检测结果中,在检测出了汽车的周边环境中所存在的全部对象的类别(树木、建筑物、汽车、动物等)的情况下,该确切性参数r为“1”,在对象检测结果中存在未被检测出类别的不明的对象的情况下,该确切性参数r为负值。
140.另外,如上所述,odd传感器简档是在每一行驶情景下表示传感器信息的优先度及各种传感器的检测范围的数据结构。
141.风险参数的可信度通过以下的算式1求出。
142.[算式1]
[0143]
可信度=r(w1σ1 w2σ2 w3σ3
…
)
[0144]
在此,w1、w2、w3是基于odd传感器简档中指定的各传感器的优先度的加权参数,σ是odd传感器简档中保存的各传感器的检测范围,r是基于上述对象检测结果的确切性参
数。
[0145]
接下来,在步骤708中,情景判定部判定通过步骤706计算出的可信度是否满足规定的可信度基准。该可信度判定基准是对必要最低限度的可信度进行指定的值,可以基于过去的可信度计算来确定,也可以由风险管理系统200的管理者确定。
[0146]
在通过步骤706计算出的可信度满足规定的可信度基准的情况下,本处理进入步骤712,在通过步骤706计算出的可信度不满足规定的可信度基准的情况下,本处理进入步骤710。
[0147]
在通过步骤706计算出的可信度不满足规定的可信度基准的情况下,在步骤710中,情景判定部判定为该风险参数与未定义的行驶情景对应。之后,如上所述,活动判定部判定使汽车向满足规定的安全基准的行驶状态迁移的驾驶控制活动(第三驾驶控制活动)。
[0148]
在通过步骤706计算出的可信度满足规定的可信度基准的情况下,在步骤712中,相关度计算部(例如,图3~图4所示的相关度计算部366)计算风险参数相对于情景db所保存的现有的行驶情景的相关度。在此,相关度计算部可以使用相似度函数(欧几里得距离、余弦相似度),该相似度函数计算风险参数相对于情景db所保存的现有的行驶情景的相似度。
[0149]
在步骤714中,情景判定部判定通过步骤712计算出的相关度是否满足规定的相关度基准。该规定的相关度基准是对必要最低限度的相关度进行指定的值,可以基于过去的相关度计算来确定,也可以由风险管理系统200的管理者确定。
[0150]
在通过步骤712计算出的相关度满足规定的相关度基准的情况下,本处理进入步骤718,在通过步骤712计算出的相关度不满足规定相关度基准的情况下,本处理进入步骤716。
[0151]
在通过步骤712计算出的相关度不满足规定相关度基准的情况下,在步骤716中,情景判定部判定为该风险参数与未知的行驶情景对应。之后,如上所述,活动判定部判定用于消除该风险参数的驾驶控制活动(第二驾驶控制活动),并且情景生成部开始新的行驶情景的生成。之后,本处理进入步骤728。
[0152]
在此,所谓用于消除风险参数的驾驶控制活动,是用于变更汽车的行驶情景以使该风险参数不包含在以后获取的传感器信息中的驾驶控制活动。作为一个例子,在“超过了速度限制”这一风险参数的情况下,用于消除风险参数的驾驶控制活动可以是在降低汽车的速度之后继续进行通常的行驶的活动。另外,作为另一个例子,用于消除风险参数的驾驶控制活动也可以是在使汽车移动到不同的行驶区(例如另一车道等)之后继续进行通常的行驶的活动。
[0153]
接下来,在步骤718中,活动判定部(例如,图3、图5所示的活动判定部370)从情景db之中确定与风险参数的相关度满足规定的相关度基准的行驶情景。
[0154]
图9是表示从情景db之中确定与风险参数的相关度满足规定的相关度基准的行驶情景的一个例子的图。如图9所示,在情景db所保存的行驶情景管理表460中,按每一行驶情景810,保存对该行驶情景计算的风险参数rp1、rp2、rp3的相关度基准820。从其中确定与风险参数rp1、rp2、rp3的相关度满足规定的相关度基准的行驶情景(例如,相关度最高的行驶情景)。作为一个例子,如图9所示,由于行驶情景s3与风险参数rp1、rp2、rp3的综合性的相关度最高,因此确定行驶情景s3。
[0155]
在确定了与风险参数的相关度满足规定的相关度基准的行驶情景之后,活动判定部基于所确定的行驶情景来判定驾驶控制活动。在某一实施方式中,活动判定部可以从与所确定的行驶情景建立了对应的驾驶控制活动的候选之中,判定具有提高汽车安全性的实绩的驾驶控制活动。
[0156]
接下来,在步骤720中,风险评价部(例如,图3、图5所示的风险评价部368)从情景db获取通过步骤718确定的行驶情景的风险指标,使用与该行驶情景对应的风险模型对所获取的风险指标进行分析,从而判定通过步骤718判定的驾驶控制活动的危险度。在此,在对风险指标赋予了优先度的情况下,风险评价部368也可以获取优先度满足规定的优先度基准的风险指标。
[0157]
作为一个例子,可以是,风险评价部在使用与该行驶情景对应的风险模型对所获取的风险指标进行分析的结果是“雨天时”这一行驶情景中,针对“刹车”这一驾驶控制活动,对“汽车打滑,驾驶不稳定”这一风险指标赋予“0.2”的严重程度,对“与后车碰撞”这一风险指标赋予“0.3”的严重程度,之后,基于这些风险指标来判定该驾驶控制活动的危险度。例如,风险评价部也可以将对各个风险指标计算出的严重程度的平均值作为该驾驶控制活动的危险度。在该情况下,该驾驶控制活动的危险度为“0.25”。
[0158]
接下来,在步骤722中,风险评价部判定通过步骤720计算的危险度是否满足规定的危险度基准。该危险度基准是对允许范围的危险度进行指定的值,例如可以由风险管理系统的管理者来确定。作为一个例子,在规定的危险度基准为“0.3以下”的情况下,危险度为“0.25”的上述驾驶控制活动被判定为满足该规定的危险度基准。
[0159]
在通过步骤720计算的危险度满足规定的危险度基准的情况下,本处理进入步骤726,在通过步骤720计算的危险度不满足规定的危险度基准的情况下,本处理进入步骤724。
[0160]
在通过步骤720计算的危险度不满足规定的危险度基准的情况下,在步骤724中,活动判定部将驾驶控制活动变更为满足该规定的危险度基准。例如,活动判定部可以将由驾驶控制活动指定的速度、加速度、车距等汽车工作参数变更为更安全的值,以使驾驶控制活动满足该规定的危险度基准。
[0161]
在通过步骤720计算的危险度满足规定的危险度基准的情况下,在步骤726中,认可该驾驶控制活动。
[0162]
接下来,在步骤728中,活动判定部将经步骤726认可的驾驶控制活动或者通过步骤716判定的驾驶控制活动传送到驾驶管理装置。之后,驾驶管理装置可以执行驾驶控制活动,也可以变更驾驶控制活动,还可以放弃驾驶控制活动并执行不同的驾驶控制活动。
[0163]
根据以上说明的风险分析处理700,能够实时地评价有可能阻止汽车行驶的风险,并且能够在存在新的风险的情况下动态地生成新的行驶情景。另外,由此在任意的行驶状况下都能够进行适当的驾驶控制,提高汽车的安全性。
[0164]
接下来,参照图10对本公开的实施方式的驾驶管理装置所执行的处理的流程进行说明。
[0165]
图10是表示本公开的实施方式的驾驶管理装置230所执行的处理的流程的一个例子的图。如上所述,本公开的实施方式的驾驶管理装置230是用于在存在新的风险的情况下动态地生成新的行驶情景并持续地更新情景db224所保存的行驶情景的功能部,如图10所
示,包含第二参数确定部372、情景生成部374、安全条件判定部376及情景更新部378。
[0166]
此外,为了便于说明,图10仅示出了情景管理部226的主要的功能,省略了一部分的功能部的记载。
[0167]
以下,对各个功能部的处理的流程进行说明。
[0168]
首先,在步骤905中,第二参数确定部372从风险分析部的第一参数确定部(例如,图3所示的风险分析部222的第一参数确定部362)所确定的风险参数之中确定没有包含在情景db224所保存的现有的情景中的风险参数作为新的风险参数。
[0169]
接下来,在步骤910中,情景生成部374对由传感器部(例如,图2所示的传感器部212)获取的传感器信息进行分析,从而提取行驶状况信息,该行驶状况信息表示被测定了通过步骤905所确定的新的风险参数的行驶状况。例如,在“平均车辆数”被确定为新的风险参数的情况下,情景生成部374可以通过对传感器信息进行分析来提取“正在大城市的高速路上行驶”这一行驶状况信息。由此,能够判定该新的风险参数是在什么样的行驶状况下产生的。
[0170]
接下来,在步骤915中,情景生成部374通过参照风险db381来判定与通过步骤910提取出的行驶状况对应的风险指标。此处的风险db381可以包含在过去的行驶状况下产生过的风险、为了减轻该风险而事先规定的规则等。风险db381也可以是例如基于过去的行驶状况信息、专业人员的知识而事先制作的数据库。
[0171]
作为一个例子,在“正在大城市的高速路上行驶”这一行驶状况的情况下,情景生成部374可以通过参照风险db381而将“与行人的碰撞”、“交通阻塞”等判定为风险指标。
[0172]
此外,此处判定的风险指标分别也可以与表示该风险指标的重要性的权重建立对应。
[0173]
接下来,在步骤920中,情景生成部374基于通过步骤905确定的新的风险参数、通过步骤910提取出的行驶状况和通过步骤915判定的风险指标,生成新的行驶情景,追加到情景db224中,并且对该新的行驶情景赋予标识。更具体而言,情景生成部374使用规定的api、程序库,将所确定的参数(风险参数、odd参数)、产生这些参数的行驶状况和与该行驶状况对应的风险指标,作为新的行驶情景登记在情景db224中。
[0174]
此外,有时希望在基于该新的行驶情景确定对汽车的驾驶进行控制的驾驶控制活动之前进行进一步的安全性验证。因而,在制作的时间点,该新的行驶情景被赋予推荐进一步的安全性验证的标识。之后,情景管理部226可以在通过用户进行的确认、安全条件的更新等而验证了该新的行驶情景的安全性之后,删除该标识。
[0175]
在某一实施方式中,在对情景管理部226追加了新的行驶情景的情况下,情景管理部226的传送部(在图10中未图示)也可以经由因特网等通信网络将新的行驶情景与正在周边行驶的汽车共享。
[0176]
此外,关于将新的行驶情景与正在周边行驶的汽车共享的情况的细节将参照图13后述,因此在此省略其说明。
[0177]
如上所述,情景管理部226包含安全条件判定部376,该安全条件判定部376用于判定为了减轻特定的风险而使用的安全条件的有效性。在此,安全条件例如可以是用来使在特定的行驶情景下产生的特定的危险减轻、以确保汽车的安全性的对策,其被保存于情景db224。
[0178]
在步骤930中,安全条件判定部376通过基于规定的评价基准来评价与在特定的行驶情景下有可能产生的危险对应的安全条件,从而计算表示各个安全条件的有效性的有效性得分。
[0179]
更具体而言,安全条件判定部376从危险数据库(以下为危险db)945,获取与在特定的行驶情景下有可能产生的危险(hazard)对应的安全条件。此处的危险db945(hazard database)是用来按每一行驶情景而保存该行驶情景下可能产生的危险和用于减轻该危险的危险度的安全条件的数据库。作为一个例子,对于“雨天时”这一行驶情景,危险db945可以包含“汽车打滑所致的碰撞”这一危险和“扩大车距”这一安全条件。
[0180]
安全条件判定部376在获取与特定的危险对应的安全条件之后,基于规定的评价基准对所获取的安全条件进行评价,从而计算表示该安全条件的有效性的有效性得分944。此处的评价基准是为了评价安全条件的有效性而选择的参数。作为一个例子,此处的评价基准可以包含与对象的安全条件对应的危险的发生频率(fh)、与对象的安全条件对应的危险的严重程度(sh)、对象的安全条件成为风险参数的频率(fa)、避免对象的安全条件所对应的危险的效果(er)、用来检测雨量、积雪量及照度等odd参数的有效性(odd1)等,但本公开中的评价基准并不限定于此,可以是用于评价安全对策的有效性的任意的参数。
[0181]
此外,此处的评价基准也可以与表示该评价基准的重要性的权重建立对应。
[0182]
在某一实施方式中,安全条件判定部376也可以按每一评价基准来计算表示各个安全条件的有效性的有效性得分。在此,表示安全条件的有效性的得分通过以下的算式2求出。
[0183]
[算式2]
[0184]
有效性得分=f(λ)*wn[0185]
在此,f(λ)是特定的安全条件在规定的时间内使用的频率的函数,wn是评价基准的权重。
[0186]
图11是表示对本公开的实施方式的安全条件在每一评价基准下的有效性进行表示的安全条件评价表1000的一个例子的图。如图11所示,示出了安全条件1、安全条件2
…
安全条件n等任意数量的安全条件1010在每一评价基准1005下的有效性得分1015。
[0187]
在计算各个安全条件的有效性得分之后,安全条件判定部376输出对各个安全条件计算出的有效性得分944。在某一实施方式中,安全条件判定部376也可以将该有效性得分944传送到情景更新部378。
[0188]
根据以上说明的安全条件评价,能够评价为了减轻特定的风险而使用的安全条件的有效性。由此,能够按每一行驶情景,掌握减轻该行驶情景下的危险的各个安全条件的效果,因此能够通过删除/变更有效性低的安全条件,并且追加有效性更高的安全条件,从而确保汽车的行驶安全性。
[0189]
另外,如上所述,情景管理部226包含用于更新情景db224所保存的现有的行驶情景的情景更新部378。
[0190]
在图10所示的步骤940中,该情景更新部378可以计算例如由第一参数确定部确定的风险参数的影响度,并且基于这些风险参数的影响度、由安全条件判定部376计算的安全条件的有效性得分,更新情景db224所保存的现有的行驶情景。
[0191]
更具体而言,在步骤940中,情景更新部378通过基于汽车的速度、加速度、当前位
置、在周边行驶的汽车的数量等动作条件,对由第一参数确定部确定的风险参数进行分析,从而计算这些风险参数在每一时间下的影响度。此处的影响度是对风险参数与交通事故相关的可能性进行表示的衡量指标,可以表示为“安全”、“存在危险性”、“交通事故的可能性高”等类别,也可以表示为0~1的范围内的数值(更大的值的影响度、即交通事故的可能性更高)。
[0192]
在某一实施方式中,情景更新部378可以使用基于过去的风险参数进行了学习的mlp(multilayer perceptron、多层感知器)等神经网络来计算风险参数在每一时间下的影响度。
[0193]
图12是表示对本公开的实施方式的风险参数在每一时间下的影响度进行表示的参数影响度表1100的一个例子的图。如图12所示,示出了风险参数p1、p2
…
pn等风险参数1105在每一时间段1110中的影响度1115。
[0194]
这样,能够随着时间的流逝而判定特定的风险参数的影响度的变动。
[0195]
接下来,在计算出风险参数的影响度之后,情景更新部378基于所计算的风险参数的影响度、和表示针对通过步骤930计算的安全条件所计算出的有效性的有效性得分944,更新情景db224所保存的现有的行驶情景。在此,情景更新部378也可以基于有效性得分944,调整包含影响度满足规定的影响度基准的风险参数的行驶情景的安全条件。例如,情景更新部378可以在确定包含影响度满足规定的影响度基准的风险参数的行驶情景之后,删除与该行驶情景对应的安全条件中的有效性得分低的安全条件,或者对其进行变更以提高有效性得分。不过,此处的行驶情景的更新并不限定于此,也可以包含追加、删除或变更任意的参数。
[0196]
由此,情景db224所保存的现有的行驶情景始终维持在最新的状态,因此在任意的行驶状况下都能够进行适当的驾驶控制,提高汽车的安全性。
[0197]
接下来,参照图13说明将本公开的实施方式的新的行驶情景与其它汽车共享的情况的一个例子。
[0198]
图13是表示将本公开的实施方式的新的行驶情景与其它汽车共享的情况的一个例子的图。如图13所示,在由情景生成部(例如,图3所示的情景生成部374)生成了新的行驶情景并追加到了汽车205所搭载的本地的情景db224中的情况下,风险管理装置220中的传送部380使本地的情景db224与云240上的情景db1224同步。由此,在汽车侧生成的新的行驶情景还被追加到云240上的情景db1224中。
[0199]
此时,云240上的情景db1224也可以将包含新追加的新的行驶情景的信息的通知发送给汽车205的周边的汽车即周边汽车1205、1210。此处的周边汽车1205、1210例如可以是存在于距汽车205规定距离以内(500米以内、1公里以内)的汽车。
[0200]
由此,周边汽车1205、1210可以将从云240接收到的新的行驶情景登记到本地的情景db中,并基于该新的行驶情景来判定用于确保行驶安全性的驾驶控制活动。
[0201]
这样,通过将由一辆汽车生成的行驶情景共享给其它的周边汽车,从而在例如雨天时、大雪等恶劣天气的情况下,能够更高效地判定有可能产生的风险、用于减轻该风险的驾驶控制活动。
[0202]
此外,在图13中,作为一个例子,说明了将包含新追加的新的行驶情景的信息的通知发送给两辆周边汽车的情况,但本公开并不限定于此,该通知可以被发送给任意数量的
汽车。
[0203]
另外,在图13中,作为一个例子,说明了经由云240的情景db1224将包含新的行驶情景的信息的通知从汽车205发送给周边汽车1205、1210的情况,但本公开并不限定于此,汽车205的传送部380也可以不经由云240,而是经由lan等通信网络直接将包含新的行驶情景的信息的通知发送给周边汽车1205、1210。
[0204]
根据以上说明的风险管理装置、风险管理方法及风险管理系统,通过实时地评价有可能阻止汽车行驶的风险,并且在存在新的风险的情况下动态地生成新的行驶情景,由此在任意的行驶状况下都能够进行适当的驾驶控制,提高汽车安全性。另外,以上将主要以提高汽车的安全性为目的的情况作为一个例子对本公开的方式进行了说明,但本公开并不限定于此,除了汽车的安全性以外,还可以用于提高汽车的乘客的舒适性。
[0205]
以上对本发明的实施方式进行了说明,但本发明并不限定于上述的实施方式,能够在不脱离本发明的主旨的范围内进行各种变更。
[0206]
附图标记说明
[0207]
200:风险管理系统;205:汽车;210:信息管理装置;212:传感器部;214:对象检测部;220:风险管理装置;222:风险分析部;224:情景db;226:情景管理部;230:驾驶管理装置;232:行驶路线确定部;234:驾驶控制部;240:云。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。