技术特征:
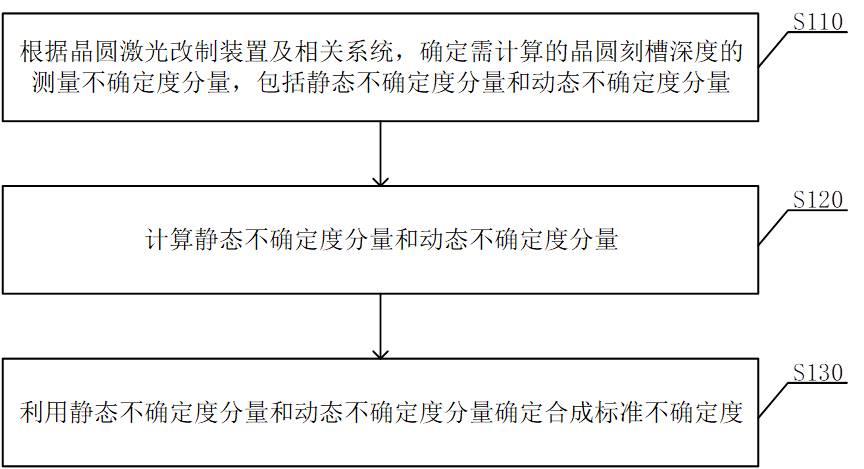
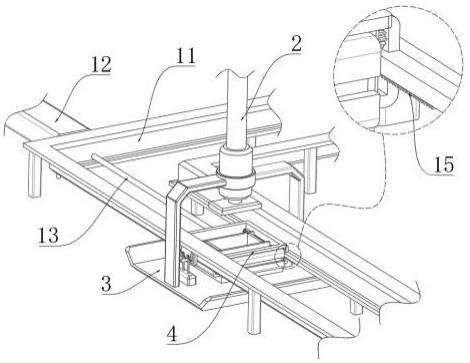
1.一种晶圆激光改制中改制深度测量不确定度的确定方法,其特征在于,包括:根据晶圆激光改制装置及相关系统,确定需计算的晶圆改制深度测量不确定度的分量,包括静态不确定度分量和动态不确定度分量;计算所述静态不确定度分量和所述动态不确定度分量;利用所述静态不确定度分量和动态不确定度分量确定合成标准不确定度。2.根据权利要求1所述的方法,其特征在于,在确定合成标准不确定度之后,还包括:利用如下方式确定扩展不确定度:,其中,为扩展不确定度,为合成标准不确定度,为包含因子,取值为正数。3.根据权利要求1或2所述的方法,其特征在于,所述晶圆激光改制装置包括激光器、位移台和导轨副,所述导轨副包括重叠放置的横向移动导轨副和纵向移动导轨副,所述横向移动导轨副和纵向移动导轨副分别设置有两个导轨,任意导轨上设置有两个滑块,所述位移台设置有位移传感器;所述位移台通过所述滑块与所述横向移动导轨副或所述纵向移动导轨副中的一个导轨副相连,所述横向移动导轨副与所述纵向移动导轨副之间通过所述滑块连接,通过所述滑块在导轨副上进行滑动;所述激光器用于发出激光对晶圆进行改制,所述位移台用于承载晶圆,所述导轨副用于移动晶圆,所述位移传感器用于测量晶圆改制深度。4.根据权利要求3所述的方法,其特征在于,计算所述静态不确定度分量,进一步包括:计算所述位移传感器测量引起的不确定度、所述激光器输出引起的不确定度和所述晶圆、位移台与导轨的形位误差引起的不确定度中的至少一种;利用、、中的至少一种计算。5.根据权利要求4所述的方法,其特征在于,计算所述位移传感器测量引起的不确定度,进一步包括:计算所述位移传感器重复性测量晶圆表面引起的不确定度和所述位移传感器重复性测量晶圆改制槽深度引起的不确定度、分辨力引起的不确定度、垂直度误差引起的不确定度、温度漂移引起的不确定度、零点漂移引起的不确定度、灵敏度漂移引起的不确定度、电磁兼容引起的不确定度、回程误差引起的不确定度中的至少一种;利用、、、、、、、和中的至少一种计算。6.根据权利要求4所述的方法,其特征在于,计算所述激光器输出引起的不确定度,进一步包括:计算所述激光器聚焦深度引起的不确定度和聚焦像差引起的不确定度中的至少一种;利用和中的至少一种计算。
7.根据权利要求4所述的方法,其特征在于,计算所述晶圆、位移台与导轨的形位误差引起的不确定度,进一步包括:计算所述晶圆表面均匀性引起的不确定度、基台表面平面度引起的不确定度、温度引起的位移台和导轨的不确定度、导轨直线度误差引起的不确定度中的至少一种;利用、、和中的至少一种计算。8.根据权利要求3所述的方法,其特征在于,计算所述动态不确定度分量,进一步包括:计算振动引起的不确定度、横向导轨的滑块形变量引起的位移不确定度和导轨弯曲变形导致的测量不确定度中的至少一种;利用、和中的至少一种计算。9.根据权利要求1所述的方法,其特征在于,利用如下方式确定合成标准不确定度:,其中,为合成标准不确定度,为静态不确定度。10.一种晶圆激光改制中改制深度测量不确定度的确定设备,其特征在于,包括:处理器以及与所述处理器连接的存储器;其中,所述存储器存储有可被所述处理器执行的指令,所述指令被所述处理器执行,以使所述处理器执行如权利要求1-9中任意一项所述的晶圆激光改制中改制深度测量不确定度的确定方法。
技术总结
本发明涉及半导体加工设备领域,具体涉及一种晶圆激光改制中改制深度测量不确定度的确定方法及设备,该方法根据晶圆激光改制装置及改制深度测量设备,确定需计算的改制槽晶圆改制深度测量不确定度的分量,包括静态不确定度分量和动态不确定度分量;计算所述静态不确定度分量和所述动态不确定度分量;利用所述静态不确定度分量和动态不确定度分量确定合成标准不确定度。本发明通过对晶圆激光改制的结构进行分解,形成了较为完善的不确定度来源分析,由此综合全部的不确定度分量得到合成标准不确定度,通过对上述不确定度分量进行评估和分析,可以获取影响不确定度的主要分量,进而对其主要分量进行控制,从而可以用于对晶圆改制深度进行精确控制。制深度进行精确控制。制深度进行精确控制。
技术研发人员:蒋继乐 周惠言 寇明虎
受保护的技术使用者:北京特思迪半导体设备有限公司
技术研发日:2023.06.19
技术公布日:2023/7/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。