1.本发明涉及基板处理装置及基板处理方法。
背景技术:
2.在液晶显示器、有机el显示器等fpd(flatpanel display,平板显示器)的制造工序中,在由玻璃等构成的基板上形成图像元件或电路元件等。在这样的元件等的形成中,对玻璃基板使用在真空环境下进行加热处理、成膜处理、清洗处理等的等离子体处理的溅射装置或沉积装置等基板处理装置。
3.作为基板处理装置,使用载体循环型的直列溅射装置。该载体循环型的直列溅射装置具有将玻璃基板导入真空中的装载室、配置有溅射靶的成膜室、用于使玻璃基板从真空中返回大气的卸载室等。而且,玻璃基板载置在被称为载体的运送台上,在构成直列溅射装置的各室之间移动。
4.另外,作为溅射装置,还公知有立式单片装置(固定成膜装置)的结构和往复式溅射装置。
5.在往复式溅射装置中,一个真空腔室作为兼作玻璃基板的导入和取出的装载及卸载室发挥功能。
6.近年来,随着显示器的大型化,对一边3000mm以上的玻璃基板进行处理。因此,作为载置玻璃基板的载体,多使用将玻璃基板在大致铅直方向立起的状态下保持的载体,即所谓的立式载体。通过使用这样的立式载体,能够将溅射装置的设置面积保持在最小限度。立式载体具备框架。框架与玻璃基板的周缘部抵接并保持玻璃基板。在该框架上形成有使玻璃基板的一方的成膜面侧露出的开口部。
7.在将玻璃基板投入立式溅射装置时,在将玻璃基板保持在立式载体的状态下,向真空腔室内运送立式载体。另外,用立式溅射装置处理结束的玻璃基板在保持于立式载体的状态下从真空腔室内被运送到外部。另外,玻璃基板在载置在立式载体上的状态下,在溅射装置的各室之间移动。
8.作为载体的运送,已知有专利文献1所公开的技术。
9.专利文献1:国际公开第2012/140801号
10.在上述那样的真空腔室中的玻璃基板的处理中,为了防止处理特性的下降,优选没有颗粒附着到玻璃基板。然而,在真空腔室的内部和外部运送的载体以及处理前的玻璃基板上可能附着有颗粒,具有想要去除颗粒的要求。进而,在成膜处理等的等离子体处理后的玻璃基板和载体上,有时会因不需要的成膜材料等原因而附着有颗粒,具有想要去除这样的颗粒的要求。
11.本发明是鉴于上述情况而完成的,旨在达到以下目的。
12.1、在立式运送型的真空处理中,削减附着在玻璃基板和载体上的颗粒。
13.2、提高去除颗粒的效率。
14.3、有效地进行玻璃基板上的颗粒去除和载体上的颗粒去除。
15.4、应对基板尺寸的大型化。
16.5、防止从玻璃基板和载体去除的颗粒的再附着。
17.6、可对应于处理工序的阶段,应对有效的颗粒去除。
18.7、抑制静电破坏的发生。
技术实现要素:
19.(1)本发明的一个方案所涉及的基板处理装置,通过以下的技术方案解决上述问题,其包括:
20.真空腔室,用于对保持在载体上的基板实施真空处理;
21.立式运送机构,用于使所述基板和所述载体立起并运送;和
22.颗粒去除机构,用于去除附着在所述载体和所述基板上的颗粒,
23.所述颗粒去除机构具备:
24.喷出喷嘴,用于向由所述立式运送机构运送的所述载体和所述基板喷出空气;和
25.抽吸喷嘴,用于抽吸向所述载体和所述基板喷出的空气。
26.(2)本发明的一个方案所涉及的基板处理装置,在上述(1)中,
27.所述颗粒去除机构可用于去除运入所述真空腔室或从所述真空腔室运出的所述载体和所述基板的颗粒。
28.(3)本发明的一个方案所涉及的基板处理装置,在上述(1)或(2)中,
29.所述颗粒去除机构可被配置在比所述真空腔室的密闭机构更靠外部处,并且以与所述密闭机构的开闭动作连动的方式被驱动。
30.(4)本发明的一个方案所涉及的基板处理装置,在上述(1)至(3)中任一项中,所述颗粒去除机构可具有除电机构。
31.(5)本发明的一个方案所涉及的基板处理方法,通过以下的技术方案解决上述问题,其对在真空腔室的内部被载体保持的基板实施真空处理,包括:
32.真空处理工序,对在所述真空腔室的内部被所述载体保持的所述基板实施真空处理;
33.运送工序,通过立式运送机构使所述基板和所述载体立起并运送;和
34.颗粒去除工序,通过颗粒去除机构去除附着在所述载体和所述基板上的颗粒,
35.在所述颗粒去除工序中,从喷出喷嘴向由所述立式运送机构运送的所述载体和所述基板喷出空气,并且通过抽吸喷嘴抽吸向所述载体和所述基板喷出的空气。
36.(6)本发明的一个方案所涉及的基板处理方法,在所述(5)中,
37.所述颗粒去除工序可以去除在所述运送工序中运入所述真空腔室或从所述真空腔室运出的所述载体和所述基板的颗粒。
38.(7)本发明的一个方案所涉及的基板处理方法,在所述(5)或(6)中,
39.在所述颗粒去除工序中,可在比所述真空腔室的密闭机构更靠外部处,以与所述密闭机构的开闭动作连动的方式驱动所述颗粒去除机构。
40.(8)本发明的一个方案所涉及的基板处理方法,在所述(5)至(7)中任一项中,在所述颗粒去除工序中,可通过除电机构进行除电。
41.(1)本发明的一个方案所涉及的基板处理装置,包括:
42.真空腔室,用于对保持在载体上的基板实施真空处理;
43.立式运送机构,用于使所述基板和所述载体立起并运送;和
44.颗粒去除机构,用于去除附着在所述载体和所述基板上的颗粒,
45.所述颗粒去除机构具备:
46.喷出喷嘴,用于向由所述立式运送机构运送的所述载体和所述基板喷出空气;和
47.抽吸喷嘴,用于抽吸向所述载体和所述基板喷出的空气。
48.由此,在成膜等真空处理前,能够在去除附着在基板和载体上的颗粒的状态下运入真空腔室。或者,在成膜等真空处理中,能够在去除附着在基板和载体上的颗粒的状态下从真空腔室运出基板和载体。因此,能够降低后续工序中的颗粒的影响,防止使用真空处理的基板的制造特性的下降,提高制造效率。
49.在本发明的一个方案中,作为基板,可以使用大型的玻璃基板。例如,将玻璃基板(基板)保持到载体,例如以如下方式进行。
50.由具备吸盘等的多关节机械臂拾取水平运送来的玻璃基板。在水平的载体的框架上载置玻璃基板。同时进行载体和玻璃基板的对准。此时,玻璃基板通过安装在框架上的夹具等,将基板面的周缘部按压在框架上而被把持。接着,使基板与载体一起旋转成沿铅直方向立起的状态。
51.或者,由具备吸盘等的多关节机械臂拾取水平运送来的基板。接着,使玻璃基板旋转成沿铅直方向立起的状态,将玻璃基板竖立靠置在载体的框架上。而且,当多关节机械臂解除玻璃基板的吸附时,玻璃基板因自重而沉入,直至玻璃基板的底边与框架下端的承受部接触的位置。然后,通过安装在框架上的夹具等,以将基板面的周缘部按压到框架的方式把持玻璃基板。
52.这样,基板在由载体保持且以主面呈大致竖直的方式立起的状态下被立式运送。
53.这样立起的基板和保持基板的载体上可能附着有颗粒。如果在有颗粒附着的状态下将基板和载体运入真空腔室的内部,则在基板的被处理面上有颗粒的情况下,成膜等真空处理的性能有可能下降。而且,附着在基板或载体上的颗粒有可能在真空腔室内部中的运送时飞散而附着在其他地方。特别是,如果附着在载体上的颗粒的附着位置保持原样而不变,则也有不影响真空处理的情况。但是,在颗粒的附着位置改变为基板的被处理面的情况下,真空处理的性能会下降。
54.因此,在本发明的一个方案中,可通过从喷出喷嘴吹出的空气,使附着在载体或基板上的颗粒离开。进而,从抽吸喷嘴抽吸可能包含该颗粒的空气。由此,能够防止颗粒对载体或基板的再附着。也就是,能够去除并降低附着在载体或基板上的颗粒。此外,在本说明书中,“载体或基板”这一表述包括载体或基板中的一方、以及载体和基板这双方。
55.在此,在本发明的一个方案中,优选在运入真空腔室之前,也就是在真空腔室的门阀等密闭机构的外侧去除颗粒。而且,去除时离开载体或基板的颗粒不会再附着在真空腔室的内部。因此,与在真空腔室内部进行颗粒去除的情况相比,能够抑制真空处理性能的下降。
56.进而,优选在真空处理后从真空腔室运出载体和基板后,也就是在真空腔室的门阀等密闭机构的外侧去除颗粒。而且,去除时离开载体或基板的颗粒不会再附着在真空腔室的内部。因此,与在真空腔室内部进行颗粒去除的情况相比,能够抑制对下一个处理的基
板的真空处理性能的下降。
57.(2)本发明的一个方案所涉及的基板处理装置,在上述(1)中,
58.所述颗粒去除机构可以去除运入所述真空腔室或从所述真空腔室运出的所述载体和所述基板的颗粒。
59.由此,能够在运入真空腔室之前,也就是在真空腔室的门阀等密闭机构的外侧去除颗粒。而且,去除时离开载体或基板的颗粒不会再附着在真空腔室的内部。因此,与在真空腔室内部进行颗粒去除的情况相比,能够抑制真空处理性能的下降。
60.另外,优选在真空处理后从真空腔室运出基板和载体后,也就是在真空腔室的门阀等密闭机构的外侧去除颗粒。而且,去除时离开载体或基板的颗粒不会再附着在真空腔室的内部。因此,与在真空腔室内部进行颗粒去除的情况相比,能够抑制对下一个处理的基板的真空处理性能的下降。
61.(3)本发明的一个方案所涉及的基板处理装置,在上述(1)或(2)中,
62.所述颗粒去除机构可被配置在比所述真空腔室的密闭机构更靠外部处,并且以与所述密闭机构的开闭动作连动的方式被驱动。
63.由此,能够在运入真空腔室之前,也就是在真空腔室的门阀等密闭机构的外侧去除颗粒。而且,在利用颗粒去除机构的驱动去除颗粒时,同步地闭塞密闭机构。由此,离开载体或基板的颗粒不会再附着在真空腔室的内部。因此,与在真空腔室内部进行颗粒去除的情况相比,能够抑制真空处理性能的下降。
64.另外,优选在真空处理后从真空腔室运出基板和载体后,也就是在真空腔室的门阀等密闭机构的外侧去除颗粒。而且,在利用颗粒去除机构的驱动去除颗粒时,同步地闭塞密闭机构。由此,离开载体或基板的颗粒不会再附着在真空腔室的内部。因此,与在真空腔室内部进行颗粒去除的情况相比,能够抑制对下一个处理的基板的真空处理性能的下降。
65.(4)本发明的一个方案所涉及的基板处理装置,在上述(1)至(3)中任一项中,
66.所述颗粒去除机构可具有除电机构。
67.由此,在真空腔室的门阀等密闭机构的外侧去除颗粒时,能够提高颗粒去除效率。因此,能够进一步抑制真空处理性能的下降。
68.在此,作为除电机构,可以进行利用离子发生器的除电、使用来自利用离子发生器的喷出喷嘴的空气的除电、利用微波照射的除电等。由此,除电机构还能够包括中和颗粒电荷的作用、或者通过超声波等的冲击提高颗粒去除效果的作用。
69.(5)本发明的一个方案所涉及的基板处理方法,对在真空腔室的内部被载体保持的基板实施真空处理,包括:
70.真空处理工序,对在所述真空腔室的内部被所述载体保持的所述基板实施真空处理;
71.运送工序,通过立式运送机构使所述基板和所述载体立起并运送;和
72.颗粒去除工序,通过颗粒去除机构去除附着在所述载体和所述基板上的颗粒,
73.在所述颗粒去除工序中,从喷出喷嘴向由所述立式运送机构运送的所述载体和所述基板喷出空气,并且通过抽吸喷嘴抽吸向所述载体和所述基板喷出的空气。
74.由此,在本发明的一个方案中,对保持在载体上且以主面呈大致竖直的方式立起的状态下立式运送的基板实施颗粒去除工序。在颗粒去除工序中,通过从喷出喷嘴吹到基
板上的空气,能够使附着在载体或基板上的颗粒离开。进而,从抽吸喷嘴抽吸可能包含该颗粒的空气。由此,能够防止颗粒对载体或基板的再附着。也就是,能够去除并降低附着在载体或基板上的颗粒。
75.在此,优选在进行真空腔室中的真空处理工序之前,也就是在真空腔室的门阀等密闭机构的外侧进行颗粒去除工序,去除颗粒。而且,去除时离开载体或基板的颗粒不会再附着在真空腔室的内部。因此,与在真空腔室内部进行颗粒去除的情况相比,能够抑制真空处理工序中的性能的下降。
76.进而,优选在进行了真空腔室中的真空处理工序之后,也就是在真空腔室的门阀等密闭机构的外侧进行颗粒去除工序,去除颗粒。而且,去除时离开载体或基板的颗粒不会再附着在真空腔室的内部。因此,与在真空腔室内部进行颗粒去除的情况相比,能够抑制对下一个处理的基板的真空处理工序的性能的下降。
77.(6)本发明的一个方案所涉及的基板处理方法,在所述(5)中,
78.所述颗粒去除工序可以去除在所述运送工序中运入所述真空腔室或从所述真空腔室运出的所述载体和所述基板的颗粒。
79.由此,能够在进行真空腔室中的真空处理工序之前,也就是在真空腔室的门阀等密闭机构的外侧进行颗粒去除工序,去除颗粒。而且,去除时离开载体或基板的颗粒不会再附着在真空腔室的内部。因此,与在真空腔室内部进行颗粒去除的情况相比,能够抑制真空处理工序中的性能的下降。
80.进而,能够在进行真空腔室中的真空处理工序之后,也就是在真空腔室的门阀等密闭机构的外侧进行颗粒去除工序,去除颗粒。而且,去除时离开载体或基板的颗粒不会再附着在真空腔室的内部。因此,与在真空腔室内部进行颗粒去除的情况相比,能够抑制对下一个处理的基板的真空处理工序的性能的下降。
81.(7)本发明的一个方案所涉及的基板处理方法,在所述(5)或(6)中,
82.在所述颗粒去除工序中,可以在比所述真空腔室的密闭机构更靠外部处,以与所述密闭机构的开闭动作连动的方式驱动所述颗粒去除机构。
83.由此,能够在进行真空腔室中的真空处理工序之前,也就是在真空腔室的门阀等密闭机构的外侧进行颗粒去除工序,去除颗粒。而且,在利用颗粒去除机构的驱动去除颗粒时,同步地闭塞运送工序中的密闭机构。由此,离开载体或基板的颗粒不会再附着在真空腔室的内部。因此,与在真空腔室内部进行颗粒去除的情况相比,能够抑制真空处理性能的下降。
84.另外,能够在真空处理后进行真空腔室中的真空处理工序后,也就是在真空腔室的门阀等密闭机构的外侧进行颗粒去除工序,去除颗粒。而且,在利用颗粒去除机构的驱动去除颗粒时,同步地闭塞运送工序中的密闭机构。由此,离开载体或基板的颗粒不会再附着在真空腔室的内部。因此,与在真空腔室内部进行颗粒去除的情况相比,能够抑制对下一个处理的基板的真空处理性能的下降。
85.(8)本发明的一个方案所涉及的基板处理方法,在所述(5)至(7)中任一项中,
86.在所述颗粒去除工序中,可通过除电机构进行除电。
87.由此,在颗粒去除工序中,同时使用除电工序,从而在真空腔室的门阀等密闭机构的外侧去除颗粒时,能够提高颗粒去除效率。因此,能够进一步抑制真空处理性能的下降。
88.所述喷出喷嘴的喷出方向可以朝向所述基板的被处理面且相对于所述基板的运送方向具有规定的角度。
89.所述喷出喷嘴的喷出方向是在所述基板的运送方向上朝向所述抽吸喷嘴的方向。
90.所述喷出喷嘴的喷出方向可以朝向所述基板的被处理面且相对于所述基板的被处理面的法线方向具有规定的角度。
91.所述喷出喷嘴的喷出方向可以朝向与所述真空腔室的所述密闭机构相反的方向且具有规定的角度。
92.相对于所述抽吸喷嘴,可以在所述基板的运送方向上朝向与所述喷出喷嘴和所述真空腔室的所述密闭机构相反的方向的位置上配置第二喷出喷嘴。
93.所述第二喷出喷嘴的喷出方向是在所述基板的运送方向上朝向所述抽吸喷嘴的方向。
94.所述喷出喷嘴可以相对于与所述基板的运送方向正交的方向排列配置为规定数量。在这种情况下,多个所述喷出喷嘴的喷出方向可以都设定为大致平行。
95.可沿着所述基板的运送方向配置有单组或多组的所述喷出喷嘴和所述抽吸喷嘴的组。
96.可在作为所述基板的正反两面的运送位置的两侧配置有所述喷出喷嘴和所述抽吸喷嘴的组。
97.或者,可在与作为所述基板的被处理面的正面对应的运送位置的一侧配置有所述喷出喷嘴和所述抽吸喷嘴的组。
98.多个所述喷出喷嘴在上下方向上,下部侧的配置密度设定得比上部侧高。与此同时,抽吸喷嘴的空气抽吸能力在下部侧设定得比上部侧高。
99.多个所述喷出喷嘴和抽吸喷嘴沿着载体和基板的面被配置为能够在上下方向上与载体和基板的整个面相同或比其更长的区域中进行空气喷出和空气抽吸。
100.多个所述喷出喷嘴和抽吸喷嘴也可以关于向载体的喷出和向基板的喷出,不同地设定空气喷出量、空气压力及空气喷出速度等。另外,在各个喷出喷嘴中,也可以设定为喷出方向根据基板的运送位置而变化。
101.在各个喷出喷嘴中,也可以将空气喷出量、空气压力及空气喷出速度等设定为根据基板的运送位置而变化。
102.进而,还可以根据真空处理工序的经过,进行在附着量变大时增大空气喷出量、空气压力及空气喷出速度等的设定。
103.可以在运送工序中在基板处于规定区域的期间对应地进行利用喷出喷嘴的空气喷出。进而,可以在运送工序中在真空腔室的密闭机构处于关闭状态的期间对应地进行利用喷出喷嘴的空气喷出。
104.另外,利用抽吸喷嘴的空气抽吸动作可以在运送工序的全部时间中断续地或连续地进行。
105.利用除电机构的除电可以设定为与喷出喷嘴的空气喷出同步或与空气喷出对应地进行。
106.根据本发明的一个方案,能够起到以下效果:能够提供一种能够削减在真空处理中附着在基板的被处理面上的颗粒来提高真空处理的处理特性的基板处理装置及基板处
理方法。
附图说明
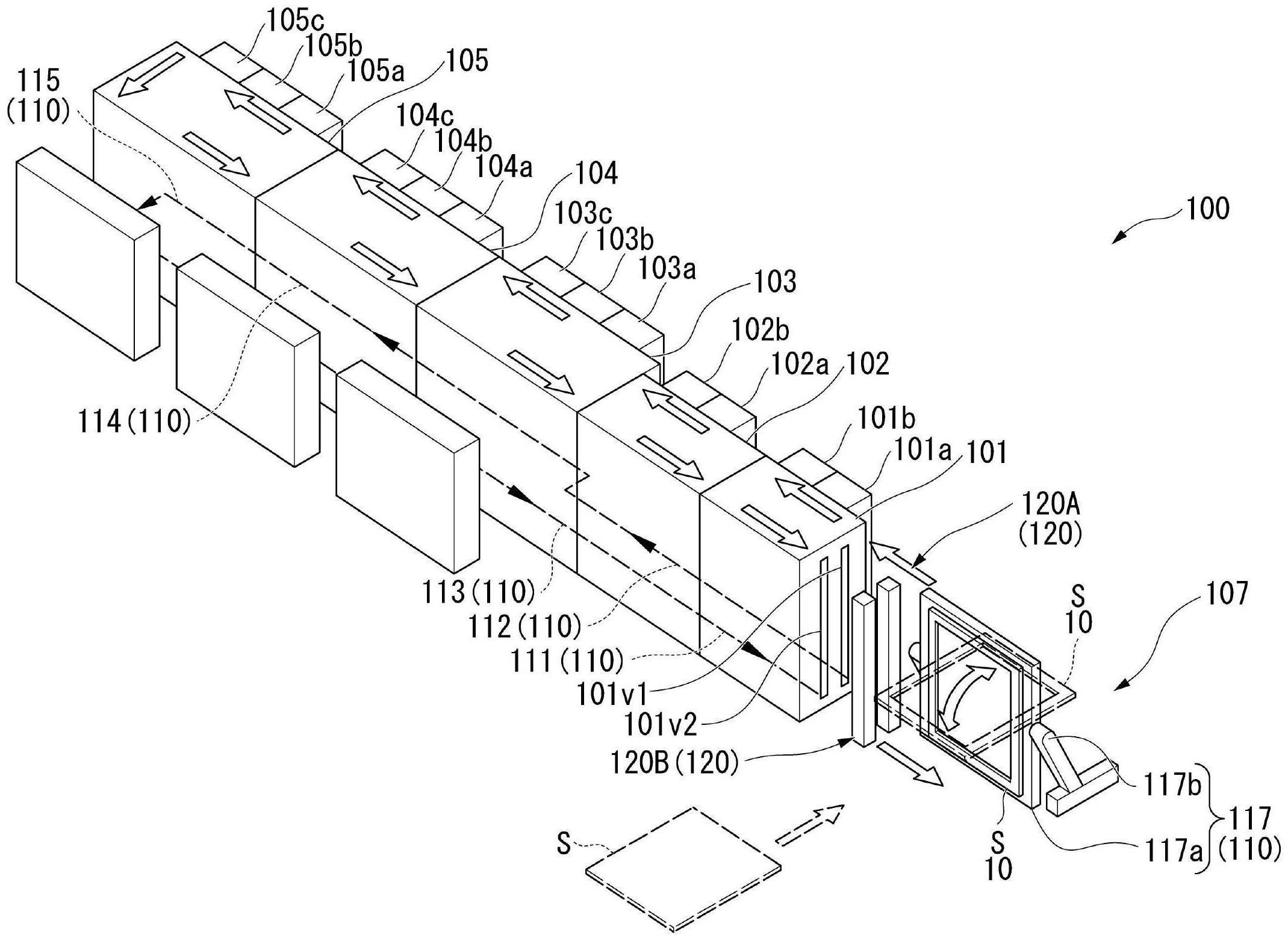
107.图1是表示本发明的第一实施方式所涉及的基板处理装置的立体图。
108.图2是表示本发明的第一实施方式所涉及的基板处理装置中的载体和基板的移动的示意图。
109.图3是表示本发明的第一实施方式所涉及的基板处理装置中的载体和基板的分解立体图。
110.图4是表示本发明的第一实施方式所涉及的基板处理装置中的颗粒去除机构的俯视示意图。
111.图5是表示本发明的第一实施方式所涉及的基板处理装置中的颗粒去除机构的侧面示意图。
112.图6是表示本发明的第一实施方式所涉及的基板处理方法的流程图。
113.图7是表示本发明的第一实施方式所涉及的基板处理方法的流程图。
114.图8是表示本发明的第二实施方式所涉及的基板处理装置中的颗粒去除机构的俯视示意图。
115.图9是表示本发明的第三实施方式所涉及的基板处理装置中的颗粒去除机构的俯视示意图。
具体实施方式
116.以下,根据附图说明本发明的第一实施方式所涉及的基板处理装置及基板处理方法。
117.图1是表示本实施方式中的基板处理装置的立体图。图2是表示本实施方式的基板处理装置中的基板和载体的移动的示意图。在图中,附图标记100是基板处理装置。
118.本实施方式所涉及的基板处理装置100是能够对玻璃基板(基板)s进行往复式真空处理的装置。作为真空处理,除了产生等离子体的等离子体处理、例如溅射处理、成膜处理之外,还可以进行清洗处理、氧化处理等表面处理。
119.如图1、图2所示,本实施方式所涉及的基板处理装置100具有:装载及卸载室101、预加热室102、多个成膜室(真空处理室、溅射腔室)103~105、立式运送机构110和颗粒去除机构120。这些装载及卸载室101、预加热室102和多个成膜室(真空处理室、成膜部)103~105构成真空腔室。
120.如图1和图2所示,在装载及卸载室101中设置有运送机构111、检测机构101a和排气机构101b。
121.运送机构111构成立式运送机构110。运送机构111将从基板处理装置的外部运入的玻璃基板s和载体10向预加热室102运送。运送机构111将从预加热室102运入的玻璃基板s和载体10向外部运送。
122.检测机构101a是能够检测装载及卸载室101的内部的压力和气体组成、基板温度、以及后述的玻璃基板s和载体10的运送位置的传感器。排气机构101b为对装载及卸载室101的内部进行粗抽真空的旋转泵等。装载及卸载室101通过密闭机构101d与预加热室102连
接。
123.装载及卸载室101可通过门阀等密闭机构101v1(101v)和密闭机构101v2(101v)向外部开放及闭塞。密闭机构101v1(101v)在向装载及卸载室101运入时被开闭。密闭机构101v2(101v)在从装载及卸载室101运出时被开闭。
124.如图1、图2所示,在预加热室102中设置有运送机构112、检测机构102a、排气机构102b和温度调节机构102c。
125.运送机构112构成立式运送机构110。运送机构112将从装载及卸载室101运入的玻璃基板s和载体10向第一成膜室103运送。运送机构111将从第一成膜室103运入的玻璃基板s和载体10向装载及卸载室101运送。
126.检测机构102a是能够检测预加热室102的内部的压力和气体组成、基板温度、以及后述的玻璃基板s和载体10的运送位置的传感器。排气机构102b为对预加热室102的内部进行粗抽真空的旋转泵等。预加热室102通过密闭机构102d与第一成膜室103连接。温度调节机构102c例如为加热器,将运送到第一成膜室103的玻璃基板s加热到规定的温度。
127.在第一成膜室103中设置有运送机构113、检测机构103a、排气机构103b、温度调节机构103c、具有靶103t的阴极电极(背板)103ca、电源103p和气体导入机构103g。
128.运送机构113构成立式运送机构110。运送机构113能够维持从预加热室102运送来的玻璃基板s和载体10的姿势。例如,运送机构113能够在成膜中靶103t与玻璃基板s相对置的位置上维持(保持)玻璃基板s和载体10的姿势。运送机构113能够将玻璃基板s向第二成膜室104运出。另外,运送机构113能够将玻璃基板s向预加热室102运出。
129.检测机构103a是能够检测第一成膜室103的内部的压力和气体组成、基板温度、以及后述的玻璃基板s和载体10的运送位置的传感器。靶103t由具有在玻璃基板s上成膜具有规定的特性的层所需的组成的材料构成。电源103p对具有靶103t的阴极电极103ca施加规定的电位的溅射电压。
130.气体导入机构103g在第一成膜室103的内部以规定的流量分别导入成膜气体、载气等气氛气体。排气机构103b是对第一成膜室103的内部抽高真空的涡轮分子泵、低温捕集器等。温度调节机构103c例如为加热器,将位于第一成膜室103的玻璃基板s加热到规定的温度。
131.这些阴极电极103ca、电源103p、气体导入机构103g、排气机构103b至少具有用于供给成膜规定的层的材料的结构,或者具有用于供给用于进行规定的真空处理的气氛的结构。
132.作为一例,在进行氧化处理时,气体导入机构103g也可以具备气体激发机构。气体激发机构用于激发从气体导入机构103g向第一成膜室103的内部供给的气体,使之成为激发氧化气体。在此,激发氧化气体是指等离子体、自由基、离子等的状态。
133.第一成膜室103通过密闭机构103d与第二成膜室104连接。
134.在第二成膜室104中设置有运送机构114、检测机构104a、排气机构104b、温度调节机构104c、具有靶104t的阴极电极(背板)104ca、电源104p和气体导入机构104g。
135.运送机构114构成立式运送机构110。运送机构114能够维持从第一成膜室103运送来的玻璃基板s和载体10的姿势。例如,运送机构114能够在成膜中靶104t与玻璃基板s相对置的位置上维持(保持)玻璃基板s和载体10的姿势。运送机构114能够将玻璃基板s向第三
成膜室105运出。另外,运送机构114能够将玻璃基板s向第一成膜室103运出。
136.检测机构104a是能够检测第二成膜室104的内部的压力和气体组成、基板温度、以及后述的玻璃基板s和载体10的运送位置的传感器。靶104t由具有在玻璃基板s上成膜具有规定的特性的层所需的组成的材料构成。电源104p对具有靶104t的阴极电极104ca施加规定的电位的溅射电压。
137.气体导入机构104g在第二成膜室104的内部以规定的流量分别导入成膜气体、载气等气氛气体。排气机构104b是对第二成膜室104的内部抽高真空的涡轮分子泵、低温捕集器等。温度调节机构104c例如为加热器,将位于第二成膜室104的玻璃基板s加热到规定的温度。
138.这些阴极电极104ca、电源104p、气体导入机构104g、排气机构104b例如具有用于供给成膜与在第一成膜室中成膜的层不同组成的层的材料的结构,或者具有用于供给用于进行规定的真空处理的气氛的结构。
139.作为一例,在进行氧化处理时,气体导入机构104g也可以具备气体激发机构。气体激发机构激发从气体导入机构104g向第二成膜室104的内部供给的气体,使之成为激发氧化气体。在此,激发氧化气体是指等离子体、自由基、离子等的状态。
140.第二成膜室104通过密闭机构104d与第三成膜室105连接。
141.在第三成膜室105中设置有运送机构115、检测机构105a、排气机构105b、温度调节机构105c、具有靶105t的阴极电极(背板)105ca、电源105p和气体导入机构105g。
142.运送机构115构成立式运送机构110。运送机构115能够维持从第二成膜室104运送来的玻璃基板s和载体10的姿势。例如,运送机构115能够在成膜中靶105t与玻璃基板s相对置的位置上维持(保持)玻璃基板s和载体10的姿势。运送机构115能够将玻璃基板s向第二成膜室104运出。
143.另外,运送机构115在玻璃基板s与靶105t相对置的状态下,能够改变相互对置的玻璃基板s与靶105t的相对距离。运送机构115能够使玻璃基板s从运送去路横穿到运送回路。第三成膜室105被构造为往复式的基板处理装置100中的横穿室。
144.检测机构105a是能够检测第三成膜室105的内部的压力和气体组成、基板温度、以及后述的玻璃基板s和载体10的运送位置的传感器。靶105t由具有在玻璃基板s上成膜具有规定的特性的层所需组成的材料构成。电源105p对具有靶105t的阴极电极105ca施加规定的电位的溅射电压。
145.气体导入机构105g在第三成膜室105的内部以规定的流量分别导入成膜气体、载气等气氛气体。排气机构105b是对第三成膜室105的内部抽高真空的涡轮分子泵、低温捕集器等。温度调节机构105c例如为加热器,将位于第三成膜室105的玻璃基板s加热到规定的温度。
146.这些阴极电极105ca、电源105p、气体导入机构105g、排气机构105b例如具有用于供给成膜与在第一成膜室103和第二成膜室104中成膜的层不同组成的层的材料的结构,或者具有用于供给用于进行规定的真空处理的气氛的结构。
147.作为一例,在进行氧化处理时,气体导入机构105g也可以具备气体激发机构。气体激发机构激发从气体导入机构105g向第三成膜室105的内部供给的气体,使之成为激发氧化气体。在此,激发氧化气体是指等离子体、自由基、离子等的状态。
148.图3是表示在本实施方式的基板处理装置中运送的基板和载体的分解立体图。
149.立式运送机构110能够在玻璃基板s的主面竖直立起的状态下进行立式运送。立式运送机构110在由载体10支撑玻璃基板s的状态下进行立式运送。
150.载体10在对例如玻璃基板s的基板实施成膜等时,在被称为载体10的框体上载置玻璃基板s,通过在后述的输送机运送载体10的同时进行适当的处理。此外,作为玻璃基板s,也可以适用一边为3000mm以上的薄壁玻璃基板或树脂基板等。
151.载体10例如在构成立式运送型的基板处理装置100的多个真空腔室101~105、进行大气压环境下的运送的大气运送输送机等之间循环运送。此时,载体10大致沿着上边及下边在水平方向上被运送。
152.载体10例如用于载体循环型的直列式溅射装置。另外,载体10也可以适用于往复式溅射装置。另外,载体10也可以适用于立式单片装置(固定成膜装置)。
153.载体10被构造为能够在配置为立式的状态下保持玻璃基板s。即,载体10以玻璃基板s的一面(主面)沿大致铅直方向的方式将玻璃基板s保持为大致竖直。如图3所示,载体10具备由铝等构成的矩形框状的载体框架10a和在与载体框架10a之间夹持并保持玻璃基板s的矩形框状的基板承受框架10b。
154.在载体框架10a和基板承受框架10b上,也可以沿着载体框架10a的矩形轮廓设置有多个用于保持基板的未图示的基板引导件和夹具。另外,在载体框架10a的上边和下边,可以具有能够沿其轮廓运送载体10的滑块和磁铁等姿势控制机构。
155.如图1、图2所示,立式运送机构110除了具有在真空腔室101~105的内部具备的各运送机构111~115之外,还具有配置在真空腔室101~105的外部的运送机构117。立式运送机构110在构成立式运送型的基板处理装置100的多个真空腔室101~105、进行大气压环境下的运送的运送机构117和大气运送输送机等之间循环运送载体10。
156.运送机构117配置在位于装载及卸载室101的密闭机构101v的外侧的立卧姿势变位部107上。
157.运送机构117具有载置以主面大致水平的方式水平运送来的玻璃基板s的支撑部117a。支撑部117a被支撑成可绕水平的旋转轴117b旋转。支撑部117a通过绕旋转轴117b旋转,能够在玻璃基板s的主面为水平的水平姿势与玻璃基板s的主面立起的立式运送姿势之间切换玻璃基板s的姿势。
158.在立卧姿势变位部107中,运送机构117将以主面大致水平的方式水平运送来的玻璃基板s载置在支撑部117a上。运送机构117为了将玻璃基板s的姿势设置成用于运入装载及卸载室101的运入姿势,可通过使支撑部117a绕水平的旋转轴117b旋转来使玻璃基板s立起。此时,支撑部117a也能够旋转载体10。
159.运送机构117能够在装载及卸载室101的内部与密闭机构101v1(101v)的外侧连续地运送,以使成为用于向装载及卸载室101运入的运入姿势而立起的玻璃基板s和载体10能够运入装载及卸载室101。
160.同样,运送机构117能够使成为作为从装载及卸载室101运出的姿势的运出姿势而立起的玻璃基板s与支撑部117a一起绕旋转轴117b旋转。运送机构117以能够水平运送的方式使玻璃基板s和载体10成为主面大致水平的姿势。
161.运送机构117能够将成为从装载及卸载室101的运出姿势而立起的玻璃基板s和载
体10从装载及卸载室101向外部运出。进而,运送机构117能够将玻璃基板s和载体10在装载及卸载室101的内部与密闭机构101v2(101v)的外侧连续地运送。
162.进而,运送机构117使得从装载及卸载室101向外部运出后成为水平运送姿势的玻璃基板s,以能够水平运送的方式离开支撑部117a,并转交给水平运送机构。
163.图4是表示本实施方式的基板处理装置的颗粒去除机构的俯视示意图。图5是表示本实施方式的基板处理装置的颗粒去除机构的侧面示意图。颗粒去除机构120能够通过吹气来去除附着在玻璃基板s和载体10表面上的颗粒。
164.如图1、图2、图4、图5所示,颗粒去除机构120被配置在装载及卸载室101与立卧姿势变位部107的边界位置。颗粒去除机构120与运送机构117相邻配置。
165.具体而言,在密闭机构101v1(101v)的外侧配置有颗粒去除机构120a,在密闭机构101v2(101v)的外侧配置有颗粒去除机构120b。颗粒去除机构120a和颗粒去除机构120b具有大致相同的结构。
166.颗粒去除机构120具有多个喷出喷嘴121和抽吸喷嘴122。
167.喷出喷嘴121向由立式运送机构110运送的载体10和玻璃基板s喷出空气。喷出喷嘴121与空气供给部123连接。喷出喷嘴121能够将从空气供给部123供给的空气向玻璃基板s的主面喷出。
168.喷出喷嘴121的喷出方向相对于玻璃基板s的主面具有规定的角度。例如,喷出喷嘴121的喷出方向相对于玻璃基板s的主面的法线具有规定的角度θ。喷出喷嘴121的喷出方向可以是大致水平方向。喷出喷嘴121的喷出方向可以是比大致水平方向向上倾斜的方向。喷出喷嘴121的喷出方向可以是比大致水平方向向下倾斜的方向。
169.喷出喷嘴121的喷出方向可设定为在朝向玻璃基板s的主面之后可通过抽吸喷嘴122抽吸喷出空气的范围。
170.喷出喷嘴121的喷出方向可以与朝向装载及卸载室101的方向相反。喷出喷嘴121的喷出方向可以是离开密闭机构101v的方向。
171.多个喷出喷嘴121被配置在与由立式运送机构110运送的载体10和玻璃基板s的运送方向正交的上下方向上。多个喷出喷嘴121的喷出方向都可以设定为平行。或者,多个喷出喷嘴121的喷出方向可设定为具有相互不平行的配置。多个喷出喷嘴121的空气喷出量可设定为在上下方向上均等。多个喷出喷嘴121的空气喷出量可设定为在上下方向上具有不均等的部分。
172.多个喷出喷嘴121在上下方向上的配置范围可以是能够对包括从由立式运送机构110运送的载体10和玻璃基板s的上端到下端的部分进行喷射的范围。多个喷出喷嘴121在上下方向上的配置范围可以比由立式运送机构110运送的载体10和玻璃基板s的上端向上方更突出。同样,多个喷出喷嘴121在上下方向上的配置范围可以是能够比载体10和玻璃基板s的下端向下方更突出而进行喷射的范围。以下,有时将多个喷出喷嘴121在上下方向上的配置范围称为喷出喷嘴配置范围。
173.在上下方向上,多个喷出喷嘴121可以均等地配置。在上下方向上,多个喷出喷嘴121可具有不均等的配置。例如,在接近由立式运送机构110运送的载体10和玻璃基板s的下端的喷出喷嘴配置范围中,与接近上端的喷出喷嘴配置范围相比,可以更多地设定喷出喷嘴121在上下方向单位长度上的配置数量。
174.抽吸喷嘴122能够抽吸向载体10和玻璃基板喷出的空气。抽吸喷嘴122与空气抽吸部124连接。
175.抽吸喷嘴122在上下方向上延伸。抽吸喷嘴122也可以被分割成在上下方向上具有多个部分。抽吸喷嘴122具有能够抽吸向载体10和玻璃基板喷出的空气的宽度方向的尺寸、沿玻璃基板s的移动方向的规定的尺寸。
176.抽吸喷嘴122相对于多个喷出喷嘴121配置在沿着由立式运送机构110运送的载体10和玻璃基板s的移动方向隔开的位置。抽吸喷嘴122在玻璃基板s的移动方向上配置在比喷出喷嘴121更远离装载及卸载室101的位置。
177.抽吸喷嘴122的抽吸量设定为能够抽吸从多个喷出喷嘴121喷出的全部空气。或者,抽吸喷嘴122的抽吸量设定为能够进行比从多个喷出喷嘴121喷出的空气量更多的抽吸。
178.抽吸喷嘴122在上下方向上的配置范围可以是能够对包括从由立式运送机构110运送的载体10和玻璃基板s的上端到下端的部分进行抽吸的范围。抽吸喷嘴122在上下方向上的配置范围可以比由立式运送机构110运送的载体10和玻璃基板s的上端向上方更突出。同样,抽吸喷嘴122在上下方向上的配置范围可以是能够比载体10和玻璃基板s的下端向下方更突出而进行抽吸的范围。以下,有时将多个抽吸喷嘴122在上下方向上的配置范围称为抽吸喷嘴配置范围。抽吸喷嘴配置范围可以是能够比载体10和玻璃基板s的下端向下方更突出并从运送机构117附近抽吸的范围。
179.在上下方向上,抽吸喷嘴122可配置成能够进行均等的抽吸。在上下方向上,抽吸喷嘴122可具有能够进行不均等的抽吸的配置。例如,在接近由立式运送机构110运送的载体10和玻璃基板s的下端的抽吸喷嘴配置范围中,与接近上端的抽吸喷嘴配置范围相比,能够更多地设定抽吸喷嘴122在单位长度上的抽吸量。在这种情况下,在接近玻璃基板s的下端的抽吸喷嘴配置范围中,与接近上端的抽吸喷嘴配置范围相比,能够增大抽吸喷嘴122的沿玻璃基板s的移动方向的尺寸。
180.此外,抽吸喷嘴122不仅可以配置在由立式运送机构110运送的载体10和玻璃基板s的运送位置附近的区域,如果需要,还可以配置在除此以外的场所。例如,可以配置为能够将通过喷出喷嘴121的吹气离开载体10和玻璃基板s的颗粒抽吸为不会进一步飞散。
181.空气供给部123和空气抽吸部124与控制部125连接。控制部125还与运送机构117、密闭机构101v的驱动部101vp、检测机构101a~105a连接。
182.控制部125可同步控制空气供给部123、空气抽吸部124、运送机构117、密闭机构101v的驱动部101vp、检测机构101a~105a。
183.以下,对本实施方式的基板处理装置100中的颗粒去除机构120的操作以及与其他结构的同步操作进行说明。
184.图6是表示本实施方式的基板处理方法的流程图。
185.如图6所示,本实施方式的基板处理装置100中的基板处理方法具有:载体准备工序s001、基板水平运送工序s002、基板装载工序s003、载体旋转立起工序s004、抽吸开始工序s005、吹气开始工序s006、门阀打开工序s007、载体运入开始工序s008、载体运入完成工序s009、门阀关闭工序s010、吹气停止工序s011和抽吸停止工序s012。
186.在本实施方式的基板处理方法中,首先,作为图6所示的载体准备工序s001,在运
送机构117中将载体10设置在支撑部117a。此时,支撑部117a和载体10围绕旋转轴107b位于主面大致水平的水平位置。
187.接着,作为图6所示的基板水平运送工序s002,从外部将结束规定的前处理的玻璃基板s运送到立卧姿势变位部107。此时,玻璃基板s通过在大气压环境下进行运送的大气运送输送机,以主面呈大致水平的方式被进行水平运送。
188.接着,作为图6所示的基板装载工序s003,将玻璃基板s装载到在载体准备工序s001中设置在水平位置的载体10上。此时,例如利用机械臂(省略图示)吸附保持玻璃基板s并载置在载体10上。由此,在载体框架10a与基板承受框架10b之间夹持并保持玻璃基板s,玻璃基板s成为装载状态。此时,还可以进行载体10与玻璃基板s的对准。
189.接着,作为图6所示的载体旋转立起工序s004,驱动运送机构117,使支撑部107a绕旋转轴107b旋转,使支撑部107a和保持玻璃基板s的载体10立起。此时,玻璃基板s的主面成为沿大致铅直方向的姿势。
190.接着,作为图6所示的抽吸开始工序s005,通过来自控制部125的信号使颗粒去除机构120的空气抽吸部124进行操作,开始在大气压环境下的抽吸喷嘴122的空气抽吸。此时,玻璃基板s和载体10不需要位于作为抽吸喷嘴122附近的抽吸范围,但玻璃基板s和载体10也可以位于抽吸喷嘴122附近。
191.接着,作为图6所示的吹气开始工序s006,通过来自控制部125的信号使颗粒去除机构120的空气供给部123进行操作,开始在大气压环境下的喷出喷嘴121的吹气。此时,玻璃基板s和载体10不需要位于作为喷出喷嘴121附近的喷出范围,但玻璃基板s和载体10也可以位于喷出喷嘴121附近。另外,喷出喷嘴121所吹出的空气从抽吸喷嘴122被抽吸。
192.接着,作为图6所示的门阀打开工序s007,首先,通过排气机构101b等,将装载及卸载室101的内部设为大气压,以使密闭机构101v1(101v)能够开闭。
193.接着,通过来自控制部125的信号驱动驱动部101vp,使运入侧的密闭机构101v1(101v)成为打开状态。此时,喷出喷嘴121所吹出的空气朝向与打开密闭机构101v1的装载及卸载室101的内部相反的方向喷出。在所吹出的空气喷出的同时,喷出喷嘴121所吹出的空气从抽吸喷嘴122被抽吸。因此,不会侵入装载及卸载室101的内部。
194.接着,作为图6所示的载体运入开始工序s008,通过来自控制部125的信号驱动立式运送机构110,使玻璃基板s和载体10向打开状态的密闭机构101v1开始运送。于是,玻璃基板s和载体10在颗粒去除机构120的接近位置朝向运送方向移动。此时,玻璃基板s和载体10沿着玻璃基板s的主面移动。在颗粒去除机构120中,通过喷出喷嘴121的吹气,在该所吹出空气的喷出范围内,附着在玻璃基板s和载体10上的颗粒被吹飞,从玻璃基板s和载体10去除。包含颗粒的空气从抽吸喷嘴122被抽吸。由此,颗粒不会飞散到玻璃基板s的周边。
195.根据玻璃基板s和载体10相对于颗粒去除机构120的运送位置,沿上下方向排列的喷出喷嘴121所吹出空气的喷出区域在水平方向上扫描玻璃基板s和载体10。因此,玻璃基板s和载体10经过与颗粒去除机构120接近的旁边位置,玻璃基板s和载体10穿出喷出喷嘴121所吹出空气的喷出区域。由此,在玻璃基板s和载体10的整体及整个面上完成颗粒去除。
196.接着,作为图6所示的载体运入完成工序s009,玻璃基板s和载体10的整体被运送至收纳于装载及卸载室101的内部的状态。如果检测机构101a检测到玻璃基板s和载体10在装载及卸载室101的内部到达了规定的位置,则检测机构101a将检测信号输出到控制部
125。
197.接着,作为图6所示的门阀关闭工序s010,输入了检测机构101a的信号的控制部125向驱动部101vp输出驱动信号。通过该信号驱动驱动部101vp,使运入侧的密闭机构101v1(101v)成为关闭状态。此时,喷出喷嘴121的吹气及抽吸喷嘴122的空气抽吸动作都在持续。
198.接着,作为图6所示的吹气停止工序s011,在确认密闭机构101v1(101v)完成闭塞后,通过来自控制部125的信号停止颗粒去除机构120的空气供给部123的操作。进而,停止在大气压环境下的喷出喷嘴121的吹气。
199.接着,作为图6所示的抽吸停止工序s012,在确认停止吹气后,通过来自控制部125的信号停止颗粒去除机构120的空气抽吸部124的操作,停止在大气压环境下的抽吸喷嘴122的空气抽吸。
200.由此,结束运入时的颗粒去除工序。
201.接着,在真空腔室内,在确认密闭机构101v1(101v)完成闭塞后,通过排气机构101b对装载及卸载室101内部抽真空。
202.接着,控制部125驱动运送机构111、112,将玻璃基板s和载体10从装载及卸载室101向预加热室102运送。此时,开闭密闭机构101d。
203.在预加热室102中,通过加热器等温度调节机构102c对玻璃基板s进行加热。当检测机构102a检测到玻璃基板s被加热到规定的温度时,控制部125驱动运送机构112、113,将玻璃基板s和载体10从预加热室102向第一成膜室103运送。此时,开闭密闭机构102d。
204.在第一成膜室103中进行规定的真空处理。例如,利用产生等离子体的溅射进行成膜处理。此时,通过排气机构103b对第一成膜室103进行排气,并且从气体导入机构103g供给规定的气氛气体。检测机构103a检测第一成膜室103的内部的压力和气体组成、基板温度、以及玻璃基板s和载体10的运送位置。
205.另外,从电源103p向背板(阴极电极)103ca施加溅射电压。另外,也可以通过磁控管磁路在靶103t上形成规定的磁场。
206.在第一成膜室103内由等离子体激发的溅射气体的离子与阴极电极103ca的靶103t冲撞并使成膜材料的颗粒飞出。然后,飞出的颗粒和反应气体结合后附着在玻璃基板s上,从而在玻璃基板s的表面成膜规定的层。
207.在第二成膜室104及第三成膜室105中进行的真空处理也与在第一成膜室103中的真空处理同样地进行。此外,在第一成膜室103、第二成膜室104和第三成膜室105之间运送玻璃基板s和载体10时,驱动运送机构113~115,并且开闭密闭机构103d、104d。
208.在第三成膜室105中,运送机构115被构造为横穿机构。运送机构115在使玻璃基板s与靶105t相对置的状态下,改变相互对置的玻璃基板s与靶105t的对置距离。运送机构115使玻璃基板s从运送去路横穿到运送回路。
209.此外,在第一成膜室103~第三成膜室105中,也可以在运送机构115的运送去路、运送回路及横穿运送路径的任意位置对玻璃基板s进行真空处理。
210.在基板处理装置100中的成膜等真空处理完成后,驱动立式运送机构110,将玻璃基板s和载体10运送至装载及卸载室101。
211.图7是表示本实施方式的基板处理方法的流程图。
212.如图7所示,本实施方式的基板处理装置100中的基板处理方法具有:抽吸开始工序s101、吹气开始工序s102、门阀打开工序s103、载体运出开始工序s104、载体运出完成工序s105、门阀关闭工序s106、吹气停止工序s107、抽吸停止工序s108、载体旋转倒置工序s109、基板卸载工序s110和基板水平运送工序s111。
213.在本实施方式的基板处理方法中,作为图7所示的抽吸开始工序s101,通过来自控制部125的信号使颗粒去除机构120的空气抽吸部124进行操作,开始在大气压环境下的抽吸喷嘴122的空气抽吸。此时,玻璃基板s和载体10可以位于装载及卸载室101的内部。
214.接着,作为图7所示的吹气开始工序s102,通过来自控制部125的信号使颗粒去除机构120的空气供给部123进行操作,开始在大气压环境下的喷出喷嘴121的吹气。此时,玻璃基板s和载体10可以在装载及卸载室101的内部。另外,喷出喷嘴121所吹出的空气从抽吸喷嘴122被抽吸。
215.接着,作为图7所示的门阀打开工序s103,首先,通过排气机构101b等,将装载及卸载室101的内部成为大气压,以使密闭机构101v2(101v)能够开闭。
216.接着,通过来自控制部125的信号驱动驱动部101vp,使得运出侧的密闭机构101v2(101v)成为打开状态。此时,喷出喷嘴121所吹出的空气朝向与打开密闭机构101v1的装载及卸载室101的内部相反的方向喷出。同时,喷出喷嘴121所吹出的空气从抽吸喷嘴122被抽吸。因此,不会侵入装载及卸载室101的内部。
217.接着,作为图7所示的载体运出开始工序s104,通过来自控制部125的信号驱动立式运送机构110,从装载及卸载室101的内部向打开状态的密闭机构101v1开始运送玻璃基板s和载体10。于是,玻璃基板s和载体10在密闭机构101v1的外侧并在颗粒去除机构120的接近位置朝向运送方向移动。此时,玻璃基板s和载体10沿着玻璃基板s的主面移动。在颗粒去除机构120中,通过喷出喷嘴121的吹气,在该所吹出空气的喷出范围内,附着在玻璃基板s和载体10上的颗粒被吹飞,从玻璃基板s和载体10去除。包含颗粒的空气从抽吸喷嘴122被抽吸。由此,颗粒不会飞散到玻璃基板s的周边。
218.根据玻璃基板s和载体10相对于颗粒去除机构120的运送位置,沿上下方向排列的喷出喷嘴121所吹出空气的喷出区域在水平方向上扫描玻璃基板s和载体10。因此,玻璃基板s和载体10经过与颗粒去除机构120接近的旁边位置,玻璃基板s和载体10穿出喷出喷嘴121所吹出空气的喷出区域。由此,在玻璃基板s和载体10的整体及整个面上完成颗粒去除。
219.由此,能够从玻璃基板s和载体10去除在成膜工序等中附着的颗粒。
220.接着,作为图7所示的载体运出完成工序s105,驱动立式运送机构110,将玻璃基板s和载体10的整体运送至从装载及卸载室101收纳于外部的立卧姿势变位部107的状态。关于运送机构117,当玻璃基板s和载体10到达立卧姿势变位部107中的规定的位置时,运送机构117将完成运送的信号输出到控制部125。
221.接着,作为图7所示的门阀关闭工序s106,输入了运送机构117的信号的控制部125向驱动部101vp输出驱动信号。通过该信号驱动驱动部101vp,使运出侧的密闭机构101v2(101v)成为关闭状态。此时,喷出喷嘴121的吹气及抽吸喷嘴122的空气抽吸动作都在持续。
222.接着,作为图7所示的吹气停止工序s107,在确认密闭机构101v2(101v)完成闭塞后,通过来自控制部125的信号停止颗粒去除机构120的空气供给部123的操作。进而,停止在大气压环境下的喷出喷嘴121的吹气。
223.接着,作为图7所示的抽吸停止工序s108,在确认停止吹气后,通过来自控制部125的信号停止颗粒去除机构120的空气抽吸部124的操作,停止在大气压环境下的抽吸喷嘴122的空气抽吸。
224.接着,作为图7所示的载体旋转倒置工序s109,驱动运送机构117,使支撑部107a绕旋转轴107b旋转,使支撑部107a和保持玻璃基板s的载体10倒置到水平位置。此时,玻璃基板s的主面呈沿大致水平方向的姿势。
225.接着,作为图7所示的基板卸载工序s110,从在载体旋转倒置工序s109中设置在水平位置的载体10卸载玻璃基板s。此时,在使载体框架10a和基板承受框架10b分离后,例如通过机械臂(省略图示)吸附保持玻璃基板s而从载体10分离,从而成为卸载状态。
226.接着,作为图7所示的基板水平运送工序s111,将结束成膜等真空处理的玻璃基板s从立卧姿势变位部107向外部运送。此时,玻璃基板s通过在大气压环境下进行运送的大气运送输送机,以主面呈大致水平的方式被水平运送。
227.通过上述操作,结束基板处理装置100中的真空处理。
228.在本实施方式的基板处理装置100中,通过颗粒去除机构120,能够从玻璃基板s和载体10的表面去除颗粒。这里,仅通过原本设置在基板处理装置100上的立式运送机构110运送玻璃基板s和载体10,就能够使颗粒去除机构120的吹气扫描到玻璃基板s和载体10的整体。
229.由此,在成膜等真空处理前,能够在去除附着在玻璃基板s和载体10上的颗粒的状态下,运入真空腔室101~105。或者,在成膜等真空处理中,在去除附着在玻璃基板s和载体10上的颗粒的状态下,能够从真空腔室101运出玻璃基板s和载体10。因此,能够降低后续工序中的颗粒的影响,防止使用真空处理的玻璃基板s的制造特性的下降,提高制造效率。
230.以下,基于附图说明本发明的第二实施方式所涉及的基板处理装置、基板处理方法。
231.图8是表示本实施方式的基板处理装置中的颗粒去除机构的俯视示意图。本实施方式在关于第二喷出喷嘴这点上与上述第一实施方式不同。在本实施方式中,对第二喷出喷嘴以外的与上述第一实施方式对应的结构标注相同的附图标记并省略其说明。此外,在图8中,省略了基板处理装置的一部分结构。
232.如图8所示,本实施方式中的颗粒去除机构120具有第二喷出喷嘴121a。第二喷出喷嘴121a与第二空气供给部123a连接。此外,也可以使第二空气供给部123a与空气供给部123共用,第二喷出喷嘴121a与空气供给部123连接。
233.第二喷出喷嘴121a相对于抽吸喷嘴122设置在相对于作为水平方向的运送方向与喷出喷嘴121相反的一侧。多个第二喷出喷嘴121a与喷出喷嘴121同样地在上下方向上配置。第二喷出喷嘴121a的喷出方向为朝向抽吸喷嘴122并且朝向玻璃基板s的主面的方向。
234.第二喷出喷嘴121a的喷出方向与喷出喷嘴121的喷出方向同样,相对于玻璃基板s的主面具有规定的角度。例如,第二喷出喷嘴121a的喷出方向相对于玻璃基板s的主面的法线具有规定的角度θ。第二喷出喷嘴121a的喷出方向可以是大致水平方向。第二喷出喷嘴121a的喷出方向可以是比大致水平方向向上方更倾斜的方向。第二喷出喷嘴121a的喷出方向可以是比大致水平方向向下方更倾斜的方向。
235.多个第二喷出喷嘴121a的喷出方向与喷出喷嘴121的喷出方向同样,都可以设定
为平行。或者,多个第二喷出喷嘴121a的喷出方向可以设定为具有相互不平行的配置。多个第二喷出喷嘴121a的空气喷出量可以设定为在上下方向上均等。多个第二喷出喷嘴121a的空气喷出量可以设定为在上下方向上具有不均等的部分。
236.多个第二喷出喷嘴121a在上下方向上的配置范围与喷出喷嘴121的配置范围同样,可以是能够对包括从由立式运送机构110运送的载体10和玻璃基板s的上端到下端的部分进行喷射的范围。多个第二喷出喷嘴121a在上下方向上的配置范围可以比由立式运送机构110运送的载体10和玻璃基板s的上端向上方更突出。同样,多个第二喷出喷嘴121a在上下方向上的配置范围可以是能够比载体10和玻璃基板s的下端向下方更突出而进行喷射的范围。以下,有时将多个第二喷出喷嘴121a在上下方向上的配置范围称为喷出喷嘴配置范围。
237.在上下方向上,多个第二喷出喷嘴121a与喷出喷嘴121同样地可以均等地配置。在上下方向上,第二喷出喷嘴121a可以具有不均等的配置。例如,在接近由立式运送机构110运送的载体10和玻璃基板s的下端的喷出喷嘴配置范围中,与接近上端的喷出喷嘴配置范围相比,可以更多地设定第二喷出喷嘴121a在上下方向单位长度上的配置数量。
238.本实施方式中的颗粒去除机构120可以将从第二喷出喷嘴121a喷出的吹气作为空气幕。由此,即使在从喷出喷嘴121喷出的空气在运送方向上越过抽吸喷嘴122的情况下,也能够在运送方向上比抽吸喷嘴122更靠喷出喷嘴121相反侧的位置进行阻断。由此,能够可靠地使从喷出喷嘴121喷出的空气被抽吸喷嘴122抽吸。
239.以下,基于附图说明本发明的第三实施方式所涉及的基板处理装置、基板处理方法。
240.图9是表示本实施方式的基板处理装置中的颗粒去除机构的俯视示意图。本实施方式在关于除电机构这点上与上述的第一及第二实施方式不同。在本实施方式中,对除电机构以外的与上述第一及第二实施方式对应的结构标注相同的附图标记并省略其说明。此外,在图9中,省略了基板处理装置的一部分结构。
241.如图9所示,本实施方式的颗粒去除机构120具备除电机构130。
242.除电机构130还可以包括通过中和颗粒的电荷来提高颗粒去除效果。除电机构130可以进行利用离子发生器的除电、使用来自利用离子发生器的喷出喷嘴121的空气的除电、利用微波照射的除电等。由此,除电机构130可以设置为中和颗粒电荷的结构、或者中和载体10和玻璃基板s的至少一方的电荷的结构。
243.本实施方式中的颗粒去除机构120能够通过除电机构130提高附着在玻璃基板s和载体10上的颗粒的去除效果。
244.另外,除了除电机构130以外,或者,代替除电机构130,可对玻璃基板s和载体10照射超声波来提高颗粒的去除效果。
245.进而,在本发明的实施方式中,在上述各实施方式中,还可以任意选择各个结构并分别组合实施。
246.附图标记说明
247.10
……
载体
248.100
……
基板处理装置
249.101
……
装载及卸载室(真空腔室)
250.101v、101v1、101v2
……
密闭机构
251.102
……
预加热室(真空腔室)
252.103
……
第一成膜室(真空腔室)
253.104
……
第二成膜室(真空腔室)
254.105
……
第三成膜室(真空腔室)
255.107
……
立卧姿势变位部
256.110
……
立式运送机构
257.111~115、117
……
运送机构
258.120
……
颗粒去除机构
259.121
……
喷出喷嘴
260.121a
……
第二喷出喷嘴
261.122
……
抽吸喷嘴
262.123
……
空气供给部
263.123a
……
第二空气供给部
264.124
……
空气抽吸部
265.125
……
控制部
266.130
……
除电机构。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。