1.本发明涉及一种混合液压机,更具体地,本发明涉及这样一种混合液压机,该混合液压机被构造成在动臂下降操作中从动臂致动器排出的流体中回收能量并有效地减少在动臂下降运动中发生的跳动或冲击。
背景技术:
2.液压机是被构造成通过向作业装置(的致动器)供应高压流体来执行作业的设备。为了提高液压机的燃料效率,已经提出了一种回收包含在从作业装置的致动器排出的流体中的能量的技术。这种技术可以通过回收能量来减少燃料的消耗。
技术实现要素:
3.本公开的各个方面提供了一种混合液压机,所述混合液压机被构造成在动臂下降操作中从所述从动臂致动器排出的流体中回收能量,从而减少燃料消耗,并有效地减少在动臂下降运动中发生的跳动或冲击。
4.根据一方面,一种液压机可以包括:动臂致动器,该动臂致动器包括大腔室和小腔室;回收单元,该回收单元被构造成接收从大腔室排出的流体,然后回收能量;回收管线,该回收管线连接所述大腔室和回收单元;蓄能器,该蓄能器连接到所述回收管线上的第一点;排出阀,该排出阀设置在所述回收管线上且位于所述第一点与回收单元之间;第一传感器,该第一传感器被构造成测量所述蓄能器中的压力;以及控制器,该控制器被构造成控制所述排出阀的打开和关闭。所述控制器可以执行以下防跳动控制:根据预定对应关系,确定所述蓄能器中的目标压力,该目标压力对应于由载荷施加到所述大腔室中的流体的载荷压力;以及控制所述排出阀的打开和关闭,使得由所述第一传感器测量的蓄能器中的压力达到目标压力。
5.在一些实施例中,所述液压机还可以包括:第二传感器,该第二传感器被构造成测量所述大腔室中的压力;以及第三传感器,该第三传感器被构造成测量所述小腔室中的压力。所述载荷压力可以是pa-pb/(aa/ab),其中,pa是由所述第二传感器测量的大腔室中的压力,pb是由所述第三传感器测量的小腔室中的压力,aa是所述大腔室的面积,并且ab是所述小腔室的面积。
6.在一些实施例中,所述预定对应关系可以被设定成使得目标压力随着载荷压力的增加而增加。
7.根据本公开的实施例,混合液压机可以通过回收能量来减少燃料消耗,并且有效地减少在动臂下降运动中发生的跳动或冲击。
8.本公开的方法和设备具有其它特征和优点,这些特征和优点将从附图和以下具体实施方式中变得显而易见或在附图和以下具体实施方式中更详细地阐述,附图的公开内容结合于此,以下具体实施方式与附图一起用于解释本公开的某些原理。
附图说明
9.图1是示出根据一些实施例所述的液压机的外观的示意图;
10.图2示出了根据一些实施例所述的液压机的液压回路;
11.图3示出了根据一些实施例所述的液压机的液压回路;
12.图4是示出根据一些实施例所述的防跳动控制方法的流程图;
13.图5是示出在执行防跳动控制之前设定的载荷压力与目标压力之间的对应关系的示例的曲线图;以及
14.图6是示出根据一些实施例所述的在执行防跳动控制的同时蓄能器中的压力与作业装置的速度之间的关系的示例的曲线图。
具体实施方式
15.在下文中,将参考附图详细描述本公开的实施例。
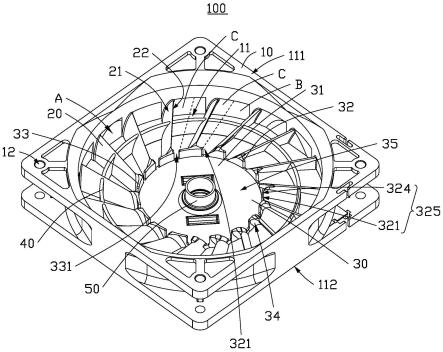
16.图1是示出根据一些实施例所述的液压机的外观的示意图。
17.液压机可以通过使用液压来致动作业装置300,从而执行作业。在一些实施例中,所述液压机可以是施工机械。
18.在一些实施例中,所述液压机可以是如图1所示的挖掘机。所述液压机可以包括上部结构100、下部结构200和作业装置300。
19.所述下部结构200包括允许所述液压机行进的行进致动器。所述行进致动器可以是液压马达。
20.所述上部结构100可以包括作业流体箱、泵、电源、控制阀等。此外,所述上部结构100可以包括允许所述上部结构100相对于所述下部结构200旋转的摆动致动器。所述摆动致动器可以是液压马达。
21.所述作业装置300允许所述挖掘机执行作业。所述作业装置300可以包括:动臂111;臂121;铲斗131;以及分别致动所述动臂111、臂121和铲斗131的动臂致动器313、臂致动器323和铲斗致动器333。所述动臂致动器313、臂致动器323和铲斗致动器333可以分别是液压缸。
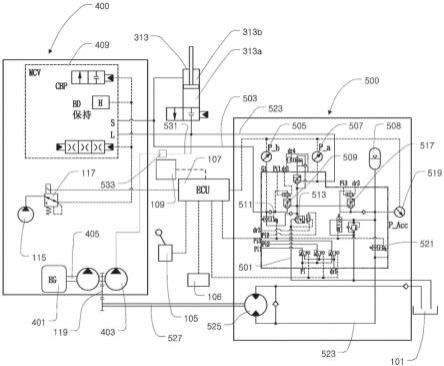
22.图2示出了根据一些实施例所述的液压机的液压回路。
23.在一些实施例中,所述液压机可以包括动臂致动器313、能量回收回路500、箱101和控制器107。所述能量回收回路500可以设置在所述动臂致动器313与箱101之间。所述能量回收回路500可以连接到动臂致动器313,以回收从所述动臂致动器313排出的流体中的能量。在一些实施例中,所述能量回收回路500可以包括回流阀513、再生阀509、充液阀517以及回收单元525。
24.在一些实施例中,所述液压机可以包括能量消耗回路400。所述能量消耗回路400可以设置在所述箱101与动臂致动器313之间。所述能量消耗回路400是连接到所述动臂致动器313的回路,以向所述动臂致动器313供应高压流体,或将从所述动臂致动器313排出的流体回流到所述箱101。在一些实施例中,所述能量消耗回路400可以包括电源401、主泵403和控制阀409。所述主泵403可以将加压流体引导到所述动臂致动器313。所述电源401可以驱动所述主泵403。在一些实施例中,所述电源401可以包括发动机。
25.在一些实施例中,所述液压机可以被构造成在正常时间使用所述能量消耗回路
400来致动所述作业装置,而当预期执行混合功能时,所述液压机可以使用所述能量回收回路500来回收能量。
26.在一些实施例中,所述电源401可以通过经由主轴405向所述主泵403供应动力来驱动所述主泵403。所述主泵403可以对流体进行加压并将加压后的流体引导到所述动臂致动器313。所述动臂致动器313可以接收来自所述主泵403的加压流体,并将流体朝向所述箱101回流。所述动臂致动器313可以通过将从所述主泵403接收的加压流体的力提供到所述动臂来致动所述动臂。
27.在一些实施例中,所述动臂致动器313可以是液压缸,并且可以包括大腔室313a和小腔室313b。因为连接到所述动臂的活塞杆延伸穿过所述小腔室313b,所以由于所述活塞杆所占据的面积,所述小腔室313b内部的流体与活塞接触的面积ab小于所述大腔室313a内部的流体与活塞接触的面积aa。参考图1,在使所述动臂下降的动臂下降操作中,所述活塞杆也下降。因此,流体进入所述小腔室313b,同时从所述大腔室313a排出流体。
28.所述控制阀409可以通过流体连接所述主泵403、箱101和动臂致动器313来控制所述主泵403、箱101与动臂致动器313之间的流体流动方向。在一些实施例中,所述控制阀409可以处于中性位置、第一非中性位置或第二非中性位置。当所述控制阀409处于所述中性位置时,所述控制阀409可以操作成不与所述动臂致动器313流体连通,并将已经从所述主泵403流出的流体通过中央旁通路径回流到所述箱101。当所述控制阀409处于第一非中性位置时,所述控制阀409可以防止已经从所述主泵403流出的流体通过所述中央旁通路径回流到所述箱101,并且将已经从所述主泵403流出的流体引导到所述小腔室313b,并且将已经从所述大腔室313a流出的流体引导到所述箱101,从而使得所述动臂向下移动。当所述控制阀409处于第二非中性位置时,所述控制阀409可以防止已经从所述主泵403流出的流体通过所述中央旁通路径回流到所述箱101,并且将已经从所述主泵403流出的流体引导到所述大腔室313a,并且将已经从所述小腔室313b流出的流体引导到所述箱101,从而使得所述动臂向上移动。
29.在一些实施例中,所述液压机可以包括第一操作员输入装置105,以移动所述控制阀409。操作员可以通过操作所述第一操作员输入装置105来输入他/她的期望来升高或下降所述动臂。在一些在实施例中,所述第一操作员输入装置105可以是杆,但本公开不限于此。
30.在一些实施例中,所述第一操作员输入装置105可以是电输入装置,并且可以生成指示操作员的期望的电信号,并将该电信号传输到所述控制器107。在一些实施例中,所述液压机可以包括先导泵115和电子比例减压阀117。当从所述第一操作员输入装置105接收到电信号时,所述控制器107可以通过将控制信号传输到所述电子比例减压阀117来响应性地操作所述电子比例减压阀117。当所述电子比例减压阀117处于第一位置时,所述电子比例减压阀117可以通过将已经从所述先导泵115流出的先导流体引导到所述控制阀409来操作所述控制阀409。当所述电子比例减压阀117处于第二位置时,所述电子比例减压阀可以阻止先导流体从所述先导泵115流动到所述控制阀409,并且允许已经提供给所述控制阀409的先导流体排出。
31.所述回流阀513可以设置在所述大腔室313a与箱101之间,以允许或阻止流体从所述大腔室313a流动到所述箱101。所述再生阀509可以连接所述大腔室313a和小腔室313b,
以允许或阻止流体从所述大腔室313a流动到小腔室313b。所述充液阀517可以设置在所述大腔室313a与回收单元525之间,以允许或阻止流体从所述大腔室313a流动到所述回收单元525。
32.所述回收单元525是动力回收部件。在一些实施例中,所述回收单元525可以是液压马达(例如,协助马达)。所述协助马达可以通过为电源401提供回收的动力来协助所述电源401。在这方面,在一些实施例中,所述液压机可以包括动力传动装置。所述动力传动装置可以连接到所述电源401和协助马达,以在其间传输动力。在一些实施例中,所述动力传动装置可以包括连接所述电源401和主泵403的主轴405、连接到所述协助马达的协助轴527以及动力传输装置部分119。在一些实施例中,所述动力传输装置部分119可以包括如图2所示的齿轮系。然而,本公开不限于此,并且各种其它实施例也是可能的。
33.在一些实施例中,所述液压机可以包括第二操作员输入装置106,该第二操作员输入装置被构造成接收操作员的期望输入,以选择或取消选择混合模式。当选择所述混合模式的期望被输入到所述第二操作员输入装置106,并且动臂下降期望被输入到所述第一操作员输入装置105时,所述控制器107可以控制所述电子比例减压阀117,使得先导流体不被供应到所述控制阀409,从而将所述控制阀409移动到中性位置。以这种方式,所述控制器107可以阻止所述动臂致动器313与能量消耗回路400之间的流体流动。因此,在选择了混合模式的情况下,动臂下降操作可以仅由其重量引起,而无需由所述主泵403供应加压流体。当取消选择混合模式的期望被输入到所述第二操作员输入装置106或没有动臂下降的期望被输入到所述第一操作员输入装置105时,即使在取消选择混合模式的期望被输入到所述第二操作员输入装置106的情况下,所述控制器107也可以移动所述回流阀513、再生阀509和充液阀517,以阻止所述动臂致动器313与能量回收回路500之间的流体流动。
34.在一些实施例中,在使所述动臂下降的动臂下降操作中,所述回流阀513可以操作成阻止流体从所述大腔室313a流动到箱101。在动臂下降操作中,所述再生阀509可以操作成允许流体从所述大腔室313a流到小腔室313b。在动臂下降操作中,所述充液阀517可以操作成允许流体从所述大腔室313a流动到回收单元525。
35.在一些实施例中,所述能量回收回路500可以包括连接所述大腔室313a和回收单元525的回收管线523。在一些实施例中,所述充液阀517可以设置在所述回收管线523上。在一些实施例中,所述能量回收回路500可以包括设置在所述回收管线523上的排出阀521。在一些实施例中,所述能量回收回路500可以包括蓄能器508,该蓄能器在所述充液阀517与排出阀521之间的第一位置连接到所述回收管线523。所述充液阀517可以允许或阻止流体通过所述回收管线523从所述大腔室313a流动到蓄能器508。所述排出阀521设置在所述回收管线523上的位于所述第一位置与所述回收单元525之间的位置处,并且可以允许或阻止流体从所述蓄能器508流动到所述回收单元525。在动臂下降操作中,所述排出阀521可以操作成允许流体流动到所述回收单元525。
36.在一些实施例中,在动臂下降操作中,所述控制器107可以控制所述再生阀509和充液阀517,使得从所述大腔室313a排出的大约一半高压流量流过所述再生阀509以被再生,并且剩余量的流量流过所述充液阀517,以被存储在所述蓄能器508中。存储的流量通过所述排出阀521被供应到所述回收单元525。在此,根据所述再生阀509、充液阀517和排出阀521被控制为打开多少面积来确定损失多少动臂下降能量。在一些实施例中,在动臂下降操
作中(即,当接收到由操作员使用所述第一操作员输入装置105输入的动臂下降操作期望时),所述控制器107可以最大程度地打开所述再生阀509和充液阀517并且关闭所述回流阀513,以最小化压力损失。
37.在一些实施例中,所述液压机可以包括测量所述蓄能器508中的压力的第一传感器519。此外,所述液压机可以包括测量所述大腔室313a中的压力的第二传感器507和测量所述小腔室313b中的压力的第三传感器505。
38.在一些实施例中,所述液压机可以包括第三操作员输入装置109,操作员通过该第三操作员输入装置输入选择或取消选择防跳动模式的期望。所述控制器107可以仅在选择所述防跳动模式的期望被输入到所述第三操作员输入装置109时才执行防跳动控制。
39.在一些实施例中,所述液压机可以包括辅助管线531,该辅助管线将所述主泵403连接到所述回收管线523的第二点,所述回收管线的第二点位于所述回收管线523的第一点的上游。即使在选择了混合模式的情况下,当所述蓄能器508中充入的流体压力不足时(例如,当在选择了混合模式之后直接执行动臂下降操作时),可能无法有效减少跳动。因此,所述主泵403可以被构造成向所述蓄能器508供应加压流体,以协助将所述蓄能器508中的压力快速增加到目标压力。
40.所述辅助阀533可以设置在所述辅助管线531上,以打开或关闭所述辅助管线531。在一些实施例中,所述控制器107可以在执行防跳动控制时打开所述辅助阀533。例如,当选择混合模式的期望被输入到所述第二操作员输入装置106、动臂下降操作期望被输入到所述第一操作员输入装置105,并且选择防跳动模式的期望被输入到所述第三操作员输入装置109时,所述控制器107可以打开所述辅助阀533。
41.在上述实施例中,需要分别将期望输入到所述第二操作员输入装置106和第三操作员输入装置109,以便激活防跳动功能,但本公开不限于此。例如,在一些替代实施例中,当操作员将选择防跳动模式的期望输入到所述第三操作员输入装置109时,所述控制器107可以控制对应阀被打开或关闭,使得同时执行混合功能和防跳动功能。
42.图3示出了根据一些实施例所述的液压机的液压回路。
43.在一些替代实施例中,所述第一操作员输入装置105可以是包括内置减压阀(未示出)的液压输入装置,并且所述液压机可以包括辅助阀117a。在这些实施例中,所述先导泵115可以连接到所述第一操作员输入装置105的减压阀,并且所述减压阀可以将以下液压信号传输到所述辅助阀117a:该液压信号对应于通过所述第一操作员输入装置105输入的操作员期望。在一些实施例中,所述液压机可以包括传感器,该传感器测量由所述减压阀传输到所述辅助阀117a的液压信号的压力。所述传感器可以生成对应于液压信号的电信号,并将该电信号提供给所述控制器107。因此,尽管所述控制器107未直接连接到所述第一操作员输入装置105,但所述控制器107可以确定操作员已经输入了什么期望,即,输入了动臂下降操作期望或输入了动臂上升操作期望。当通过所述第二操作员输入装置106输入了取消选择混合模式的期望时,由所述第一操作员输入装置105生成的液压信号可以通过所述辅助阀117a传输到所述控制阀409。然而,当选择混合模式的期望被输入到所述第二操作员输入装置106时,即使在动臂下降期望被输入到所述第一操作员输入装置105的情况下,所述控制器107也可以控制所述辅助阀117a,使得先导流体不被供应到所述控制阀409,从而将所述控制阀409移动到中性位置。以这种方式,所述控制器107可以阻止所述动臂致动器313
与能量消耗回路400之间的流体流动。
44.图4是示出根据一些实施例所述的防跳动控制方法的流程图,并且图5是示出在执行防跳动之前设定的载荷压力与目标压力之间的对应关系的示例的曲线图。
45.图2和图3所示的液压机可以通过使用蓄能器508来回收能量,从而减少燃料消耗。此外,根据本公开所述,可以通过调节所述蓄能器508中的压力来减少在动臂操作中发生的跳动。
46.通常,动臂下降运动可能会造成作业装置的大量跳动。因此,快速的动臂下降操作可能会损害液压机的安全性,并给操作员带来不愉快的操作状态。因此,本公开提出了一种通过调节所述蓄能器508中的压力来减少这种跳动的方法。
47.i)在这方面,如图所示,首先,所述控制器107可以确定操作员是否输入了选择防跳动模式的期望。
48.ii)此后,所述控制器107可以计算施加到所述动臂致动器313的大腔室313a中的流体的载荷压力p
l
。在一些实施例中,所述控制器107可以使用由所述第二传感器507测量的大腔室313a中的压力pa和由所述第三传感器505测量的小腔室313b中的压力pb来计算所述载荷压力,如下所述:
49.p
l
=pa-pb/(aa/ab),
50.其中,aa是所述大腔室313a内的流体与活塞接触的面积,ab是所述小腔室313b内的流体与活塞接触的面积。
51.iii)随后,所述控制器107可以根据施加到所述动臂致动器313的载荷压力与所述蓄能器508中的目标压力p
t
之间的预设对应关系来获得与所计算的载荷压力相对应的目标压力。
52.所述载荷压力p
l
与目标压力p
t
之间的对应关系可以以多种形式提供。例如,可以以查找表或以以下函数关系的形式提供所述对应关系:
53.p
t
=f(p
l
)
54.在一些实施例中,所述载荷压力p
l
和目标压力p
t
可以具有以下函数关系:
55.p
t
=a
×
p
l
b(其中,a和b分别为常数,并且a》0)
56.在一些实施例中,可以提供第四操作员输入装置(未示出),以允许操作员选择a和b中的至少一个。当a选择较大的值时,目标压力对于相同的载荷压力具有较大的值,因此选择防跳动作用强的模式。
57.尽管图5示出了载荷压力和目标压力具有线性关系且b为0的实施例,但这仅是示例,本公开不限于此。为了有效地减少由大载荷压力引起的跳动,需要所述蓄能器508中的大流体压力。因此,当由于所述动臂下降操作中的载荷而使得施加到所述动臂致动器313的大腔室313a的载荷压力增加时,也可以线性或非线性增加所述蓄能器508中的抵抗动臂下降操作以有效减少跳动的目标压力。
58.iv)之后,所述控制器107可以控制排出阀521来被打开或关闭,使得所述蓄能器508中的压力达到目标压力。例如,可以执行反馈控制,使得当在由所述第一传感器519测量的蓄能器508中的压力pc小于目标压力时,关闭所述排出阀521;并且当在所述蓄能器508中的压力pc大于目标压力时,打开所述排出阀521。
59.图6是示出根据一些实施例所述的、在执行防跳动控制的同时蓄能器中的压力与
作业装置的速度之间关系的示例的曲线图。
60.如图6所述,在动臂下降操作中,可以通过控制所述排出阀521的打开和关闭来控制所述蓄能器508中的压力pc,并由此控制动臂下降速度v。由于所述蓄能器508中的压力pc用作对动臂下降运动的阻力,所以当所述蓄能器508中的压力pc增加时,动臂下降速度v降低。
61.本公开的具体示例性实施例的前述描述已经相对于附图进行了呈现,并且不旨在是穷举的或将本公开限于本文公开的精确形式,并且鉴于以上教导,对于本领域普通技术人员来说,显然可以实现许多修改和变化。
62.因此,本公开的范围旨在不限于前述实施例,而是由所附权利要求及其等效形式限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。