1.本实用新型总体涉及一种在诸如平地机之类的重型机械上使用的液压缸,并且更具体地,涉及一种具有满足机械的运动、结构和负载要求的特定性能尺寸的液压缸。
背景技术:
2.诸如平地机之类的重型机械上的常规液压系统可以包括泵,所述泵从罐中抽出低压流体,对流体加压,并使加压流体可用于多个不同的致动器,以用于使致动器移动。致动器可以包括专门设计为满足各种运动、结构和负载要求的液压缸,以便在使用机器执行其分配任务时使机器的各种结构元件相对于彼此移动。例如,可以将一个或多个液压缸专门设计为处理在操作特定机器以执行作业任务(比如对路基表面进行平整,或对建筑物施工的作业场地进行平整)时所需的液压流体压力、运动特性、扭转应力、压缩应力、拉伸应力、环向应力、运动范围和运动速度。在各种示例性布置中,可以通过选择性地节流(即,限制)从泵进入到每个致动器中的加压流体的流量来独立地控制每个致动器的速度。例如,为了使特定致动器高速移动,从泵进入到致动器中的流体的流量仅受到少量限制(或根本不受限制)。相比之下,为了使同一致动器或另一致动器低速移动,增加对流体流量的限制。尽管适合许多应用,但使用流体限制来控制执行器速度可能导致压力损失,这降低了液压系统的整体效率。
3.液压系统的一种替代类型被称为闭环液压系统。闭环液压系统通常包括以闭环方式连接到单个致动器或连接到串联运行的一对致动器的泵。在运行期间,泵从(多个)致动器的一个腔中抽出流体,并将加压流体排出到同一个(或多个)致动器的相对腔中。为了使(多个)致动器高速移动,泵以较快的速度排出流体。为了使(多个)致动器低速移动,泵以较慢的速度排出流体。闭环液压系统通常比常规液压系统更有效,因为(多个)致动器的速度是通过泵运行而不是流体限制来控制的。即,对泵进行控制以仅排出与使(多个)致动器以期望速度移动所需的一样多的流体,而不需要对流体流量进行节流。
4.平地机主要用作修整工具,以将施工场地或路基的表面造型成最终的形状和轮廓。通常,平地机包括许多手动操作的控制器,用于操纵平地机的车轮、定位铲刀、以及铰接平地机的前框架。铲刀可调节地安装至前框架,以将相对少量的土从一侧移到另一侧。另外,通过使平地机的前框架相对于平地机的后框架旋转来调节前框架的铰接。为了产生最终的表面轮廓,可以将铲刀和框架调整到许多不同的位置。定位平地机的铲刀可能是一项复杂且耗时的任务。具体地,例如,诸如控制表面标高、角度和切削深度之类的操作可能需要操作员的很大一部分注意力。对操作员的这种要求可能导致忽略操作平地机所需的其他任务。
5.一种简化操作员控制的方式是允许操作员调出存储在与控制设备相关联的存储器中的输入。在2010年6月1日授予morris等人的美国专利no. 7,729,835(’835专利)中公开了这种存储器控制的一个示例。具体地,’835专利公开了一种具有作业机具和液压致动器的挖掘机,液压致动器允许作业机具升高、降低、以及移动得更靠近或更远离挖掘机的主
体。该挖掘机配备有具有指轮控制的第一操纵杆以及具有功能选择开关和存储器控制的第二操纵杆。功能选择开关允许操作员从多种操作功能中进行选择。指轮允许操作员控制所选的操作功能。存储器控制允许操作员的输入被存储并在以后调出。输入被存储,直到存储器控制被禁用或者由存储器控制存储新的输入。
技术实现要素:
6.本实用新型提供了一种致动器、平地机和液压缸,与’835专利中公开的液压致动器相比,本实用新型的液压缸被设计成具有通过广泛分析确定的特定性能尺寸范围,所述广泛分析包括基于物理的方程式的应用、有限元分析和其他计算分析,考虑到使用过程中会在缸上施加的运动和结构应力,并结合经验数据和其他的旨在满足特定的工作要求以客户为中心的数据,并解决了现有技术中的上述和/或其他问题中的一个或多个技术问题。
7.在一个方面,本实用新型涉及一种致动器,该致动器被配置为相对于平地机的第二结构元件致动平地机的第一结构元件。该致动器可以包括管,其中该管包括限定在管中的中心轴向延伸孔,该孔在管的封闭远端与管的开放近端之间延伸,并且管的厚度由管的外径与管的孔直径之间的径向距离限定。杆可以滑动地安装在管内,其中杆在管的近端处由头部密封组件可滑动地支撑。活塞可以安装在杆的远端处,并且活塞保持组件可以附接到杆的远端并且被配置为将活塞保持在杆的远端上。耳轴帽孔可以穿过管的封闭远端来限定,并被配置为用于接收耳轴销,该耳轴销适于将管的远端枢转地连接至平地机的第一结构元件。杆眼孔可以穿过杆的近端来限定,并被配置为用于接收杆眼销,该杆眼销适于将杆的近端枢转地连接至平地机的第二结构元件。当杆和活塞完全缩回到管中,杆的远端位于管的封闭的远端附近时,从帽孔的中心到杆眼孔的中心的缩回的销至销尺寸等于479.5 mm
±
2.0 mm;从管的封闭的远端附近的活塞的第一完全缩回位置到在管的近端处与头部密封组件接触的活塞的第二完全伸出位置的冲程尺寸等于257.0 mm
±
1.5 mm;杆的直径等于45.0 mm
±
0.5 mm;并且管孔的直径等于63.0 mm
±
0.5 mm。
8.帽孔的直径等于41.28 mm
±
0.25 mm。
9.第一结构元件包括平地机的犁板铲刀。
10.第二结构元件包括平地机的前框架。
11.第一结构元件包括平地机的推土铲刀。
12.第一结构元件包括平地机上的裂土器。
13.第二结构元件包括平地机的后框架。
14.第一结构元件相对于第二结构元件的致动导致以下变化中的至少一个:平地机的犁板铲刀或推土铲刀相对于平地机在其上操作的地面的位置变化,犁板铲刀或推土铲刀相对于平地机的前框架的位置变化,平地机的裂土器相对于平地机在其上操作的地面的位置变化,或者裂土器相对于平地机的后框架的位置变化。
15.在另一方面,本实用新型涉及一种平地机,该平地机包括多个结构元件和多个液压致动器,每个液压致动器将其中两个结构元件互连,其中每个液压致动器被配置为用于相对于平地机上的第二结构元件致动平地机上的第一结构元件。每个液压致动器可以包括管,其中该管包括限定在管中的中心轴向延伸孔,该孔在管的封闭远端与管的开放近端之间延伸,并且管的厚度由管的外径与管的孔直径之间的径向距离限定。杆可以滑动地安装
在管内,其中杆在管的近端处由头部密封组件可滑动地支撑。活塞可以安装在杆的远端处,并且活塞保持组件可以附接到杆的远端并且被配置为将活塞保持在杆的远端上。耳轴帽孔可以穿过管的封闭远端来限定,并被配置为用于接收耳轴销,该耳轴销适于将管的远端枢转地连接至平地机的第一结构元件。杆眼孔可以穿过杆的近端来限定,并被配置为用于接收杆眼销,该杆眼销适于将杆的近端枢转地连接至平地机的第二结构元件。当杆和活塞完全缩回到管中,杆的远端位于管的封闭的远端附近时,从帽孔的中心到杆眼孔的中心的缩回的销至销尺寸等于479.5 mm
±
2.0 mm;从管的封闭的远端附近的活塞的第一完全缩回位置到在管的近端处与头部密封组件接触的活塞的第二完全伸出位置的冲程尺寸等于257.0 mm
±
1.5 mm;杆的直径等于45.0 mm
±
0.5 mm;并且管孔的直径等于63.0 mm
±
0.5 mm。
16.帽孔的直径等于41.28 mm
±
0.25 mm。
17.第一结构元件包括平地机的犁板铲刀。
18.第二结构元件包括平地机的前框架。
19.第一结构元件包括平地机的推土铲刀。
20.第一结构元件包括平地机的裂土器。
21.第二结构元件包括平地机的后框架。
22.第一结构元件相对于第二结构元件的致动导致以下变化中的至少一个:平地机的犁板铲刀或推土铲刀相对于平地机在其上操作的地面的位置变化,犁板铲刀或推土铲刀相对于平地机的前框架的位置变化,平地机的裂土器相对于平地机在其上操作的地面的位置变化,或者裂土器相对于平地机的后框架的位置变化。
23.在又一方面,本实用新型涉及一种液压缸,该液压缸被配置为用于相对于平地机上的第二结构元件致动平地机上的第一结构元件。该液压缸可以包括管,其中该管包括限定在管中的中心轴向延伸孔,该孔在管的封闭远端与管的开放近端之间延伸,并且管的厚度由管的外径与管的孔直径之间的径向距离限定。杆可以滑动地安装在管内,其中杆在管的近端处由头部密封组件可滑动地支撑。活塞可以安装在杆的远端处,并且活塞保持组件可以附接到杆的远端并且被配置为将活塞保持在杆的远端上。耳轴帽孔可以穿过管的封闭远端来限定,并被配置为用于接收耳轴销,该耳轴销适于将管的远端枢转地连接至平地机的第一结构元件。杆眼孔可以穿过杆的近端来限定,并被配置为用于接收杆眼销,该杆眼销适于将杆的近端枢转地连接至平地机的第二结构元件。当杆和活塞完全缩回到管中,杆的远端位于管的封闭的远端附近时,从帽孔的中心到杆眼孔的中心的缩回的销至销尺寸等于479.5 mm
±
2.0 mm;从管的封闭的远端附近的活塞的第一完全缩回位置到在管的近端处与头部密封组件接触的活塞的第二完全伸出位置的冲程尺寸等于257.0 mm
±
1.5 mm;杆的直径等于45.0 mm
±
0.5 mm;并且管孔的直径等于63.0 mm
±
0.5 mm。
24.第一结构元件相对于第二结构元件的致动导致以下变化中的至少一个:平地机的犁板铲刀或推土铲刀相对于平地机在其上操作的地面的位置变化,犁板铲刀或推土铲刀相对于平地机的前框架的位置变化,平地机的裂土器相对于平地机在其上操作的地面的位置变化,或者裂土器相对于平地机的后框架的位置变化。
25.本实用新型的技术方案可以提供改进的能量使用和节约。另外,组合来自不同回路的流体流以满足单个致动器的需求的能力可以允许减少液压系统内所需的泵的数量和/或这些泵的尺寸和容量。这些减少可以减少泵损失,提高整体效率,改善液压系统的包装,
和/或降低液压系统的成本。对于每个液压缸的冲程、销至销长度、杆直径、管孔直径、管外径、杆眼销直径和耳轴帽销直径的特定性能尺寸的应用至少部分地基于以下结果:对执行与平整过程相关联的某些任务所需的特定平地机的各种结构元件的结构和运动学分析,这还提高了平整操作的效率和质量,延长了机器的使用寿命,并减少了机器部件故障的发生或者维修或保养的需要。
附图说明
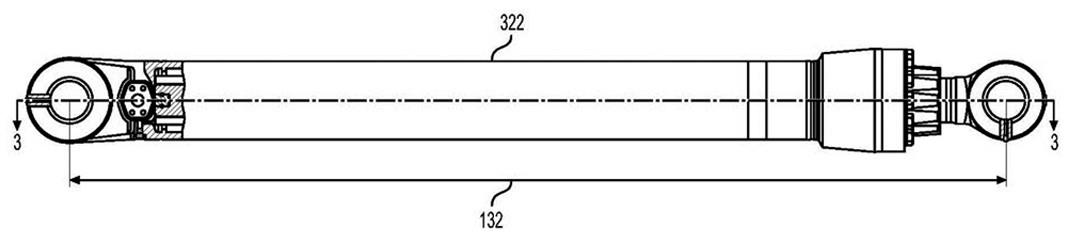
26.图1和图2示出可以用于相对于诸如平地机之类的机器的另一结构元件来致动机器上的一个结构元件的示例性液压缸;
27.图3示出了可以用于操纵平地机的示例性液压缸;和
28.图4示出了可以用于操纵平地机的另一种示例性液压缸。
具体实施方式
29.图1-图4所示的液压缸是示例性的液压缸,其可以用作平地机或其他重型机械上的致动器,这些重型机械具有协作完成任务的多个系统和部件。示例性的平地机可以包括可转向的前框架和可枢转地连接到前框架的从动后框架。前框架可以包括一对前轮(或其他牵引设备)并支撑驾驶室。后框架可以包括用于容纳动力源(例如,发动机)和相关联的冷却部件的隔室,动力源可操作地联接至后轮(或其他牵引设备),用于平地机的主要推进。后轮可以成簇地布置在从动后框架的相对侧。平地机的转向可以根据前轮转向和前框架相对于后框架的铰接。
30.平地机还可以包括地面接合作业工具,比如例如犁板铲刀和推土铲刀。犁板铲刀和推土铲刀都可以操作性地连接到前框架并由前框架支撑。在示例性实施例中,犁板铲刀可以在前轮与后轮之间的位置处从前框架的大致中点悬挂。推土铲刀可以支撑在前框架的前端处(例如,相对于正常行进方向,在前轮前方的位置处)。在一些实施例中,如果需要,后框架也可以支撑一个或多个地面接合作业工具(例如,裂土器)。可以想到的是,犁板铲刀、推土铲刀和/或裂土器可以可替代地连接至平地机的另一部分并由其支撑,比如由前框架和/或后框架的另一部分支撑。
31.犁板铲刀和推土铲刀都可以经由单独的液压装置来支撑。具体地,具有任意数量的不同液压致动器(例如,液压缸和/或液压马达)的第一液压装置可以被配置为使犁板铲刀或铲尖朝向和远离前框架竖直地移位,以使犁板铲刀左右移位,和/或使犁板铲刀围绕水平和/或竖直轴线旋转。具有任意数量的不同致动器的第二液压装置可被配置为使推土铲刀朝向和远离前框架竖直地移动。可以想到的是,如果需要,犁板铲刀和推土铲刀可以以另外的方式和/或与上述不同的方式移动。
32.平地机上的驾驶室可以容纳被配置为接收来自机器操作员的指示期望的机器和/或作业工具移动的输入的部件。具体地,驾驶室可以容纳一个或多个输入设备,这些输入设备例如体现为位于操作员座椅附近的单轴或多轴操纵杆。输入设备可以是比例型控制器,其被配置为,通过产生指示在特定方向上的期望速度和/或力的位置信号对平地机进行定位或定向,使平地机的前框架相对于后框架铰接,或者对作业工具(比如犁板、推土铲刀和裂土器)进行定位或定向。可以想到的是,不同的输入设备可以替代地或另外地包括在驾驶
室内,比如例如,轮子、旋钮、推拉设备、开关、踏板和本领域已知的其他操作员输入设备。
33.在平地机的操作期间,操作员可以从驾驶室内部操纵输入设备以执行需要高精度的任务。例如,操作员可能需要将犁板铲刀和/或推土铲刀定位在精确的位置和/或精确的方位,以便在作业场地创建计划的轮廓,而不会与平地机的另一部分和/或与作业场地的障碍物发生碰撞。类似地,操作员可能需要使平地机本身沿着精确的轨迹移动。并且,为了使操作员准确且有效地进行这些移动,并且不损坏平地机或其周围环境,操作员有时可能依赖于定位设备的位置反馈。
34.当每个平地机在作业场地周围行进时,全球导航卫星系统(gnss)、本地激光跟踪系统、或者其他类型的定位设备或系统可以与定位设备通信以监测平地机并/或地面接合作业工具(例如,犁板铲刀、推土铲刀和/或裂土器)的移动并产生相应的位置信号。位置信号可以被引导至车载控制器,以便与作业场地的电子轮廓图进行比较并进行进一步处理。其中,进一步处理可以包括确定平地机下方的当前地面位置;作业场地的计划的最终轮廓;犁板铲刀和/或推土铲刀相对于地面位置的当前高度;犁板铲刀和/或推土铲刀相对于计划的最终轮廓的当前高度;和/或推土铲刀相对于犁板铲刀的当前高度。
35.控制器可以体现为单个微处理器或多个微处理器,这些微处理器包括用于控制平地机的操作的装置。许多市售微处理器可以被配置为执行控制器的功能。控制器可以包括存储器、辅助存储设备、处理器以及用于运行应用程序的任何其他部件。各种其他电路可以与控制器相关联,比如电源电路、信号调节电路、螺线管驱动器电路和其他类型的电路。
36.上述位置反馈可以可视地提供给平地机的操作员。例如,可以在驾驶室内靠近操作员座椅设置显示器。显示器可以包括一个或多个监视器(例如,液晶显示器(lcd)、阴极射线管(crt)、个人数字助理(pda)、等离子显示器、触摸屏、便携式手持设备、或者本领域已知的任何此类显示设备),其被配置为主动地和响应地向平地机的操作员显示上述的不同高度。显示器可以连接到控制器,并且控制器可以执行指令,以在显示器上渲染与平地机的操作相关联的图形和图像。
37.在一些实施例中,显示器还可以被配置为接收指示不同机器操作模式的输入。例如,显示器可以包括一个或多个按钮(真实的或虚拟的)、开关、旋钮、转盘等,当被操作员操纵时,它们产生针对控制器的相应信号。控制器可以利用这些信号来实现例如手动操作模式、半自主操作模式和/或完全自主操作模式。在手动操作模式期间,平地机的操作员可以操纵输入设备以直接控制犁板铲刀和推土铲刀的运动。在半自主操作模式期间,操作员可以移动输入设备以直接控制仅一个作业工具(例如,仅犁板铲刀)的运动。并且响应于手动控制的作业工具的运动和/或基于上述相对位置中的一个或多个,控制器可以响应地并且自主地调节其余作业工具(例如,推土铲刀或裂土器)的运动。在自主操作模式期间,控制器可以被编程为,经由完全自主地利用来自不同传感器的输入的不同液压缸的致动来调节所有作业工具的运动。
38.各种液压装置、输入设备,控制器和显示器可以一起形成平地机控制系统。在一些实施例中,控制系统可以另外地包括与液压装置相关联的一个或多个传感器和/或一个或多个阀。控制器可以被配置为利用经由输入设备接收的输入、针对特定作业场地量身定制的电子图以及位置信息来生成用于选择性地激励阀以引起特定液压致动器的相应运动的信号。传感器可以是位置传感器,其被配置为生成指示相关作业工具(例如,犁板铲刀和推
土铲刀的切削刃)的位置的信号。在一个实施例中,传感器可以与一个或多个液压致动器相关联,并且被配置为检测致动器的伸出。基于检测到的伸出和平地机的已知运动学,控制器可以被配置为确定犁板铲刀和/或推土铲刀的位置。在另一实施例中,传感器可以是关节-角度传感器,其被配置为检测平地机的液压装置内的一个或多个连杆的枢转。基于检测到的枢转和平地机的已知运动学,控制器可以被配置为确定犁板铲刀和/或推土铲刀的位置。在又一实施例中,传感器可以被配置为直接测量犁板铲刀和/或推土铲刀的位置(例如,相对于前框架)。在任何公开的实施例中,由传感器生成的信号可以代表相对于平地机的位置或平地机的一部分的位置的偏移位置。如果需要,其他类型的传感器也可以或替代地用来确定每个铲刀的切削刃位置。
39.阀可以被配置为响应于经由输入设备接收到的手动输入和/或响应于控制器生成的命令,将加压流体选择性地引导到平地机上的各种液压装置的液压致动器内的不同室中和/或从中引导出来。例如,阀可以在泵供应通道与特定腔连接或储罐排放通道与特定通道连接的位置之间移动。如本领域中已知的,这些连接可能导致相关联的致动器内部的压力失衡,该失衡起到使致动器伸出或缩回的作用。此外,液压缸优选地设计成具有用于冲程的特定尺寸范围、完全缩回时的销至销长度、形成液压缸主体的管的孔径、管的外径、从可滑动地支撑在管内的活塞组件伸出以在活塞组件的一侧限定头端腔(无杆腔)并在活塞组件的相对侧限定杆端腔(有杆腔)的杆的直径、杆端销的直径、以及在缸的头端处的耳轴销的直径,具体取决于将使用液压缸的特定机器和负载应用。另外,用于重型机械上的液压缸可以受益于本文公开的特定性能尺寸以及诸如减震装置和头部密封装置之类的特征的组合,这些特征改善了在极端条件下的操作特性、疲劳寿命和性能。
40.用于平地机的动力源可以体现为发动机,比如例如,柴油发动机、汽油发动机、气态燃料做动力的发动机、或者本领域已知的任何其他类型的燃烧式发动机。可以想到的是,动力源可以替代地体现为非燃烧式动力源,比如燃料电池、电力存储设备、系留马达、或者本领域中已知的其他源。动力源可以产生机械或电力输出,然后其可以被转换为液压动力以使各种液压缸移动,这些液压缸用作致动器以使机器的结构元件或部分相对于彼此或相对于机器在其上运行的地面移动。平地机上的操作员平台可以包括从机器操作员接收指示期望机器操纵的输入的设备。具体地,操作员平台可以包括位于操作员座椅附近的一个或多个操作员接口设备,例如操纵杆、方向盘或踏板。操作员接口设备可以通过产生表示期望机器操纵的位移信号来启动平地机的运动,例如行进和/或工具运动。当操作员移动接口设备时,操作员可以以期望的速度和/或以期望的力影响相应的机器在期望的方向上的运动。
41.如图1和图2所示,示例性液压缸可以用作使平地机上的一个结构元件或元件组合相对于平地机的另一结构元件或元件组合移动的致动器,该液压缸可以包括管(或缸筒)322和活塞组件420,活塞组件在管322内布置在杆332的远端处,以在活塞组件420的相对侧上形成第一腔352和相对的第二腔354。管322的一端由在远端342处的缸底部或耳轴帽封闭。在相对端处,管322由缸盖和头部密封组件520封闭,在缸盖和头部密封组件处,活塞杆332从缸中出来。活塞组件420的帽端侧上的第一腔352可以被认为是液压缸的“杆端”腔,并且第二腔354可以被认为是液压缸的“头端”腔。图2所示的活塞组件420的示例性实施例可以设置在杆332的远端处。活塞组件420可以通过各种方式保持在杆332的远端上,比如在活塞保持组件与套筒之间,或者通过活塞杆332的远端处的螺母保持,如图2所示。杆332可以
具有直径334,并且活塞组件420还可以包括沿着活塞组件420的外周面间隔开的多个环形密封件,当杆332和活塞组件420在管322内来回往复运动时,随着供给头端腔354和杆端腔352以及从中释放的液压流体的压力和/或流量的变化,这些环形密封件在活塞组件420与管322的内周向表面之间形成可滑动的密封。
42.头端腔354和杆端腔352可以各自被选择性地供应加压流体并排出加压流体,以使活塞组件420在管322内移位,从而使杆332从管322伸出和缩回,并且改变液压缸的有效长度。杆332从管322的伸出和缩回导致平地机的一个部分或连接至杆332的连杆结构相对于机器的另一部分或连接至固定在管322的远端342处的耳轴帽的连杆结构移动。进入和离开头端腔354和杆端腔352的流体的流量可以与液压缸的平移速度有关,而腔354、352之间的压力差可以与液压缸施加在平地机的相关联连杆结构上的力有关。
43.如图2所示,杆332的近端344可以穿过头部密封组件520,该头部密封组件520附接在杆332穿过的管322的端部处。头部密封组件520可以包括沿着头部密封组件520的内周向周面的多个轴向间隔开的密封件,这些密封件被配置为与杆332的近端344的外周面形成可滑动的密封。多个螺栓可以将头部密封组件520固定至杆端凸台,其中头部密封组件520的一部分从管322的杆端凸台至少部分地径向向内延伸,并被配置为在杆332和活塞420相对于管322往复运动时径向地支撑杆332的近端344。杆332的近端344可以包括直径为252的杆眼孔,其垂直于杆332的中心轴线延伸穿过杆332,并被配置为接收用于将杆332的近端344枢转地附接到机器10的第一结构元件的杆眼销,比如将液压缸的杆端枢转地连接到平地机的第一结构元件的杆眼销。管322的远端342可以类似地包括直径为242的耳轴帽孔,该耳轴帽孔垂直于杆332和管322的中心轴线延伸穿过管322的远端342,并被配置为接收将管322的远端342枢转地附接到平地机的第二结构元件的耳轴销,比如被配置为将液压缸的头端枢转地连接到第二结构元件的耳轴销。
44.在图3和图4所示的液压缸22和24的示例性实施例中,基于对于平地机的特定应用中的每个液压缸的特定性能要求,不同尺寸的确定液压缸的值。特定性能尺寸包括但不限于:每个管322的管孔直径324和外径326、由每个管322的管孔直径与外径之间的径向距离限定的每个管322的厚度、每个杆332的杆直径334、延伸穿过杆332的近端344的杆眼孔的直径252、延伸穿过管322的远端342的耳轴帽孔的直径242、远端342处的耳轴的外径、或者接收远端342处的耳轴的轴承的内径、当杆332完全缩回管322中时在杆眼孔的中心与耳轴帽孔的中心或接收远端342处的耳轴的轴承的中心之间的销至销长度132、以及由杆332从管322内的完全缩回位置行进到完全伸出位置时移动的总距离确定的冲程222。杆眼孔的直径252、以及因此被配置为用于将每个液压缸的杆332枢转地连接到机器10的结构元件的杆眼销的直径、以及延伸穿过管322的远端342的耳轴帽孔的直径242、或者在一些实施例中在管322的远端处被接收在轴承内的耳轴的直径、并且因此耳轴销的直径或被配置为用于将每个液压缸的管322枢转地连接到机器10的另一个结构元件的在管的远端处的耳轴的直径,至少部分地基于销可枢转地附接到其上的平地机的结构元件的尺寸以及在操作过程中这些元件承受的负载和结构应力,比如在每个液压缸的致动期间在一定负载下将承受的剪切应力、扭转应力、压缩应力和拉伸应力来确定。图1所示的每个液压缸的销至销尺寸132(其也可以表示为当将管322的远端处的耳轴被接收在轴承内时的销至耳轴尺寸)至少部分地基于特定机器的结构元件(比如每个平地机的前框架和犁板)的尺寸、运动范围、工作负载
和结构相互关系来确定。类似地,图2所示的每个液压缸的冲程222至少部分地基于每个机器的结构元件的尺寸、运动范围、工作负载以及结构相互关系来确定。杆332和活塞420在图1和图2中示出为完全缩回到管322中,其中冲程222由活塞420从该完全缩回位置行进到杆332的完全伸出位置的距离确定,在完全缩回位置,活塞在管322的封闭远端342处触底,在完全伸出位置,活塞420接触连接到管322的近端的头部密封组件520。
45.平地机可以包括具有多个回路的液压系统,这些回路驱动上述的流体致动器(液压缸)以使平地机的一部分(比如犁板)相对于平地机的另一部分(比如前框架)移动。每个回路可以是类似的,并且包括多个互连且协作的流体部件,这有助于相关联的致动器的使用和控制。例如,每个回路可以包括泵,该泵经由由左侧通道和右侧通道形成的闭合环路流体地连接至其相关联的致动器。具体地,每个回路可以包括公共的左泵通道、公共的右泵通道、用于每个致动器的左致动器通道和用于每个致动器的右致动器通道。在具有线性致动器的回路中,左致动器通道和右致动器通道通常可以分别被称为头端通道和杆端通道。在每个回路内,相应的泵可以经由左泵通道和右泵通道以及执左致动器通道和右致动器通道的组合连接到其相关联的致动器。
46.为了使线性致动器缩回,特定回路的右致动器通道可以填充有由泵加压的流体,而相应的左致动器通道可以填充有从线性致动器返回的流体。相反,为了使线性致动器伸出,左致动器通道可以填充有由泵加压的流体,而右致动器通道可以填充有离开线性致动器的流体。每个泵可以具有可变的排量并且被控制为从其相关联的致动器抽出流体并且以指定的升高的压力沿单一方向将流体排放回致动器。也就是说,泵可以包括冲程调节机构,例如斜盘,冲程调节机构的位置尤其基于致动器的期望速度而被液压-机械地调节,从而改变泵的输出(例如,排放速率)。泵的排量可以从基本上没有流体从泵排出的零排量位置调节到流体以最大速率从泵排出到右泵通道中的最大排量位置。泵可以通过例如副轴、皮带或以其他合适的方式可驱动地连接至平地机的动力源。可替代地,泵可以经由转矩变换器、齿轮箱、电路或以本领域已知的任何其他方式间接地连接至动力源。可以想到的是,根据需要,不同回路的泵可以串联(例如,经由相同的轴)或并联(经由齿轮系)连接至动力源。
47.被配置为向液压致动器提供加压的液压流体的泵也可以选择性地作为马达运行。更具体地,当相关联的致动器在超速状态下运行时,从致动器排出的流体可以具有高于相应泵的输出压力的升高的压力。在这种情况下,通过泵返回的致动器流体的升高的压力可以起到驱动泵在有动力源或没有动力源的情况下旋转的作用。在某些情况下,泵甚至能够将能量传递给动力源,从而提高动力源的效率和/或容量。
48.在根据本实用新型的液压缸的一个示例性实施例中,诸如用于控制平地机的运动方向的转向液压缸22,如图3所示,该液压缸在完全缩回时可以具有等于479.5 mm
±
2.0 mm的销至销尺寸132,其中杆332和活塞420在管322的封闭远端342处触底。该示例性液压缸的冲程222可以等于257.0 mm
±
1.5 mm。管孔直径324可以等于63.0 mm
±
0.5 mm,并且管外径326可以等于76.0 mm
±
0.5 mm。杆332的直径334可以等于45.0 mm
±
0.5 mm。帽孔直径242可以等于41.28 mm
±
0.25 mm。在一些示例性实施例中,可以将内径为25.4 mm
±
0.25 mm的轴承压配合在帽孔直径242内。根据基于物理学的等式、有限元分析、经验证据、历史证据和其他计算分析中的一种或多种,并结合考虑以下因素,诸如连接到缸的杆端和帽端的机器上的各部件之间的运动学相互关系、各个结构部件的运动范围、在机器运行期间液压缸将
承受的负载、期望的疲劳寿命、液压流体压力和机械安全系数,来确定特定机器的公开尺寸范围。
49.在根据本实用新型的液压缸的另一示例性实施例中,诸如用于控制平地机的运动方向的转向液压缸24,如图4所示,该液压缸在完全缩回时可以具有等于479.5 mm
±
2.0 mm的销至销尺寸132,其中杆332和活塞420在管322的封闭远端342处触底。该示例性液压缸的冲程222可以等于257.0 mm
±
1.5 mm。管孔直径324可以等于63.0 mm
±
0.5 mm,并且管外径326可以等于76.0
±
0.5 mm。杆332的直径334可以等于45.0 mm
±
0.5 mm。帽孔直径242可以等于41.28 mm
±
0.25 mm。在一些示例性实施例中,可以将内径为25.4 mm
±
0.25 mm的轴承压配合在帽孔直径242内。根据基于物理学的等式、有限元分析、经验证据、历史证据和其他计算分析中的一种或多种,并结合考虑以下因素,诸如连接到缸的杆端和帽端的机器上的各部件之间的运动学相互关系、各个结构部件的运动范围、在机器运行期间液压缸将承受的负载、期望的疲劳寿命、液压流体压力和机械安全系数,来确定特定机器的公开尺寸范围。
50.工业实用性
51.所公开的液压缸可以适用于任何动平地机,其中对于每个液压缸的冲程、销至销长度、杆直径、管孔直径、管外径、杆眼销直径和耳轴帽销直径的特定性能尺寸的应用至少部分地基于以下结果:对执行某些任务所需的特定机器的各种结构元件的结构和运动学分析,比如,调整犁板或推土铲刀的位置,以沿待平整的表面生成期望轮廓。特定机器上使用的每个液压缸的特定性能尺寸可以至少部分地基于以下来确定:基于物理学的等式、以及经验和历史数据,包括对一定负载下的结构元件的疲劳分析、特定机器的尺寸以及它将运行的环境、机器正在平整的材质、将枢转地连接每个液压缸的头端和杆端的链接点的相对位置、液压系统压力、每个液压缸的各个部件上的环向应力、剪切应力、压缩应力和拉伸应力、以及其他机械设计考虑因素。
52.在平地机的操作期间,操作员可以命令机器的一个或多个部件相对于机器的另一部件或相对于地面的特定运动。指示期望运动的一个或多个信号可以由操作员操纵的接口设备生成,或者半自主或完全自主地操作,然后与机器性能信息(例如传感器数据,如压力数据、位置数据、速度数据、泵排量数据和本领域已知的其他数据)一起传输到电子控制器。
53.响应于来自接口设备的信号,并且基于机器性能信息,控制器可以生成针对泵、马达和/或阀的控制信号,所述控制信号控制液压流体向每个液压缸的活塞一侧上的头端腔和活塞的相对侧上的杆端腔的流动。在一个示例性实施方式中,控制器可以生成控制信号,该控制信号使第一回路的泵增加其排量并将流体以比由该泵向左泵通道排出流体更大的速率排出到右泵通道中。另外,控制器可以生成控制信号,该控制信号使切换阀朝着两个流动传递位置之一移动和/或保持在两个流动传递位置之一中。在来自右泵通道的流体进入并通过右行进马达(例如,或者进入液压缸的头端腔或杆端腔)之后,来自马达或来自液压缸中的活塞组件的相对侧上的头端腔或杆端腔的流体可能经由左泵通道返回到泵。此时,右行进马达的速度,或者液压缸中的杆和活塞组件的移动速度,可以取决于泵的排出速率以及由切换阀对经过右行进马达或者流入或流出液压缸的流体流量所提供的限制量(如果有的话)。右行进马达的运动可以通过将切换阀移动到两个流动传递位置中的另一个而反向。
54.第一液压缸可以与第二液压缸同时运动和/或独立于第二液压缸的运动。具体地,当第一液压缸从泵接收流体时,一个或多个计量阀可以移动以将一些流体转移到第二液压缸中。同时,每个计量阀可以移动以将废流体从液压缸引导回泵。当切换阀和适当的计量阀完全打开时,第一液压缸和第二液压缸的运动可以关联,并取决于来自泵的流体的流量。
55.在一些操作期间,从它们的相关联的泵提供给各个液压缸的流体的流量可能不足以满足操作员需求。在这种情况期间,控制器可以使一个或多个相应组合阀的阀元件(多个)将流体从一个流体流动回路传递到另一流体流动回路,从而增加可用于特定液压缸的流体的流量。此时,从一些液压缸排出的流体可以经由组合阀返回到期望流体流动回路的泵。经由其他组合阀在其他回路之间的流量共享可以以类似的方式实现。
56.当从一个致动器排出的流体的量超过相应泵可以有效地消耗回流流体的速率时,也可以选择性地实现流量共享。这种排出流体中的一些可以经由计量阀被重新引导回到另一液压缸的杆端腔或头端腔中。这种操作可以称为再生,并且导致效率提高。
57.由机器上的泵提供的流量在许多操作期间可能基本上不受限制,从而在致动过程中不会不必要地浪费大量能量。因此,本实用新型的实施例可以提供改进的能量使用和节约。另外,组合来自不同回路的流体流以满足单个致动器的需求的能力可以允许减少液压系统内所需的泵的数量和/或这些泵的尺寸和容量。这些减少可以减少泵损失,提高整体效率,改善液压系统的包装,和/或降低液压系统的成本。对于每个液压缸的冲程、销至销长度、杆直径、管孔直径、管外径、杆眼销直径和耳轴帽销直径的特定性能尺寸的应用至少部分地基于以下结果:对执行与平整过程相关联的某些任务所需的特定平地机的各种结构元件的结构和运动学分析,这还提高了平整操作的效率和质量,延长了机器的使用寿命,并减少了机器部件故障的发生或者维修或保养的需要。
58.对于本领域技术人员将显而易见的是,可以对所公开的液压致动器和系统进行各种修改和变型。考虑到所公开的液压系统的规格和实践,其他实施例对于本领域技术人员将是显而易见的。说明书和示例旨在仅被认为是示例性的,真正的保护范围由所附权利要求及其等同物确定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
