1.本公开涉及清洁技术领域,尤其涉及一种清洁机器人。
背景技术:
2.随着生活水平的提高,清洁机器人在办公和家庭中的运用变的越来越普及,清洁机器人承担了地面清扫工作。清洁机器人一般设置了多个清洁组件以实现不同的清洁功能。
3.由于各清洁组件的清洁功能不同,目前,各清洁组件一般设置在底盘上,需要升降或越障时,需要通过不同驱动结构控制底盘及清洁组件等升降,无法实现多个清洁组件统一升降,如此,各清洁组件分布比较分散、控制升降比较麻烦、拆装不便。
技术实现要素:
4.本公开提出了一种清洁机器人,以解决现有技术中清洁组件的拆装不便,控制不方便的技术问题。
5.为了解决上述技术问题,本公开提出了一种清洁机器人,包括底盘、第一升降组件、连接结构、基座和至少两个清洁组件;
6.所述第一升降组件安装于所述底盘上,至少两个所述清洁组件连接在所述基座上,所述基座通过所述连接结构和所述底盘铰接相连,所述第一升降组件和所述基座传动相连以带动所述基座升降。
7.可选地,所述第一升降组件包括第一驱动元件和所述第一柔性连接件,所述第一驱动元件安装于所述底盘上,所述第一柔性连接件的一端和所述第一驱动元件相连,所述第一柔性连接件的另一端和所述基座相连。
8.可选地,所述清洁机器人还包括第一滑轮,所述第一滑轮安装于所述底盘底部,所述第一柔性连接件挂设在所述第一滑轮上。
9.可选地,所述底盘包括底板、安装座和安装柱,所述第一驱动元件安装于所述底板上,所述底板上设有安装孔;
10.所述安装座连接在所述底板底部,所述安装座位于所述安装孔处,所述安装柱架设在所述安装座上,所述第一滑轮设在所述安装柱上。
11.可选地,所述底盘还包括限位座,所述限位座包括连接板和两限位板,两所述限位板连接在所述连接板上,两所述限位板相互平行,所述连接板安装于所述安装座上,两所述限位板分别位于所述第一滑轮两侧,所述第一柔性连接件穿设于所述第一滑轮和所述连接板之间。
12.可选地,所述基座上具有重力中心点,所述重力中心点为所述基座和所述清洁组件的重力中心,所述重力中心点的两侧分别设有至少一所述清洁组件;
13.所述第一柔性连接件的一端和所述第一驱动元件相连,所述第一柔性连接件的另一端和所述基座相连,所述第一柔性连接件和所述基座的连接处位于所述重力中心点。
14.可选地,所述至少两个清洁组件包括滚刷组件、边刷组件、吸水扒组件和尘推组件;所述滚刷组件、所述边刷组件、所述吸水扒组件和所述尘推组件均连接在所述基座上;或者,所述滚刷组件、所述边刷组件、所述吸水扒组件组件均连接在所述基座上,所述尘推组件连接在所述底盘上;
15.沿所述清洁机器人的前进方向,所述滚刷组件、所述边刷组件、所述吸水扒组件和所述尘推组件从前至后依次设置。
16.可选地,所述清洁机器人还包括第二升降组件,所述第二升降组件和所述吸水扒组件、尘推组件连接,以控制所述吸水扒组件和/或所述尘推组件升降;或者,所述第二升降组件与所述尘推连接,以控制所述尘推升降。
17.可选地,所述基座包括第一支架、第二支架和中扫框架,所述第一支架和所述第二支架铰接相连,所述第一支架安装于所述中扫框架上,所述第一升降组件和所述第一支架传动相连;
18.所述滚刷组件和所述边刷组件安装于所述第一支架上,所述吸水扒组件、所述尘推组件和所述第二升降组件安装于所述第二支架上。
19.可选地,所述第一支架包括支架本体、挡部和两相互平行的支撑板,两所述支撑板安装于所述支架本体上;所述第二支架一端的两侧分别铰接在两所述支撑板上,所述挡部位于所述第二支架一端的上方,所述挡部能够挡住所述第二支架;
20.所述第一升降组件和所述支架本体传动相连,所述滚刷组件和所述边刷组件均连接在所述支架本体上。
21.可选地,所述基座上设有支撑轮。
22.与现有技术相比,本公开的清洁机器人中,通过设置和底盘可铰接分离的基座,至少两个清洁组件安装于基座上,第一升降组件带动基座升降,从而带动清洁组件整体升降。由此,清洁组件只要安装在基座上即可,安装方便,且方便拆卸、更换和维修,整体性好。此外,基座和底盘铰接分离,在升降过程中,第一升降组件只需要较小的力即可拉动基座及清洁组件整体升降,不需要拉动底盘升降,可以节省拉动底盘升降的驱动力。
附图说明
23.一个或多个实施例通过与之对应的附图进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
24.图1为本公开一实施例中清洁机器人的爆炸图;
25.图2为本公开一实施例中清洁机器人的第一立体图;
26.图3为本公开一实施例中连接结构的结构示意图;
27.图4为本公开一实施例中清洁机器人的第二立体图;
28.图5为图4中标识部分a处的放大图;
29.图6为本公开一实施例中底盘、第一柔性连接件、第一滑轮、安装座和限位座的部分爆炸图;
30.图7为本公开一实施例中清洁机器人的第三立体图;
31.图8为本公开一实施例中清洁机器人的第一展开图,其中底盘未显示;
32.图9为本公开一实施例中清洁机器人的第二展开图,其中底盘未显示;
33.图10为本公开一实施例中第二升降组件和尘推组件的连接关系图。
具体实施方式
34.为了便于理解本公开,下面结合附图和具体实施例,对本公开进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明的目的。
35.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本公开的技术领域的技术人员通常理解的含义相同。在本公开的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本公开。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
36.此外,在说明书和权利要求书中的术语第一、第二、第三等仅用于区别相同技术特征的描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量,也不一定描述次序或时间顺序。在合适的情况下术语是可以互换的。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
37.类似地,在说明书和权利要求书中同样使用术语“固定”、“连接”,不应理解为限于直接的连接。因此,表达“装置a与装置b连接”不应该限于装置或系统中装置a直接连接到装置b,其意思是装置a与装置b之间具有路径,这可以是包括其他装置或工具的路径。
38.此外,下面所描述的本公开不同实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
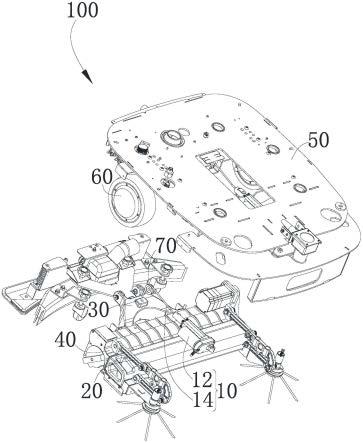
39.请参照图1至图3,一种清洁机器人100,包括底盘50、第一升降组件10、连接结构20、基座30和至少两个清洁组件40;所述第一升降组件10安装于所述底盘50上,至少两个所述清洁组件40连接在所述基座30上,所述基座30通过所述连接结构20和所述底盘50铰接相连,所述第一升降组件10和所述基座30传动相连以带动所述基座30升降。
40.第一升降组件10、连接结构20、基座30和清洁组件40等直接或间接设置在底盘50上,底盘50用于支撑清洁机器人100的整体重量,底盘50上还可以设置水箱组件、电气组件等。
41.本实施例的清洁机器人100中,通过设置和底盘50可铰接分离的基座30,至少两个清洁组件40均安装于基座30上,第一升降组件10带动基座30升降,从而带动清洁组件40整体升降。由此,清洁组件40只要安装在基座30上即可,安装方便,整体性好。此外,基座30和底盘50铰接通过连接结构20铰接连接,基座30和底盘50相对分离,基座30能够相对底盘50摆动,在升降过程中,第一升降组件10只需要较小的力即可拉动基座30及清洁组件40整体升降,不需要拉动底盘50升降,可以节省拉动底盘50升降的驱动力。
42.在一实施例中,所述第一升降组件10包括第一驱动元件12和所述第一柔性连接件14,所述第一驱动元件12安装于所述底盘50上,所述第一柔性连接件12的一端和所述第一驱动元件14的伸缩端相连,所述第一柔性连接件的另一端和所述基座相连。所述第一驱动元件12通过所述第一柔性连接件14能够带动所述基座30升降,且各清洁组件40不会与地面
发生刚性接触,能够有效避免损坏清洁组件40。其中,第一驱动元件12可以为电缸或气缸等。第一柔性连接件12为拉绳、钢丝绳等,拉绳的材质可以为塑料、金属等。
43.在一实施例中,所述清洁机器人100还包括行走轮60,所述行走轮60设在所述底盘50上以用于支撑所述底盘50,所述第一驱动元件12安装于所述底盘50上。通过行走轮60可以推动底盘50行进,从而可以带动各清洁组件40行走,各清洁组件40在行走过程中进行作业。
44.在一实施例中,所述清洁机器人100还包括第一滑轮70,所述第一滑轮70安装于所述底盘50底部,所述第一柔性连接件14挂设在所述第一滑轮70上。第一滑轮70对第一柔性连接件14具有导向、换向及固定的作用,当第一滑轮70安装于底盘50底部时,基座30及各清洁组件40的重心均位于第一滑轮70的下方,第一驱动元件12伸缩时可以拉动第一柔性连接件14伸缩,从而使基座30及各清洁组件40实现升降,基座30及各清洁组件40受力好,便于驱动升降。
45.在一实施例中,所述连接结构20包括第一连接座22、第二连接座24、第一连杆26、第二连杆28,所述第一连杆26的两端分别和所述第一连接座22、所述第二连接座24铰接相连,所述第二连杆28的两端分别和所述第一连接座22、所述第二连接座24铰接相连;第一连接座22安装于底盘50上,所述基座30所述第二连接座24相连;所述第一连接座22和所述第二连接座24均为一体成型,所述第一连杆26和所述第二连杆28均为不可伸缩的杆。所述第一连杆26的两端可以通过插销等结构和所述第一连接座22、所述第二连接座24铰接相连,两插销可以相互平行。同理,所述第二连杆28的两端分别通过插销等结构和所述第一连接座22、所述第二连接座24铰接相连。
46.本实施例的清洁机器人100中,第一连接座22、第一连杆26、第二连杆28、第二连接座24组成了四连杆机构,且由于第一连接座22和第二连接座24是一体成型的,所以,第一连接座22和第二连接座24不存在装配精度的问题,可以使最后组装的连接结构20的精度也很高,因此,第一连杆26和第二连杆28均可以设置为不可伸缩的杆。不需要设置一些气弹簧等结构辅助连接结构20动作,且第一连杆26和第二连杆28均为不可伸缩的杆,相对于可伸缩的杆,第一连杆26和第二连杆28的结构更加简单,连接精度更高。
47.各清洁组件40在清扫的过程中,若遇到障碍物时,由于连接结构20能够摆动,使各清洁组件40能够具有一定的浮动,各清洁组件40能够顺利越过障碍物,且各清洁组件40都是可以保持水平统一浮动动作。连接结构20对于各清洁组件40具有固定的作用,能够防止各清洁组件40在升降过程或清洁机器人100行走过程中出现晃动等现象。
48.其中,本实施例中一体成型的第一连接座22和第二连接座24是指,第一连接座22和第二连接座24分别是一个整块结构,第一连接座22和第二连接座24是不需要装配的。可以理解的是,第一连接座22和第二连接座24也可以分别由部件组装而成,但每增加一次组装工序,则对第一连接座22和第二连接座24的精度影响越大。
49.可以理解的是,根据实际需要,在其他一些实施例中,连接结构20还可以为杆状结构或其他结构,该连接结构20的一端和底盘50铰接相连,该连接结构20的另一端和基座30铰接相连,在第一驱动元件12的驱动下,基座30能够相对底盘50摆动。
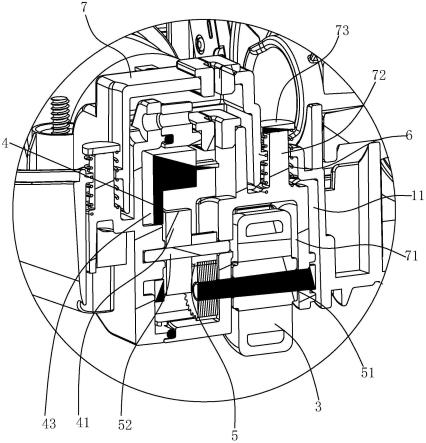
50.请参照图4和图5,在一实施例中,所述底盘50包括底板52、安装座54和安装柱56,所述第一驱动元件12安装于所述底板52上,所述底板52上设有安装孔522;所述安装座54连
接在所述底板52底部,所述安装座54位于所述安装孔522处,所述安装柱56架设在所述安装座54上,所述第一滑轮70设在所述安装柱56上。安装柱56用于安装第一滑轮70,安装座54用于安装安装柱56,安装孔522可以避免第一柔性连接件14运行时,第一柔性连接件14及第一滑轮70等结构发生干涉。给安装座54及安装柱56预留了安装位置。
51.请参照图6至图8,在一实施例中,所述底盘50还包括限位座58,所述限位座58包括连接板582和两限位板584,两所述限位板584连接在所述连接板582上,两所述限位板584相互平行,所述连接板582安装于所述安装座54上,两所述限位板584分别位于所述第一滑轮70两侧,所述第一柔性连接件14穿设于所述第一滑轮70和所述连接板582之间。两限位板584能够对第一滑轮70两侧进行保护和限位,能够防止第一滑轮70沿轴向发生较大偏移。第一柔性连接件14卡在第一滑轮70的轮槽里,连接板582可以挡住第一柔性连接件14,因此,第一柔性连接件14在运行时,基本位于连接板582和第一滑轮70的轮槽之间,不会从第一滑轮70的轮槽上脱落,故连接板582对第一柔性连接件14具有限位的作用。
52.在其他一些实施例中,限位座58还包括两卡板586,两卡板586分别连接在连接板582的上,两卡板586分别和两限位板584平行,两限位板584位于两卡板586之间,两限位板584和两卡板586位于连接板582的同一侧。两卡板586相互远离的一面分别设有凸起5862。
53.底板52上设有两卡孔524,两卡孔524分别位于安装孔522的两侧,两卡板586上的两凸起5862分别可以卡在两卡孔524内。当两凸起5862卡在两卡孔524内时,限位座58固定在了底板52上。
54.在一些实施例中,所述基座30上具有重力中心点,所述重力中心点为所述基座30和所述清洁组件40的重力中心,所述重力中心点的两侧分别设有至少一所述清洁组件40;所述第一柔性连接件14的一端和所述第一驱动元件12相连,所述第一柔性连接件14的另一端和所述基座30相连,所述第一柔性连接件14和所述基座30的连接处位于所述重力中心点。当第一驱动元件12通过第一柔性连接件14拉动基座30升降时,故基座30两侧的受力更加均衡,基座30在升降的过程中不会发生倾斜,升降也更加平稳。具体的,基座30两侧的清洁组件40的数量相等,如此,可以确保重力中心点在基座30上。
55.在一些实施例中,两卡孔524设置在安装座54的两侧。按压两卡板586,使两卡板586相互靠近时,可以使卡板586从卡孔524中退出。
56.在一实施例中,所述清洁组件40包括滚刷组件42、边刷组件44、吸水扒组件46和尘推组件48,所述滚刷组件42、所述边刷组件44、所述吸水扒组件46和所述尘推组件48均连接在所述基座30上,沿所述清洁机器人100的前进方向,所述滚刷组件42、所述边刷组件44、所述吸水扒组件46和所述尘推组件48从前至后依次设置。清洁机器人100前进清扫时,边刷组件44将垃圾扫入底盘50下方中部进行聚集,其中,边刷组件44包括两个边刷,两个边刷分别位于底盘50的两侧。然后,滚刷组件42将底盘50下方中部聚集的垃圾扫入收纳,当地面灰尘较大时,滚刷组件42还能够喷水。吸水扒组件46则能够将地面的脏水和剩下的垃圾进一步吸附清洁,最后,通过尘推组件48对该地面进行拖地。其中,滚刷组件42包括电机422、尘盒424、滚刷本体426和洒水管(图中未显示),电机422和滚刷本体426传动相连,电机422带动滚刷本体426转动,滚刷本体426转动的过程中将底盘50下方中部聚集的垃圾扫入尘盒424中。洒水管上设有洒水孔,洒水管和水源连通,通过洒水孔可以对地面洒水。吸水扒组件46和负压气源连通,能够将地面的脏水和杂物吸附清洁。
57.在一实施例中,所述基座30包括第一支架32、第二支架34和中扫框架36,所述第一支架32和所述第二支架34铰接相连,所述第一支架32安装于所述中扫框架36上,所述第一升降组件10和所述第一支架32传动相连;所述滚刷组件42和所述边刷组件44安装于所述第一支架32上,所述吸水扒组件46、所述尘推组件48和所述第二升降组件90安装于所述第二支架34上。具体的,滚刷组件42安装于中扫框架16上,边刷组件44和滚刷组件12固定连接。吸水扒组件46安装于第二支架14上,第二升降组件90安装于第二支架14上,尘推组件48安装于第二升降组件90上。重力中心点位于第一支架32上,该重力中心点为第一支架32、第二支架14、中扫框架16、滚刷组件42、边刷组件44、吸水扒组件46、尘推组件48和第二升降组件90的重力中心,第一支架32、第二支架14、中扫框架16、滚刷组件42、边刷组件44、吸水扒组件46、尘推组件48和第二升降组件90能够同步升降。当第二升降组件90带动吸水扒组件46和尘推组件48升降时,吸水扒组件46和尘推组件48通过第二支架14相对第一支架32摆动。第二支架14对吸水扒组件46和尘推组件48具有一定的限位和固定作用,能够防止吸水扒组件46和尘推组件48脱离既定轨迹。吸水扒组件46和尘推组件48通过第二支架34铰接连接在第一支架32上,则可以选择使用吸水扒组件46和尘推组件48。当不需要使用吸水扒组件46和尘推组件48时,则提起第二支架34,从而将吸水扒组件46和尘推组件48提起。当需要使用吸水扒组件46和尘推组件48时,则可以将第二支架34放下,使吸水扒组件46和/或尘推组件48工作。因而,可以使清洁机器人100具有多种作业模式。如,当将第一支架32整体拉起时,可以使第二支架34往下摆,此时,可以使吸水扒组件46和尘推组件48中的一种或两种作业。当将第一支架32整体放下时,此时边刷组件44和滚刷组件42是可以作业的,另外,还可以选择使吸水扒组件46和尘推组件48中的至少一个作业。
58.可以理解的是,在一些实施例中,基座30还可以是能够安装滚刷组件42、边刷组件44、吸水扒组件46、尘推组件48和第二升降组件90的其他结构或装置。
59.在一实施例中,所述第一支架32包括支架本体322、挡部324和两相互平行的支撑板326,两所述支撑板326安装于所述支架本体322上;所述第二支架34一端的两侧分别铰接在两所述支撑板326上,所述挡部324位于所述第二支架34一端的上方,所述挡部324能够挡住所述第二支架34;所述第一柔性连接件14的另一端和所述支架本体322相连,所述滚刷组件42和所述边刷组件44均连接在所述支架本体322上。挡部324对第二支架34具有限位的作用,当将支架本体322被第一柔性连接件14拉起时,防止第二支架34过去下摆,避免尘推组件48和吸水扒组件46未脱离地面。
60.由于在第一支架32上直接安装了滚刷组件42和边刷组件44,又通过第二支架34间接安装了尘推组件48和吸水扒组件46,因此,第一支架32承受了较大的作用力,第一支架32易产生变形。在一实施例中,所述基座30上设有支撑轮38,支撑轮38对基座30具有支撑的作用,能够防止第一支架32变形。具体的,支撑轮38安装在支架本体322上。其中,支撑轮38为万向轮,行走轮60包括导向轮和后轮,导向轮位于清洁机器人100前进方向的前方,后轮位于清洁机器人100前进方向的后方。
61.请参照图8至图10,在一实施例中,第二支架34沿竖直方向上下摆动。清洁机器人100还包括第二升降组件90,第二升降组件90设在底盘50上,第二升降组件90和尘推组件48、吸水扒组件46传动相连,以带动尘推组件48和吸水扒组件46交替升降。具体的,第二升降组件90包括第一固定座91、第二固定座92、导柱93、弹性元件94、第二驱动元件95、第二柔
性连接件96;所述第一固定座91安装于所述基座30上,所述导柱93安装于所述第一固定座91上,所述第二固定座92活动连接在所述导柱93上,所述第二固定座92和所述尘推组件48相连,所述第二驱动元件95安装于所述第二固定座92上,所述第二柔性连接件96的一端和所述第二驱动元件95传动相连,所述第二柔性连接件96的另一端固定,所述弹性元件94抵设在所述第二固定座92上,所述弹性元件94能够推动所述固定座贴紧所述第一固定座91;通过所述第二驱动元件95的伸缩驱动,能够带动所述第二固定座92相对所述第一固定座91沿所述导柱93移动。
62.其中,导柱93用于对第二固定座92的移动路径进行限定和导向。第二驱动元件95可以为电缸或气缸或电机等等。第二柔性连接件96为拉绳、钢丝绳等,拉绳的材质可以为塑料、金属等。弹性元件94为弹簧,弹性元件94的另一端固定在第一固定座91或清洁机器人上。通过弹簧能够推动第二固定座92贴紧第一固定座91,弹簧对第二固定座92具有支撑的作用,且可以使尘推组件48与地面保持恒定的压力,确保尘推组件48具有较好的清扫效果。另外,弹簧还具有缓冲的作用,可以进一步避免尘推组件48和地面产生刚性接触。
63.本实施例第二升降组件90带动尘推组件48和吸水扒组件46交替升降的原理为:尘推组件48和吸水扒组件46均位于底盘50的底部,在初始状态下,尘推组件48相对于吸水扒组件46更靠近清洁目标,尘推组件48是和清洁目标接触的,且由于尘推组件48和清洁目标接触,吸水扒组件46被翘起,吸水扒组件46与清洁目标脱离接触。即尘推组件48和地面是接触的,而吸水扒组件46和地面脱离接触。具体的,在初始状态下,第一驱动元件12通过第一柔性连接件14拉动第一支架32升起,但第二驱动元件95通过控制第二柔性连接件96的伸缩量使尘推组件48和清洁目标接触。或者,第一驱动元件12通过第一柔性连接件14拉动第一支架32降落,但第二驱动元件95通过控制第二柔性连接件96的伸缩量使尘推组件48和清洁目标接触。
64.然后,第二驱动元件95拉动第二柔性连接件96,第二柔性连接件96拉动第二固定座92,使第二固定座92压缩弹性元件94,从而带动尘推组件48与清洁目标脱离接触,由于尘推组件48和清洁目标脱离接触,即尘推组件48和地面脱离接触后,吸水扒组件46在自身重力的作用下降落和清洁目标接触,此时,吸水扒组件46可以对清洁目标进行吸水清扫。当第二驱动元件95展开第二柔性连接件96时,在尘推组件48和第二固定座92的自重作用,以及弹性元件94的推力下,使第二固定座92贴紧第一固定座91,也使尘推组件48与清洁目标接触,吸水扒组件46重新升起,吸水扒组件46与清洁目标脱离接触,从而尘推组件48可以对清洁目标的垃圾进行清扫。
65.可以理解的是,根据实际需要,初始状态还可以是,吸水扒组件46和清洁目标接触,而尘推组件48和清洁目标不接触。
66.在一种实施例中,还可以通过第一驱动元件12控制第一柔性连接件14的伸缩量,控制第一支架32的升降程度,同时,再通过第二驱动元件95控制第二柔性连接件96的伸缩量,使吸水扒组件46和尘推组件48同时和清洁目标接触,或者,吸水扒组件46和尘推组件48同时和清洁目标同时脱离接触。具体的,第二驱动元件95控制第二柔性连接件96的伸缩量,使尘推组件48、吸水扒组件46和清洁目标的距离相等,此时,在第一驱动元件12的驱动下,若将第一支架32升起到一定程度,则尘推组件48、吸水扒组件46均与清洁目标脱离接触,若将第一支架32降落到一定程度,则尘推组件48、吸水扒组件46均与清洁目标接触。
67.本实施例的清洁机器人100中,通过第二驱动元件95的驱动、第二柔性连接件96的传动和弹性元件94的弹力,使得吸水扒组件46和尘推组件48交替使用时,不需要拆卸,操作方便。弹性元件94能够对尘推组件48产生支撑力,弹性元件94能够使尘推组件48与清洁目标保持恒定的压力,弹性元件94和第二柔性连接件96均具有缓冲的作用,能够避免尘推组件48和清洁目标发生刚性接触,能够快速越过障碍物,不会对尘推组件48及其他零件造成损害。
68.由于尘推组件48一般需要贴近清洁目标,故尘推组件48一般是位于底盘50的下方,第二柔性连接件96需要沿竖直方向拉伸尘推组件48。在一实施例中,第二驱动元件95为伸缩驱动元件,伸缩驱动元件为电缸、气缸等具有伸缩行程的驱动装置。所述第二升降组件90还包括两第二滑轮97,两第二滑轮97安装于所述第二固定座92上,其中一第二滑轮97位于第二驱动元件95的伸缩端的延伸方向上;第二柔性连接件96的另一端通过另一第二滑轮97朝远离所述尘推组件48的方向延伸,最终第二柔性连接件96能够和底盘50连接,使尘推组件48在第二驱动元件95的作用下升降。两第二滑轮97能够改变第二柔性连接件96的延伸方向,能够节约空间,便于布局。
69.在一实施例中,所述滚刷组件42、所述边刷组件44和所述吸水扒组件46均连接在所述基座30上所述尘推组件48安装在底盘50上,尘推组件48和吸水扒组件46之间断开连接。具体的,吸水扒组件46安装于第二支架34上,吸水扒组件46随着第二支架34摆动。另外,滚刷组件42、边刷组件44、吸水扒组件46通过第一升降组件10可以同步升降,尘推组件48通过第二升降组件90单独升降,当第二升降组件90带动尘推组件48收缩并被抬起时,吸水扒组件46依然可以和地面接触,当第二升降组件90将尘推组件48放下,使尘推组件48与地面接触时,依然可以将吸水扒组件46顶起,从而实现吸水扒组件46和尘推组件48的交替升降。
70.可以理解的是,根据实际需要,在一实施例中,第一升降组件10通过基座30带动滚刷组件42和边刷组件44升降,第二升降组件90还可以和吸水扒组件46、尘推组件48相连,第二升降组件90还可以带动吸水扒组件46和尘推组件48共同升降。
71.最后应说明的是:以上实施例仅用以说明本公开的技术方案,而非对其限制;在本公开的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本公开的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本公开进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述每个实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本公开每个实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。