1.本实用新型涉及一种清洁装置。
背景技术:
2.随着人们生活水平的不断提高,人们对智能清洁设备的需要越来越多,除了传统的洗机器、洗碗机这些产品的需求外,目前人们对扫地机、拖地机、洗地机、吸尘器这些清洁产品的需求逐渐上升。
3.家用的洗地机、吸尘器通常需要用户手持推动来进行清洁工作,但是由于洗地机、吸尘器的清扫部件需要和地面之间充分接触才能达到良好的清洗效果,如此清扫部件与地面之间的摩擦力会要求对洗地机的推动力较大,用户在操作时较为费力。为了解决用户操作费力的问题,现有技术中在清洁产品中增设了助力机构,以使得推动操作更加省力。洗地机、吸尘器这些清洁产品在使用时,用户会向前推动或者向后拉动两个方西的作用,进而使得清洁产品会有前进和后退两个运动方向,相应针对不同的运动方向,需要提供不同方向的助力,如此则需要检测清洁产品的运动方向。
4.现有的清洁产品上设置的方向检测模块通常设置在行走轮上,而助力机构也与行走轮相连接,如此操作清洁产品的行走方向换向时,基于助力机构对行走轮的驱动,行走轮存在较大的运动惯性,导致换向时的方向检测存在滞后,相应会导致换向时的助力方向不能及时变化,出现换向时用户操作阻力较大的情况。
技术实现要素:
5.本实用新型所要解决的第一个技术问题是针对上述现有技术提供一种能够提高对换向检测的灵敏性的清洁装置。
6.本实用新型所要解决的第二个技术问题是针对上述现有技术提供一种能够基于用户操作方向的变化时,基于换向情况及时提供对应方向助力,以解决换向时操作阻力大问题的清洁装置。
7.本实用新型解决上述第一个技术问题所采用的技术方案为:一种清洁装置,包括机壳、设置在机壳上的两个行走轮,其特征在于:还包括随机壳同步转动的辅助轮、用于检测机壳移动方向的检测模块、传动机构;所述辅助轮、检测模块、传动机构均设置在机壳上,所述检测模块包括码盘以及检测元件,所述辅助轮和码盘通过传动机构传动连接,所述码盘上分布设置有多个信号元件,所述检测元件对应于码盘设置而能检测获取到信号元件的信号。
8.可选择地,所述信号元件为磁体,所述检测元件为霍尔传感器,所述码盘的一侧设有第一检测电路板,所述霍尔传感器面向码盘而设在第一检测电路板上且与第一检测电路板电信号连接。
9.可选择地,所述信号元件为光栅,所述检测元件为光电编码传感器,所述码盘的一侧设有第二检测电路板;所述光电编码传感器包括u型的支架以及设置在支架上的光线发
射器和光线接收器,支架的另个侧壁分别面向码盘设置在码盘的两侧,所述光线发射器面向码盘设置在支架的一个侧壁上,光线接收器对应于光线发射器而面向码盘设置在支架的另一侧壁上,并且光线接收器与第二检测电路板电信号连接。
10.为了使得辅助轮能够根据与机壳下方的工作面紧密接触,进而保证辅助轮能够随着用户操作清洁装置的方向能够同步移动,所述辅助轮设置在机壳的底部,所述辅助轮与机壳之间设置有弹性件,弹性件具有下压辅助轮的趋势。
11.优选地,所述机壳的底部设有向下开口的安装槽,所述辅助轮、检测模块、传动机构均设在所述安装槽内。
12.为了实现对检测模块的防水、防尘保护,对所述安装槽内设有壳体,所述检测模块、传动机构设置在壳体内,所述壳体上成型有供辅助轮嵌入并向下开口的嵌槽。
13.优选地,所述安装槽的顶壁上开设有开孔,所述壳体的顶面上设有匹配伸入在开孔内的定位轴,所述定位轴的上端连接有限位扣,所述定位轴外套设有所述弹性件,所述弹性件的两端分别抵在壳体的顶面与安装槽的顶壁上。
14.本实用新型解决上述第二个技术问题所采用的技术方案为:所述机壳内设置有控制电路板、能提供前进和后退方向助力的助力机构,所述控制电路板分别与检测模块、助力机构电信号连接,所述助力机构与至少一个行走轮相连接。
15.优选地,所述助力机构为电机,所述电机的输出轴与一个行走轮相连接。
16.优选地,传动机构为传动齿轮组,所述传动齿轮组通过第一连接轴与辅助轮相连接,所述传动齿轮组通过第二连接轴与码盘相连接。
17.与现有技术相比,本实用新型的优点在于:本实用新型中的清洁装置,额外设置没有动力驱动的辅助轮,另外,还设置了通过传动机构与辅助轮相联动的检测模块,如此当用户改变对清洁装置的操作方向时,辅助轮能够及时更换转动方向,进而通过检测模块及时检测获取辅助轮的检测方向,也即及时准确地检测到清洁装置的移动方向,进而根据清洁装置的移动方向实现清洁装置的其他功能控制。如可以更及时的改变对清洁装置的助力驱动方向,避免出现用户操作阻力过大的情况。另外也能根据及时的方向信息控制出水等其他额外的功能。
附图说明
18.图1为本实用新型实施例一中清洁装置的立体图。
19.图2为图1的另一视角图。
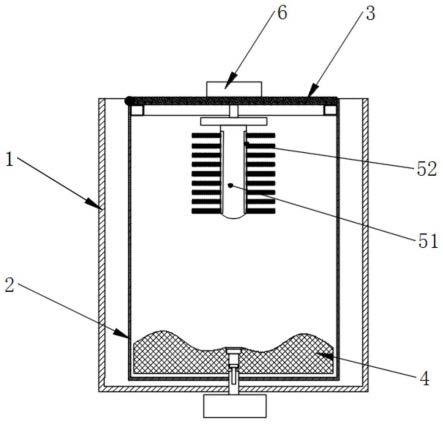
20.图3为本实用新型实施例一中清洁装置的剖视图。
21.图4为图3部分放大图。
22.图5为本实用新型实施例二中清洁装置的剖视图。
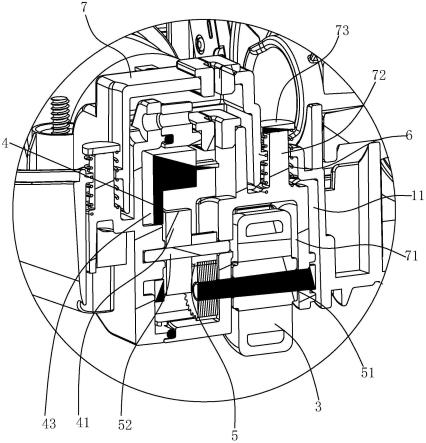
23.图6为图5的部分放大图。
具体实施方式
24.以下结合附图实施例对本实用新型作进一步详细描述。
25.实施例一
26.如图1至图4所示,本实施例中的清洁装置,包括机壳1,设置在机壳1上的两个行走
轮2、辅助轮3、检测模块4、传动机构5、助力机构9、控制电路板8,控制电路板8分别与检测模块4、助力机构9电信号连接。
27.两个行走轮2对称的设置在机壳1上,通常两个行走轮2分别设置在机壳1的两侧,根据清洁装置的具体结构,具体设计行走轮2的安装位置以及安装方式。本实施例中的两个行走轮2转动连接在机壳1后部的两侧。
28.辅助轮3设置在能随机壳1同步移动的位置,本实施例中的辅助轮3直径小于行走轮2的直径,该辅助轮3主要配合检测模块4工作,进而获取机壳1的移动方向,也即清洁装置的移动方向,进而方便根据清洁装置的前进、后退方向实现清洁装置的功能控制。
29.本实施例中,将辅助轮3设置在机壳1的底部,如此辅助轮3可以与工作面实现直接接触,当用户向前推动和向后拉动清洁装置时,辅助轮3能够及时的根据清洁装置进行相同方向的转动。为了使得辅助轮3能够根据与机壳1下方的工作面紧密接触,进而进一步保证辅助轮3能够随着用户操作清洁装置的方向而同方向移动,在辅助轮3与机壳1之间设置有弹性件6,弹性件6具有下压辅助轮3的趋势,如此使得辅助轮3始终贴紧工作面,保证辅助轮3与机壳1的高度同步性。
30.为了方便安装辅助轮3、检测模块4、传动机构5这些结构,在机壳1的底部设有向下开口的安装槽11,辅助轮3、检测模块4、传动机构5均设在所述安装槽11内。具体地,安装槽11内设有壳体7,检测模块4、传动机构5设置在壳体7内,如此壳体7可以实现对检测模块4的防水、防尘保护,保证检测模块4工作的可靠性。壳体7上成型有供辅助轮3嵌入并向下开口的嵌槽71。安装槽11的顶壁上开设有开孔,壳体7的顶面上设有匹配伸入在开孔内的定位轴72,定位轴72的上端连接有限位扣73,定位轴72外套设有所述弹性件6,弹性件6的两端分别抵在壳体7的顶面与安装槽11的顶壁上。如此通过弹性件6对壳体7的向下弹压作用力来实现对辅助轮3的向下弹压,使得辅助轮3与作用面密切接触。
31.检测模块4用于检测机壳1移动方向,该检测模块4通过传动机构5与辅助轮3传动连接。具体地,检测模块4包括码盘41以及检测元件,辅助轮3和码盘41通过传动机构5传动连接。本实施例中,传动机构5为传动齿轮组,所述传动齿轮组通过第一连接轴51与辅助轮3相连接,所述传动齿轮组通过第二连接轴52与码盘41相连接。
32.码盘41上分布设置有多个信号元件,检测元件对应于码盘41设置而能检测获取到信号元件的信号。本实施例中具体地,信号元件为磁体,这些磁体沿周向分布设置在码盘41上,相应的检测元件为霍尔传感器,霍尔传感器包括两个相对于磁性件的移动方向位置有差异的霍尔元件,码盘41的一侧设有第一检测电路板43,霍尔传感器面向码盘41而设在第一检测电路板43上且与第一检测电路板43电信号连接,第一检测电路板43与控制电路板8电信号连接。工作时,码盘41在传动机构5的作用下随着辅助轮3进行转动,霍尔传感器中的两个霍尔元件由于位置有差异,使得两个霍尔元件检测出的磁性信号时序有差异,进而第一检测电路板43输出两个诗句有差异的磁性信号波形至控制电路板8,控制电路板8根据磁性信号波形判断机壳1的行走方向为前进方向或者后退方向。
33.该检测模块4在较短的时间内即能获取到清洁装置的移动方向信息,并且磁信号的检测不易受普通的污物影响,工作更加可靠。
34.控制电路板8、助力机构9均设置在机壳1内。该助力机构9用于为行走轮2提供前进和后退方向的助力,控制电路板8与助力机构9电信号连接,助力机构9与至少一个行走轮2
相连接。本实施例中的助力机构9为电机,电机的输出轴与一个行走轮2相连接。基于前述利用检测模块4实现对清洁装置前进、后退方向的检测,进而控制电机的驱动方向,使得在判断清洁装置换向移动后,能够及时控制电机调整驱动方向,避免换向时操作阻力大的问题。即在用户操作清洁装置换向移动时,即使行走轮2的转动具有转动惯性,存在行走方向调整的滞后性,依靠辅助轮3和检测模块4即使获取换向信息后,也能及时调整助力机构9的助力方向,避免对行走轮2的助力驱动方向调整滞后而带来的增大阻力的问题。
35.该清洁装置,额外设置没有动力驱动的辅助轮3,另外,还设置了通过传动机构5与辅助轮3相联动的检测模块4,如此当用户改变对清洁装置的操作方向时,辅助轮3能够及时更换转动方向,进而通过检测模块4及时检测获取辅助轮3的检测方向,也即及时准确地检测到清洁装置的移动方向,进而根据清洁装置的移动方向实现清洁装置的其他功能控制。如可以更及时的改变对清洁装置的助力驱动方向,避免出现用户操作阻力过大的情况。另外也能根据及时的方向信息控制出水等其他额外的功能。
36.实施例二
37.如图5和图6所示,本实施例与实施例一的差异仅在于:信号元件为光栅,光栅在码盘41上的排列方式根据需要具体设置。检测元件为光电编码传感器44,码盘41的一侧设有第二检测电路板45,第二检测电路板45与控制电路板8电信号连接。光电编码传感器44包括u型的支架以及设置在支架上的光线发射器和光线接收器,支架的另个侧壁分别面向码盘41设置在码盘41的两侧,光线发射器面向码盘41设置在支架的一个侧壁上,光线接收器对应于光线发射器而面向码盘41设置在支架的另一侧壁上,并且光线接收器与第二检测电路板45电信号连接,第二检测电路板45与控制电路板8电信号连接。工作时,光线发射器发出光线而作用在码盘41上的光栅上,随着码盘41的转动,接收器获取码盘41上光栅上的光线信号,进而通过第二检测电路板45的处理形成波形信号,控制电路板8根据第二检测电路板45传送的波形信号获取清洁装置的移动方向。该检测模块4结构简单,检测结果准确及时。
38.在本实用新型的说明书及权利要求书中使用了表示方向的术语,诸如“前”、“后”、“上”、“下”、“左”、“右”、“侧”、“顶”、“底”等,用来描述本发明的各种示例结构部分和元件,但是在此使用这些术语只是为了方便说明的目的,是基于附图中显示的示例方位而确定的。由于本发明所公开的实施例可以按照不同的方向设置,所以这些表示方向的术语只是作为说明而不应视作为限制,比如“上”、“下”并不一定被限定为与重力方向相反或一致的方向。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。