1.本实用新型涉及自动烹饪技术领域,具体而言,涉及一种自动烹饪设备。
背景技术:
2.自动烹饪设备极大地方便了人们的生活。然而,现有的自动烹饪设备或自动烹饪机器人,仅能够实现食材翻炒过程的自动化,不具备从冷藏存储到制作及存储菜品全程无人工参与功能。而工厂的流水线制菜设备体积较大,不适合家庭、食堂、办公空间等室内场所以及野外等户外场所使用。
技术实现要素:
3.本实用新型的目的在于提供一种自动烹饪设备,以解决现有烹饪设备不具备从冷藏存储到制作及存储菜品全程无人工参与功能的技术问题。
4.本实用新型提供的自动烹饪设备,包括机架,所述机架由上至下依次设置相连通的食材区、烹饪区和储盘区,其中,所述食材区设置有保温外壳以及用于对所述保温外壳的内腔制冷的制冷机,所述保温外壳的内部设置有食材架、食材盒和投送装置,所述保温外壳开设有落料口,所述落料口可开闭地设置有密封盖;所述食材盒活动设置于所述食材架,所述投送装置被配置为使所述食材盒相对于所述食材架运动,以使所述食材盒中的食材经所述落料口进入所述烹饪区;所述烹饪区设置有锅具、烹饪炊具、调味品加注装置和锅具驱动装置,所述烹饪炊具用于烹饪所述锅具内的食材,所述调味品加注装置被配置为向所述锅具添加调味品,所述锅具驱动装置被配置为驱动所述锅具运动,且所述锅具至少具有能够承接食材的第一位置、能够承接所述调味品的第二位置和能够使锅口朝向所述储盘区的第三位置;所述储盘区被配置为存放盘子,所述盘子能够承接由锅口倒出的菜品;所述制冷机、所述投送装置、所述烹饪炊具和所述锅具驱动装置均与自动烹饪设备的控制模块电连接。
5.进一步地,所述食材架具有使所述食材盒装入和送出的安装口,其中,所述食材架为单排结构,单排所述食材架的安装口朝向所述自动烹饪设备的同一侧,所述投送装置设置于单排所述食材架的背离其安装口的一侧;或者,所述食材架为双排结构,双排所述食材架具有沿水平方向的安装间隔,且双排所述食材架的安装口分别朝向所述自动烹饪设备相背的两侧,所述投送装置设置于所述安装间隔。
6.进一步地,所述食材盒包括外盒和内盒,所述外盒与所述食材架固定连接,且所述外盒具有沿设定方向相对设置的出口和驱动口,所述出口的朝向与所述安装口的朝向相同,所述内盒容纳于所述外盒,所述投送装置穿过所述驱动口与所述内盒传动连接,用于驱动所述内盒沿设定方向移动,其中,所述内盒具有食材出口,在所述内盒自所述出口伸出的状态下,所述食材出口与所述烹饪区连通;在所述内盒完全容纳于所述外盒的状态下,所述食材出口封闭;所述设定方向与所述上下方向呈角度。
7.进一步地,所述内盒包括盒体和与所述盒体转动连接的盒盖,所述食材出口设置
于所述盒体,所述食材出口朝下,其中,所述盒盖被配置为在所述内盒自所述出口伸出后,在重力作用下向下转动打开所述食材出口,以及在所述内盒朝靠近所述外盒的方向移动时向上转动封闭所述食材出口。
8.进一步地,所述盒盖朝向所述内盒的盒腔的一面设置有吸湿层。
9.进一步地,所述投送装置包括数量与所述食材架排数相同的电动推杆,在所述食材架为双排结构时,两个所述电动推杆的输出端相背设置;所述电动推杆的输出端固定连接电磁铁,所述电磁铁被配置为在通电状态下与对应的所述内盒磁性连接,以及在断电状态下与对应的所述内盒分离。
10.进一步地,每排所述食材架均包括多个安装口,各排所述食材架的多个所述安装口呈行列排布,所述投送装置还包括竖直移动机构和水平移动机构,其中,所述竖直移动机构安装于所述机架,所述水平移动机构安装于所述竖直移动机构的动力输出部,由所述竖直移动机构驱动沿竖直方向移动;所述电动推杆安装于所述水平移动机构的动力输出部,由所述水平移动机构驱动沿水平方向移动;或者,所述水平移动机构安装于所述机架,所述竖直移动机构安装于所述水平移动机构的动力输出部,由所述水平移动机构驱动沿水平方向移动;所述电动推杆安装于所述竖直移动机构的动力输出部,由所述竖直移动机构驱动沿竖直方向移动。
11.进一步地,各所述电动推杆的外壳安装有信息采集装置,所述信息采集装置被配置为获取对应的所述食材盒内部的食材性状特征信息;所述信息采集装置与所述控制模块电连接。
12.进一步地,所述落料口开设于所述保温外壳的底部,所述密封盖转动设置于所述保温外壳,所述保温外壳安装有落料电机,所述落料电机的电机轴与所述密封盖传动连接,用于驱动所述密封盖打开或关闭所述落料口;所述落料电机与所述控制模块电连接。
13.进一步地,所述自动烹饪设备还包括导料斗,所述导料斗被配置为将由所述食材盒送出的食材引导至所述落料口。
14.进一步地,所述烹饪炊具包括电磁炉,所述电磁炉设置于处于所述第二位置的锅具的侧向,所述锅具驱动装置包括翻转电机和回转电机,其中,所述翻转电机安装于所述机架,所述翻转电机的电机轴固定连接所述回转电机的外壳,所述回转电机的电机轴与所述锅具的底部固定连接,所述翻转电机被配置为驱动所述锅具在所述第一位置、所述第二位置和所述第三位置切换,所述回转电机被配置为驱动所述锅具自转。
15.进一步地,所述回转电机的电机轴通过第一锅座卡套与所述锅具固定连接,所述锅具的底部固定设置有底座,所述第一锅座卡套包括第一固定半环、第一活动半环和第一锁扣,其中,所述第一固定半环与所述回转电机的电机轴固定连接,所述第一固定半环的第一端与所述第一活动半环的第一端铰接,所述第一固定半环的第二端与所述第一活动半环的第二端通过所述第一锁扣连接,所述第一固定半环和所述第一活动半环共同作用以可拆卸地夹持所述底座。
16.进一步地,所述烹饪炊具还包括空气炸锅盖,所述锅具还具有锅口朝向所述空气炸锅盖的第四位置,其中,所述空气炸锅盖可移动地设置于所述机架,用于靠近或远离所述锅具;所述空气炸锅盖与所述锅具的锅口配合。
17.进一步地,所述机架固定设置有盖体升降导轨,所述空气炸锅盖通过第二锅座卡
套与所述盖体升降导轨滑动连接,所述第二锅座卡套包括第二固定半环、第二活动半环和第二锁扣,其中,所述第二固定半环滑动设置于所述盖体升降导轨,所述第二固定半环的第一端与所述第二活动半环的第一端铰接,所述第二固定半环的第二端与所述第二活动半环的第二端通过所述第二锁扣连接,所述第二固定半环和所述第二活动半环共同作用以可拆卸地夹持所述空气炸锅盖。
18.进一步地,所述储盘区包括间隔设置的出盘位置和接菜位置,其中,所述出盘位置开设有出盘口,所述出盘口的下方设置有出盘升降装置,所述出盘升降装置被配置为驱动叠放的盘子逐一地由所述出盘口露出;所述储盘区设置有运盘机构,所述运盘机构被配置为将所述出盘位置的盘子转运至所述接菜位置;所述运盘机构与所述控制模块电连接。
19.进一步地,所述运盘机构包括拨杆,所述拨杆可转动地设置于所述机架,所述拨杆为环状结构,所述环状结构的至少部分环段的内周面与所述盘子的外径匹配,所述拨杆能够将所述出盘位置的盘子拨送至所述接菜位置。
20.进一步地,所述储盘区还包括存盘位置,所述出盘位置、所述接菜位置和所述存盘位置依次设置,且所述运盘机构还能够将所述接菜位置的盘子转运至所述存盘位置,其中,所述存盘位置开设有存盘口,所述存盘口的下方设置有存盘升降装置,所述存盘升降装置的升降输出部固定连接有存盘承托座,所述存盘承托座用于承接处于所述存盘口的盘子。
21.进一步地,所述盘子包括底壁和环绕所述底壁设置的围壁,所述围壁不低于盘子中菜品的高度。
22.进一步地,所述储盘区还设置有洗锅池,所述锅具还具有锅口朝向所述洗锅池的第五位置,其中,所述洗锅池内设置有喷头,所述喷头的入口连接有增压水泵,所述喷头的出口朝向所述锅具;所述增压水泵与所述控制模块电连接。
23.进一步地,所述调味品加注装置包括多个液体盒,所述液体盒的底端设置有蠕动泵,所述蠕动泵被配置为将所述液体盒内的调味品泵送至所述锅具;所述蠕动泵与所述控制模块电连接。
24.进一步地,所述液体盒设置有液位传感器,所述液位传感器被配置为监测所述液体盒内部的液体余量,所述液位传感器与所述控制模块电连接。
25.本实用新型自动烹饪设备带来的有益效果是:
26.该自动烹饪设备在使用时,制冷机工作,对保温外壳的内腔进行制冷,此过程中,密封盖将落料口封闭,保温外壳处于密闭状态;食材架位于保温外壳的内部,食材盒活动设置于食材架,从而达到利用制冷机对食材盒进行制冷操作、进而达到对食材的保鲜目的。当需要利用该自动烹饪设备进行自动烹饪时,可以向控制模块发送相应的控制指令,利用控制模块对自动烹饪设备的控制实现自动化操作。具体地,可以利用锅具驱动装置驱动锅具运动至第一位置,并利用投送装置使食材盒中的食材向下落入锅具中,该过程中,密封盖处于打开状态,食材区通过落料口与烹饪区连通,食材盒中的食材经落料口进入锅具;之后,再利用锅具驱动装置驱动锅具运动至第二位置,进行调味品的添加,并利用烹饪炊具对锅具内的食材进行烹饪;烹饪完成后,再次利用锅具驱动装置驱动锅具运动,使之运动至第三位置,以使锅口朝向储盘区,从而使锅具中完成烹饪的食材能够通过锅口落入储盘区的盘子中,利用储盘区的盘子实现对菜品的承接。
27.该自动烹饪设备通过上述设置,能够达到食材从冷藏存储到制作及存储菜品全程
无人工参与的目的,实现了冷藏食材、投送食材、烹饪食材和盛装菜品过程的一体化,而且,食材区、烹饪区和储盘区沿上下方向设置,能够有效减少自动烹饪设备的空间占用,使得该自动烹饪设备还具有小型化的优势,适合家庭、食堂、办公空间等室内场所以及野外等户外场所使用。
附图说明
28.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
29.图1为本实用新型实施例提供的自动烹饪设备的三维结构示意图;
30.图2为本实用新型实施例提供的自动烹饪设备的结构主视图;
31.图3为本实用新型实施例提供的自动烹饪设备处于食材区部分的三维结构示意图;
32.图4为本实用新型实施例提供的自动烹饪设备处于烹饪区部分的局部结构主视图;
33.图5为本实用新型实施例提供的自动烹饪设备处于烹饪区部分的结构主视图;
34.图6为本实用新型实施例提供的自动烹饪设备的食材盒处于封闭位置时的结构侧视图;
35.图7为本实用新型实施例提供的自动烹饪设备的食材盒处于打开位置时的结构侧视图;
36.图8为本实用新型实施例提供的自动烹饪设备处于储盘区部分的三维结构示意图一;
37.图9为本实用新型实施例提供的自动烹饪设备处于储盘区部分的三维结构示意图二;
38.图10为本实用新型实施例提供的自动烹饪设备的食材向烹饪区运动的原理示意图;
39.图11为本实用新型实施例提供的自动烹饪设备设置有双排食材架时的俯视结构示意图;
40.图12为本实用新型实施例提供的自动烹饪设备设置有单排食材架时的侧视结构示意图;
41.图13为本实用新型实施例提供的自动烹饪设备设置有单排食材架时的俯视结构示意图;
42.图14为本实用新型实施例提供的自动烹饪设备的锅具与第一锅座卡套的连接示意图;
43.图15为本实用新型实施例提供的自动烹饪设备的空气炸锅盖与第二锅座卡套的连接示意图。
44.附图标记说明:
45.010-机架;020-食材区;030-烹饪区;040-储盘区;050-盘子;
46.100-食材盒;200-制冷机;300-投送装置;400-锅具;500-烹饪炊具;600-调味品加注装置;700-导料斗;900-保温外壳;
47.110-外盒;111-出口;112-驱动口;113-固定磁铁;120-内盒;121-盒体;122-盒盖;123-食材出口;
48.310-电动推杆;320-电磁铁;330-竖直移动机构;331-投送升降电机;332-投送升降同步带;333-传动轴;340-水平移动机构;341-投送水平电机;342-投送水平同步带;350-信息采集装置;
49.410-锅具驱动装置;411-翻转电机;412-回转电机;413-旋转轴承套;420-第一锅座卡套;421-第一固定半环;422-第一活动半环;423-第一锁扣;430-底座;
50.510-电磁炉;520-空气炸锅盖;531-盖体升降电机;532-盖体升降滑轨;533-盖体固定板;540-第二锅座卡套;541-第二固定半环;542-第二活动半环;543-第二锁扣;
51.610-液体盒;620-蠕动泵;630-液位传感器;
52.810-出盘口;820-出盘升降装置;821-出盘升降同步带;822-出盘升降电机;830-运盘机构;831-拨杆;840-存盘口;850-存盘升降装置;851-存盘升降同步带;852-存盘升降电机;861-存盘承托座;862-出盘承托座;870-洗锅池;880-增压水泵;
53.910-食材架;911-安装口;912-安装间隔;920-密封盖;930-落料电机;940-外门。
具体实施方式
54.为使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本实用新型的具体实施例做详细的说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
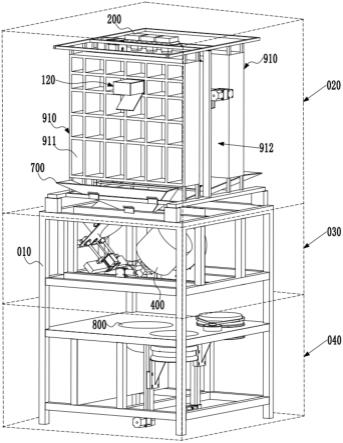
55.图1为本实施例提供的自动烹饪设备的三维结构示意图,图2为本实施例提供的自动烹饪设备的结构主视图。如图1和图2所示,本实施例提供了一种自动烹饪设备,包括机架010,其中,机架010由上至下依次设置相连通的食材区020、烹饪区030和储盘区040。
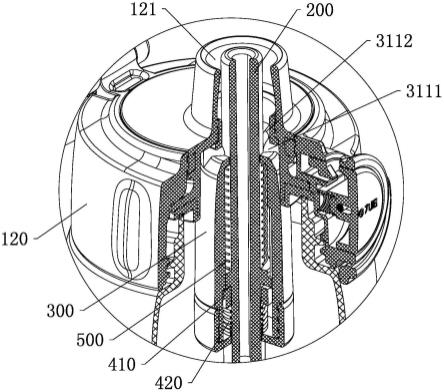
56.图3为本实施例提供的自动烹饪设备处于食材区020部分的三维结构示意图,图10为本实施例提供的自动烹饪设备的食材向烹饪区运动的原理示意图。请继续参照图1和图2,并结合图3和图10,本实施例中,食材区020设置有保温外壳900以及用于对保温外壳900的内腔制冷的制冷机200,保温外壳900的内部设置有食材架910、食材盒100和投送装置300,具体地,保温外壳900开设有落料口,落料口可开闭地设置有密封盖920;食材盒100活动设置于食材架910,投送装置300被配置为使食材盒100相对于食材架910运动,以使食材盒100中的食材经落料口进入烹饪区030。
57.图4为本实施例提供的自动烹饪设备处于烹饪区030部分的局部结构主视图,图5为本实施例提供的自动烹饪设备处于烹饪区030部分的结构主视图。请继续参照图1和图2,并结合图4和图5,本实施例中,烹饪区030设置有锅具400、烹饪炊具500、调味品加注装置600和锅具驱动装置410,具体地,烹饪炊具500用于烹饪锅具400内的食材,调味品加注装置600被配置为向锅具400添加调味品,锅具驱动装置410被配置为驱动锅具400运动,且锅具400至少具有能够承接食材的第一位置、能够承接调味品的第二位置和能够使锅口朝向储盘区040的第三位置;储盘区040被配置为存放盘子050,盘子050能够承接由锅口倒出的菜品。制冷机200、投送装置300、烹饪炊具500和锅具驱动装置410均与自动烹饪设备的控制模
块电连接。
58.该自动烹饪设备在使用时,制冷机200工作,对保温外壳900的内腔进行制冷,此过程中,密封盖920将落料口封闭,保温外壳900处于密闭状态;食材架910位于保温外壳900的内部,食材盒100活动设置于食材架910,从而达到利用制冷机200对食材盒100进行制冷操作、进而达到对食材的保鲜目的。当需要利用该自动烹饪设备进行自动烹饪时,可以向控制模块发送相应的控制指令,利用控制模块对自动烹饪设备的控制实现自动化操作。具体地,可以利用锅具驱动装置410驱动锅具400运动至第一位置,并利用投送装置300使食材盒100中的食材向下落入锅具400中,该过程中,密封盖920处于打开状态,食材区020通过落料口与烹饪区030连通,食材盒100中的食材经落料口进入锅具400;之后,再利用锅具驱动装置410驱动锅具400运动至第二位置,进行调味品的添加,并利用烹饪炊具500对锅具400内的食材进行烹饪;烹饪完成后,再次利用锅具驱动装置410驱动锅具400运动,使之运动至第三位置,以使锅口朝向储盘区040,从而使锅具400中完成烹饪的食材能够通过锅口落入储盘区040的盘子050中,利用储盘区040的盘子050实现对菜品的承接。
59.该自动烹饪设备通过上述设置,能够达到食材从冷藏存储到制作及存储菜品全程无人工参与的目的,实现了冷藏食材、投送食材、烹饪食材和盛装菜品过程的一体化,而且,食材区020、烹饪区030和储盘区040沿上下方向设置,能够有效减少自动烹饪设备的空间占用,使得该自动烹饪设备还具有小型化的优势,适合家庭、食堂、办公空间等室内场所以及野外等户外场所使用。
60.需要说明的是,图2中,
①
、
②
、
③
、
④
、
⑤
分别表示锅具400的第一位置、第二位置、第三位置、第四位置和第五位置。
61.本实施例中,落料口开设于保温外壳900的底部,密封盖920转动设置于保温外壳900,请继续参照图10,保温外壳900安装有落料电机930,落料电机930的电机轴与密封盖920传动连接,用于驱动密封盖920打开或关闭落料口;落料电机930与控制模块电连接。
62.当控制模块接收到对食材自动烹饪的指令时,控制落料电机930启动,在落料电机930的驱动下,密封盖920旋转,将落料口打开,使得食材架910中的食材能够经落料口进入烹饪区;当完成食材的投放操作后,落料电机930将进一步动作,驱动密封盖920反向旋转,将落料口关闭,以保证保温外壳900的封闭性,从而保证对食材的保鲜。
63.需要说明的是,控制模块如何接收控制指令,并进一步控制制冷机200、投送装置300、烹饪炊具500、锅具驱动装置410和落料电机930动作,为本领域技术人员可以根据现有技术获得的,本实施例中,仅仅是在结构上对自动烹饪设备作出改进。
64.请继续参照图1,本实施例中,食材架910具有使食材盒100装入和送出的安装口911,其中,食材架910为双排结构,双排食材架910具有沿水平方向的安装间隔912,且双排食材架910的安装口911分别朝向自动烹饪设备相背的两侧,投送装置300设置于上述安装间隔912。
65.双排食材架910的设置,能够实现对食材的尽可能多的储存,满足了多用户条件下的使用需求。
66.图11为本实施例提供的自动烹饪设备设置有双排食材架910时的俯视结构示意图。请继续参照图1,并结合图11,当自动烹饪设备设置双排食材架910时,保温外壳900具有相对设置的外门940,在图11视角下,相对设置的外门940分别位于保温外壳900的上部和下
部,在实际使用中,也就是在使用自动烹饪设备进行烹饪时,这种上部和下部对应的可以是保温外壳900的左侧和右侧。这种设置形式,便于用户从保温外壳900的两侧向每排食材架910补充食材。
67.在其他实施例中,食材架910也可以为单排结构。图12为本实用新型实施例提供的自动烹饪设备设置有单排食材架910时的侧视结构示意图,图13为本实用新型实施例提供的自动烹饪设备设置有单排食材架910时的俯视结构示意图。如图12和图13所示,食材架910为单排结构,单排食材架910的安装口911朝向自动烹饪设备的同一侧,投送装置300设置于单排食材架910的背离其安装口911的一侧。
68.单排食材架910的设置,能够减少自动烹饪设备的体积,从而减少自动烹饪设备对横向安装空间的占用。这种单排食材架910的自动烹饪设备,更加适用于用户相对较少的情形,在满足用户用餐需求的同时,还能够有效减少自动烹饪设备所占用的空间。
69.请继续参照图13,当自动烹饪设备设置单排食材架910时,保温外壳900的一侧设置外门940,在图13视角下,外门940位于保温外壳900的右部,在实际使用中,也就是在使用自动烹饪设备进行烹饪时,该右部对应的可以是保温外壳900的前侧。这种设置形式,便于用户打开外门940,以向食材架910补充食材。
70.请继续参照图11和图13,本实施例中,外门940为对开门形式。这种外门940在打开后,能够减少对外部空间的占用,且便于用户进行开合操作。
71.需要说明的是,本实施例中,外门940与保温外壳900之间可以设置密封条,以保证外门940关闭后,保温外壳900的密闭性。其中,外门940如何通过密封条实现与保温外壳900的密闭连接,可以参照现有技术中的冰箱门,本实施例并未对该部分内容进行改进,故不再展开描述。
72.图6为本实施例提供的自动烹饪设备的食材盒100处于封闭位置时的结构侧视图,图7为本实施例提供的自动烹饪设备的食材盒100处于打开位置时的结构侧视图。请继续参照图1和图2,并结合图6和图7,本实施例中,食材盒100包括外盒110和内盒120,具体地,外盒110与食材架910固定连接,且外盒110具有沿设定方向相对设置的出口111和驱动口112,出口111的朝向与安装口911的朝向相同,内盒120容纳于外盒110,投送装置300穿过驱动口112与内盒120传动连接,用于驱动内盒120沿设定方向移动,其中,内盒120具有食材出口123,在内盒120自出口111伸出的状态下,食材出口123与烹饪区030连通;在内盒120完全容纳于外盒110的状态下,食材出口123封闭;设定方向与上下方向呈角度。
73.当需要对食材盒100中的食材进行烹饪时,投送装置300经驱动口112伸出与内盒120连接,驱动内盒120向出口111运动;当内盒120由出口111伸出后,食材出口123将与烹饪区030连通,从而使内盒120中的食材通过食材出口123掉落至烹饪区030的锅具400中,以利用锅具400达到烹饪食材的目的;当完成食材的投送操作后,投送装置300驱动内盒120向驱动口112的方向运动,使食材出口123封闭。其中,对于单排食材架910的结构,内盒120由单侧的安装口911被推出;对于双排食材架910的结构,由于两排食材架910均设置有内盒120,那么,两排食材架910的内盒120则可以分别由相背设置的安装口911被推出。
74.这种对食材进行投送的方式,仅需要控制内盒120的移动即可达到,结构简单,易于实现。而且,当内盒120完全容纳于外盒110后,自动实现内盒120的封闭,无需额外对内盒120的食材出口123进行封闭操作,设计巧妙。
75.本实施例中,设定方向与上下方向垂直,也就是说,设定方向为水平方向,即:图6和图7中的左右方向。
76.请继续参照图7,本实施例中,内盒120包括盒体121和与盒体121转动连接的盒盖122,具体地,食材出口123设置于盒体121,食材出口123朝下,其中,盒盖122被配置为在内盒120自出口111伸出后,在重力作用下向下转动打开食材出口123,以及在内盒120朝靠近外盒110的方向移动时向上转动封闭食材出口123。
77.这种内盒120的设置形式,在内盒120未被推出之前,由盒盖122对食材出口123进行封闭,使得内盒120中的食材不会受到外部的污染,保证了食材的新鲜。而且,盒盖122在打开后,还能够利用盒盖122朝向食材的一面对食材的下落过程起到一定的导向作用,以使食材顺利地进入烹饪区030。
78.具体地,本实施例中,盒盖122朝向内盒120的盒腔的一面设置有吸湿层。吸湿层的设置,能够吸取内盒120中食材渗出的液汁,从而防止内盒120被推出后其中的液汁飞溅的情形。
79.本实施例中,盒盖122可以为镂空网格状结构,吸湿层可以包括吸湿海绵。
80.请继续参照图3、图6和图7,本实施例中,投送装置300可以包括数量与食材架910排数相同的电动推杆310,即:当食材架910为单排时,电动推杆310的数量为一个;当食材架910为双排时,电动推杆310的数量为两个。其中,在食材架910为双排结构时,两个电动推杆310的输出端相背设置;具体地,电动推杆310的输出端固定连接电磁铁320,电磁铁320被配置为在通电状态下与对应的内盒120磁性连接,以及在断电状态下与对应的内盒120分离。
81.当需要对内盒120中的食材进行烹饪时,电动推杆310伸出,与此同时,设置在电动推杆310输出端的电磁铁320通电,与对应的内盒120磁性连接,从而在电动推杆310逐渐伸出的过程中,打开内盒120的食材出口123;当完成食材的投送操作后,可以再利用电动推杆310将对应的内盒120拉回,使内盒120复位。
82.电动推杆310与内盒120的这种传动连接方式,一方面,保证了电动推杆310与内盒120连接的可靠性,使得内盒120在被推出的过程中,不会与电动推杆310发生分离,而且,还使得内盒120在完成食材的投送操作后能够顺利复位,另一方面,还便于将内盒120从外盒110中取出进行清洗,以及食材的重新补充,从而提高对自动烹饪设备维护的便捷性。
83.需要说明的是,对于双排食材架910的形式,两个电动推杆310分别控制两排食材架910的食材盒的推出和复位,即:一个电动推杆310负责其中一排食材架910的食材盒的推出和复位,另一个电动推杆310负责另一排食材架910的食材盒的推出和复位。至于哪侧的电动推杆310工作,可以由控制模块根据待烹饪菜品所需要的食材,对相应的电动推杆310的控制实现,其中,如何利用控制模块实现对两个电动推杆310的控制,为本领域技术人员可以根据现有技术获得的,这并非本技术的改进点,故不再赘述。
84.请继续参照图6和图7,本实施例中,外盒110通过固定磁铁113吸附固定于食材架910。如此设置,方便将外盒110取下进行清洁维护。
85.请继续参照图1至图3,本实施例中,每排食材架910均包括多个安装口911,各排食材架910的多个安装口911呈行列排布,投送装置300还包括竖直移动机构330和水平移动机构340,其中,竖直移动机构330安装于机架010,水平移动机构340安装于竖直移动机构330的动力输出部,由竖直移动机构330驱动沿竖直方向移动;电动推杆310安装于水平移动机
构340的动力输出部,由水平移动机构340驱动沿水平方向移动。
86.当需要投送指定行列的食材盒100的食材时,可以利用竖直移动机构330驱动水平移动机构340及电动推杆310一起沿竖直方向运动,改变电动推杆310的纵坐标,与此同时,利用水平移动机构340驱动电动推杆310沿水平方向移动,改变电动推杆310的横坐标,从而使电动推杆310运动至指定位置处,与指定位置的食材盒100相对,进而将该食材盒100从与之对应的安装口911推出,以将该食材盒100中的食材投送至烹饪区030。
87.这种设置形式,增加了食材盒100的数量,从而能够增加自动烹饪设备所能够储存的食材的种类,进而增加烹饪获得的菜品品种。
88.请继续参照图3,本实施例中,竖直移动机构330包括投送升降电机331、投送升降同步带332和传动轴333,其中,投送升降同步带332有两条,两条投送升降同步带332沿自动烹饪设备的左右方向间隔排布,每条投送升降同步带332均由相应的同步带轮支撑;投送升降电机331安装于机架010,且投送升降电机331的电机轴与一条投送升降同步带332的上部带轮同轴固定,两条投送升降同步带332的下部带轮通过传动轴333同步转动地设置;水平移动机构340与两侧的投送升降同步带332固定,形成龙门架结构。当投送升降电机331工作时,驱动两侧的投送升降同步带332沿上下方向同步移动,从而带动水平移动机构340连同电动推杆310同步升降,以达到改变电动推杆310纵坐标的目的。
89.水平移动机构340包括投送水平电机341和投送水平同步带342,其中,投送水平电机341安装于投送升降同步带332,投送水平同步带342沿水平方向设置,并通过同步带轮支撑于两侧的投送升降同步带332;投送水平电机341与投送水平同步带342一侧的同步带轮同轴固定;电动推杆310安装于投送水平同步带342。当投送水平电机341工作时,驱动投送水平同步带342沿水平方向移动,从而带动电动推杆310沿水平方向移动,以达到改变电动推杆310横坐标的目的。
90.在其他实施例中,也可以将水平移动机构340安装于机架010,将竖直移动机构330安装于水平移动机构340的动力输出部,由水平移动机构340驱动沿水平方向移动;与此同时,将电动推杆310安装于竖直移动机构330的动力输出部,由竖直移动机构330驱动沿竖直方向移动。该设置同样能够起到改变电动推杆310横、纵坐标的目的,从而实现电动推杆310投送指定位置的食材。其中,该种设置方式与上述将竖直移动机构330安装于机架010、水平移动机构340安装于竖直移动机构330的动力输出部、电动推杆310安装于水平移动机构340的动力输出部的工作原理类似,故不再赘述。
91.本实施例中,多个食材盒100的大小可以相同,可以不同。
92.请继续参照图3、图6和图7,本实施例中,各电动推杆310的外壳安装有信息采集装置350,其中,信息采集装置350被配置为获取对应的食材盒100内部的食材性状特征信息;信息采集装置350与控制模块电连接。
93.在自动烹饪设备工作前,可以先利用竖直移动机构330和水平移动机构340驱动电动推杆310运动,使得信息采集装置350经过各个食材盒100,以获取各排食材架910中每个食材盒100内部的食材性状特征信息,并将该信息传输至控制模块,由控制模块进行记录,以便在用户烹饪所需的菜品时,控制模块能够根据用户输入的指令迅速控制电动推杆310到达装有烹饪该菜品所需的食材的食材盒100的位置处,将该食材盒100中的食材推出。
94.本实施例中,信息采集装置350可以包括摄像头。
95.请继续参照图3,本实施例中,自动烹饪设备还可以包括导料斗700,具体地,导料斗700被配置为将食材盒100送出的食材引导至落料口,以使食材进入处于第一位置的锅具400。
96.通过设置导料斗700,能够实现对由食材盒100送出的食材的导向,使得这部分食材能够顺利地进入烹饪区030的锅具400中,避免食材掉落至设备的周围,造成浪费。
97.本实施例中,食材由食材盒100向烹饪区030运动的轨迹,大致如图10中的虚线箭头所示。
98.请继续参照图2和图4,本实施例中,烹饪炊具500可以包括电磁炉510,具体地,电磁炉510设置于处于第二位置的锅具400的侧向,锅具驱动装置410包括翻转电机411和回转电机412,其中,翻转电机411安装于机架010,翻转电机411的电机轴固定连接回转电机412的外壳,回转电机412的电机轴与锅具400的底部固定连接,翻转电机411被配置为驱动锅具400在第一位置、第二位置和第三位置切换,回转电机412被配置为驱动锅具400自转。
99.当需要利用锅具400承接由食材盒100投送的食材时,可以通过翻转电机411驱动锅具400处于第一位置,此时,锅具400的锅口朝上,与导料斗700的小口端相对;当需要利用电磁炉510对锅具400内的食材进行烹饪时,可以通过翻转电机411驱动锅具400处于第二位置,此时,在图2中视角下,锅具400的锅口朝向右上方,然后,利用回转电机412使锅具400自转,与此同时,开启电磁炉510,在锅具400自转的过程中,利用电磁炉510对锅具400进行全方位的加热,实现对食材的烹饪;当完成食材的烹饪后,可以再次利用翻转电机411驱动锅具400翻转,使锅具400向第三位置运动,随着锅具400自第二位置向第三位置运动的过程中,锅口的开口逐渐向下,从而将锅具400中完成烹饪的菜品倒入储盘区040的盘子050中,达到装盘目的。
100.这种设置形式,不仅能够实现锅具400在第一位置、第二位置和第三位置以及下文中第四位置和第五位置的顺利切换,而且,还能够实现电磁炉510对锅具400内食材的全方位、无死角加热,使得食材受热均匀,从而提升菜品的口感。
101.图14为本实施例提供的自动烹饪设备的锅具与第一锅座卡套420的连接示意图。请继续参照图4,并结合图14,本实施例中,回转电机412的电机轴可以通过第一锅座卡套420与锅具400固定连接,具体地,如图10所示,锅具的底部固定设置有底座430,如图14所示,第一锅座卡套420包括第一固定半环421、第一活动半环422和第一锁扣423,其中,第一固定半环421与回转电机412的电机轴固定连接,第一固定半环421的第一端与第一活动半环422的第一端铰接,第一固定半环421的第二端与第一活动半环422的第二端通过第一锁扣423连接,第一固定半环421和第一活动半环422共同作用以可拆卸地夹持底座430。
102.当需要对锅具400进行更换时,可以解除第一锁扣423对第一固定半环421及第一活动半环422二者的锁定作用,使得第一固定半环421和第一活动半环422二者围成的夹持口可以变大,以解除夹持口对底座430的夹持作用,从而顺利地将锅具400从第一锅座卡套420上取下;当完成对锅具400的更换后,可以再次利用第一锁扣423将第一固定半环421和第一活动半环422锁定在一起,以使二者夹持更换后的锅具400的底座430,进而达到更换锅具400的目的。
103.这种设置形式,便于对锅具400进行更换,从而方便对锅具400进行维护和检修,以及更换不同容积的锅具400。
104.需要说明的是,第一锁扣423的具体结构及其如何实现对第一固定半环421和第一活动半环422二者的锁定,为本领域技术人员可以根据现有技术获得的,本实施例并未对此进行改进,故不再赘述。
105.请继续参照图14,本实施例中,翻转电机411与回转电机412之间还可以设置旋转轴承套413,具体地,旋转轴承套413与翻转电机411的电机轴固定连接,旋转轴承套413与回转电机412之间设置有轴承,轴承的内圈与回转电机412的电机轴固定套装,轴承的外圈与旋转轴承套413固定套装,回转电机412的机壳与旋转轴承套413固定连接。
106.通过该设置,使得翻转电机411工作时,能够通过旋转轴承套413将动力传递至回转电机412以及设置于回转电机412的电机轴的锅具400,同时,回转电机412能够通过轴承的旋转分离作用驱动锅具400自转。
107.请继续参照图2和图4,本实施例中,烹饪炊具500还可以包括空气炸锅盖520,具体地,锅具400还具有锅口朝向空气炸锅盖520的第四位置,其中,空气炸锅盖520可移动地设置于机架010,用于靠近或远离锅具400;空气炸锅盖520与锅具400的锅口配合。
108.当需要利用空气炸锅盖520对锅具400内的食材进行烹饪时,可以先利用翻转电机411驱动锅具400转动至第四位置,使得锅口与空气炸锅盖520相对,然后,使空气炸锅盖520朝着锅具400的方向移动,将锅口盖住;之后,便可启动空气炸锅盖520,实现无油低脂加热食材。
109.如此设置,增加了自动烹饪设备的烹饪种类,使得其能够满足用户的多种烹饪需求。
110.需要说明的是,空气炸锅盖520具有烹饪菜品的功能,也就是说,这一功能集成于空气炸锅盖520的盖体,故,当空气炸锅盖520盖设于锅具400的锅口时,便可通过启动空气炸锅盖520,达到无油低脂加热食材的目的。
111.请继续参照图5,本实施例中,该自动烹饪设备还包括盖体升降电机531、盖体升降滑轨532和盖体固定板533,其中,盖体升降电机531的外壳与机架010相对固定地设置,盖体升降电机531的电机轴同轴固定有丝杆,盖体固定板533通过丝母螺接于丝杆;盖体升降滑轨532固定连接于机架010,盖体固定板533滑动安装于盖体升降滑轨532;空气炸锅盖520固定设置于盖体固定板533。
112.通过开启盖体升降电机531,能够驱动丝杆转动,同时,在盖体固定板533与盖体升降滑轨532的滑动配合作用下,丝杆与丝母之间的螺旋传动转化为盖体固定板533沿盖体升降滑轨532的移动,从而达到空气炸锅盖520靠近或远离锅具400的目的。
113.图15为本实施例提供的自动烹饪设备的空气炸锅盖与第二锅座卡套540的连接示意图。请继续参照图4,并结合图15,在其他实施例中,空气炸锅盖520还可以通过第二锅座卡套540滑动安装于盖体升降滑轨532。具体地,第二锅座卡套540包括第二固定半环541、第二活动半环542和第二锁扣543,其中,第二固定半环541滑动设置于盖体升降导轨532,第二固定半环541的第一端与第二活动半环542的第一端铰接,第二固定半环541的第二端与第二活动半环542的第二端通过第二锁扣543连接,第二固定半环541和第二活动半环542共同作用以可拆卸地夹持空气炸锅盖520。
114.当需要对空气炸锅盖520进行更换时,可以解除第二锁扣543对第二固定半环541及第二活动半环542二者的锁定作用,使得第二固定半环541和第二活动半环542二者围成
的夹持口可以变大,以解除夹持口对空气炸锅盖520的夹持作用,从而顺利地将空气炸锅盖520从第二锅座卡套540上取下;当完成对空气炸锅盖520的更换后,可以再次利用第二锁扣543将第二固定半环541和第二活动半环542锁定在一起,以使二者夹持更换后的空气炸锅盖520,进而达到更换空气炸锅盖520的目的。
115.这种设置形式,便于对空气炸锅盖520进行更换,从而方便对空气炸锅盖520进行维护和检修,以及更换不同功率的空气炸锅盖。
116.需要说明的是,第二锁扣543的具体结构及其如何实现对第二固定半环541和第二活动半环542二者的锁定,为本领域技术人员可以根据现有技术获得的,本实施例并未对此进行改进,故不再赘述。
117.图8为本实施例提供的自动烹饪设备处于储盘区040部分的三维结构示意图一,图9为本实施例提供的自动烹饪设备处于储盘区040部分的三维结构示意图二。如图8和图9所示,本实施例中,储盘区040包括间隔设置的出盘位置和接菜位置,其中,出盘位置开设有出盘口810,出盘口810的下方设置有出盘升降装置820,出盘升降装置820被配置为驱动叠放的盘子050逐一地由出盘口810露出;储盘区040设置有运盘机构830,运盘机构830被配置为将出盘位置的盘子050转运至接菜位置;运盘机构830与控制模块电连接。
118.当需要盛放烹饪完成的菜品时,可以先利用出盘升降装置820使盘子050上升,并使最上端的盘子050完全由出盘口810的顶部所在平面露出,然后,利用运盘机构830将该盘子050转运至接菜位置,以实现对锅具400中菜品的盛接。当需要对下一菜品进行盛放时,可以再次利用出盘升降装置820将下一盘子050由出盘口810送出,并利用运盘机构830将该盘子050转运至接菜位置,以实现对锅具400中下一菜品的盛接。
119.这种设置形式,能够将多个盘子050预先存放至出盘口810的下方,并依次利用这些盘子050实现多个菜品的盛放,无需每次补充空盘,使用方便。
120.请继续参照图8和图9,本实施例中,出盘升降装置820包括出盘升降同步带821和出盘升降电机822,具体地,出盘升降电机822的外壳固定安装于机架010,出盘升降同步带821通过同步带轮支撑于机架010,出盘升降电机822的电机轴与其中一个同步带轮同轴固定地设置,用于驱动出盘升降同步带821沿上下方向移动。其中,出盘升降同步带821固定设置有出盘承托座862,出盘承托座862用于承接叠放的多个空盘。
121.请继续参照图8,本实施例中,运盘机构830包括拨杆831,具体地,拨杆831可转动地设置于机架010,拨杆831为环状结构,环状结构的至少部分环段的内周面与盘子050的外径匹配,拨杆831能够将出盘位置的盘子050拨送至接菜位置。
122.当需要对盘子050进行转运时,如:将出盘位置的盘子050转运至接菜位置,可以先使拨杆831转动至出盘口810,使拨杆831环绕出盘口810;当出盘升降装置820将最上方的盘子050由出盘口810推出后,拨杆831转动,将盘子050拨动至接菜位置。这种运盘机构830的设置形式,结构简单,且能够利用拨杆831的环状结构实现对盘子050的限位,防止盘子050在转运过程中偏离预定轨迹,从而使得盘子050能够顺利到达接菜位置。
123.请继续参照图8,本实施例中,储盘区040还包括存盘位置,具体地,出盘位置、接菜位置和存盘位置依次设置,且运盘机构830还能够将接菜位置的盘子050转运至存盘位置,其中,存盘位置开设有存盘口840,存盘口840的下方设置有存盘升降装置850,存盘升降装置850的升降输出部固定连接有存盘承托座861,存盘承托座861用于承接处于存盘口840的
盘子050。
124.当处于接菜位置的盘子050承接到由锅具400倒入的食材后,在图8的视角下,拨杆831将继续逆时针转动;当拨杆831带动盘子050运动至存盘口840的位置处时,将由存盘口840下方的存盘承托座861进行承托,完成一个菜品的暂存;之后,存盘升降装置850带动存盘承托座861下降,使得装有菜品的盘子050处于存盘口840下方;当自动烹饪设备继续进行下一菜品的烹饪时,出盘升降装置820将下一盘子050举升至出盘口810,拨杆831将该盘子050转运至接菜位置,完成下一菜品的承接,之后,拨杆831将该装有菜品的盘子050转运至存盘口840,使得该盘子050叠放至上一盘子050之上,如此,实现多个菜品在存盘口840处的暂存。
125.通过该设置,使得自动烹饪设备可以将需要烹饪的多个菜品依次做出,用户只需在自动烹饪设备做完全部菜品后,将暂存于存盘口840处的这些菜品一次性取出便可食用,十分便捷。例如:当用户外出未归时,可以通过远程控制该自动烹饪设备启动,并实现多个菜品的烹饪与暂存,从而在用户归家后,便可实现多个菜品的享用,节约时间。
126.需要说明的是,本实施例中,图8中,字母a所在之处表示出盘位置,字母b所在之处表示接菜位置,字母c所在之处表示存盘位置。
127.请继续参照图8和图9,本实施例中,存盘升降装置850包括存盘升降同步带851和存盘升降电机852,具体地,存盘升降电机852的外壳固定安装于机架010,存盘升降同步带851通过同步带轮支撑于机架010,存盘升降电机852的电机轴与其中一个同步带轮同轴固定地设置,用于驱动存盘升降同步带851沿上下方向移动。其中,存盘升降同步带851固定设置有存盘承托座861,存盘承托座861用于承接装有菜品的多个盘子050。
128.本实施例中,存盘升降装置850与出盘升降装置820的结构相同,运动方向相反;盘子050在存盘升降装置850与出盘升降装置820中叠加放置,也可通过若干相应的托盘座放置。
129.具体地,本实施例中,盘子050包括底壁和环绕底壁设置的围壁,其中,围壁不低于盘子050中菜品的高度。如此设置,使得多个盛放有菜品的盘子050叠放暂存于存盘口840处时,盘子050中的菜品不会与上方盘子050的底部接触,避免菜品受到污染。
130.请继续参照图8和图9,本实施例中,储盘区040还设置有洗锅池870,锅具400还具有锅口朝向洗锅池870的第五位置,其中,洗锅池870内设置有喷头,喷头的入口连接有增压水泵880,喷头的出口朝向锅具400;增压水泵880与控制模块电连接。
131.当锅具400将烹饪完成的菜品倒入盘子050中后,翻转电机411将继续驱动锅具400转动,使之处于锅口朝向洗锅池870的第五位置;然后,喷头开启,利用增压水泵880将压力水泵送至锅具400内,与此同时,回转电机412驱动锅具400自转,在锅具400自转的过程中,利用喷头实现对锅具400内壁全方位的清洗。
132.通过上述设置,能够实现锅具400的自动清洗,使得该自动烹饪设备实现从食材添加、烹饪、装盘、洗锅到下一次烹饪的全自动。
133.本实施例中,可以将喷头设置为可自动升降式,使得在洗锅时,喷头可以自动伸入锅具400内部,从而防止喷头喷出的水飞溅至其他位置,并使得洗锅水均能够在自重作用下落入洗锅池870中。
134.需要说明的是,喷头的具体结构及其如何升降至锅具400内部以对锅具400进行清
洁,为本领域技术人员可以根据现有技术获得的,本实施例的重点并非此处,故不再详细赘述。
135.请继续参照图5,本实施例中,调味品加注装置600可以包括多个液体盒610,具体地,液体盒610的底端设置有蠕动泵620,蠕动泵620被配置为将液体盒610内的调味品泵送至锅具400;蠕动泵620与控制模块电连接。
136.该自动烹饪设备在工作时,液体盒610用于盛放调味品。在烹饪菜品时,控制模块根据该菜品所需的调味品种类,控制与相应的蠕动泵620开启,实现该种调味品的添加,在此过程中,也可根据所需添加的调味品量,控制蠕动泵620的开启时间,从而使足量的调味品进入锅具400中。
137.请继续参照图5,本实施例中,液体盒610设置有液位传感器630,液位传感器630被配置为监测液体盒610内部的液体余量,液位传感器630与控制模块电连接。
138.通过在液体盒610设置液位传感器630,能够实现对液体盒610内调味品余量的监测,当调味品余量不足时,将信号实时发送至控制模块,以提示用户及时进行调味品的补充。
139.该自动烹饪设备的工作原理如下。
140.在自动烹饪设备工作前,用户可将若干种类的食材放置在食材盒100的内盒120中,之后,利用竖直移动机构330和水平移动机构340对电动推杆310的驱动,使得电动推杆310上的信息采集装置350能够运动至与各个食材盒100相对的位置处,采集食材盒100内部的食材性状信息,并存储至控制模块中。
141.当需要利用该自动烹饪设备进行自动烹饪时,用户可以向控制模块发送相应的控制指令,选取想要烹饪的菜品,控制模块根据上述对食材性状信息的记录情况,控制电动推杆310移动至烹饪该菜品所需的食材处,该过程中,翻转电机411驱动锅具400运动至第一位置,使锅具400的开口朝上,与导料斗700相对;然后,电动推杆310伸出,电磁铁320通电,通过驱动口112伸入至外盒110内部,与内盒120磁性连接,将内盒120从外盒110的出口111推出;在内盒120被推出后,盒盖122在自重作用下转动打开,使得内盒120中的食材由食材出口123被投送至导料斗700,并进一步进入烹饪区030的锅具400中。
142.如果用户想要烹饪的菜品需要依靠电磁炉510烹饪获得,那么,翻转电机411将驱动锅具400转动至第二位置,利用调味品加注装置600将相应的调味品添加至锅具400中,并使电磁炉510开启,与此同时,利用回转电机412使锅具400转动,使得电磁炉510能够对锅具400进行全方位的均匀加热,从而实现电磁炉510对食材的烹饪;如果用户想要烹饪的菜品需要依靠空气炸锅获得,那么,翻转电机411可以驱动锅具400转动至第四位置,使锅具400的锅口与空气炸锅盖520相对,之后,盖体升降电机531启动,驱动空气炸锅盖520向靠近锅具400的方向移动,将锅口盖住,开启空气炸锅盖520的烹饪功能,从而实现空气炸锅盖520对食材的烹饪。
143.当完成对食材的烹饪时,可以再次启动翻转电机411,使第二位置或第四位置的锅具400转动至第三位置,将菜品倒入接菜位置的盘子050中。其中,当锅具400中的菜品由空气炸锅盖520制作时,则可以先利用盖体升降电机531,使空气炸锅盖520朝向远离锅具400的方向运动,将锅口打开,以顺利实现锅具400向第三位置的转动。在这之前,可以利用控制模块控制拨杆831转动至出盘口810的上方,并启动出盘升降电机822,驱动出盘升降同步带
821向上移动,使位于出盘承托座862的最上方的盘子050由出盘口810伸出,再控制拨杆831反向转动,使其转动至接菜位置,从而使处于第三位置的锅具400能够将烹饪完成的菜品顺利地倒入盘子050中,实现装盘。
144.当完成菜品的装盘后,拨杆831继续转动,将装有菜品的盘子050拨动至存盘位置。在这之前,存盘升降电机852启动,驱动存盘升降同步带851移动,从而使存盘承托座861处于存盘口840的下方。当装有菜品的盘子050被拨动至存盘位置处时,将由存盘口840下方的存盘承托座861进行承托,之后,可以再次利用存盘升降电机852对存盘升降同步带851的驱动,使得存盘承托座861连同其上的盘子050一起下降,以使存盘口840处的盘子050下降至存盘口840下方,从而便于对下一盘子050进行承接。
145.上述过程中,当锅具400将烹饪好的食材倒入接菜位置的盘子050中后,翻转电机411继续驱动锅具400转动,使其处于锅口与洗锅池870正对且相通的第五位置,利用设置于洗锅池870中的喷头对锅具400进行清洁,与此同时,回转电机412启动,驱动锅具400自转,使得喷头能够对锅具400的内壁进行全方位的清洁,保证清洁效果。在此过程中,完成对锅具400清洁的水体将在自重作用下落入洗锅池870,由洗锅池870统一收集、处理。之后,可以再次利用自动烹饪设备进行下一道菜品的制作与装盘,无需人工干预。
146.本实用新型提供的自动烹饪设备,实现了从食材添加、烹饪、装盘、洗锅到下一次烹饪的全自动,可以自动完成一次就餐所需全部菜品的烹饪,自动化程度高,使用方便。
147.虽然本实用新型披露如上,但本实用新型并非限定于此。任何本领域技术人员,在不脱离本实用新型的精神和范围内,均可作各种更动与修改,因此本实用新型的保护范围应当以权利要求所限定的范围为准。
148.最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
149.上述实施例中,诸如“上”、“下”、“左”、“右”等方位的描述,均基于附图所示。
150.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。