1.本发明属于无人机路径规划技术领域,具体地说,是一种基于改进栅格法的无人机巡逻路径规划方法。
背景技术:
2.无人机是利用无线电遥控和自备的程序控制装置操纵的无人飞行设备,涉及传感器技术、通信技术、智能控制技术等,具有技术集成度高、适应性强、智能化等特点。随着卫星定位系统的成熟、大数据分析等信息技术领域以及智能制造技术等方面的迅速发展,无人机行业发展呈厚积薄发趋势。在军用领域,无人机在边境巡逻、战场侦察、信息对抗、军事打击、后勤保障等领域发挥着重要作用。在民用领域,无人机广泛应用于应急救援、气象检测、物流运输、地质勘探、农林植保、电力巡检等领域。根据《中国无人机行业发展趋势研究与未来投资调研报告(2022-2029年)》显示,无人机正进入创新跨越发展的新时期。2021年中国军用无人机市场占额超6成,民用无人机市场规模达869.12亿元,较2020年增加了270.08亿元,同比增长45.09%,已逐渐成为全球无人机行业重要的板块之一。
3.在无人机的相关技术领域,路径规划是一个关键的组成部分。无人机的路径规划研究方向主要集中在性能优化指标,地图模型建立、算法改进与结合、环境维度改变、编队协同策略等方面。路径规划不仅要综合考虑安全性、工作效率、能耗等评价指标,还需考虑执行不同任务的约束条件和性能指标评价权重。在已知或未知的环境中,进行合理的路径规划,从而保证无人机高效安全地完成任务。根据对环境的掌握程度,可以将路径规划划分为两种:静态规划和动态规划。静态规划路径方法是根据已知的环境信息,在全局已知条件下按照一定的约束条件和特定的性能指标规划出优化路径。动态规划路径方法是基于静态规划路径,根据环境变化同时获取未知环境信息和进行快速规划和避障决策。然而,无人机现有路径规划过程虽考虑约束条件限制,但未综合考虑无人机航行探测时变范围限制、在执行过程中会面临任务空间的时变威胁和存在临时变更目标任务的可能。这类任务对实时性要求较高,这对航迹规划过程和获取环境地图信息提出了离线与在线结合、局部与全局并存的要求。
4.环境建模方法的不同直接影响路径规划的精确性和效率,环境模型越精细,规划出的路径就越准确。栅格法构建地图是应用最广泛的一种方法,将路径规划的主体工作区域分解为大小相同的栅格,栅格中储存着二值信息(0或1),分别表示可行区域和不可行区域。栅格的大小和数量决定了构建栅格地图和求解路径时的计算量,因此栅格法可以通过调整其栅格的大小来适应不同的任务要求。现有栅格法较多考虑任务约束条件,如安全风险,较少或未考虑无人机速度变化和易操作性。
技术实现要素:
5.为了克服传统栅格法的信息单一不符合实际和确定性算法的局部最优的缺陷,解决环境信息复杂时变、突发情况应急处理、周期巡逻覆盖和隐患消除跟踪的问题,本发明提
出了一种基于改进栅格法的无人机巡逻路径规划方法,该方法是一种将静态规划与动态规划结合、区域规划与速度规划结合的安全、可靠、有效的多目标路径规划方法。
6.本发明提出了一种基于改进栅格法的无人机巡逻路径规划方法,使用了栅格法、路径规划等技术方法。本发明所描述的方案包括以下三个实体:
7.巡逻区域:任务控制中心指定的无人机执行任务区域,该区域包括地理环境信息、环境基础数据和环境特征数据,该区域内部分区域相对于其他区域具有不同的重要程度;
8.无人机:主要负责巡逻指定区域,执行路径规划周期巡逻任务并反馈任务进度,报告风险隐患并进行警报区域巡逻;
9.任务控制中心:主要负责数据处理、战术选择、任务发布,通过数据分析生成三类区划图,初始化区域与速度分布栅格,优化栅格尺寸设置,制定合适的巡逻战术进行多目标实时动态路径规划,响应无人机风险隐患报告,及时更新调整任务内容,发布重点跟踪任务直至风险隐患消除。
10.本发明采用的具体技术方案如下:
11.一种基于改进栅格法的无人机巡逻路径规划方法,具体包括以下步骤:
12.步骤1:初始化任务控制中心,选择需要无人机探测巡逻的区域,获取环境相关数据进行分析,生成该区域的无人机安全航行风险区划图。
13.步骤1具体实现步骤如下:
14.step1.1任务控制中心确认探测区域,收集该区域的环境基础数据、环境特征数据集和实际检验评估数据集,识别区域环境风险因子;
15.step1.2构建安全航行评估模型与指标体系,综合考虑环境风险因子,根据评估模型设定不同权重值计算环境风险因子的综合风险值,将综合风险值进行分级,设置五种风险等级:低风险、较低风险、中风险、较高风险、高风险并以不同颜色标注;
16.step1.3在下一次巡逻周期开始之前再次收集区域的环境基础数据、环境特征数据集和实际检验评估数据集,数据信息如有更新,执行step1.1,否则继续生成无人机安全航行风险区划图。
17.步骤2:任务控制中心确认巡逻区域内重点区域分布情况数据进行分析和标记,生成该区域的重点区域等级区划图。
18.步骤2具体实现步骤如下:
19.step2.1任务控制中心确认探测区域内的重点区域分布情况,通过先验知识和专家评估,识别重点区域影响因子;
20.step2.2构建重点区域等级评估模型,综合考虑区域与任务执行效能相关度,设定不同权重值根据评估模型计算重点区域影响因子的综合影响值,将综合影响值进行分级,设置四种风险等级:一般重要、比较重要、重要、非常重要,并根据区域等级以不同颜色进行重点标记,设置重要等级相对应的无人机航行速度区间;
21.step2.3在下一次巡逻周期开始之前确认探测区域内的重点区域分布情况,重点区域分布信息如有更新,执行step2.1,否则继续生成重点区域等级区划图;
22.步骤3:任务控制中心根据无人机清晰度计算动态探测范围,生成无人机探测距离区划图。
23.步骤3具体实现步骤如下:
24.step3.1任务控制中心选定执行任务的无人机设备,确认其探测高度范围,构建无人机航行速度与气候天气因素关系模型,确定速度变化区间,构建无人机航行速度和探测范围关系模型,解决不合理速度变化导致图像不清晰探测范围受限、巡逻效能降低和资源浪费的问题;
25.step3.2在无人机航行速度和探测范围关系模型的基础上,识别和引入气候天气、探测时间、设备性能等无人机机载摄像头清晰度影响因子,优化完善无人机实际动态探测范围,不同速度对应不同探测范围;
26.step3.3在下一次巡逻周期开始之前确认环境数据情况,环境数据如有更新,执行step3.1,否则继续生成无人机航行速度与探测距离区划图。
27.步骤4:任务控制中心根据无人机安全航行风险区划图、重点区域等级区划图、无人机航行速度与探测距离区划图,进行区域图综合分析。根据约束条件初始化和优化巡逻区域与速度分布区划图。
28.步骤4具体实现步骤如下:
29.step4.1任务控制中心对三种区划图进行综合分析,对巡逻区域与速度分布栅格尺寸进行初始化;
30.step4.2计算单个栅格内无人机安全风险分布合理值c1,如栅格内无人机安全风险区划情况合理,即单个栅格内无人机安全风险分布均匀,执行下一步,否则执行step1.2,调整风险评估模型的评估函数和指标体系;
31.step4.3计算重点标记区域速度区划合理值c2,如重点标记区域速度区划合理,即重要等级高的区域内无人机速度应该小于重要等级低的区域内无人机速度,执行下一步,否则执行step2.2,调整风险评估模型的评估函数和指标体系;
32.step4.4计算相邻栅格速度变化合理值c3,如相邻栅格的速度变化合理,即不存在相邻栅格速度值相差较大导致操作难度加大的情况,执行下一步,否则执行step3.1,调整无人机航行速度与气候天气因素关系模型,重新确定航行速度的区划分布;
33.step4.5如同时满足合理约束条件,执行step4.7;
34.step4.6根据多次实验分析和专家评估计算三种合理约束条件的权重值,分别为ω1、ω2、ω3,构造优化函数min c=ω1c1 ω2c2 ω3c3,循环迭代,如函数c结果最优执行step4.7,否则继续循环寻找最优值;
35.step4.7确定栅格尺寸,将探测区域等尺寸区划,不同栅格内无人机速度、区域重要程度、无人机航行安全风险均可能不同;
36.step4.8将速度相同的邻近栅格合并,由等尺寸栅格图优化为不等尺寸栅格图,生成优化后的巡逻区域环境信息与速度分布区划图。
37.步骤5:任务控制中心读取巡逻区域环境信息与速度分布区划图,生成战术方案,设置约束条件和优化目标,构造约束条件函数f和优化目标函数g。
38.步骤5具体实现步骤如下:
39.step5.1任务控制中心读取巡逻区域环境信息与速度分布区划图,生成战术方案;
40.step5.2设置约束条件,根据重点区域等级和风险等级分布设置特定搜索路径,计算路径类型数量值f1和相应阈值β1、β2;根据重点区域等级设置访问频率,计算访问频率值f2和相应阈值λ1、λ2;根据重点区域分布设置访问时间间隔,计算访问时间间隔值f3和相应
阈值μ1、μ2;完成巡逻区域全覆盖任务,计算覆盖率值f4和相应阈值构造约束条件函数
41.step5.3设置优化目标,利用无人机巡逻周期时长指标g1、无人机航行安全性指标g2、无人机易操作性指标g3和巡逻路径反侦察性指标g4,设置不同权值:ε1、ε2、ε3、ε4,构造优化目标函数ming=ε1g1 ε2g2 ε3g3 ε4g4。
42.步骤6:任务控制中心发布任务给无人机执行多目标实时动态路径规划,建立周期巡逻效能反馈机制、突发情况应急处理和隐患消除跟踪方案。
43.步骤6具体实现步骤如下:
44.step6.1任务控制中心进行多目标动态路径规划,如函数f条件满足且函数g结果最优,执行下一步,否则循环迭代直至符合要求;
45.step6.2引入环境时变数据,结合步骤一、步骤二和步骤三,实现实时动态路径规划。如函数f条件满足且函数g结果最优,执行下一步,否则循环迭代直至退出;
46.step6.3如无特殊情况发生,执行step6.6,否则执行step6.4;
47.step6.4中断常规巡逻任务,无人机报告风险隐患并重点跟踪反馈特殊情况,如警报消除执行step6.5,否则循环执行直至退出;
48.step6.5临时增加警报区域及周边区域无人机巡逻次数,如隐患结束,执行step6.6,否则执行step6.4;
49.step6.6执行常规巡逻任务,形成周期巡逻效能反馈机制。
50.本发明的有益效果
51.1、立足无人机航行过程的探测范围,根据无人机摄像头清晰度影响因素,结合无人机航行速度和地理气候等环境因素影响,建立无人机探测距离范围区划图,探测结果更符合实际情况,具有较好的工程应用性;
52.2、立足无人机航行过程的安全问题,根据环境信息数据建立航行风险区域规划,为无人机执行任务提供了最基础的安全保障,具有较好的工程实践性和研究真实性;
53.3、立足巡逻区域重点区域分布情况,根据先验知识和专家评估进行重点标记,结合区域重要等级设定不同航行路径、无人机巡逻次数和巡逻时间间隔等,实现巡逻区域全覆盖和重点区域多次访问,更有利于提高巡逻效率并避免资源能耗浪费,优化路径的同时提高巡逻任务的反侦察性;
54.4、综合分析无人机探测距离、重点区域标记、航行风险等因素,确定和优化区域与速度分布栅格尺寸,考虑优化后不等栅格内信息分布合理情况,克服传统栅格法信息单一且过于理想化的缺陷。通过与无人机速度分布规划结合,更有利于强化无人机执行巡逻任务的易操作性;
55.6、传统的静态路径规划方法不能很好地满足复杂环境下的巡逻要求,引入复杂环境因素时变特点,在多目标动态路径规划的基础上优化为实时动态路径规划,将静态规划与动态规划结合,更有利于无人机应对复杂实际情况。建立周期巡逻效能反馈机制、风险警报和隐患跟踪机制,有利于提高无人机路径规划的鲁棒性和健壮性;
56.7、国内己有的无人机任务系统仍难满足电子对抗、预警、侦察等大型任务系统的要求,本发明可适用于民用领域和军用领域,满足大型巡逻任务的需求。
附图说明
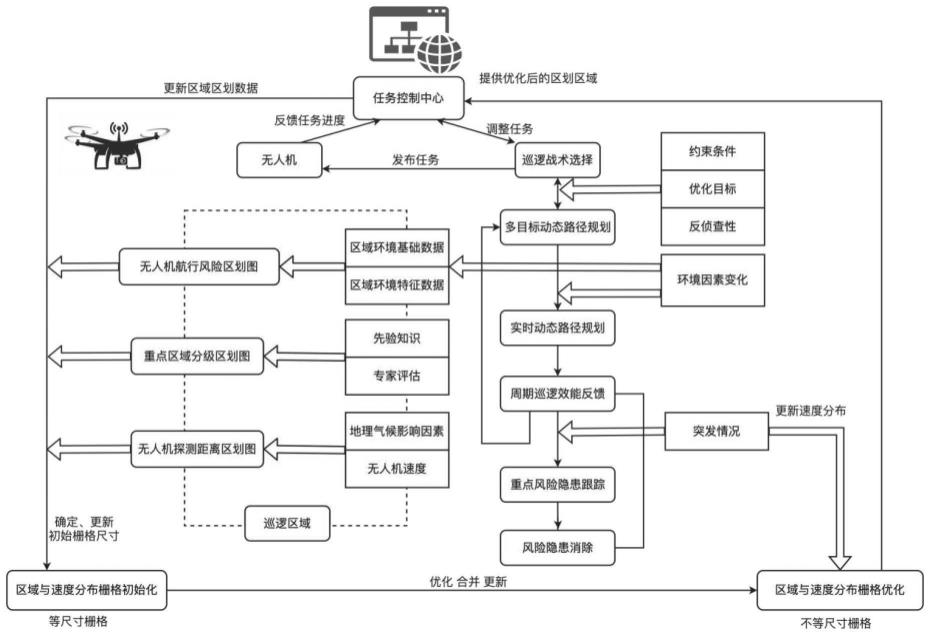
57.图1为本发明系统模型图。
58.图2为本发明中区域环境信息与速度分布区划流程图。
59.图3为本发明中基于改进栅格法的区域环境信息与速度分布区划图。
60.图4为本发明中路径规划方案流程图。
61.图5为本发明中路径规划路线图。
具体实施方式
62.为了加深对本发明的理解,下面将结合附图和实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
63.如图1所示,本发明所描述的方案包括以下三个实体:
64.巡逻区域:任务控制中心指定的无人机执行任务区域,该区域包括地理环境信息、环境基础数据和环境特征数据,该区域内部分区域相对于其他区域具有不同的重要程度;
65.无人机:主要负责巡逻指定区域,执行路径规划周期巡逻任务并反馈任务进度,报告风险隐患并进行警报区域巡逻;
66.任务控制中心:主要负责数据处理、战术选择、任务发布,通过数据分析生成三类区划图,初始化区域与速度分布栅格,优化栅格尺寸设置,制定合适的巡逻战术进行多目标实时动态路径规划,响应无人机风险隐患报告,及时更新调整任务内容,发布重点跟踪任务直至风险隐患消除。
67.实施例:一种基于改进栅格法的无人机巡逻路径规划方法,具体包括以下步骤:
68.步骤1:初始化任务控制中心,设定任务场景为巡逻藏羚羊保护区域,需要无人机探测巡逻的区域为藏羚羊活动保护区域,获取环境相关数据进行分析,生成该区域的无人机安全航行风险区划图,如图2所示。
69.步骤1具体实现步骤如下:
70.step1.1任务控制中心确认探测区域,收集该区域的环境基础数据、环境特征数据集和实际检验评估数据集,识别区域环境风险因子;
71.step1.2构建安全航行评估模型与指标体系,综合考虑环境风险因子,根据评估模型设定不同权重值计算环境风险因子的综合风险值,将综合风险值进行分级,设置五种风险等级:低风险、较低风险、中风险、较高风险、高风险并以不同颜色标注;
72.step1.3在下一次巡逻周期开始之前再次收集区域的环境基础数据、环境特征数据集和实际检验评估数据集,数据信息如有更新,执行step1.1,否则继续生成无人机安全航行风险区划图。
73.步骤2:任务控制中心确认巡逻区域内重点区域分布情况数据进行分析和标记,生成该区域的重点区域等级区划图。
74.步骤2具体实现步骤如下:
75.step2.1任务控制中心确认探测区域内的重点区域分布情况,通过先验知识和专
家评估,草原、荒漠地带等区域藏羚羊出没较多,识别重点区域影响因子;
76.step2.2构建重点区域等级评估模型,综合考虑藏羚羊生活习性和区域内水源食物分布情况判断出没情况,设定不同权重值根据评估模型计算重点区域影响因子的综合影响值,将综合影响值进行分级,设置四种风险等级:一般重要、比较重要、重要、非常重要,并根据区域等级以不同颜色进行重点标记,设置重要等级相对应的无人机航行速度区间;
77.step2.3在下一次巡逻周期开始之前确认探测区域内的重点区域分布情况,重点区域分布信息如有更新,藏羚羊族群发生迁徙,执行step2.1,否则继续生成重点区域等级区划图。
78.步骤3:任务控制中心根据无人机清晰度计算动态探测范围,生成无人机探测距离区划图。
79.步骤3具体实现步骤如下:
80.step3.1任务控制中心选定执行任务的无人机设备,高原环境风速较大、昼夜温差严重影响无人机性能,根据地理信息确认其探测高度范围,构建无人机航行速度与气候天气因素关系模型,确定速度变化区间,构建无人机航行速度和探测范围关系模型,解决不合理速度变化导致图像不清晰探测范围受限、巡逻效能降低和资源浪费的问题;
81.step3.2在无人机航行速度和探测范围关系模型的基础上,识别和引入气候天气、探测时间、设备性能等无人机机载摄像头清晰度影响因子,优化完善无人机实际动态探测范围,不同速度对应不同探测范围;
82.step3.3在下一次巡逻周期开始之前确认环境数据情况,环境数据如有更新,气候变化导致环境变化,执行step3.1,否则继续生成无人机航行速度与探测距离区划图。
83.步骤4:任务控制中心根据无人机安全航行风险区划图、重点区域等级区划图、无人机航行速度与探测距离区划图,进行区域图综合分析。根据约束条件初始化和优化巡逻区域与速度分布区划图。
84.步骤4具体实现步骤如下:
85.step4.1任务控制中心对三种区划图进行综合分析,对巡逻区域与速度分布栅格尺寸进行初始化;
86.step4.2计算单个栅格内无人机安全风险分布合理值c1,如栅格内无人机安全风险区划情况合理,即单个栅格内无人机安全风险分布均匀,执行下一步,否则执行step1.2,调整风险评估模型的评估函数和指标体系;
87.step4.3计算重点标记区域速度区划合理值c2,如重点标记区域速度区划合理,即重要等级高的区域内无人机速度应该小于重要等级低的区域内无人机速度,执行下一步,否则执行step2.2,调整风险评估模型的评估函数和指标体系;
88.step4.4计算相邻栅格速度变化合理值c3,如相邻栅格的速度变化合理,即不存在相邻栅格速度值相差较大导致操作难度加大的情况,执行下一步,否则执行step3.1,调整无人机航行速度与气候天气因素关系模型,重新确定航行速度的区划分布;
89.step4.5如同时满足合理约束条件,执行step4.7;
90.step4.6根据多次实验分析和专家评估计算三种合理约束条件的权重值,分别为ω1、ω2、ω3,构造优化函数min c=ω1c1 ω2c2 ω3c3,循环迭代,如函数c结果最优执行step4.7,否则继续循环寻找最优值;
91.step4.7确定栅格尺寸,将探测区域等尺寸区划,不同栅格内无人机速度、区域重要程度、无人机航行安全风险均可能不同;
92.step4.8将速度相同的邻近栅格合并,由等尺寸栅格图优化为不等尺寸栅格图,生成优化后的巡逻区域环境信息与速度分布区划图,如图3所示。
93.步骤5:任务控制中心读取巡逻区域环境信息与速度分布区划图,生成战术方案,设置约束条件和优化目标,构造约束条件函数f和优化目标函数g。
94.步骤5具体实现步骤如下:
95.step5.1任务控制中心读取巡逻区域环境信息与速度分布区划图,生成战术方案;
96.step5.2设置约束条件,根据藏羚羊出没重点区域等级和风险等级分布设置特定搜索路径,可选用综合平行、8字型等,如图5所示,计算路径类型数量值f1和相应阈值β1、β2;根据重点区域等级设置访问频率,一般重要的区域藏羚羊出没较少在一个周期内至少访问1次,非常重要的区域藏羚羊出没较多在一个周期内至少访问2次,计算访问频率值f2和相应阈值λ1、λ2;根据重点区域分布设置访问时间间隔,在一个周期内,藏羚羊活动范围有限,无人机对这片区域的再次访问应建立于满足时间间隔的基础,计算访问时间间隔值f3和相应阈值μ1、μ2;无人机需要完成藏羚羊活动区域巡逻全覆盖任务,计算覆盖率值f4和相应阈值构造约束条件函数
97.step5.3设置优化目标,利用无人机巡逻周期时长指标g1、无人机航行安全性指标g2、无人机易操作性指标g3和巡逻路径反侦察性指标g4,设置不同权值:ε1、ε2、ε3、ε4,构造优化目标函数ming=ε1g1 ε2g2 ε3g3 ε4g4。路径的转弯次数较少或路径转弯角度较小均有利于提高易操作性,符合实际需求的多种类型特定路径结合,看似随机的搜索路线,有利于提高路径反侦察性。
98.步骤6:任务控制中心发布任务给无人机执行多目标实时动态路径规划,如发生偷猎现象等情况,建立周期巡逻效能反馈机制、突发情况应急处理和隐患消除跟踪方案。
99.步骤6具体实现步骤如下:
100.step6.1任务控制中心进行多目标动态路径规划,如函数f条件满足且函数g结果最优,执行下一步,否则循环迭代直至符合要求;
101.step6.2引入环境时变数据,藏羚羊活动和无人机速度均随着天气情况和昼夜变化而变化,结合步骤一、步骤二和步骤三,实现实时动态路径规划,如函数f条件满足且函数g结果最优,执行下一步,否则循环迭代直至退出;
102.step6.3如无特殊情况发生,如偷猎者出现,执行step6.6,否则执行step6.4;
103.step6.4中断常规巡逻任务,无人机报告风险隐患并重点跟踪反馈偷猎者位置信息并进行驱逐,如警报消除执行step6.5,否则循环执行直至退出;
104.step6.5偷猎者离开后,临时增加警报区域及周边区域无人机巡逻次数,以防偷猎者再次出现,如隐患结束,执行step6.6,否则执行step6.4;
105.step6.6执行常规巡逻任务,形成周期巡逻效能反馈机制。
106.以上所述为本发明的示例性实施例,并非因此限制本发明专利保护范围,凡是利
用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。