1.本实用新型涉及电池技术领域,尤其是涉及一种电池自动装盒机。
背景技术:
2.随着国家对新能源产业的大力支持,电池已广泛应用于各领域。
3.电池生产完需要将电池排列整齐后装入到储存盒内保存,目前一般工厂通过人工的方式对电池进行整理和装盒,这样的装盒工序耗时较长,从而降低了装盒效率。
技术实现要素:
4.为了提高电池装盒效率,本技术提供一种电池自动装盒机。
5.本技术提供的一种电池自动装盒机采用如下的技术方案:
6.一种电池自动装盒机,包括机架、用于装载电池的装载盒、电池输送装置、盒体输送装置和推动组件,所述电池输送装置包括用于输送电池的第一传送带和用于驱动所述第一传送带的第一电机,所述第一传送带水平设置在所述机架上,所述盒体输送装置包括用于传输所述装载盒的第二传送带和用于驱动所述第二传送带的第二电机,所述第二传送带竖直设置在所述机架上,所述第二传送带位于所述第一传送带的一侧,所述第二传送带上连接有限位块,所述装载盒朝向地面的侧壁与所述限位块抵接,所述推动组件包括顶推气缸和推板,所述顶推气缸连接在所述机架上,所述推板连接在所述顶推气缸的活塞杆上,所述推板垂直于所述第一传送带的输送方向与所述第一传送带滑动配合,沿垂直于所述第一传送带的输送方向,所述推板的长度与所述装载盒内侧的长度一致,所述推板与所述装载盒相对设置。
7.通过采用上述技术方案,将电池放置在第一传送带上,第一传送带将电池输送至推板处,将装载盒放置在第二传送带上,通过第二传送带将装载盒移动至合适位置,启动顶推气缸,顶推气缸推动推板,推板将电池抵推至装载盒内,从而完成装载盒内一行电池的排列,然后重复上述步骤,完成对装载盒内电池的装盒,从而提高了电池装盒效率。
8.可选的,所述机架上设置有定位块,所述定位块位于所述第一传送带的出料端,所述定位块朝向所述第一传送带的上料方向的侧壁与所述装载盒远离所述第一传送带的上料方向的内侧壁齐平。
9.通过采用上述技术方案,当第一传送带上的电池移动至与定位块相抵时,远离第一传送带上料端的电池与装载盒远离第一传送带上料端的内侧壁齐平,从而提高了电池装盒的精确度。
10.可选的,所述机架上连接有限位板,所述限位板设置为l形,所述限位板的竖直部位于所述第一传送带的一侧,所述限位板的水平部位于所述第一传送带的上方并与所述第一传送带间隔设置。
11.通过采用上述技术方案,限位板将电池夹在限位板与第一传送带之间,从而提高了电池在第一传送带上排布的整齐度。
12.可选的,所述盒体输送装置还包括第三传送带,所述第三传送带水平设置并位于所述第二传送带的出料端设置,所述机架上连接有导向板,所述导向板位于所述第二传送带与所述第三传送带之间,所述导向板倾斜设置,所述导向板用于将所述装载盒从所述第二传送带引向所述第三传送带。
13.通过采用上述技术方案,装载盒装满电池后离开第二传送带,在导向板的引导下,装载盒平稳移动至第三传送带,从而实现装载盒的出料。
14.可选的,还包括收集装置,所述收集装置包括抓取组件、升降组件和滑移组件,所述滑移组件包括安装座,所述安装座沿水平方向滑动连接在所述机架上,所述安装座的起点位于所述第三传送带的上方,所述升降组件包括升降座,所述升降座沿竖直方向滑动连接在所述安装座上,所述抓取组件连接在所述升降座上,所述抓取组件用于夹持所述装载盒。
15.通过采用上述技术方案,通过升降组件和滑移组件控制升降座移动至装载盒的上方,通过抓取组件劫持装载盒,再通过升降组件和滑移组件控制升降座移动,将装载盒移动至合适堆放的位置,从而便于装载盒的出料。
16.可选的,所述滑移组件包括导向杆、第一齿条和第一齿轮,所述导向杆与所述第一齿条水平设置,所述导向杆与所述第一齿条相互平行设置,所述导向杆与所述第一齿轮固定连接在所述机架上,所述第一齿轮通过连接轴转动连接在所述安装座上,所述安装座上连接有用于驱动所述第一齿轮的第一减速机,所述第一齿轮与所述第一齿条啮合,所述导向杆贯穿所述安装座。
17.通过采用上述技术方案,转动第一齿轮,第一齿轮转动,第一齿轮带动安装座沿第一齿条移动,安装座沿导向杆移动,从而实现安装座和升降座沿水平方向移动。
18.可选的,所述升降组件包括第二齿条和第二齿轮,所述第二齿轮转动连接在所述安装座上,所述安装座上连接有用于驱动所述第二齿轮的第二减速机,所述第二齿条竖直连接在所述升降座上,所述第二齿条贯穿所述安装座并与所述安装座沿竖直方向滑动配合,所述第二齿条与所述第二齿轮啮合。
19.通过采用上述技术方案,转动第二齿轮,第二齿条带动升降座沿竖直方向移动。
20.可选的,所述抓取组件包括抓携气缸,所述抓携气缸至少设置有两个,所述抓携气缸相对设置在所述升降座远离地面的侧壁上的两侧,所述抓携气缸的活塞杆远离所述升降座的轴心设置,所述抓携气缸的活塞杆上连接有用于抓取所述装载盒的抓板。
21.通过采用上述技术方案,启动抓携气缸,抓携气缸驱动抓板,抓板对装载盒进行夹持。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.1. 将电池放置在第一传送带上,第一传送带将电池输送至推板处,将装载盒放置在第二传送带上,通过第二传送带将装载盒移动至合适位置,启动顶推气缸,顶推气缸推动推板,推板将电池抵推至装载盒内,从而完成装载盒内一行电池的排列,然后重复上述步骤,完成对装载盒内电池的装盒,从而提高了电池装盒效率;
24.2. 当第一传送带上的电池移动至与定位块相抵时,远离第一传送带上料端的电池与装载盒远离第一传送带上料端的内侧壁齐平,从而提高了电池装盒的精确度;
25.3. 限位板将电池夹在限位板与第一传送带之间,从而提高了电池在第一传送带
上排布的整齐度。
附图说明
26.图1是用于体现实施例1中一种电池自动装盒机的整体结构示意图;
27.图2是用于体现实施例1中限位块与第二传送带之间位置关系的示意图;
28.图3是用于体现实施例1中第一齿轮和第一齿条之间位置关系的示意图;
29.图4是用于体现实施例1中升降座与抓取气缸之间位置关系的示意图;
30.图5是用于体现实施例2中一种电池自动装盒机的整体结构示意图;
31.图6是用于体现实施例2中导盒板与输送带之间位置关系的示意图;
32.图7是用于体现图6中抵板与挡板之间位置关系的a部放大图。
33.附图标记说明:
34.1、机架;2、装载盒;3、第一传送带;4、第一电机;5、限位板;6、限位条;7、压板;8、第二传送带;9、第二电机;10、限位块;11、定位块;12、顶推气缸;13、推板;14、第三传送带;15、第三电机;16、导向板;17、安装座;18、升降座;19、导向杆;20、第一齿条;21、第一齿轮;22、第一减速机;23、第二齿轮;24、第二齿条;25、第二减速机;26、抓携气缸;27、连接杆;28、拉簧;29、滑杆;30、导向块;31、抓板;32、扣板;33、限位轨道;34、被动齿轮;35、履带;36、联动齿轮;37、输送带;38、导盒板;39、挡板;40、扭簧;41、抵板;42、主动齿轮。
具体实施方式
35.本技术实施例公开一种电池自动装盒机。
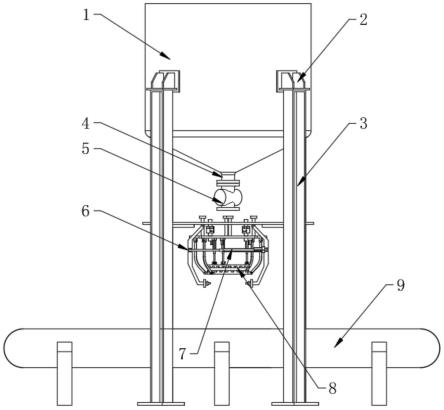
36.实施例1
37.参照图1,一种电池自动装盒机,包括机架1、用于装载电池的装载盒2和电池输送装置。
38.参照图1,电池输送装置包括第一传送带3和用于驱动第一传送带3的第一电机4,第一传送带3和第一电机4均连接在机架1上,第一传送带3的输送方向水平设置,机架1上连接有限位板5,限位板5位于机架1的一侧靠近第一传送带3上料端的一端,限位板5设置为l形,限位板5的竖直部位于第一传送带3的一侧,限位板5的水平部位于第一传送带3的上方并与第一传送带3间隔设置,机架1远离限位板5的一侧靠近第一传送带3上料端的一端连接有限位条6,限位条6与限位板5的水平部之间连接有压板7,压板7水平设置在限位条6的上方。
39.将电池放置在第一传送带3上,电池的轴向与第一传送带3的输送方向相互垂直设置,电池的一端与限位板5的竖直部相抵,另一端与限位条6相抵,电池远离第一传送带3的侧壁与限位板5的水平部相抵,从而便于对电池进行限位,提高电池在第一传送带3上的稳定性。
40.参照图1和图2,机架1上还连接有盒体输送装置,盒体输送装置包括第二传送带8和用于驱动第二送带的第二电机9,第二传送带8的输送方向竖直设置,第二传送带8和第二电机9连接在机架1上,第二传送带8位于第一传送带3连接有限位板5的一侧靠近第一传送带3的出料端的一端,第二传送带8上沿其输送方向连接有多个限位块10,相邻的限位块10之间的间距大于装载盒2沿第二传送带8输送方向上的长度,装载盒2靠近地面的侧壁与限
位块10远离地面的侧壁相抵,机架1上连接有限位轨道33,限位轨道33沿第二传送带8竖直设置在第二传送带8的两侧,限位轨道33的截面设置为l形,限位轨道33的端部远离第二传送带8弯折设置。
41.沿限位轨道33将装载盒2放置在第二传送带8与限位轨道33之间,装载盒2相对的侧壁与限位轨道33的竖直部相抵,装载盒2远离第二传送带8的侧壁与限位轨道33的水平部相抵,从而便于为装载盒2进行导向,减小了装载盒2脱离第二传送带8的可能性。
42.参照图1,机架1上连接有定位块11,定位块11位于第一传送带3的出料端,定位块11朝向第一传送带3的上料方向的侧壁与装载盒2远离第一传送带3的上料方向的内侧壁齐平。
43.参照图1,机架1上连接有推动组件,推动组件包括顶推气缸12和推板13,顶推气缸12连接在机架1上,推板13连接在顶推气缸12的活塞杆上,推板13位于第一传送带3的上方,并垂直于第一传送带3的输送方向与第一传送带3滑动配合,沿垂直于第一传送带3的输送方向,推板13的长度与装载盒2内侧的长度一致,推板13与装载盒2相对设置。
44.当第一传送带3上的电池随第一传送带3移动至,远离第一传送带3上料端的电池与定位块11相抵,然后启动顶推气缸12,推板13朝向第一传送带3移动,推板13将沿水平方向与装载盒2内部长度相适配的数量的电池推至装载盒2内,从而完成装载盒2内一行电池的排列。
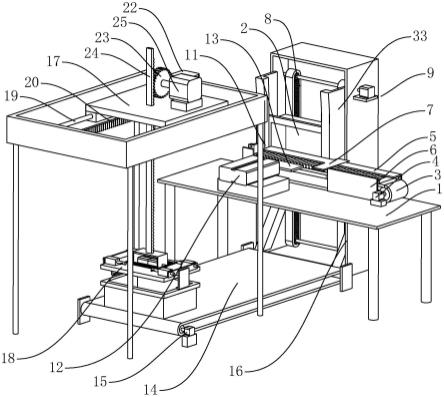
45.参照图1和图2,盒体输送装置还包括第三传送带14和用于驱动第三传送带14的第三电机15,第三电机15连接在机架1上,第三传送带14水平设置并位于第二传送带8的出料端设置,机架1上连接有导向板16,导向板16位于第二传送带8与第三传送带14之间,导向板16倾斜设置,导向板16用于将上述装载盒2从第二传送带8引向第三传送带14。
46.还包括收集装置,收集装置包括抓取组件、升降组件和滑移组件。
47.参照图1和图3,滑移组件包括安装座17,安装座17沿水平方向滑动连接在机架1上,安装座17的起点位于第三传送带14的上方,滑移组件包括导向杆19、第一齿条20和第一齿轮21,导向杆19与第一齿条20沿第三传送带14的输送方向水平设置,导向杆19与第一齿条20相互平行设置,导向杆19与第一齿轮21固定连接在机架1上,安装座17位于第一齿条20的上方,导向杆19贯穿安装座17,安装座17沿导向杆19的长度方向与导向杆19滑动配合,第一齿轮21通过连接轴转动连接在安装座17上,连接轴贯穿安装座17并与安装座17转动连接,第一齿轮21连接在连接轴朝向地面的一端,安装座17上连接有用于驱动第一齿轮21的第一减速机22,第一减速机22的输出轴与连接轴连接,第一齿轮21与第一齿条20啮合。
48.参照图1和图4,升降组件包括升降座18、第二齿条24和第二齿轮23,升降座18沿竖直方向滑动连接在安装座17上并位于安装座17下方,第二齿轮23转动连接在安装座17上,安装座17上连接有用于驱动第二齿轮23的第二减速机25,第二齿条24竖直连接在升降座18上,第二齿条24贯穿安装座17并与安装座17沿竖直方向滑动连接,第二齿条24与第二齿轮23啮合。
49.参照图1和图4,抓取组件包括抓携气缸26,抓携气缸26至少设置有两个,本实施例中抓携气缸26设置有两个,抓携气缸26的一端靠近升降座18的轴心设置,另一端设置为活塞杆,抓携气缸26的活塞杆远离升降座18的轴心设置,抓携气缸26朝向升降座18相对的两侧设置,抓携气缸26的活塞杆上连接有连接杆27,连接杆27的轴向与抓携气缸26的活塞杆
的轴向垂直,两个连接杆27之间连接有拉簧28,连接杆27的端部连接有滑杆29,滑杆29沿抓携气缸26的活塞杆的轴向设置,升降座18上连接有导向块30,滑杆29贯穿导向块30并与导向块30滑动配合,滑杆29穿过导向块30连接有用于抓夹装载盒2的抓板31,抓板31设置为l形,抓板31的竖直部与滑杆29连接,抓板31的水平部朝向升降座18的轴心设置,抓板31的水平部靠近地面设置,抓板31的水平部远离地面的侧壁上远离其竖直部的一端连接有扣板32。
50.通过第一减速机22转动第一齿轮21,第一齿轮21转动,第一齿轮21带动安装座17沿第一齿条20移动,安装座17沿导向杆19移动,将安装座17以及升降座18移动至第三传送带14上的装载盒2上方。
51.然后通过第二减速机25转动第二齿轮23,第二齿条24带动升降座18沿竖直方向移动,使得升降座18朝向装载盒2移动,直至升降座18与装载盒2相抵;再同时启动两个抓携气缸26,抓携气缸26推动连接杆27相互远离,连接杆27推动滑杆29移动,滑杆29沿导向块30移动,滑杆29带动抓板31移动,使得抓板31的水平部相互远离,装载盒2的边缘可以进入抓板31之间,然后驱动抓携气缸26拉动连接杆27相互靠近移动,抓板31的水平部与装载盒2边缘朝向地面的侧壁相抵,从而对装载盒2实现抓取。
52.转动第二齿轮23使得升降座18带动装载盒2远离第三传送带14移动,并转动第一齿轮21控制安装座17带动升降座18移动至合适堆放装载盒2的位置。
53.本技术实施例1的实施原理为:
54.将电池放置在第一传送带3上,启动第一电机4,第一电机4驱动第一传送带3,电池随第一传送带3移动;将装载盒2放置在第二传送带8上,通过第二传送带8将装载盒2移动至合适位置;直至第一传送带3上远离第一传送带3上料方向的电池与定位块11相抵,此时启动顶推气缸12,推板13朝向第一传送带3移动,推板13将电池推入装载盒2,从而完成装载盒2内一行电池的排列,然后重复上述步骤,完成对装载盒2内电池的装盒,从而提高了电池装盒效率。
55.一个装载盒2内装满电池后,装载盒2在第二传送带8的输送下朝向第三传送带14移动,装载盒2沿导向板16移动至第三传送带14,当装载盒2随第三传送带14移动至合适位置后,通过抓取组件、升降组件和滑移组件的配合,将装载盒2抓取并移动至合适位置进行堆放和收集。
56.实施例2
57.参照图5和图6,盒体输送装置还包括第四传送带,第二传送带8包括一组主动齿轮42、一组被动齿轮34和履带35,主动齿轮42和被动齿轮34均转动连接在机架1上,主动齿轮42沿竖直方向位于被动齿轮34上方,履带35套设在主动齿轮42和被动齿轮34上,第二电机9的输出轴与主动齿轮42同轴连接,主动齿轮42为双联齿轮,第四传送带包括输送带37和联动齿轮36,联动齿轮36转动连接在机架1上,并位于主动齿轮42远离第一传送带3的一侧,输送带37套设在联动齿轮36与主动齿轮42上。
58.参照图6,机架1上设置有导盒板38,导盒板38与主动齿轮42相对设置,导盒板38位于输送带37和履带35之间的拐角处,导盒板38设置在弧形,导盒板38的截面设置在l形,导盒板38的水平部远离履带35、输送带37设置。
59.参照图6和图7,压板7上铰接有挡板39,挡板39与压板7之间的铰接轴上套设有扭
簧40,扭簧40的一端与挡板39连接,另一端与压板7连接,压板7上水平连接有抵板41,抵板41位于挡板39远离地面的一侧,并与挡板39远离地面的侧壁相抵。
60.电池在推板13的作用下朝向装载盒2移动,电池沿挡板39朝向地面的侧壁移动,挡板39的设置减小了进入装载盒2后电池之间的相对位移。
61.本技术实施例2的实施原理为:
62.将装载盒2放置在输送带37上,启动第二电机9,第二电机9带动主动齿轮42转动,从而履带35和输送带37同步同向转动,装载盒2朝向第二传送带8移动,装载盒2与导盒板38的水平部相抵,并沿导盒板38移动,并落在第二传送带8上的限位块10上,从而便于装载盒2的上料。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。