1.本实用新型涉及电剪刀技术领域,具体而言,涉及一种电剪刀。
背景技术:
2.电剪刀是以电动机作为动力,驱动剪刀头进行剪切作业的手持式电动工具。
3.目前,大部分电剪刀的剪刀头只能实现固定角度的张开闭合,而不能根据待剪物的尺寸规格进行张开角度大小的改变,使用较为不便。在这些电剪刀中,存在一些电剪刀可实现剪刀头大小口的切换,但可实现剪刀头大小口切换的电剪刀仅具有大口和小口两种剪刀头固定张开角度,其依然无法根据待剪物的尺寸规格灵活地改变张开角度的大小。
技术实现要素:
4.本实用新型解决的问题是:如何提升电剪刀使用的便捷性。
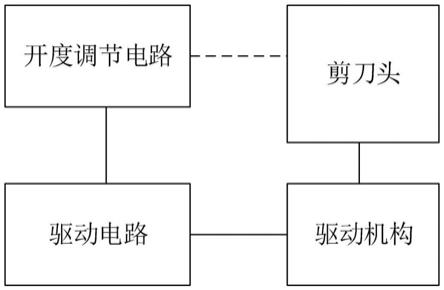
5.为解决上述问题,本实用新型提供一种电剪刀,包括剪刀头以及通讯连接的驱动机构、驱动电路与开度调节电路,所述开度调节电路用于设定所述剪刀头的固定张开角度,所述驱动电路用于通过所述驱动机构驱动所述剪刀头按照所述固定张开角度进行运动。
6.可选地,所述剪刀头包括转动连接的固定刃和可动刃,所述驱动机构包括驱动电机和传动结构,所述驱动电机用于通过所述传动结构驱动所述可动刃相对所述固定刃转动。
7.可选地,所述剪刀头还包括减速结构,所述减速结构用于设置在所述驱动电机与所述传动结构之间和/或设置在所述传动结构与所述可动刃之间。
8.可选地,所述剪刀头还包括第一芯片和第二芯片,所述第一芯片集成有所述开度调节电路,所述第二芯片集成有所述驱动电路;所述开度调节电路和所述驱动电路通过所述第一芯片的相应信号输出引脚与所述第二芯片的相应信号输入引脚连接,所述驱动电路通过所述第二芯片的相应信号输出引脚与所述驱动机构连接。
9.可选地,所述剪刀头还包括用于监测所述剪刀头的张开角度的剪刀头开度监测电路;所述开度调节电路通过所述第一芯片的相应信号输入引脚与所述剪刀头开度监测电路的信号输出端连接,和/或,所述驱动电路通过所述第二芯片的相应信号输入引脚与所述剪刀头开度监测电路的信号输出端连接。
10.可选地,所述剪刀头开度监测电路包括设置在所述剪刀头处的霍尔传感器,所述剪刀头的可动刃上设有与所述霍尔传感器相适配的磁铁。
11.可选地,所述剪刀头还包括用于监测所述驱动机构的驱动电机的转子位置的转子位置监测机构。
12.可选地,所述驱动电机采用无刷直流电机,所述转子位置监测机构包括霍尔传感器、反电动势检测电路和短时脉冲检测电路中的至少一个。
13.可选地,所述剪刀头还包括扳机和用于监测所述扳机开度的扳机开度监测电路;所述开度调节电路通过所述第一芯片的相应信号输入引脚与所述扳机开度监测电路的信
号输出端连接,和/或,所述驱动电路通过所述第二芯片的相应信号输入引脚与所述扳机开度监测电路的信号输出端连接。
14.可选地,所述剪刀头还包括提示机构,所述提示机构的信号输入端与所述第一芯片的相应信号输出引脚连接。
15.本实用新型与现有技术相比,具有以下有益效果:电剪刀通过设置开度调节电路,以实现电剪刀的剪刀头的任意固定张开角度的设定,便于作业人员(用户)根据待剪物的尺寸规格灵活地对剪刀头的固定张开角度进行相应设定,从而提升电剪刀的作业效率,提升电剪刀使用的便捷性。
附图说明
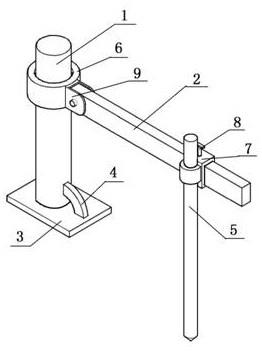
16.图1为本实用新型实施例中电剪刀的结构示意图;
17.图2为本实用新型实施例中电剪刀的部分电路图。
具体实施方式
18.为使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本实用新型的具体实施例做详细的说明。
19.需要说明的是,本实用新型的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本实用新型的实施例能够以除了在这里图示或描述的那些以外的顺序实施。
20.结合图1所示,本实用新型实施例提供一种电剪刀,包括剪刀头以及通讯连接的驱动机构、驱动电路与开度调节电路,开度调节电路用于设定剪刀头的固定张开角度,驱动电路用于通过驱动机构驱动剪刀头按照固定张开角度进行运动。
21.本实施例中,电剪刀包括壳体、设置在壳体端部的剪刀头、设置在壳体内部的驱动机构、驱动电路、开度调节电路与电源等等;其中,剪刀头包括转动连接的固定刃和可动刃,固定刃与壳体固定连接,驱动机构用于驱动可动刃相对固定刃转动,以实现剪刀头的开合。电剪刀的驱动机构、驱动电路与开度调节电路之间通讯连接(有线连接或无线连接),开度调节电路用于设定剪刀头的固定张开角度,以便于电剪刀的剪刀头能够在其开度范围内设定为任一固定张开角度;其中,固定张开角度为电剪刀工作时张开的最大角度。驱动电路则用于根据开度调节电路当前设定的剪刀头的固定张开角度,通过驱动机构来驱动剪刀头按照当前的固定张开角度进行工作(作业、剪切或开合)。
22.现有技术中,电剪刀的固定张开角度无法随意设定,导致其在面对不同尺寸规格的待剪物时容易浪费作业时间,例如,剪刀头的固定张开角度过大时,面对较细的树枝类的待剪物依然需要耗费较多时间。本实施例中的电剪刀通过设置开度调节电路,以实现电剪刀的剪刀头的任意固定张开角度的设定,便于作业人员(用户)根据待剪物的尺寸规格灵活地对剪刀头的固定张开角度进行相应设定,从而提升电剪刀的作业效率,提升电剪刀使用的便捷性。
23.可选地,剪刀头包括转动连接的固定刃和可动刃,驱动机构包括驱动电机和传动结构,驱动电机用于通过传动结构驱动可动刃相对固定刃转动。
24.本实施例中,传动结构包括齿轮传动结构、丝杆传动结构等等,驱动电机通过驱动传动结构来驱动可动刃相对固定刃转动,实现剪刀头的开合。
25.可选地,电剪刀还包括减速结构,减速结构用于设置在驱动电机与传动结构之间和/或设置在传动结构与可动刃之间。
26.本实施例中,通过设置减速机(如行星减速机等),以将驱动电机直接输出的高转速小力矩转化为低转速大力矩,以保证电剪刀的剪切能力与剪切的稳定性。
27.可选地,结合图2所示,电剪刀还包括第一芯片和第二芯片,第一芯片集成有开度调节电路,第二芯片集成有驱动电路;开度调节电路和驱动电路通过第一芯片的相应信号输出引脚与第二芯片的相应信号输入引脚连接,驱动电路通过第二芯片的相应信号输出引脚与驱动机构连接。
28.为便于理解,如图2所示,第一芯片记为u1a,第二芯片记为u1b。
29.本实施例中,为避免相应电路占用电剪刀壳体内部过多体积,优选将电剪刀的大部分逻辑电路集成到第一芯片u1a上;用于设定剪刀头的固定张开角度的开度调节电路集成在第一芯片u1a上,并通过第一芯片u1a的相应引脚与其他相应电路连接,以实现相应的通讯连接。类似地,将用于驱动驱动机构的驱动电路集成到第二芯片u1b上,驱动电路通过第二芯片u1b的相应引脚与驱动电机和其他相应电路连接,以实现相应的通讯连接。
30.而且,开度调节电路和驱动电路通过第一芯片u1a的相应信号输出引脚与第二芯片u1b的相应信号输入引脚实现通讯连接。示例性地,结合图2所示,第一芯片u1a通过信号输出引脚p01、p04、p05、p06、p07、p47分别与第二芯片u1b的信号输入引脚hin1、hin2、hin3、lin1、lin2、lin3连接,以实现开度调节电路与驱动电路的通讯连接,便于驱动电路通过驱动机构驱动剪刀头按照开度调节电路所设定的固定张开角度进行运动。
31.可选地,电剪刀还包括用于监测剪刀头的张开角度的剪刀头开度监测电路;开度调节电路通过第一芯片的相应信号输入引脚与剪刀头开度监测电路的信号输出端连接,和/或,驱动电路通过第二芯片的相应信号输入引脚与剪刀头开度监测电路的信号输出端连接。
32.本实施例中,剪刀头开度监测电路通过相应的监测结构(如传感器等)或电路对剪刀头的张开角度进行监测。且剪刀头开度监测电路与开度调节电路和/或驱动电路通讯连接,一方面,便于电剪刀根据当前的剪刀头的张开角度进行固定张开角度的设定,即开度调节电路将剪刀头开度监测电路当前监测到的剪刀头的张开角度设定为固定张开角度;另一方面,剪刀头开度监测电路用于配合驱动电路,实现驱动电路通过驱动机构驱动剪刀头按照固定张开角度进行运动,示例性地,在剪刀头开度监测电路监测到剪刀头未张开至固定张开角度时,驱动电路通过驱动机构继续驱动剪刀头张开,而在剪刀头开度监测电路监测到剪刀头已经张开至固定张开角度时,驱动电路通过驱动机构停止驱动剪刀头继续张开和/或进行剪刀头闭合的驱动。
33.可选地,剪刀头开度监测电路包括设置在剪刀头处的霍尔传感器,剪刀头的可动刃上设有与霍尔传感器相适配的磁铁。
34.本实施例中,霍尔传感器设置在电剪刀的剪刀头处的壳体上,以保证霍尔传感器设置位置的稳定性。用于与霍尔传感器配合监测剪刀头开度的磁铁则设置在可动刃的尾部(即可动刃未开刃的一端),并与霍尔传感器的位置相对应。如此,通过设置霍尔传感器与磁
铁,以进行剪刀头开度的监测,以及保证监测结果的准确性。
35.可选的,剪刀头开度监测电路的霍尔传感器设有多个。
36.本实施例中,剪刀头开度监测电路通过在剪刀头处设置多个霍尔传感器,多个霍尔传感器在可动刃尾部的运动方向上依次设置,以便于准确监测剪刀头(或可动刃)位于不同开度时的位置;且多个霍尔传感器可实现对可动刃位置的联合监测与印证,进一步提升剪刀头开度监测的准确性。
37.可选地,电剪刀还包括用于监测驱动机构的驱动电机的转子位置的转子位置监测机构。
38.本实施例中,电剪刀通过设置转子位置监测机构,以监测驱动电机的转子位置信息,实现对驱动电机转子转动的圈速的监测,即对驱动电机转子转动圈速进行计数,以用于配合剪刀头开度监测电路,在磁铁每次经过剪刀头开度监测电路的霍尔传感器时进行驱动电机转子转动圈数的相应校准,从而匹配驱动电机转子转动圈速与剪刀头开度,保证电剪刀每次剪切都能回到正确位置上,保证剪刀头开口、闭口位置精度。
39.可选地,驱动电机采用无刷直流电机,转子位置监测机构包括霍尔传感器、反电动势检测电路和短时脉冲检测电路中的至少一个。
40.本实施例中,驱动电机采用无刷直流电机,用于监测无刷直流电机的转子转动圈速的转子位置监测机构包括霍尔传感器、反电动势检测电路和短时脉冲检测电路中的至少一个。
41.在一些实施例中,转子位置监测机构优选采用反电动势检测电路和/或短时脉冲检测电路。具体地,由于使用霍尔传感器的无刷直流电机存在结构复杂、制造难度大、成本高等问题,因此,电剪刀可采用结构简单、制造成本低的无霍尔传感器的无刷直流电机来驱动剪刀头,并通过反电动势检测电路(采用反电动势过零算法)和/或短时脉冲检测电路(采用短时脉冲法)来检测驱动电机的转子位置信息,以降低电剪刀的生产、制造及维护的成本。
42.示例性地,转子位置监测机构采用反电动势检测电路。结合图2所示,反电动势检测电路包括电阻r3、r4、r5、r6、r7、r8以及部分集成在第一芯片u1a内的相应电路。第一芯片u1a设有bemfu、bemfv、bemfw引脚,bemfu、bemfv、bemfw引脚分别通过电阻r3、r4、r5连接驱动电机的u、v、w三相,且电阻r3与bemfu引脚连接的一端通过电阻r6接地,电阻r4与bemfv引脚连接的一端通过电阻r7接地,电阻r5与bemfw引脚连接的一端通过电阻r8接地。
43.可选地,结合图2所示,驱动电路通过第二芯片的相应信号输出引脚(如bost、gh、ghs、gl等引脚)连接相应电路,并通过相应电路连接至驱动电机的u、v、w三相,实现驱动电路对驱动电机的驱动。
44.可选地,电剪刀还包括扳机和用于监测扳机开度的扳机开度监测电路;开度调节电路通过第一芯片的相应信号输入引脚与扳机开度监测电路的信号输出端连接,和/或,驱动电路通过第二芯片的相应信号输入引脚与扳机开度监测电路的信号输出端连接。
45.还包括扳机和用于监测扳机开度的扳机开度监测电路,扳机开度监测电路与开度调节电路和驱动电路通讯连接。
46.本实施例中,若驱动电路通过第二芯片的相应信号输入引脚与扳机开度监测电路的信号输出端连接,即实现扳机开度监测电路与驱动电路的通讯连接,以便于驱动电路根
据扳机开度监测电路所监测到的扳机开度,对驱动电机进行相应驱动,从而便于实现电剪刀的不同工作状态,如剪刀头与扳机的随动等等。在一些实施例中,扳机开度监测电路通过相应的扳机霍尔来监测扳机开度。
47.若开度调节电路通过第一芯片的相应信号输入引脚与扳机开度监测电路的信号输出端连接,即实现扳机开度监测电路与开度调节电路的通讯连接,此时,开度调节电路对剪刀头的固定张开角度的设定,可通过扳机来触发。示例性地,作业人员在电剪刀的剪刀头走到合适的位置长按扳机,剪刀头开度监测电路监测并记录下当前的剪刀头开度,开度调节电路将剪刀头开度监测电路监测并记录的当前的剪刀头开度作为剪刀头的固定张开角度进行设定,电剪刀下次的运行则根据设定的固定张开角度进行。
48.可选地,开度调节电路对剪刀头的固定张开角度的设定,还可通过按键来触发。结合图2所示,按键电路包括按键k1、电阻r1,k1的一端接地,另一端通过r1连接至第一芯片u1a的key引脚。
49.可选地,开度调节电路可设定多个固定张开角度,并通过按住扳机足够长时间或连续按扳机一定次数实现多个固定张开角度的切换。示例性地,电剪刀在未经作业人员进行固定张开角度的设定时,可预设大小口等预设固定张开角度,其作为电剪刀正常模式对应的固定张开角度;若作业人员另设固定张开角度后需回退到正常模式,可通过按住扳机足够长时间或连续按扳机一定次数回退到正常模式。
50.可选地,电剪刀还包括提示机构,提示机构的信号输入端与第一芯片的相应信号输出引脚连接。
51.本实施例中,提示机构用于在开度调节电路成功设定固定张开角度后进行提示。提示机构的信号输入端与第一芯片的相应信号输出引脚连接,实现提示机构与第一芯片中相应电路(如开度调节电路、电剪刀运动状态检测电路等)的通讯连接。提示机构包括蜂鸣器(如图2中的buzzer)、指示灯(如图2中的led1、led2、led3、led4)、显示屏等机构,以在开度调节电路成功设定固定张开角度后进行相应的声或光提示,以向用户提示固定张开角度设定成功。
52.可选地,提示机构还可以用于提示电剪刀的其他状态,如显示电量、提示报警(运行状态异常)等信息。
53.虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本实用新型的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。