1.本发明属于智能交通技术领域,主要涉及了一种基于交通流预测与实际路况的车辆路径规划方法。
背景技术:
2.随着智慧交通系统的快速发展,为解决交通拥堵带来了新转机。智能交通系统通过传感器等可以收集与监测路网的实时路况,再通过路径规划算法,从而为个人出行者提供一条避开拥堵和行驶高效的路径,因此路径规划的研究非常有意义。智能交通系统通过获取的交通流数据,并将各种算法预测出道路未来时刻的交通情况,根据此为用户提供一条最优行驶路线,同时路径行驶过程中,智能交通系统通过获取出行者当前所处的位置及当前时刻城市路网状态,预测得到在进入下一路口时城市路网中道路的拥堵情况,为出行者实时动态规划出行路径,确保在每次规划路径时都选取规划时刻的最优路径。这样可以节约出行者的出行时间,提供给出行者一条全局最优路线,避免了交通拥堵所带来的损失。同时对城市交通来说,基于交通流预测的路径规划减少了拥堵路段车辆的汇入,缓解拥堵路段交通压力,达到合理分配车流,均衡城市道路使用率的目的。
3.如今,面对城市路网的路径规划研究已有大量研究成果,然而还存在以下问题:1)路网信息与信号灯变化没有有效结合;2)现有路径规划算法处理复杂路网时搜索效率较慢;3)路网信息复杂变化,现有算法大多选择固定道路权值忽略了真实路网变化的情况。
技术实现要素:
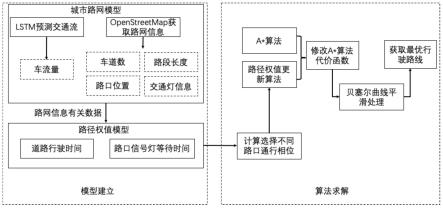
4.本发明正是针对现有技术中存在的问题,提供一种基于交通流预测与实际路况的车辆路径规划方法,首先,获取历史车流量数据,通过预测模型预测车流量信息,再根据城市路网信息构建城市路网模型,得到交通流数据;考虑信号灯的实时变化,与城市路网模型结合构建路径权值模型;根据构建的路径权值模型提出动态更新路径权值算法,并将路径权值更新算法用来改进a*算法的代价函数,规划出一条考虑交通流与实际路况的路线;此外,在路径规划后对路线拐点采用贝塞尔曲线进行平滑处理,获得优化路线。本发明基于交通流与实际路况的实时变化,可输出用时较短路径;考虑动态更新路网信息,提高算法搜索效率与可靠性;考虑路径平滑算法,减少车辆行驶中能量损耗,输出平滑行驶路线。
5.为了实现上述目的,本发明采取的技术方案是:一种基于交通流预测与实际路况的车辆路径规划方法,包括以下步骤:
6.s1,城市路网模型建立:获取历史车流量数据,通过预测模型预测车流量信息,再根据城市路网信息构建城市路网模型,得到路网信息数据;
7.s2,路径权值模型构建:根据步骤s1获得的路网信息数据,获得车流量与道路速度的关系,根据信号灯的相位变化,构建路径权值模型,所述路径权值w
ij
用道路行驶时间t
ij
和路口信号灯等待时间表示,即
8.9.s3,路径权值更新:根据交通流数据、信号灯的相位变化及城市路网信息,获取当前道路车速,计算选择不同路口时的通行相位,计算路口等待时间,更新此路口路径权值矩阵w
ij
;
10.s4,修改代价函数:将步骤s3的路径权值更新算法与a*算法结合,修改代价函数f(j),规划出基于交通流预测与实际路况的规划路线;所述a*算法修改代价函数表示为:
11.f(j)=g(j) h(j)
12.g(j)=g(i) w
ij
[0013][0014]
其中,d
ja
表示路口vj到目标节点va的距离,v
ij
表示路口vi到路口vj的速度,g(j) 表示路口vj到起始节点v1的实际代价,h(j)表示路口vj到目标节点va的估计代价;
[0015]
s5,路径平滑处理:对步骤s4获得的路线拐点采用贝塞尔曲线进行平滑处理,获得优化路线。
[0016]
作为本发明的一种改进,所述步骤s1中,通过openstreetmap获取城市路网信息,所述城市路网信息至少包括路口数、车道数、信号灯数,将城市路网信息抽象为图结构:g=(v,e,m,n),其中v表示顶点的集合,即路口集合;e 表示边的集合,即道路集合,其中e
ij
表示路口vi与vj相连的道路:
[0017]eij
={(vi,vj)|(vi,vj)∈v2,i≠j}
[0018]
m表示邻接矩阵,即为道路的连通性:
[0019][0020]
n表示为车流量特征向量。
[0021]
作为本发明的一种改进,所述步骤s1中,预测车流量信息为用a时间步长的历史数据预测b时间步长的数据:
[0022][0023]
其中,b表示预测时间步长;a为历史时间步长;l(
·
)表示所采取预测模型;表示为第t时间步长道路e
ij
的车流量;n
ij
表示为道路e
ij
的车流量;
[0024]
作为本发明的另一种改进,所述步骤s1中预测车流量信息的预测模型为 lstm神经网络模型。
[0025]
所述模型遗忘门通过sigmoid层来确定删除信息:
[0026]ft
=σ(wf×
[h
t-1
,x
t
] bf)
[0027]
其中,h
t-1
表示前一刻输出,x
t
表示当前的输入;
[0028]
所述模型的输入门有两层,sigmoid层和tanh层用来确定信息的保留i
t
和
[0029]it
=σ(wi×
[h
t-1
,x
t
] bi)
[0030][0031]
完成上述步骤后需要根据c
t-1
的值可确定c
t
的值以此来更新单元格状态:
[0032][0033]
所述输出门中,根据当前状态通过sigmoid层和tanh层控制确定待输出值 o
t
和h
t
:
[0034]ot
=σ(wo×
[h
t-1
,x
t
] bo)
[0035]ht
=o
t
×
tanhc
t
[0036]
其中,wf,wi,wc,wo表示待学习的权重参数;bf,bi,bc,bo表示待学习的偏置值;
[0037]
作为本发明的又一种改进,所述步骤s2中交通流参数与道路速度的关系为:
[0038][0039]
其中,表示道路e
ij
的最大车速;表示道路e
ij
的道路阻塞密度;c
ij
表示道路e
ij
的车道数;l
ij
表示道路e
ij
的路径长度;则道路行使时间t
ij
表示为:
[0040][0041]
作为本发明的更进一步改进,所述步骤s2信号灯的相位变化共有4种,即两个方向的直行和对应的左转,用s
jm
表示到达路口vj时信号灯相位为m,则到达相位判断表示为:
[0042][0043]
其中,m∈[1,4],特别的,当m=4时,p
kj
表示路口vj信号灯的第k个相位时长;表示路口vj信号灯剩余时长:
[0044][0045]
其中,mod表示取余,rj表示为路口vj信号灯周期时长;
[0046]
路口vj处信号灯等待时间表示为:
[0047][0048]
其中,x
mnj
与τ
mnj
分别是两个二进制变量;
[0049][0050][0051]
作为本发明的更进一步改进,所述步骤s5中,用贝塞尔曲线对拐点处进行平滑处理,输出一条较为光滑的行驶路线,具体为:
[0052]
一条n次贝塞尔曲线表达式为:
[0053][0054]
其中,p(u)为贝塞尔曲线的运动控制点;u为曲线内部控制参数;p(i)为位置点,其中p(0)和p(1)分别为初始位置和目标位置;多项式b
i,n
(u)表示为:
[0055][0056]
其中,i=0,1,...,n;将步骤s4获取路线的拐点处定为贝塞尔曲线运动控制点,生成具有行驶曲率的贝塞尔曲线,最终输出一条连续的较为光滑路线。
[0057]
与现有技术相比,本发明具有的有益效果:
[0058]
1)本发明结合信号灯相位变化,构建信号灯模型,将信号灯与路网信息变化有效结合;
[0059]
2)针对路网信息动态变化问题,提出路径权值更新算法,针对交通流的变化动态更新路径权值;
[0060]
3)面对a*算法输出路径拐点问题,提出路径平滑算法,对拐角进行优化。
附图说明
[0061]
图1是本发明基于交通流预测与实际路况的车辆路径规划方法的步骤流程图;
[0062]
图2是本发明实施例1中结合交通流预测所显示不同时间段交通拥堵情况示意图;
[0063]
图3是本发明实施例1中通过lstm预测交通流数据的结果对比图;
[0064]
图4是本发明实施例1中信号灯4种不同相位的示意图;
[0065]
图5是本发明实施例1增加路径平滑后的对比效果图;
[0066]
图6是本发明测试例中传统a*算法路径规划图;
[0067]
图7是本发明测试例中不同时间段一种启发式a*搜索算法路径规划效果图;
[0068]
图8是本发明测试例中不同时间段本发明算法路径规划效果图;
[0069]
图9是本发明测试例中传统a*算法,一种启发式a*算法和本发明所提出算法所显示路径规划距离的结果对比图;
[0070]
图10是本发明测试例中传统a*算法,一种启发式a*算法和本发明所提出算法所显示路径规划用时结果对比图;
[0071]
图11是本发明测试例中传统a*算法,一种启发式a*算法和本发明所提出算法所显示路径规划算法规划时间结果对比图;
[0072]
图12是本发明测试例中传统a*算法,一种启发式a*算法和本发明所提出算法所显示路径规划算法通过红绿灯数目结果对比图。
具体实施方式
[0073]
下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。
[0074]
实施例1
[0075]
一种基于交通流预测与实际路况的车辆路径规划方法,如图1所示,包括以下步
骤:
[0076]
s1,城市路网模型建立:获取历史车流量数据,通过预测模型预测车流量信息,再根据城市路网信息构建城市路网模型,得到路网信息有关数据;
[0077]
通过openstreetmap获取城市路网信息,所述城市路网信息至少包括路口位置、车道数、路段长度、交通灯信息,将城市路网信息抽象为图结构:g= (v,e,m,n),其中v表示顶点的集合,即路口集合;e表示边的集合,即道路集合,其中e
ij
表示路口vi与vj相连的道路:
[0078]eij
={(vi,vj)|(vi,vj)∈v2,i≠j}
ꢀꢀꢀ
(1)
[0079]
m表示邻接矩阵,即为道路的连通性:
[0080][0081]
n表示为车流量特征向量;
[0082]
交通流预测描述为:用a时间步长的历史数据预测b时间步长的数据:
[0083][0084]
其中,b表示预测时间步长;a为历史时间步长;l(
·
)表示所采取预测模型;表示为第t时间步长道路e
ij
的车流量;n
ij
表示为道路e
ij
的车流量。
[0085]
本发明所采取预测模型为lstm神经网络模型,首先lstm遗忘门通过 sigmoid层来确定删除信息:
[0086]ft
=σ(wf×
[h
t-1
,x
t
] bf)
ꢀꢀꢀ
(4)
[0087]
其中,h
t-1
表示前一刻输出,x
t
表示当前的输入;
[0088]
所述模型的输入门有两层,sigmoid层和tanh层用来确定信息的保留i
t
和
[0089]it
=σ(wi×
[h
t-1
,x
t
] bi)
ꢀꢀꢀ
(5)
[0090][0091]
完成上述步骤后需要根据c
t-1
的值可确定c
t
的值以此来更新单元格状态:
[0092][0093]
输出门中,根据当前状态通过sigmoid层和tanh层控制确定待输出值o
t
和 h
t
:
[0094]ot
=σ(wo×
[h
t-1
,x
t
] bo)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0095]ht
=o
t
×
tanhc
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0096]
其中,wf,wi,wc,wo表示待学习的权重参数;bf,bi,bc,bo表示待学习的偏置值;
[0097]
本实施例的步骤s1以东南大学四牌楼校区附近路况进行预测,如图2所示,图2显示了3个时间段的道路交通情况,图中黑色连续标记处为拥堵路段。利用本实施例的lstm预测此处交通流数据,对比结果图如图3所示,图中可以看出,通过搭建lstm模型对交通流进行预测,预测结果与真实结果较为吻合。
[0098]
s2,路径权值模型构建:将预测车流量信息与路网信息结合,构建路径权值数学模型。
[0099]
首先,根据步骤s1中获取交通流数据,利用统计分析模型(greenberg对数模型)可以表示交通流参数与道路速度之间的关系:
[0100][0101]
其中,v
ij
(km/h)表示道路e
ij
的车道速度,表示表示道路e
ij
的道路最大车速,表示表示道路e
ij
的道路阻塞密度,k
ij
(pcu/h) 表示道路e
ij
的道路密度,可以表示为:
[0102][0103]
其中,n
ij
表示表示道路e
ij
的车流量,c
ij
表示道路e
ij
的车道数,l
ij
表示道路e
ij
的路径长度,将(11)代入(10)可以表示车流量与车道速度之间的关系:
[0104][0105]
则道路e
ij
的道路行驶时间可以表示为:
[0106][0107]
再者,对于红绿灯相位判断:如图4所示,红绿灯路口有4个相位,分别是两个方向的直行和对应的左转,针对上述四种情况,用s
jm
表示到达路口vj时信号灯相位为m;到达相位判断表示为:
[0108][0109]
其中,m∈[1,4],特别的,当m=4时,p
kj
表示路口vj信号灯的第k个相位时长,表示路口vj信号灯剩余时长用公式(15)表示,其中mod 表示取余,rj表示为路口vj信号灯周期时长:
[0110][0111]
则路口vj处信号灯等待时间可以表示为:
[0112][0113]
其中,x
mnj
与τ
mnj
分别是两个二进制变量用(17)和(18)表示。
[0114]
[0115][0116]
路径行驶时间包括:道路行驶时间与路口信号灯等待时间,本发明中路径权值用路径行驶时间表示:
[0117][0118]
s3,路径权值更新:根据交通流数据、信号灯的相位变化及城市路网信息,获取当前道路车速,计算选择不同路口时的通行相位,计算路口等待时间,更新此路口路径权值矩阵;该步骤具体包括:
[0119]
s31:预测步长的选择关系到预测与路径规划的准确性,结合步骤s1的预测结果,本实施例对预测步长的取值为5min,即:b=5min。
[0120]
s32:使用lstm模型对其车流量进行预测,结合公式(12)获取当前道路车速v
ij
;
[0121]
s33:当到达路口vj时,确定与该路口相邻的所有路口集合 {v
j1
,v
j2
,...,v
jn
},计算选择不同相邻路口时的通行相位τ
mnj
;
[0122]
s34:由于不同相位选择,τ
mnj
不同从而导致路口等待时间不同,根据公式(16)计算步骤s33中选择不同相位后的路口等待时间;
[0123]
s35:结合公式(19)将选择不同相位后的路径权值存储在此路口路径权值矩阵。
[0124]
s4,修改代价函数:将步骤s3的路径权值更新算法与a*算法结合,修改代价函数f(j),规划出基于交通流预测与实际路况的实时路线;所述步骤具体包括:
[0125]
s41:初始化路网信息g=(v,e,m,n),获取当前车辆所处道路e
ij
;
[0126]
s42:a*算法修改代价函数表示为:
[0127]
f(j)=g(j) h(j)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)
[0128]
g(j)=g(i) w
ij
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0129][0130]
其中,g(j)表示路口vj到起始节点v1的实际代价,h(j)表示路口vj到目标节点va的估计代价;d
ja
表示路口vj到目标节点va的距离,距离选用曼哈顿距离公式,则路口vj到目标节点va的曼哈顿距离如(23)所示:
[0131]dja
=|a.x-j.x| |a.y-j.y|
ꢀꢀꢀ
(23)
[0132]
其中,(a.x,a.y)表示目标节点va的x和y坐标,(j.x,j.y)表示目标节点vj的 x和y坐标;
[0133]
s43:从起始点开始行驶到下一节点时根据路径权值更新算法更新该路口路径权值矩阵;
[0134]
s44:用改进的a*算法进行搜寻选择用时最小的路径权值并确定下一行驶路口;
[0135]
s45:遍历所有节点,直至搜寻目标节点,此时输出一条用时较短路径。
[0136]
s5,路径平滑处理:由于地图栅格化影响,路径栅格化产生拐点,因而对步骤s4获得的路线拐点采用贝塞尔曲线进行平滑,贝塞尔曲线平滑算法表示如下:
[0137]
一条n次贝塞尔曲线表达式为:
[0138][0139]
其中,p(u)为贝塞尔曲线的运动控制点;u为曲线内部控制参数;p(i)为位置点,其中,p(0)和p(1)分别为初始位置和目标位置;多项式b
i,n
(u)表示为:
[0140][0141]
其中,i=0,1,...,n;将步骤s4获取路线的拐点处定为贝塞尔曲线运动控制点,结合公式(24),生成具有行驶曲率的贝塞尔曲线,最终输出一条连续的较为光滑路线。
[0142]
选用贝塞尔曲线对拐点处进行平滑处理,输出一条较为光滑的行驶路线,如图5所示,图5中可以看出,相对于步骤s4获取的路线,对拐点进行优化,输出路线较为光滑,至此,路径规划完成。
[0143]
测试例
[0144]
本测试例分别用传统a*算法,一种启发式a*算法和本发明所提出算法去规划路径,其中传统a*算法仅考虑起始节点到搜索节点的距离以及目标节点到搜索节点的距离,并没有考虑实时路况信息,所输出路线不受车流量与信号灯变化的影响,如图6所示;而一种启发式a*算法在此基础上加入路口拥堵情况,将路口拥堵情况分为4级加入代价函数中,但并不能实时反应路况信息与信号灯变化情况,所输出路线会根据不同时间段历史车流量数据变化而变化,如图7所示;本发明所提出的算法考虑对交通流的预测以及信号灯实时变化,对a*算法代价函数进行改进,所输出路线会考虑不同时间段的车流量情况以及信号灯的等待时间,如图8所示。
[0145]
我们对不同算法的路径规划参数进行了对比,图9是本测试例中,利用传统a*算法,一种启发式a*算法和本发明所提出算法所显示路径规划距离结果对比图,由于启发式a*算法考虑交通拥堵情况,但是仅考虑历史交通流信息,并没有考虑交通流实时变化,在距离上可能会比本算法距离较短,但是结合图 10可以看出出行效率上较低。
[0146]
图10是本发明测试例中,利用传统a*算法,一种启发式a*算法和本发明所提出算法所显示路径规划用时结果对比图,由于所对比两种算法均未考虑信号灯的变化情况,传统a*算法仅考虑距离最短,在与启发式算法对比上用时较长,而对于本发明所提供的算法考虑路网信息动态变化,尽管在路径距离较长的情况下路径行驶时间也较短,由此可见本发明在针对复杂多变路况情况下可以提出一条用时较短路线。
[0147]
图11是本发明测试例中,利用传统a*算法,一种启发式a*算法和本发明所提出算法所显示路径规划算法规划时间结果对比图,由于本算法结合动态路径权值更新算法,考虑道路信息变化对路径规划运行时间所产生的影响,在算法规划时间上用时相比于对比算法较短。
[0148]
图12本发明测试例中,利用传统a*算法,一种启发式a*算法和本发明所提出算法所显示路径规划算法通过红绿灯数目结果对比图,本发明考虑路口信号灯的等待时间,构建路径权值数学模型,相对于其余两种算法,本算法在不同时间段所经过的红绿灯数目都较少。
[0149]
综上,本发明方法使用lstm结合历史数据预测车流量,openstreetmap 获取城市
路网信息,两者结合构成城市路网模型;考虑信号灯的实时变化,与路网模型结合构建路径权值数学模型;根据构建的路径权值数学模型提出动态更新路径权值算法,以此来解决路网信息动态变化的问题;将路径权值更新算法用来改进a*算法的代价函数,规划出一条考虑交通流与实际路况的路线;由于a*算法将地图栅格化,输出路线会存在拐点,为使车辆平稳前行,提升用户舒适度,在路径规划后对输出路线进行平滑处理。本发明结合信号灯与交通流的实时变化,可输出用时较短路径,提升出行效率;考虑动态更新路网信息,提高算法搜索效率与可靠性;考虑路径平滑算法,提升用户舒适度,输出平滑行驶路线。
[0150]
需要说明的是,以上内容仅仅说明了本发明的技术思想,不能以此限定本发明的保护范围,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰均落入本发明权利要求书的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。