技术特征:
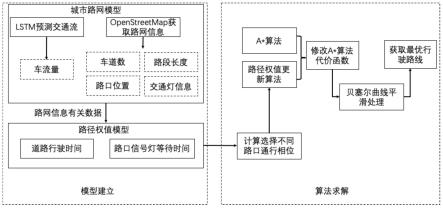
1.一种基于交通流预测与实际路况的车辆路径规划方法,其特征在于,包括以下步骤:s1,城市路网模型建立:获取历史车流量数据,通过lstm模型预测车流量信息,再根据城市路网信息构建城市路网模型,得到路网信息数据;s2,路径权值模型构建:根据步骤s1获得的路网信息数据,获得车流量与道路行驶时间的关系,根据信号灯的相位变化,构建路径权值模型,所述路径权值w
ij
以道路行驶时间t
ij
和路口信号灯等待时间来表示,即s3,路径权值更新:根据交通流数据、信号灯的相位变化及城市路网信息,获取当前道路车速,计算选择不同路口时的通行相位,计算路口等待时间,更新此路口路径权值矩阵w
ij
;s4,修改代价函数:将步骤s3的路径权值更新算法与a*算法结合,修改路口v
j
处的代价函数f(j),得到基于交通流预测与实际路况的规划路线;所述a*算法修改代价函数表示为:f(j)=g(j) h(j)g(j)=g(i) w
ij
其中,d
ja
表示路口v
j
到目标节点v
a
的距离,v
ij
表示路口v
i
到路口v
j
的速度,g(j)表示路口v
j
到起始点的实际代价,h(j)表示路口v
j
到目标点的估计代价;s5,路径平滑处理:对步骤s4获得的路线拐点采用贝塞尔曲线进行平滑处理,获得优化路线。2.如权利要求1所述的一种基于交通流预测与实际路况的车辆路径规划信息,方法,其特征在于:所述步骤s1中,通过openstreetmap获取城市路网信息,所述城市路网信息至少包括路口位置、车道数、路段长度、交通灯信息,将城市路网信息抽象为图结构:g=(v,e,m,n),其中v表示顶点的集合,即路口集合;e表示边的集合,即道路集合,其中e
ij
表示路口v
j
与v
j
相连的道路:e
ij
={(v
i
,v
j
)|(v
i
,v
j
)∈v2,i≠j}m表示邻接矩阵,即为道路的连通性:n表示为车流量特征向量。3.如权利要求2所述一种基于交通流预测与实际路况的车辆路径规划方法,其特征在于:所述步骤s1中,预测车流量信息为用a时间步长的历史数据预测b时间步长的数据:其中,b表示预测时间步长;a为历史时间步长;l(
·
)表示所采取的预测模型;表示为第t时间步长道路e
ij
的车流量;n
ij
表示为道路e
ij
的车流量。4.如权利要求2或3所述一种基于交通流预测与实际路况的车辆路径规划方法,其特征
在于:所述步骤s1中预测车流量信息的预测模型为lstm神经网络模型。所述模型遗忘门通过sigmoid层来确定删除信息f
t
:f
t
=σ(w
f
×
[h
t-1
,x
t
] b
f
)其中,h
t-1
表示前一刻输出,x
t
表示当前的输入;所述模型的输入门有两层,sigmoid层和tanh层用来确定信息的保留i
t
和i
t
=σ(w
i
×
[h
t-1
,x
t
] b
i
)完成上述步骤后需要根据c
t-1
的值可确定c
t
的值以此来更新单元格状态:所述模型输出门中,根据当前状态通过sigmoid层和tanh层控制确定待输出值o
t
和h
t
:o
t
=σ(w
o
×
[h
t-1
,x
t
] b
o
)h
t
=o
t
×
tanhc
t
其中,w
f
,w
i
,w
c
,w
o
表示待学习的权重参数;b
f
,b
i
,b
c
,b
o
表示待学习的偏置值。5.如权利要求4所述一种基于交通流预测与实际路况的车辆路径规划方法,其特征在于:所述步骤s2中交通流参数与道路速度的关系为:其中,表示表示道路e
ij
的最大车速,表示表示道路e
ij
的道路阻塞密度;n
ij
表示道路e
ij
的车流量,c
ij
表示道路e
ij
的车道数,l
ij
表示道路e
ij
的路径长度;则道路e
ij
行驶时间表示为:6.如权利要求5所述一种基于交通流预测与实际路况的车辆路径规划方法,其特征在于:所述步骤s2信号灯的相位变化共有4种,即两个方向的直行和对应的左转,用s
jm
表示到达路口v
j
时信号灯相位为m,则到达相位判断表示为:其中,m∈[1,4],特别的,当m=4时,p
kj
表示路口v
j
信号灯的第k个相位时长;表示路口v
j
信号灯剩余时长用:其中,mod表示取余,r
j
表示为路口v
j
信号灯周期时长;路口v
j
处信号灯等待时间表示为:
其中,x
mnj
与τ
mnj
分别是两个二进制变量;分别是两个二进制变量;7.如权利要求6所述一种基于交通流预测与实际路况的车辆路径规划方法,其特征在于:所述步骤s5中,用贝塞尔曲线对拐点处进行平滑处理,输出一条较为光滑的行驶路线,具体为:一条n次贝塞尔曲线表达式为:其中,p(u)为贝塞尔曲线的运动控制点;u为曲线内部控制参数;p(i)为位置点,其中p(0)和p(1)分别为初始位置和目标位置;多项式b
i,n
(u)表示为:其中,i=0,1,...,n。将步骤s4获取路线的拐点处定为贝塞尔曲线运动控制点,生成具有行驶曲率的贝塞尔曲线,最终输出一条连续的较为光滑路线。
技术总结
本发明公开了一种基于交通流预测与实际路况的车辆路径规划方法,首先,获取历史车流量数据,通过预测模型预测车流量信息,再根据城市路网信息构建城市路网模型,得到交通流数据;考虑信号灯的实时变化,与城市路网模型结合构建路径权值模型;根据构建的路径权值模型提出动态更新路径权值算法,并将路径权值更新算法用来改进A*算法的代价函数,规划出一条考虑交通流与实际路况的路线;此外,在路径规划后对路线拐点采用贝塞尔曲线进行平滑处理,获得优化路线。本发明基于交通流与实际路况的实时变化,可输出用时较短路径;考虑动态更新路网信息,提高算法搜索效率与可靠性;考虑路径平滑算法,减少车辆行驶中能量损耗,输出平滑行驶路线。行驶路线。行驶路线。
技术研发人员:莫磊 赵一鸣 张新宇
受保护的技术使用者:东南大学
技术研发日:2022.10.19
技术公布日:2023/2/23
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。