提示控制装置以及提示控制程序
1.相关申请的交叉引用
2.本技术基于在2020年4月1日在日本技术的专利申请第2020-66153号、以及在2021年2月24日在日本技术的专利申请第2021-27773号,并通过参照整体引用基础申请的内容。
技术领域
3.本说明书的公开涉及控制朝向车辆的驾驶员的信息的提示的提示控制装置以及提示控制程序。
背景技术:
4.专利文献1所公开的车辆控制装置具备判定产生拥堵的拥堵判定部、以及在拥堵产生区间的长度在规定值以上的情况下使自动驾驶开始的自动驾驶开始判定部。
5.专利文献1:日本特开2005-324661号公报
6.如专利文献1那样,研究在车辆通过自动驾驶功能自动行驶的期间,许可面向驾驶员的内容等的提供。但是,若驾驶员的注意朝向内容等,则也容易产生驾驶员感到不安的场景。例如,在拥堵中行驶的情况下,较多地产生其它车辆的插入。若在基于自动驾驶功能的行驶中产生这样的拥堵中的其它车辆的插入,则可能成为驾驶员的不安的重要因素。
技术实现要素:
7.本公开的目的在于提供在通过自动驾驶功能在拥堵中行驶时,不容易给予驾驶员不安的提示控制装置以及提示控制程序。
8.为了实现上述目的,公开的一个方式是提示控制装置,在具备自动驾驶功能的车辆中使用,并且控制朝向车辆的驾驶员的信息的提示,该提示控制装置具备:拥堵判定部,在车辆通过自动驾驶功能进行行驶的自动行驶期间,判定是否在拥堵中;插入预测部,在由拥堵判定部判定为在拥堵中的情况下,探测与作为车辆的本车相邻的相邻车的插入的实施预兆;以及提供限制部,在由插入预测部探测到相邻车的插入的实施预兆的情况下,限制在自动行驶期间提供的内容的显示。
9.另外公开的一个方式是提示控制程序,在具备自动驾驶功能的车辆中使用,并且控制朝向车辆的驾驶员的信息的提示,该提示控制程序使至少一个处理部执行处理,该处理包括:在车辆通过自动驾驶功能进行行驶的自动行驶期间,判定是否在拥堵中;在判定为在拥堵中的情况下,探测与作为车辆的本车相邻的相邻车的插入的实施预兆;以及在由插入预测部探测到相邻车的插入的实施预兆的情况下,限制在自动行驶期间提供的内容的显示。
10.在这些方式中,在通过自动驾驶功能在拥堵中行驶时,若探测到相邻车的插入的实施预兆,则限制提供给驾驶员的内容的显示。因此,能够通过在提供中的内容中产生的显示变化,向驾驶员通知相邻车的插入产生的预测。根据这样的通知,在通过自动驾驶功能在
拥堵中行驶时,不容易给予驾驶员不安。
11.另外公开的一个方式是提示控制装置,在具备自动驾驶功能的车辆中使用,并且控制朝向车辆的驾驶员的信息的提示,该提示控制装置具备:拥堵判定部,在车辆通过自动驾驶功能进行行驶的自动行驶期间,判定是否在特定模式的拥堵中,该特定模式被设定为容易产生与作为车辆的本车相邻的相邻车的插入;以及提供限制部,在由拥堵判定部判定为在特定模式的拥堵中的情况下,增强在自动行驶期间提供的内容的显示的限制。
12.另外公开的一个方式是提示控制程序,在具备自动驾驶功能的车辆中使用,并且控制朝向车辆的驾驶员的信息的提示,该提示控制程序使至少一个处理部执行处理,该处理包括:在车辆通过自动驾驶功能进行行驶的自动行驶期间,判定是否在特定模式的拥堵中,该特定模式被设定为容易产生与作为车辆的本车相邻的相邻车的插入;以及在判定为在特定模式的拥堵中的情况下,增强在自动行驶期间提供的内容的显示的限制。
13.在这些方式中,在通过自动驾驶功能在拥堵中行驶时,若判定为是容易产生相邻车的插入的特定模式的拥堵,则限制提供给驾驶员的内容的显示。因此,能够通过在提供中的内容中产生的显示变化,向驾驶员通知相邻车的插入产生的可能性。根据这样的通知,在通过自动驾驶功能在拥堵中行驶时,不容易给予驾驶员不安。
14.另外公开的一个方式是提示控制装置,在具备自动驾驶功能的车辆中使用,并且控制朝向车辆的驾驶员的信息的提示,该提示控制装置具备:后方掌握部,掌握在作为车辆的本车的后方行驶的后方车的存在;拥堵判定部,在车辆通过自动驾驶功能进行行驶的自动行驶期间,判定是否在拥堵中;以及提供限制部,根据在拥堵中由后方掌握部掌握的后方车的状况,限制在自动行驶期间提供的内容的显示。
15.另外公开的一个方式是提示控制程序,在具备自动驾驶功能的车辆中使用,并且控制朝向车辆的驾驶员的信息的提示,该提示控制程序使至少一个处理部执行处理,该处理包括:掌握在作为车辆的本车的后方行驶的后方车的存在;在车辆通过自动驾驶功能进行行驶的自动行驶期间,判定是否在拥堵中;以及根据在拥堵中掌握的后方车的状况,限制在自动行驶期间提供的内容的显示。
16.在这些方式中,在通过自动驾驶功能在拥堵中行驶时,根据在本车的后方行驶的后方车的状况,限制在自动行驶期间提供的内容的显示。因此,能够通过在提供中的内容中产生的显示变化向驾驶员通知来自后方的追尾的风险。根据这样的通知,在通过自动驾驶功能在拥堵中行驶时,不容易给予驾驶员不安。
17.另外公开的一个方式是提示控制装置,在具备自动驾驶功能的车辆中使用,并且控制朝向车辆的驾驶员的信息的提示,该提示控制装置具备:后方掌握部,掌握在作为车辆的本车的后方行驶的后方车的存在;拥堵判定部,在车辆通过自动驾驶功能进行行驶的自动行驶期间,判定是否在特定模式的拥堵中,该特定模式被设定为后方车的追尾风险容易提高;以及提供限制部,在由拥堵判定部判定为在特定模式的拥堵中的情况下,增强在自动行驶期间提供的内容的显示的限制。
18.另外公开的一个方式是提示控制程序,在具备自动驾驶功能的车辆中使用,并且控制朝向车辆的驾驶员的信息的提示,该提示控制程序使至少一个处理部执行处理,该处理包括:掌握在作为车辆的本车的后方行驶的后方车的存在;在车辆通过自动驾驶功能进行行驶的自动行驶期间,判定是否在特定模式的拥堵中,该特定模式被设定为后方车的追
尾风险容易提高;以及在判定为在特定模式的拥堵中的情况下,增强在自动行驶期间提供的内容的显示的限制。
19.在这些方式中,在通过自动驾驶功能在拥堵中行驶时,若判定为是后方车的追尾风险容易提高的特定模式的拥堵,则限制提供给驾驶员的内容的显示。因此,能够通过在提供中的内容中产生的显示变化,向驾驶员通知后方车的追尾风险。根据这样的通知,在通过自动驾驶功能在拥堵中行驶时,不容易给予驾驶员不安。
20.另外公开的一个方式是提示控制装置,在具备自动驾驶功能的车辆中使用,并且控制朝向车辆的驾驶员的信息的提示,该提示控制装置具备:拥堵判定部,在车辆通过自动驾驶功能进行行驶的自动行驶期间,判定是否在拥堵中,并且判定是否在特定模式的拥堵中,该特定模式被设定为容易产生与作为车辆的本车相邻的相邻车的插入;以及提供限制部,在特定模式以外的非特定模式的拥堵中的情况下,与特定模式的拥堵中的情况相比,较宽地设定在自动行驶期间对驾驶员许可的驾驶以外的特定行为的允许范围。
21.另外公开的一个方式是提示控制程序,在具备自动驾驶功能的车辆中使用,并且控制朝向车辆的驾驶员的信息的提示,该提示控制程序使至少一个处理部执行处理,该处理包括:在车辆通过自动驾驶功能进行行驶的自动行驶期间,判定是否在特定模式的拥堵中,该特定模式被设定为容易产生与作为车辆的本车相邻的相邻车的插入;以及在特定模式以外的非特定模式的拥堵中的情况下,与特定模式的拥堵中的情况相比,较宽地设定在自动行驶期间对驾驶员许可的驾驶以外的特定行为的允许范围。
22.在这些方式中,在通过自动驾驶功能在拥堵中行驶时,若判定为是容易产生相邻车的插入的特定模式的拥堵,则缩小对驾驶员许可的特定行为的允许范围。因此,在有相邻车的插入产生的可能性时,通过允许范围的变化,能够不许可容易感到不安的特定行为。其结果是,在通过自动驾驶功能在拥堵中行驶时,不容易给予驾驶员不安。
23.另外公开的一个方式是提示控制装置,在具备自动驾驶功能的车辆中使用,并且控制朝向车辆的驾驶员的信息的提示,该提示控制装置具备:后方掌握部,掌握在作为车辆的本车的后方行驶的后方车的存在;拥堵判定部,在车辆通过自动驾驶功能进行行驶的自动行驶期间,判定是否在拥堵中;以及提供限制部,根据在拥堵中由后方掌握部掌握的后方车的状况,变更在自动行驶期间对驾驶员许可的驾驶以外的特定行为的允许范围。
24.另外公开的一个方式是提示控制程序,在具备自动驾驶功能的车辆中使用,并且控制朝向车辆的驾驶员的信息的提示,该提示控制程序使至少一个处理部执行处理,该处理包括:掌握在作为车辆的本车的后方行驶的后方车的存在;以及在车辆通过自动驾驶功能在拥堵中行驶的自动行驶期间,根据掌握的后方车的状况,变更对驾驶员许可的驾驶以外的特定行为的允许范围。
25.在这些方式中,在通过自动驾驶功能在拥堵中行驶时,根据在本车的后方行驶的后方车的状况,变更对驾驶员许可的特定行为的允许范围。因此,在有来自后方的追尾的风险时,能够通过允许范围的变化,不许可容易感到不安的特定行为。其结果是,在通过自动驾驶功能在拥堵中行驶时,不容易给予驾驶员不安。
26.另外,上述以及权利要求中的括号内的参照编号仅示出与后述的实施方式中的具体的构成的对应关系的一个例子,并不对技术范围进行任何限制。
附图说明
27.图1是表示包含本公开的第一实施方式的hcu的车载网络的整体图的图。
28.图2是表示驾驶席周边的接口的布局的一个例子的图。
29.图3是与相关构成一起示出在hcu构建的功能部的一个例子的图。
30.图4是示意性地表示由拥堵判定部判定的拥堵模式a的图。
31.图5是示意性地表示由拥堵判定部判定的拥堵模式b的图。
32.图6是示意性地表示由拥堵判定部判定的拥堵模式c的图。
33.图7是示意性地表示由拥堵判定部判定的拥堵模式d的图。
34.图8是表示判定拥堵模式的拥堵判定处理的详细的流程图。
35.图9是表示自动行驶期间的第二任务模式的显示的一个例子的图。
36.图10是表示包含插入可能性的通知的第二任务模式的显示的一个例子的图。
37.图11是表示包含插入预计的通知的第二任务模式的显示的一个例子的图。
38.图12是表示包含插入产生中的通知的第二任务模式的显示的一个例子的图。
39.图13是表示调整第二任务模式下的娱乐系的内容显示的限制的内容控制处理的详细的流程图。
40.图14是表示包含驾驶员进行了未许可的第二任务的情况下的通知的第二任务模式的显示的一个例子的图。
41.图15是表示控制第二任务的允许范围的范围控制处理的详细的流程图。
42.图16是表示基于第二任务的允许范围,监视驾驶员状态的状态监视处理的详细的图。
43.图17是与相关构成一起示出在第二实施方式的hcu构建的功能部的一个例子的图。
44.图18是示意性地表示拥堵模式e的一个例子的图。
45.图19是示意性地表示拥堵模式e的其它的一个例子的图。
46.图20是示意性地表示拥堵模式f的一个例子的图。
47.图21是示意性地表示拥堵模式f的其它的一个例子的图。
48.图22是示意性地表示拥堵模式g的一个例子的图。
49.图23是示意性地表示拥堵模式g的其它的一个例子的图。
50.图24是示意性地表示拥堵模式h的一个例子的图。
51.图25是示意性地表示拥堵模式j的一个例子的图。
52.图26是示意性地表示拥堵模式j的其它的一个例子的图。
53.图27是示意性地表示拥堵模式d的其它的一个例子的图。
54.图28是表示不限制内容的显示的场景的一个例子的图。
55.图29是与图30一起示出拥堵判定处理的详细的流程图。
56.图30是与图29一起示出拥堵判定处理的详细的流程图。
57.图31是一览地示出各拥堵模式下的其它车辆的风险的高低与第二任务的限制的程度的关联的图。
58.图32是表示包含周边车辆通知的第二任务模式的显示的一个例子的图。
59.图33是表示包含后方车辆通知的第二任务模式的显示的一个例子的图。
60.图34是表示内容控制处理的详细的流程图。
61.图35是表示范围控制处理的详细的流程图。
具体实施方式
62.以下,基于附图对本公开的多个实施方式进行说明。另外,有时通过对各实施方式中对应的构成要素附加相同的附图标记,来省略重复的说明。在各实施方式中仅对构成的一部分进行说明的情况下,该构成的其它的部分能够应用先行说明的其它的实施方式的构成。另外,不仅是在各实施方式的说明中明示的构成的组合,只要组合不特别产生妨碍,则即使未明示,也能够部分地组合多个实施方式的构成彼此。而且,多个实施方式以及变形例所记述的构成彼此的未明示的组合也通过以下的说明公开。
63.(第一实施方式)
64.本公开的第一实施方式的提示控制装置的功能通过图1所示的hcu(human machine interface control unit:人机界面控制单元)100实现。如图1~图3所示,hcu100与多个显示设备、音频装置24以及操作设备26等一起构成在车辆am中使用的hmi(human machine interface:人机界面)系统。hmi系统具备接受车辆am的乘客(例如驾驶员等)的操作的输入接口功能、和朝向驾驶员提示信息的输出接口功能。
65.hcu100以能够通信的方式与搭载于车辆am的车载网络1的通信总线99连接。hcu100是设置于车载网络1的多个节点中的一个。在通信总线99连接有驾驶员监视器29、周边监视传感器30、定位器35、导航(electronic control unit:电子控制器)ecu38、行驶控制ecu40、驾驶辅助ecu50a以及自动驾驶ecu50b等。与车载网络1的通信总线99连接的这些节点能够相互进行通信。这些装置以及ecu中的特定节点彼此可以相互直接电连接,能够不经由通信总线99来实施通信。
66.驾驶员监视器29构成为包含近红外光源以及近红外相机、和控制它们的控制单元。驾驶员监视器29以使近红外相机朝向驾驶席的头枕部分的姿势,例如设置于转向柱部的上表面或者仪表板9的上表面等。近红外相机也可以与后述的仪表显示器21或者中心信息显示器(以下,称为cid)22一体构成,设置于任意一个画面。
67.驾驶员监视器29通过近红外相机拍摄通过近红外光源照射了近红外光的驾驶员的头部。通过控制单元对近红外相机的拍摄图像进行图像解析。控制单元从拍摄图像提取驾驶员的眼点的位置以及视线方向等信息,并将提取出的驾驶员的状态信息通过通信总线99提供给hcu100等。
68.周边监视传感器30是监视车辆am的周边环境的自主传感器。周边监视传感器30能够从本车周围的检测范围检测预先规定的移动物体以及静止物体。周边监视传感器30能够至少检测在本车的周围行驶的前方车辆(参照图4的前行车af)、后方车辆、前后的侧方车辆(参照图4的相邻车ad)等。周边监视传感器30通过通信总线99将车辆周围的物体的检测信息提供给驾驶辅助ecu50a以及自动驾驶ecu50b等。
69.在周边监视传感器30例如包含有相机单元31以及毫米波雷达32。相机单元31既可以是包含单眼相机的构成,或者也可以是包含复眼相机的构成。相机单元31以能够拍摄车辆am的前方范围、侧方范围以及后方范围等的方式搭载于车辆am。相机单元31输出拍摄车辆周围而得到的拍摄数据以及拍摄数据的解析结果中的至少一方作为检测信息。毫米波雷
达32朝向本车周围照射毫米波或者准毫米波。毫米波雷达32输出通过接收被移动物体以及静止物体等反射的反射波的处理而生成的检测信息。周边监视传感器30也可以还具备激光雷达以及声纳等检测构成。
70.定位器35构成为包含gnss(global navigation satellite system:全球卫星定位系统)接收器以及惯性传感器等。定位器35组合由gnss接收器接收的测位信号、惯性传感器的测量结果、以及输出到通信总线99的车速信息等,对车辆am的本车位置以及行进方向等依次进行测位。定位器35将基于测位结果的车辆am的位置信息以及方位信息作为定位器信息,依次输出到通信总线99。
71.定位器35还具有地图数据库36。地图数据库36是以储存了许多的三维地图数据以及二维地图数据的大容量的存储介质为主体的构成。三维地图数据是所谓的高精度地图数据,包含道路的三维形状信息以及各车道的详细信息等、高度驾驶辅助以及自动驾驶所需要的信息。定位器35从地图数据库36读出当前位置周边的地图数据,并与定位器信息一起提供给驾驶辅助ecu50a以及自动驾驶ecu50b等。
72.导航ecu38基于从定位器35获取的定位器信息,掌握车辆am的当前位置。导航ecu38设定从当前位置到由驾驶员等设定的目的地为止的路径。导航ecu38将表示到目的地为止的设定路径的路径信息提供给hcu100。导航ecu38与hmi系统协作,组合画面显示以及声音消息等,并以交叉点以及分支点等向驾驶员通知车辆am的行进方向,作为到目的地为止的路径引导。
73.另外,智能手机等用户终端等也可以与车载网络1或者hcu100连接。这样的用户终端也可以代替定位器35,将位置信息、方位信息以及地图数据等提供给驾驶辅助ecu50a以及自动驾驶ecu50b。另外,用户终端也可以代替导航ecu38,将到目的地为止的路径信息提供给hcu100。详细而言,在由用户终端执行的应用中,基于驾驶员等的用户操作,设定到目的地为止的路径。用户终端能够组合画面显示以及声音消息等,以交叉点以及分支点等,对车辆am的行进方向进行引导。用户终端能够将由应用设定的到目的地为止的路径信息提供给hcu100。
74.行驶控制ecu40是包含微型控制器作为主体的电子控制装置。行驶控制ecu40至少具有制动控制ecu、驱动控制ecu以及转向操纵控制ecu的功能。行驶控制ecu40根据基于驾驶员的驾驶操作的操作指令、驾驶辅助ecu50a的控制指令以及自动驾驶ecu50b的控制指令中的任意一个,持续地实施各轮的制动力控制、车载动力源的输出控制以及转向操纵角控制。除此之外,行驶控制ecu40还基于设置于各轮的轮毂部分的车轮速度传感器41的检测信号,生成表示车辆am的当前的行驶速度的车速信息,并依次输出给通信总线99。
75.驾驶辅助ecu50a以及自动驾驶ecu50b作为构成自动驾驶系统50的车载ecu搭载于车辆am。通过自动驾驶系统50的搭载,车辆am成为具备自动驾驶功能的自动驾驶车辆。
76.驾驶辅助ecu50a是使辅助驾驶员的驾驶操作的驾驶辅助功能实现的车载ecu。驾驶辅助ecu50a能够进行美国汽车技术协会规定的自动驾驶等级中等级2左右的高度驾驶辅助或者部分的自动行驶控制。驾驶辅助ecu50a是包含具备处理部、ram、存储部、输入输出接口以及连接它们的总线等的控制电路作为主体的计算机。驾驶辅助ecu50a通过基于处理部的程序的执行,具有实现高度驾驶辅助的多个功能部。具体而言,驾驶辅助ecu50a具有acc(adaptive cruise control:自适应巡航控制)功能部、lta(lane tracing assist:车道追
随辅助)功能部以及lca(lane change assist:车道变更辅助)功能部。
77.自动驾驶ecu50b是使能够代理驾驶员的驾驶操作的自动驾驶功能实现的车载ecu。自动驾驶ecu50b仅在预先设定的运行设计区域(operational design domain,odd),能够进行系统成为控制主体的等级3以上的自主行驶。基于自动驾驶ecu50b的自主行驶控制与使用车辆am的国家或者地区的法规等对应,能够进行不需要驾驶员的基于目视观察的车辆周边的监视的脱眼(eyes-off)的自动驾驶。自动驾驶ecu50b能够实施在特定的可自动驾驶区域内许可等级3的自动行驶的区域限定等级3的自动驾驶、和在拥堵中行驶的情况下许可等级3的自动行驶的拥堵时等级3的自动驾驶等。另外,自动驾驶ecu50b也可以能够实现等级4以上的自动驾驶功能。
78.自动驾驶ecu50b是包含具备处理部51、ram52、存储部53、输入输出接口54以及连接它们的总线等的控制电路作为主体的计算机。自动驾驶ecu50b具备比驾驶辅助ecu50a高的运算能力,能够至少实施相当于acc、lta以及lca的行驶控制。自动驾驶ecu50b通过基于处理部51的程序的执行,具有环境识别部61、行动判断部62以及操作执行部63,作为实现车辆am的自动驾驶的多个功能部。
79.环境识别部61基于从定位器35获取的定位器信息以及地图数据、和从周边监视传感器30获取的检测信息,识别车辆am的行驶环境。具体而言,环境识别部61掌握多个车道中本车行驶的本车车道的位置、本车车道的车道形状、及本车周围的其它车辆的相对位置以及相对速度等。另外,也可以由定位器35实施本车车道的位置的确定。另外,环境识别部61的行驶环境的识别结果作为识别信息提供给hcu100。
80.行动判断部62基于环境识别部61的行驶环境的识别结果,生成使车辆am行驶的预定行驶线。行动判断部62基于由导航ecu38生成的路径信息,依次生成用于朝向目的地的最佳的预定行驶线。例如行动判断部62在设定路径有从干线车道脱离的分支点的情况下,生成朝向成为路径上的分支目的地的车道(以下,参照图7的路径车道lnr)进行车道变更那样的预定行驶线。
81.操作执行部63通过与行驶控制ecu40的协作,根据行动判断部62生成的预定行驶线,执行车辆am的加减速控制以及转向操纵控制等。具体而言,操作执行部63生成基于预定行驶线的控制指令,并朝向行驶控制ecu40依次输出。
82.接下来,依次对hmi系统所包含的多个显示设备、音频装置24、操作设备26以及hcu100的各详细进行说明。
83.在多个显示设备包含有仪表显示器21、cid22、平视显示器(以下,称为hud)23等。也可以在多个显示设备还包含有电子镜系统的各显示器emb、eml、emr(参照图2)。仪表显示器21、cid22以及hud23通过驾驶员的视觉提示信息。
84.仪表显示器21以及cid22例如是以液晶显示器或者oled(organic light emitting diode:有机发光二极管)显示器等为主体的构成。仪表显示器21以及cid22基于从hcu100获取的控制信号以及影像数据,使各种图像显示于显示画面。仪表显示器21例如设置于驾驶席的正面。cid22设置于仪表板9的中央部。cid22作为一个例子为10英寸以上的纵长的显示器。cid22的显示画面也可以弯曲为曲面状。并且,cid22的显示画面也可以与仪表显示器21的显示画面连续。cid22具有触摸面板的功能,例如检测驾驶员等对显示画面的触摸操作,具体而言检测轻敲、轻击、缩放以及滑动等操作等。
85.hud23基于从hcu100获取的控制信号以及影像数据,将在驾驶员前方成像的图像的光投影到挡风玻璃ws等中规定的投影区域pa。由挡风玻璃ws反射到车厢内侧的图像的光被坐在驾驶席的驾驶员感知。这样hud23使虚像显示比投影区域pa靠前方的空间中。驾驶员将通过hud23显示的视角va内的虚像与车辆am的前景重叠地视觉确认。
86.音频装置24具有以包围驾驶席的配置设置于车厢内的多个扬声器。音频装置24基于从hcu100获取的控制信号以及声音数据,使扬声器在车厢内播放报告音或者声音消息等。音频装置24通过驾驶员的听觉提示信息。
87.操作设备26是接受驾驶员等的用户操作的输入部。在操作设备26例如输入与自动驾驶功能的工作以及停止相关联的用户操作等。在操作设备26包含设置于方向盘的辐条部的转向开关、设置于转向柱部的操作杆、以及识别驾驶员的发话内容的声音输入装置等。
88.hcu100是在hmi系统中,控制仪表显示器21、cid22、hud23以及音频装置24的车载计算机。hcu100作为综合地管理朝向驾驶员的信息提示的提示控制装置发挥作用。hcu100构成为包含具备处理部11、ram12、存储部13、输入输出接口14以及连接它们的总线等的控制电路作为主体。
89.处理部11是与ram12结合的用于运算处理的硬件。处理部11构成为包含至少一个cpu(central processing unit:中央处理器)以及gpu(graphics processing unit:图形处理器)等运算核心。处理部11可以构成为还包含fpga(field-programmable gate array:现场可编程门阵列)、npu(neural network processing unit:神经网络处理单元)以及其它的具备专用功能的ip核心等。ram12可以构成为包含用于影像数据生成的视频ram。处理部11通过向ram12的访问,执行用于实现本公开的提示控制方法的各种处理。存储部13构成为包含非易失性的存储介质。在存储部13中储存有通过处理部11执行的各种程序(提示控制程序等)。
90.hcu100通过由处理部11执行存储于存储部13的提示控制程序,具有综合控制使用了各显示设备以及音频装置24的向驾驶员的信息提示的多个功能部。具体而言,在hcu100构建有信息获取部71以及提供控制部77等功能部。
91.信息获取部71从通信总线99获取表示车辆am的状态的车辆信息。在车辆信息例如包含有车速信息、表示自动驾驶功能的状态的状态信息、以及环境识别部61识别车辆周围的行驶环境的识别信息。信息获取部71从cid22以及操作设备26等获取表示用户操作的内容的操作信息。信息获取部71从驾驶员监视器29获取驾驶员的状态信息。
92.除此之外,信息获取部71获取导航地图mp(参照图9等)的生成所需要的定位器信息、地图数据以及路径信息等。另外,导航地图mp的影像数据也可以由导航ecu38以规定的分辨率生成,并提供给信息获取部71。
93.另外,信息获取部71获取视频内容ctv(参照图9等)等娱乐系的显示所需要的内容数据(视频文件等)。内容数据通过搭载于车辆am的电视调谐器、与hcu100电连接的外部媒体、以及与hcu100配对的智能手机等用户终端,提供给信息获取部71。
94.提供控制部77综合控制使用了各显示设备以及音频装置24的向驾驶员的信息的提供。提供控制部77能够根据对各内容设定的优先级变更使各显示设备显示的各内容的显示尺寸以及显示布局。作为一个例子,提供控制部77对于优先级越高的内容,越增大显示尺寸,或者越使其显示在外观上的画面近前侧。
95.具体而言,提供控制部77具有调停朝向驾驶员提示的信息的调停功能、和基于调停结果生成影像数据以及声音数据的数据生成功能。作为调停功能,提供控制部77基于由信息获取部71获取的各种获取信息,对成为提供候补的各内容设定上述的优先级。提供控制部77将判断为优先级高的内容选定为向驾驶员的提供对象。作为数据生成功能,提供控制部77基于内容的选定结果,生成提供给各显示设备的控制信号以及影像数据、和提供给音频装置24的控制信号以及声音数据。提供控制部77依次向各提示设备输出所生成的控制信号、影像数据以及声音数据等。
96.到此为止进行了说明的自动驾驶ecu50b以及hcu100暂时允许驾驶员的驾驶以外的行为的实施。若详细进行说明,则在车辆am通过基于自动驾驶ecu50b的等级3的自动驾驶功能进行自动行驶的自动行驶期间,能够对驾驶员许可驾驶以外的行为的预先规定的特定行为(以下,称为第二任务)。该情况下的驾驶员是在离开限定区域时或者在紧急时,从自动驾驶系统50接管驾驶的控制权的人(搭乘者)。到产生自动驾驶系统50的驾驶操作的实施要求、即驾驶替换的请求(take over request)为止,能够在法规上许可驾驶员实施第二任务。
97.第二任务能够被称为次要活动或者其它活动等。第二任务不得妨碍驾驶员应对来自自动驾驶系统50的驾驶操作的接管要求。例如,假定视频内容ctv(参照图9)等娱乐系的内容的视听、智能手机等的操作、以及进食等行为作为第二任务。
98.在驾驶员实施第二任务的情况下,驾驶员的注意脱离驾驶操作。因此,在第二任务的实施中,驾驶员容易对基于自动驾驶ecu50b的自动驾驶的举动变化抱有不安。作为一个例子,在车辆am在拥堵中行驶的情况下,由于拥堵的状况,而较多地产生其它车辆的插入。在这样的场景下,即使自动驾驶功能正常地进行动作,也有驾驶员对与其它车辆的插入对应的车辆am的举动变化感到不安的可能性。
99.在hcu100中还基于提示控制程序构建有在拥堵区间自动行驶中管理驾驶员的第二任务的实施的多个功能部。具体而言,hcu100还具有拥堵判定部72、插入预测部73、插入判定部74以及综合状态估计部75。
100.拥堵判定部72在车辆am通过自动驾驶功能进行行驶的自动行驶期间,判定是否在拥堵中。拥堵判定部72基于由信息获取部71获取的车速信息、地图数据、路径信息、以及车辆周围的识别信息等,判定车辆am(以下,也记载为本车)是否为卷入拥堵的状态。作为一个例子,拥堵判定部72在本车的行驶速度在预先规定的拥堵判定阈值(例如,10km/h)以下,并且在本车的前方存在前行车af的情况下,判定为在拥堵中。前行车af是在拥堵时本车在确保常识车间距离(例如,数m~十数m左右)的同时进行追随的前方的其它车辆。拥堵判定部72在拥堵判定后,在本车的行驶速度超过了预先规定的拥堵解除阈值(例如,50km/h)的情况下,判定为拥堵解除。
101.除此之外,拥堵判定部72在判定为本车的周围为拥堵中的情况下,进一步判别本车周围的拥堵模式。拥堵判定部72在预先设定的拥堵模式a~d(参照图4~图7)中,确定当前的本车周围的拥堵符合的拥堵模式。
102.图4所示的拥堵模式a以在包含三车道以上的道路上,本车在中央车道ln2行驶为前提。中央车道ln2是除了右端车道ln3以及左端车道ln1之外的车道。也可以在道路上存在多个中央车道ln2。拥堵模式a是在中央车道ln2上行驶的本车的前方以及左右的两侧方存
在其它车辆的拥堵模式。拥堵判定部72在本车的行驶速度在拥堵判定阈值以下,并且检测到前行车af以及左右的相邻车ad的全部的情况下,判别为是模式a的拥堵。
103.另外,也可以在判定相邻车ad的有无的检测范围不仅包含本车的侧方,也稍微(例如,5m左右)包含本车的前侧方以及后侧方。并且,相邻车ad的检测范围既可以恒定,或者也可以根据行驶速度进行调整。
104.图5所示的拥堵模式b以在包含多个车道的道路上,本车在右端车道ln3或者左端车道ln1行驶为前提。拥堵模式b是在本车的前方存在前行车af,并且在相邻的中央车道ln2存在相邻车ad的拥堵模式。拥堵判定部72在本车的行驶速度在拥堵判定阈值以下,并且均检测到前行车af以及相邻车ad的情况下,判别为是模式b的拥堵。
105.图6所示的拥堵模式c是在多个车道中,仅本车行驶的本车车道拥堵的拥堵模式。拥堵判定部72在本车的行驶速度在拥堵判定阈值以下,检测到前行车af,并且未检测到相邻车ad的情况下,判定为是模式c的拥堵。
106.图7所示的拥堵模式d是仅基于路径信息确定出的路径车道lnr(参照小点范围)拥堵的拥堵模式。拥堵判定部72在本车的行驶速度在拥堵判定阈值以下,并且在路径车道lnr上行驶的本车的前方检测到前行车af的情况下,判定为是模式d的拥堵。
107.以下基于图8,并参照图4~图7,对由以上的拥堵判定部72实施的拥堵判定处理的详细进行说明。拥堵判定部72基于表示自动驾驶ecu50b的自动行驶开始的状态信息的获取,开始拥堵判定处理。拥堵判定部72以规定的周期反复开始拥堵判定处理,直至自动驾驶ecu50b的自动行驶结束为止。
108.在s101中,基于最新的车速信息,判定本车的行驶速度是否在拥堵判定阈值以下。在s101中,判定为行驶速度超过拥堵判定阈值的情况下,进入s102。在s102中,判定为本车的周围不在拥堵中(非拥堵判定),并结束这次的拥堵判定处理。
109.另一方面,在s102中,判定为行驶速度在拥堵判定阈值以下的情况下,进入s103。在s103中,判定在本车的前方行驶的前行车af的有无。在s103中,判定为未检测到前行车af的情况下,进入s102,进行非拥堵判定。另一方面,在s103中,判定为检测到前行车af的情况下,进入s104。
110.在s104中,判定相邻车ad的有无。在s104中,判定为在相邻车道的全部检测到相邻车ad的情况下,进入s105。在s105中,判定为本车的周围在拥堵中(拥堵判定),并且判别拥堵模式,进入s109。在s105中,根据本车车道的位置,判别为是拥堵模式a或者拥堵模式b。
111.若在s104中,判定为有未检测到相邻车ad的相邻车道,则进入s106。在s106中,基于路径信息,判定本车车道是否为路径车道lnr。在s106中,判定为行驶中的本车车道不为路径车道lnr的情况下,进入s107。在s107中,进行本车车道的拥堵判定,并且判别为是拥堵模式c的拥堵中,并进入s109。
112.另一方面,在s106中,本车车道为路径车道lnr,而判定为路径车道lnr的拥挤的情况下,进入s108。在s108中,进行路径车道lnr的拥堵判定,并且判别为是拥堵模式d的拥堵中,并进入s109。
113.在s109中,基于最新的车速信息,判定本车的行驶速度是否超过拥堵解除阈值。在s109中,判定为行驶速度在拥堵解除阈值以下的情况下,返回到s104。另一方面,在s109中,判定为行驶速度超过拥堵解除阈值的情况下,结束这次的拥堵判定处理。
114.图3所示的插入预测部73通过探测相邻车ad向本车前方的插入的实施预兆,预测插入产生。作为一个例子,插入预测部73基于环境识别部61的识别信息,或者相机单元31的拍摄数据的解析结果,判定相邻车ad的本车车道侧的方向指示器(转向灯)是否闪烁。插入预测部73在相邻车ad的本车车道侧的方向指示器闪烁的情况下,探测该方向指示器的动作作为插入的实施预兆。另外作为其它的一个例子,插入预测部73也可以获取盲点监视器对相邻车道的其它车辆的检测信息。该情况下,探测与本车有速度差的相邻车ad的接近,作为向本车前方的插入的实施预兆。
115.另外,插入预测部73也可以将在车道内朝向相邻车道以及本车车道间的车道划分线位移的相邻车ad的横向移动探测为插入的实施预兆。并且,在相邻车ad搭载有自动驾驶功能的情况下,插入预测部73也可以通过与相邻车ad的车车间通信,获取相邻车ad的预定行驶线。该情况下,插入预测部73能够根据预定向本车车道的车道变更的相邻车ad的预定行驶线,来探测出插入的实施预兆。
116.插入判定部74判定是否实际正在实施相邻车ad向本车前方的插入。作为一个例子,插入判定部74基于环境识别部61的识别结果,或者相机单元31的拍摄数据的解析结果,判定相邻车ad是否已进入本车车道。插入判定部74在相邻车ad的至少一部分越过相邻车道以及本车车道间的车道划分线而进入本车车道的情况下,判定为正在实施相邻车ad的插入。除此之外,插入判定部74也可以在相邻车ad朝向本车车道的横向移动速度超过规定的速度的情况下,判定为相邻车ad在实施插入中。
117.这里,也可以由自动驾驶系统50实施通过拥堵判定部72的拥堵判定处理、通过插入预测部73的基于预兆探测的插入预测处理、以及通过插入判定部74的插入实施中的判定处理的一部分或者全部。在这样的方式中,拥堵判定部72、插入预测部73以及插入判定部74与信息获取部71协作,获取表示自动驾驶系统50的处理结果的信息。即,拥堵判定部72在自动行驶期间,基于来自自动驾驶系统50的获取信息,判定是否在拥堵中。同样地,插入预测部73基于来自自动驾驶系统50的获取信息,探测相邻车ad的插入的实施预兆。另外,插入判定部74基于来自自动驾驶系统50的获取信息,判定是否正在实施相邻车ad的插入。
118.综合状态估计部75从信息获取部71获取由驾驶员监视器29生成的驾驶员的状态信息。综合状态估计部75至少在自动行驶期间,判别驾驶员正在实施的第二任务的种类。具体而言,综合状态估计部75在预先假定的多个种类的第二任务的种类中,确定驾驶员当前正在实施的第二任务。
119.例如,预先假定电影以及有声读物等内容的视听、电视的视听、智能手机等的使用、以及这些行为以外的行为(进食等)等,作为第二任务。综合状态估计部75参照基于提供控制部77的内容的播放信息、以及从智能手机等发送的操作信息等,与驾驶员监视器29的状态信息组合,选择实施中的第二任务。综合状态估计部75也可以能够使用例如通过机械学习等生成的判定器(判定逻辑)等,根据近红外相机的拍摄图像,估计驾驶员实施的第二任务。
120.另外,也可以通过驾驶员监视器29实施确定驾驶员实施的第二任务的处理。若为这样的方式,则综合状态估计部75通过通信总线99以及信息获取部71获取由驾驶员监视器29生成的表示第二任务的种类的信息。
121.提供控制部77在许可第二任务的实施的自动行驶期间,根据本车的行驶环境,控
制与第二任务相关联地提供的视频内容ctv(参照图9)等的提供方法。若由拥堵判定部72判定为本车的周围在拥堵中,则提供控制部77根据拥堵模式以及相邻车ad的举动,限制基于cid22的娱乐系的内容等的提供。
122.具体而言,提供控制部77在许可第二任务的实施的自动行驶期间,使cid22的画面显示包含视频内容ctv等娱乐系的内容的第二任务模式的影像。作为一个例子,在第二任务模式的显示包含有视频内容ctv以及导航地图mp。在第二任务模式下,cid22的画面被分为上下两个画面区域。视频内容ctv显示于上侧的画面区域(以下,称为主显示域da1),以容易从驾驶员视觉确认。另一方面,导航地图mp显示于下侧的画面区域(以下,称为子显示域da2)。
123.另外,在第二任务模式下,可以适当地变更与视频内容ctv等一起显示的显示物。另外,在第二任务模式下,也可以在cid22的画面整体显示视频内容ctv。并且,可以能够由驾驶员等预先设定在第二任务模式下显示的内容。
124.提供控制部77通过基于拥堵判定部72、插入预测部73以及插入判定部74的提供信息等,在多个模式中切换第二任务模式,来限制视频内容ctv的显示。具体而言,图9所示的第二任务模式dmn是未限制视频内容ctv的显示的情况下的显示模式。在这样的没有限制的第二任务模式dmn下,视频内容ctv通常显示于主显示域da1。另一方面,图10~图12所示的各第二任务模式dmr1~dmr3对视频内容ctv等娱乐系的内容显示施加限制。
125.图10所示的第二任务模式dmr1是对视频内容ctv的显示施加了较弱的限制的情况下的显示模式。提供控制部77参照拥堵判定部72对拥堵模式的判别结果,判定是否在特定模式的拥堵中。这里,在拥堵模式c以及拥堵模式d中,容易产生期望向本车车道的移动的相邻车ad的强行插入。因此,在提供控制部77中,登记有拥堵模式c以及拥堵模式d,作为容易产生向本车前方的插入的特定模式的拥堵。提供控制部77在拥堵判定部72的判别结果表示拥堵模式c或者拥堵模式d的情况下,判定为在特定模式的拥堵中,而设定为第二任务模式dmr1。
126.在第二任务模式dmr1中,在主显示域da1显示插入可能性通知mwi。插入可能性通知mwi例如是包含“请注意向前方的插入”等注意提醒的消息的显示物。插入可能性通知mwi在主显示域da1的上缘附近,显示为横长的带状。插入可能性通知mwi与主显示域da1的视频内容ctv的一部分重叠。因此,视频内容ctv的大部分不被插入可能性通知mwi遮挡而进行显示。除此之外,即使显示插入可能性通知mwi,也继续视频内容ctv的影像以及声音的播放。因此,不会由于插入可能性通知mwi的追加显示而实际妨碍驾驶员对视频内容ctv的视听,而能够继续视听。
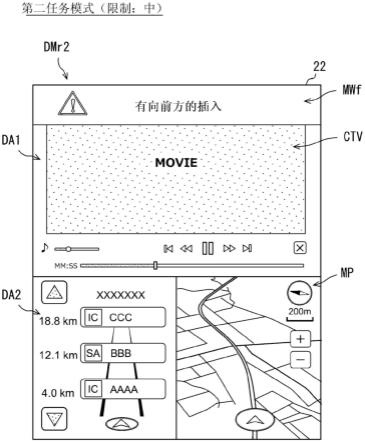
127.图11所示的第二任务模式dmr2是对视频内容ctv的显示施加了中等程度的限制的情况下的显示模式。提供控制部77在参照插入预测部73对插入实施预兆的探测结果,探测到插入的实施预兆的情况下,将cid22的显示模式设定为第二任务模式dmr2。在第二任务模式dmr2中,与第二任务模式dmr1相比,增强视频内容ctv的显示的限制。这样,提供控制部77在由插入预测部73探测到插入的实施预兆的情况下,与由拥堵判定部72判定为在特定模式的拥堵中的情况相比,更加限制视频内容ctv的显示。
128.在第二任务模式dmr2下,在主显示域da1显示插入预测通知mwf。插入预测通知mwf例如是包含“有向前方的插入”等注意提醒的消息的显示物。基于插入预测通知mwf的注意
提醒是比基于插入可能性通知mwi(参照图10)的注意提醒更强的内容,使驾驶员识别插入产生的可能性提高。
129.插入预测通知mwf与插入可能性通知mwi相同地,以与视频内容ctv的一部分重叠的方式在主显示域da1的上缘附近显示为横长的带状。插入预测通知mwf的纵向宽度比插入可能性通知mwi的纵向宽度宽。因此,第二任务模式dmr2下的视频内容ctv的显示面积比第二任务模式dmr1(参照图10)下的视频内容ctv的显示面积窄。如以上那样,在第二任务模式dmr2下,通过显示面积的减少实现视频内容ctv的显示限制的强化。另一方面,即使被插入预测通知mwf遮挡,也能够从驾驶员视觉确认视频内容ctv的大部分。除此之外,即使追加显示插入预测通知mwf,也继续视频内容ctv的影像以及声音的播放。因此,在第二任务模式dmr2下,也能够大致无障碍地继续驾驶员对视频内容ctv的视听。
130.图12所示的第二任务模式dmr3是对视频内容ctv的显示施加了较强的限制的情况下的显示模式。提供控制部77参照插入判定部74对插入实施的判定结果,在相邻车ad在实施插入中的情况下,设定为第二任务模式dmr3。在第二任务模式dmr3下,与各第二任务模式dmr1、dmr2相比,更加增强视频内容ctv的显示限制。如以上那样,提供控制部77在由插入判定部74判定为相邻车ad在插入的实施中的情况下,与由插入预测部73探测到插入的实施预兆的情况相比,更加限制视频内容ctv的显示。除此之外,提供控制部77在由插入判定部74判定为相邻车ad在插入的实施中的情况下,与由拥堵判定部72判定为在特定模式的拥堵中的情况相比,更加限制视频内容ctv的显示。
131.在第二任务模式dmr3下,在主显示域da1显示插入产生中通知mwa。插入产生中通知mwa例如是包含“插入产生中”等警告消息的显示物。基于插入产生中通知mwa的警告是比基于插入可能性通知mwi(参照图10)以及参照插入预测通知mwf(图11)的注意提醒更强的内容。
132.插入产生中通知mwa在主显示域da1的中央,显示为与视频内容ctv重叠。插入产生中通知mwa与视频内容ctv相同为横长的矩形形状。插入产生中通知mwa的显示面积比插入可能性通知mwi以及插入预测通知mwf的各显示面积大。插入产生中通知mwa与视频内容ctv的中央重叠地显示,遮挡视频内容ctv的大部分。除此之外,若显示插入产生中通知mwa,则中断视频内容ctv的影像以及声音的播放。如以上那样,在第二任务模式dmr3下,通过显示面积的减少和播放中断来实现视频内容ctv的显示限制的强化。其结果是,根据系统侧的判断,强制地结束驾驶员对视频内容ctv的视听。
133.以下基于图13,并参照图9~图12,对如以上的说明那样,通过第二任务模式的切换,调整娱乐系的内容显示限制的内容控制处理的详细进行说明。提供控制部77基于指示视频内容ctv等的播放开始的用户操作,或者表示自动驾驶ecu50b的自动行驶开始的状态信息的获取,开始内容控制处理。
134.在s121中,将cid22设定为视频内容ctv的显示没有限制的第二任务模式dmn(参照图9),并进入s122。在s122中,参照拥堵判定部72的拥堵判定的结果,判定本车的周围是否拥堵。在s122中,判定为不在拥堵中的情况下,返回到s121,使没有限制的第二任务模式dmn继续。另一方面,在s122中,判定为在拥堵中的情况下,进入s123。
135.在s123中,参照插入判定部74的判定结果,判定相邻车ad是否在朝向本车的前方的插入的实施中。在s123中,判定为相邻车ad在插入实施中的情况下,进入s130。在s130中,
设定为对视频内容ctv的显示施加了较强的限制的第二任务模式dmr3(参照图12),并进入s131。根据s130,在视频内容ctv覆盖显示插入产生中通知mwa。另一方面,在s123中,判定为相邻车ad不在插入实施中的情况下,进入s124。
136.在s124中,参照插入预测部73的判定结果,判定是否探测到相邻车ad的插入的实施预兆,即插入预测的有无。在s124中,判定为没有相邻车ad的插入预测的情况下,进入s125。在s125中,设定为没有限制的第二任务模式dmn(参照图9),并进入s131。另一方面,在s124中,判定为有相邻车ad的插入预测的情况下,进入s126。
137.在s126中,参照拥堵判定部72对拥堵模式的判别结果,判定本车是否在特定模式的拥堵中。在s126中,判定为在特定模式以外(以下,非特定模式)的拥堵中的情况下,即,判别结果表示拥堵模式a或者拥堵模式b的情况下,进入s128。在s128中,设定为对视频内容ctv的显示施加了较弱的限制的第二任务模式dmr1(参照图10),并进入s131。根据s128,在主显示域da1的上缘追加显示插入可能性通知mwi。
138.在s126中,判定为在特定模式的拥堵中的情况下,即判别结果表示拥堵模式c或者拥堵模式d的情况下,进入s127。在s127中,判定拥堵中的本车的行驶速度是否超过速度阈值(例如,30km/h左右)。在s127中,判定为行驶速度小于速度阈值,本车为低速行驶中(0~29km/h左右)的情况下,进入s129。在s129中,设定为对视频内容ctv的显示施加了中等程度的限制的第二任务模式dmr2(参照图11),并进入s131。根据s129,在主显示域da1的上缘追加显示插入预测通知mwf。
139.在s127中,判定为行驶速度在速度阈值以上,本车在高速行驶中(30~50km/h左右)的情况下,在s130中设定为第二任务模式dmr3,并进入s131。
140.在s131中,判定是否使第二任务模式结束。作为一个例子,在有使视频内容ctv的显示结束的用户操作的情况下,在s131中,进行第二任务模式的结束判定。另外,作为其它的一个例子,在获取了表示基于自动驾驶ecu50b的等级3的自动驾驶的结束或者中断的状态信息的情况下,在s131中,进行第二任务模式的结束判定。在s131中,判定了第二任务模式的继续的情况下,返回到s122,使向驾驶员的视频内容ctv等的提供继续。根据以上,即使在例如判别出的拥堵模式从非特定模式移至特定模式的情况下,也能够通过第二任务模式的切换,实施增强视频内容ctv的显示限制的调整。
141.另一方面,在s131中,判定为使第二任务模式结束的情况下,进入s132。在s132中,使cid22的画面从第二任务模式切换为通常模式,并结束一系列的内容控制处理。另外,可以在通常模式的cid22中,除了导航地图mp之外,还显示有车辆am的状态显示以及后方相机的影像等。
142.图3所示的提供控制部77基于拥堵判定部72的提供信息变更在自动行驶期间对驾驶员许可的第二任务的允许范围。提供控制部77在非特定模式的拥堵中的情况下,与特定模式的拥堵中的情况相比,进行扩大对驾驶员许可的第二任务的允许范围的调整。
143.若进行详细说明,则从自动驾驶系统50向驾驶员的驾驶替换存在根据系统侧的判断有计划地将控制权交接给驾驶员的移交、和在紧急性较高的状况下驾驶员根据自己的判断获取控制权的超驰。使驾驶员中断实施中的第二任务,并使驾驶员从自动驾驶系统50接管驾驶操作的驾驶替换相当于移交。
144.这里,在仅对显示于cid22的视频内容ctv进行视听的情况下,未占用驾驶员的双
手。因此,驾驶员能够迅速地应对用于移交的驾驶替换的请求。因此,包含视频内容ctv的视听的cid22的操作成为容易许可的第二任务。另一方面,在进行用户终端的操作以及进食的情况下,成为占用驾驶员的双手或者单手的状态。因此,驾驶员难以迅速地应对用于移交的驾驶替换的请求。因此,用户终端的操作以及进食等的行为成为不容易许可的第二任务。
145.根据以上的理由,提供控制部77在本车在插入产生频率比较少的非特定模式的拥堵中自动行驶的情况下,在第二任务的允许范围内不仅包含cid22的操作,也包含用户终端的操作以及进食等行为。与此相对,在本车在插入产生频率比较多的特定模式的拥堵中自动行驶的情况下,在第二任务的允许范围包含cid22的操作,另一方面,从第二任务的允许范围除去用户终端的操作以及进食等行为。
146.提供控制部77在由综合状态估计部75确定出的实施中的第二任务是脱离允许范围的不许可的种类的情况下的第二任务模式dma下,如图14所示,使中断要求通知mwr显示于cid22的主显示域da1。中断要求通知mwr例如是包含“实施未许可的任务”等注意提醒的消息的显示物。中断要求通知mwr在主显示域da1的上缘附近,以与视频内容ctv的一部分重叠的方式显示为横长的带状。除此之外,提供控制部77与中断要求通知mwr的显示追加一起,通过音频装置24播放要求实施中的任务的中断的声音消息。
147.以下基于图15以及图16,并参照图3以及图14,对如以上的说明那样控制第二任务的允许范围的范围控制处理、以及监视驾驶员状态并对不许可的任务的实施进行注意提醒的状态监视处理的各详细进行说明。提供控制部77基于表示自动驾驶ecu50b的自动行驶开始的状态信息的获取,开始范围控制处理以及状态监视处理。提供控制部77以规定的周期反复开始范围控制处理以及状态监视处理,直至结束自动驾驶ecu50b的自动行驶为止。
148.在图15所示的范围控制处理的s141中,参照拥堵判定部72对拥堵模式的判别结果,掌握本车周围的拥堵模式,并进入s142。在s142中,判定是否在特定模式的拥堵中。在s142中,判定为在特定模式的拥堵中的情况下,即判别结果表示拥堵模式c或者拥堵模式d的情况下,进入s143。在s143中,较窄地设定第二任务的允许范围,以使得不许可用户终端的操作以及进食等行为,并结束这次的范围控制处理。
149.另一方面,在s142中,判定为非特定模式的拥堵中的情况下,即判别结果表示拥堵模式a或者拥堵模式b的情况下,进入s144。在s144中,较宽地设定第二任务的允许范围,以使得许可用户终端的操作以及进食等行为,并结束这次的范围控制处理。
150.在图16所示的状态监视处理的s151中,掌握通过范围控制处理(参照图15)设定的第二任务的许可范围,并进入s152。在s152中,掌握驾驶员当前正在实施的第二任务,并进入s153。在s153中,判定通过s152掌握的实施中的第二任务是否在通过s151掌握的当前的允许范围内。在s153中,判定为实施中的第二任务在允许范围内的情况下,结束这次的状态监视处理。
151.另一方面,在s153中,判定为实施中的第二任务在允许范围外的情况下,进入s154。在s154中,使实施中的第二任务的中断要求朝向驾驶员输出,并结束这次的状态监视处理。根据s154,在cid22中追加显示有中断要求通知mwr(参照图14)。
152.在到此为止进行了说明的第一实施方式中,在通过自动驾驶功能在拥堵中行驶时,若探测到相邻车ad向前方的插入的实施预兆,则限制提供给驾驶员的视频内容ctv的显示。因此,能够通过在提供中的视频内容ctv中产生的显示变化,对驾驶员通知相邻车ad的
插入产生的预测。根据这样的通知,在通过自动驾驶功能在拥堵中行驶时,不容易给予驾驶员不安。
153.详细而言,若产生相邻车ad的插入,则自动驾驶功能例如实施确保与相邻车ad的距离的制动控制。注意朝向视频内容ctv而未掌握本车周围的状况的驾驶员突然感受到这样的本车的举动变化,而容易成为驾驶员的不安的重要因素。因此,若在探测到插入的实施预兆的情况下,使视频内容ctv产生显示变化,则驾驶员能够在本车实际产生举动变化以前,预先识别举动变化的产生的可能性。其结果是,在实际产生插入时,能够减轻驾驶员对本车的举动变化感到的不安。
154.除此之外,在第一实施方式中,在通过自动驾驶功能在拥堵中行驶时,若判定为是容易产生相邻车ad的插入的特定模式的拥堵,则限制提供给驾驶员的视频内容ctv的显示。因此,能够通过在提供中的视频内容ctv中产生的显示变化,向驾驶员通知相邻车ad的插入产生的可能性。根据这样的通知,在通过自动驾驶功能在拥堵中行驶时,不容易给予驾驶员不安。
155.如以上那样,若在容易产生插入的特定模式的拥堵的情况下,使视频内容ctv产生显示变化,则驾驶员能够在本车实际产生举动变化以前,预先识别产生举动变化的可能性。其结果是,在实际产生插入时,能够减轻驾驶员对本车的举动变化感到的不安。
156.另外,在第一实施方式中,在通过自动驾驶功能在拥堵中行驶时,若判定为是容易产生相邻车ad的插入的特定模式的拥堵,则缩小对驾驶员许可的特定行为的允许范围。因此,在有相邻车ad的插入产生的可能性时,通过允许范围的变化,能够不许可容易感到不安的第二任务。其结果是,在通过自动驾驶功能在拥堵中行驶时,不容易给予驾驶员不安。
157.如以上那样,若在容易产生插入的特定模式的拥堵的情况下,预先使难以应对的第二任务中断,则驾驶员能够在本车实际产生举动变化以前,预先识别产生举动变化的可能性。其结果是,在实际产生插入时,能够减轻驾驶员对本车的举动变化感到的不安。
158.并且,在第一实施方式中,在由插入判定部74判定为相邻车ad在插入实施中的情况下,与由插入预测部73探测到相邻车ad的插入的实施预兆的情况相比,更加限制视频内容ctv的显示。
159.除此之外,在第一实施方式中,在由插入判定部74判定为相邻车ad在插入实施中的情况下,与由拥堵判定部72判定为在特定模式的拥堵中的情况相比,更加限制视频内容ctv的显示。
160.如以上那样,若较强地限制视频内容ctv的显示,则驾驶员的注意容易脱离视频内容ctv,并朝向本车周围的状况。其结果是,驾驶员能够预测起因于相邻车ad的插入的本车的举动变化。因此,能够减轻驾驶员对实际的举动变化的不安。
161.另一方面,通过在实际未实施插入的情况下,缓和视频内容ctv的显示限制,从而驾驶员能够在使注意朝向本车周围的状况的同时,继续视频内容ctv的视听。其结果是,能够在减轻驾驶员的不安的同时,进行不容易感到厌烦的注意提醒。
162.另外,在第一实施方式中,由拥堵判定部72判定为在特定模式的拥堵中的情况下的显示限制比由插入预测部73探测到相邻车ad的插入的实施预兆的情况下的显示限制弱。根据以上,能够在使驾驶员的注意朝向本车周围的同时,实施不妨碍视频内容ctv的视听的注意提醒。
163.并且,在第一实施方式中,由提供控制部77判定拥堵中的本车的行驶速度是否超过速度阈值。而且,在本车的行驶速度超过速度阈值的情况下,与行驶速度小于速度阈值的情况相比,更加限制内容的显示。这样,若行驶速度较高,则难以确保基于预兆探测进行注意提醒的时间。因此,根据在高速行驶中增强视频内容ctv的显示限制的处理,能够使驾驶员的注意尽早朝向本车周围,使驾驶员有充裕的时间来识别举动变化的产生可能性。
164.另外,在上述实施方式中,视频内容ctv相当于“内容”,提供控制部77相当于“提供限制部”,hcu100相当于“提示控制装置”。另外,如上述那样,拥堵模式a以及拥堵模式b相当于“非特定模式”的拥堵,拥堵模式c以及拥堵模式d相当于“特定模式”的拥堵。
165.(第二实施方式)
166.图17~图35所示的本公开的第二实施方式是第一实施方式的变形例。在第二实施方式中,在车辆am通过自动驾驶功能在拥堵中行驶的情况下,掌握车辆am的后方的状况,并实施与来自后方的追尾的预计对应的视频内容ctv的显示限制。
167.图17所示的周边监视传感器30除了具有检测本车的前方以及侧方的相机单元31以及毫米波雷达32之外,还具有将本车的后方以及后侧方作为检测范围的相机单元31以及毫米波雷达32。对于周边监视传感器30而言,除了前行车af以及相邻车ad之外,还检测后方车ab(参照图18)以及后侧方车abs(参照图18),作为在本车的周围行驶的其它车辆。对于周边监视传感器30而言,除了相机单元31以及毫米波雷达32之外,还能够在后方车ab以及后侧方车abs的检测中使用激光雷达以及声纳等检测构成。周边监视传感器30将本车后方的检测信息提供给自动驾驶系统50。
168.自动驾驶系统50的环境识别部61基于周边监视传感器30对本车后方的检测信息,掌握后方车ab以及后侧方车abs的相对位置以及相对速度等。环境识别部61识别在接近本车的位置在本车车道进行行驶的接近后方车ab1(参照图18)、和在与接近后方车ab1相比远离本车的位置进行行驶的远方后方车ab2(参照图25),作为后方车ab。环境识别部61基于与本车的车间距离以及相对速度(车间时间)等,区别接近后方车ab1以及远方后方车ab2。作为一个例子,接近后方车ab1是在拥堵时隔开常识间隔(数m~十数m左右)追随本车进行行驶的其它车辆。远方后方车ab2并不限定于在本车车道行驶的其它车辆,也可以是在相邻车道进行行驶的其它车辆。从本车到接近后方车ab1以及远方后方车ab2为止的各车间距离均稳定。环境识别部61识别与本车相比位于后方,并接近本车在相邻车道进行行驶的其它车辆作为后侧方车abs。环境识别部61将后方车ab以及后侧方车abs的识别结果与其它的行驶环境的识别结果一起提供给hcu100。
169.hcu100还具有后方掌握部76,作为在拥堵区间自动行驶中管理驾驶员的第二任务的实施的功能部。后方掌握部76基于经由信息获取部71从环境识别部61获取的识别结果,掌握在车辆am的后方行驶的后方车ab以及后侧方车abs的存在。
170.拥堵判定部72在拥堵中(拥堵时等级3)的自动行驶期间,基于由后方掌握部76掌握到的后方车ab以及后侧方车abs的信息,判别本车周围的拥堵模式。除了第一实施方式的拥堵模式a~d(参照图4~图7)之外,拥堵判定部72还根据本车后方的其它车辆的状况,在拥堵模式e~h、j、k(参照图18~图26以及图31)中,确定当前的本车周围的拥堵符合的拥堵模式。
171.图18以及图19所示的拥堵模式e是车辆am的周围挤满其它车辆的状态。拥堵判定
部72在除了前行车af以及相邻车ad之外,接近后方车ab1以及后侧方车abs全部存在的情况下,判别为是模式e的拥堵。图18所示的拥堵模式e以拥堵模式a(参照图4)为前提,车辆am以及接近后方车ab1在包含三车道以上的道路的中央车道ln2上行驶。后侧方车abs存在于左端车道ln1以及右端车道ln3双方。图19所示的拥堵模式e以拥堵模式b(参照图5)为前提,车辆am以及接近后方车ab1在左端车道ln1或者右端车道ln3进行行驶。后侧方车abs在中央车道ln2进行行驶。
172.图20以及图21所示的拥堵模式f是仅本车车道的后方空闲的状态。拥堵判定部72在存在前行车af、相邻车ad以及后侧方车abs,另一方面不存在后方车ab(接近后方车ab1)的情况下,判别为是模式f的拥堵。图20所示的拥堵模式f以拥堵模式a(参照图4)为前提,成为在中央车道ln2行驶的车辆am的后方空闲的状态。另一方面,在左端车道ln1以及右端车道ln3双方存在后侧方车abs。图21所示的拥堵模式f以拥堵模式b(参照图5)为前提,成为在左端车道ln1或者右端车道ln3行驶的车辆am的后方空闲的状态。另一方面,在中央车道ln2存在后侧方车abs。
173.图22以及图23所示的拥堵模式g是仅本车车道以外(相邻车道)的后方空闲的状态。拥堵判定部72在存在前行车af、相邻车ad以及后方车ab(接近后方车ab1),另一方面不存在后侧方车abs的情况下,判别为是模式g的拥堵。图22所示的拥堵模式g以拥堵模式a(参照图4)为前提,车辆am以及接近后方车ab1在中央车道ln2上行驶。与此相对,在左端车道ln1以及右端车道ln3的至少一方产生不存在后侧方车abs的空间。图23所示的拥堵模式g以拥堵模式b(参照图5)为前提,车辆am以及接近后方车ab1在左端车道ln1或者右端车道ln3上行驶。与此相对,在中央车道ln2产生不存在后侧方车abs的空间。
174.图24所示的拥堵模式h是本车车道以外(相邻车道)空闲的状态。拥堵判定部72在存在前行车af以及后方车ab(接近后方车ab1),另一方面不存在后侧方车abs的情况下,判别为是模式h的拥堵。拥堵模式h以拥堵模式c(参照图6)为前提,车辆am以及接近后方车ab1在中央车道ln2上行驶。与此相对,在左端车道ln1以及右端车道ln3的至少一方产生不存在相邻车ad以及后侧方车abs的空间。
175.图25以及图26所示的拥堵模式j是不存在接近后方车ab1以及后侧方车abs,另一方面存在以与本车亦即车辆am大致相同的速度行驶的远方后方车ab2的状态。图25所示的拥堵模式j以拥堵模式a(参照图4)为前提,在中央车道ln2上行驶的车辆am的后方存在至少一台远方后方车ab2。图26所示的拥堵模式j以拥堵模式b(参照图5)为前提,在左端车道ln1或者右端车道ln3上行驶的车辆am的后方存在至少一台远方后方车ab2。
176.拥堵模式k(参照图31)是除了接近后方车ab1以及后侧方车abs之外,也不存在远方后方车ab2的状态。拥堵判定部72在通过周边监视传感器30识别不到远方后方车ab2的情况下,判别为是模式k的拥堵。
177.图17所示的拥堵判定部72在基于路径信息确定出的路径车道lnr(参照图8以及图27的小点范围)上行驶的拥堵模式d下,进一步判定路径车道lnr是否为风险区间ser。风险区间ser是与合流或者分支相关联的区间。具体而言,将从干线车道分支的分支车道(参照图8)中与干线车道相接的区间、以及与合流车道连接的干线的被合流车道(参照图27)中与合流车道相接的区间等规定为风险区间ser。在这样的风险区间ser中行驶的情况下,如后述那样,继续视频内容ctv的显示限制或者第二任务的限制,直至车辆am通过风险区间ser
的结束地点ne为止。
178.拥堵判定部72在车辆am的行驶速度在拥堵判定阈值以下,并且检测到前行车af的情况下,判定行驶中的道路是否是单侧单车道的道路(参照图28)。在这样的单侧单车道的道路中,实际不产生从相邻的对向车道lna向本车车道lns的插入。因此,在拥堵判定部72判定为在单侧单车道的道路上行驶的情况下,中止提供控制部77的视频内容ctv的显示限制或者第二任务的限制。
179.以下基于图29以及图30,并参照图17~图26以及图31,对以上的由拥堵判定部72实施的第二实施方式的拥堵判定处理的详细进行说明。另外,第二实施方式中的s201~s207、s209的处理内容与第一实施方式的s101~s108(参照图8)的处理内容实际相同。因此,省略该步骤的详细的说明。
180.在s208中,判定拥堵中的路径车道lnr是否为风险区间ser。在s208中,判定为不是风险区间ser的情况下,进入s207,判定为本车周围为模式c的拥堵模式。另一方面,在判定为风险区间ser的情况下,进入s209,判定为是插入风险比拥堵模式c高的拥堵模式d。
181.在通过s203~s209确定出前方以及侧方的拥堵模式之后的s210中,掌握作为在本车的后方行驶的后方车的、接近本车的接近后方车ab1的存在。在s210中,判定为存在接近后方车ab1的情况下,进入s211,掌握在相邻车道行驶的后侧方车abs的存在。在s211中,判定为在全部的相邻车道存在后侧方车abs的情况下,进入s212。在s212中,判定为本车周围为模式e的拥堵模式,更新拥堵模式a~d的判定结果,并进入s221。
182.另一方面,在s211中,判定为有不存在后侧方车abs的相邻车道的情况下,进入s213。在s213中,判定在相邻车道行驶的相邻车ad的有无。在s213中,判定为在全部的相邻车道存在相邻车ad的情况下,进入s214。在s214中,判定为本车周围为模式g的拥堵模式,更新拥堵模式a或者b的判定结果,并进入s221。与此相对,在判定为有不存在相邻车ad的相邻车道的情况下,从s213进入s215。在s215中,判定为本车周围为模式h的拥堵模式,更新拥堵模式c或者d的判定结果,并进入s221。
183.在s210中,判定为不存在接近后方车ab1的情况下,进入s216,掌握在相邻车道行驶的后侧方车abs的存在。在s216中,判定为在全部的相邻车道存在后侧方车abs的情况下,进入s217。在s217中,判定为本车周围为模式f的拥堵模式,更新拥堵模式a~d的判定结果,并进入s221。
184.另一方面,在s216中,判定为有不存在后侧方车abs的相邻车道的情况下,进入s218。在s218中,判定远方后方车ab2的有无。在s218中,判定为存在至少一台远方后方车ab2的情况下,进入s219。在s219中,判定为本车周围为模式j的拥堵模式,更新拥堵模式a~d的判定结果,并进入s221。与此相对,在判定为不存在远方后方车ab2的情况下,进入s220。在s220中,判定为本车周围为模式k的拥堵模式,更新拥堵模式a~d的判定结果,并进入s221。并且,在由于道路形状以及气象信息等重要因素而本车后方的状况不明的情况下,维持拥堵模式a~d的判定结果,并进入s221。
185.在s221中,基于最新的车速信息,判定本车的行驶速度是否超过拥堵解除阈值。在s221中,判定为行驶速度在拥堵解除阈值以下的情况下,返回到s204。另一方面,在s221中,判定为行驶速度超过拥堵解除阈值的情况下,结束这次的拥堵判定处理。
186.提供控制部77(参照图17)根据通过后方掌握部76掌握到的后方车ab的状况,变更
在自动行驶期间对驾驶员许可的第二任务的允许范围,限制视频内容ctv的显示。具体而言,提供控制部77基于拥堵判定部72对拥堵模式的判别结果等,预测从本车后方的追尾的风险,并根据追尾风险切换第二任务模式。提供控制部77通过第二任务模式的切换,调整在自动行驶期间提供的娱乐系的内容显示限制。在通过拥堵判定部72判定为在特定模式的拥堵中的情况下,提供控制部77能够增强提供的视频内容ctv的显示的限制。
187.详细而言,在提供控制部77中,对各拥堵模式设定追尾风险的高低(参照图31)。作为一个例子,追尾风险的排位为拥堵模式k、拥堵模式j、拥堵模式e、拥堵模式g、拥堵模式、拥堵模式f、拥堵模式a~d。即,不存在后方车ab的拥堵模式k为追尾风险最低的拥堵模式。与此相对,不能确认后方车ab的存在的拥堵模式a~d的状态为追尾风险最高的拥堵模式。追尾风险越低,提供控制部77越缓和第二任务的限制,越减弱或者消除视频内容ctv的显示限制。
188.提供控制部77在掌握不到与本车在同一车道上行驶的后方车ab的情况下,与掌握到后方车ab的情况相比,较窄地设定第二任务的允许范围,增强视频内容ctv的显示限制。即,在提供控制部77中,将掌握不到后方车ab的拥堵模式f、a~d登记为后方车ab的追尾风险容易提高的特定模式的拥堵。另一方面,作为除了拥堵模式f、a~d之外的其它的拥堵模式的、通过接近后方车ab1或者远方后方车ab2保护本车后方的拥堵模式成为非特定模式的拥堵。
189.提供控制部77在由拥堵判定部72识别为拥堵模式k、j、e中的任意一个的情况下,设定为不限制视频内容ctv的显示的第二任务模式dmn(参照图9)。其结果是,视频内容ctv在主显示域da1进行通常显示。
190.提供控制部77在由拥堵判定部72识别为拥堵模式g或者h的情况下,设定为稍微限制视频内容ctv的显示的第二任务模式dmr1(参照图32)。在第二任务模式dmr1下,在主显示域da1显示周边车辆通知mwis。周边车辆通知mwis例如是包含“请注意周围的车辆”等注意提醒的消息的显示物。周边车辆通知mwis在主显示域da1的上缘附近显示为横长的带状,稍微遮挡视频内容ctv的上缘部分。在第二任务模式dmr1下,继续视频内容ctv的影像以及声音的播放。
191.提供控制部77在由拥堵判定部72识别为拥堵模式f、a~d(特定模式)中的任意一个的情况下,设定为进一步限制视频内容ctv的显示的第二任务模式dmr2(参照图33)。在第二任务模式dmr2下,在主显示域da1显示周边车辆注意mwbn。周边车辆注意mwbn例如是包含“请注意前方
·
后方的车辆”等注意提醒的消息的显示物。基于周边车辆注意mwbn的注意提醒成为比基于周边车辆通知mwis(参照图32)的信息提示强的内容。周边车辆注意mwbn与周边车辆通知mwis相同地以与视频内容ctv的一部分重叠的方式,在主显示域da1的上缘附近显示为横长的带状。即使被周边车辆注意mwbn遮挡,也能够从驾驶员视觉确认视频内容ctv的大部分。
192.以下基于图34,并参照图9、图12、图17、图31~图33等,对如以上那样,通过第二任务模式的切换来调整内容显示限制的第二实施方式的内容控制处理的详细进行说明。在车辆am通过自动驾驶功能进行行驶的自动行驶期间,通过提供控制部77实施内容控制处理。
193.在s221中,将cid22的显示设定为第二任务模式dmn(参照图9),并进入s222。在s222中,基于拥堵判定部72的拥堵判定的结果,判定本车周围是否在拥堵中。在s222中,判
定为不在拥堵中的情况下,返回到s221,使第二任务模式dmn继续。另一方面,在s222中,判定为在拥堵中的情况下,进入s223。
194.在s223中,判定行驶中的道路是否为单侧单车道的道路。在s223中,判定为在单侧单车道的道路上行驶的情况下,返回到s221,使第二任务模式dmn继续。其结果是,中止拥堵中的视频内容ctv的显示限制。另一方面,在s223中,判定为在包含多个车道的道路上行驶的情况下,进入s224。
195.在s224中,基于插入判定部74的判定结果,判定相邻车ad是否在朝向本车的前方的插入的实施中。在s224中,判定为相邻车ad在插入实施中的情况下,进入s232。在s232中,设定为第二任务模式dmr3(参照图12),并进入s233。另一方面,在s224中,判定为相邻车ad不在插入实施中的情况下,进入s225。在s225中,参照插入预测部73的判定结果,判定插入预测的有无。在s225中,判定为没有相邻车ad的插入预测的情况下,进入s226。在s226中,设定为第二任务模式dmn,并进入s233。另一方面,在s225中,判定为有相邻车ad的插入预测的情况下,进入s227。
196.在s227中,判定本车周围的拥堵是否符合模式k、j、e中的任意一个。在s227中,判定为是模式k、j、e中的任意一个的拥堵的情况下,进入s226,设定为第二任务模式dmn。另一方面,在s227中,判定为不符合模式k、j、e中的任意一个的情况下,进入s228。
197.在s228中,判定是否在追尾风险容易提高的特定模式的拥堵中。具体而言,在s228中,判定本车周围的拥堵是否符合模式a~d、f中的任意一个。在s228中,判定为不符合模式a~d、f中的任意一个,即为模式g或者h的拥堵中的情况下,进入s230。在s230中,设定为施加了较弱的限制的第二任务模式dmr1(参照图32),并进入s233。另一方面,在s228中,判定为是模式a~d、f中的任意一个的拥堵,即特定模式的拥堵的情况下,进入s229。
198.在s229中,判定拥堵中的行驶速度是否超过速度阈值。在s229中,判定为行驶速度小于速度阈值的情况下,进入s231。在s231中,设定为与第二任务模式dmr1相比增强视频内容ctv的显示限制的第二任务模式dmr2(参照图33),并进入s233。另一方面,在s229中,判定为行驶速度超过速度阈值的情况下,进入s232,设定为进一步增强视频内容ctv的显示限制的第二任务模式dmr3,并进入s233。
199.在s233中,判定是否使第二任务模式结束。在s233中,判定为第二任务模式的继续的情况下,返回到s222,使视频内容ctv等的提供继续。另一方面,在s233中,判定为使第二任务模式结束的情况下,进入s234。在s234中,将cid22的画面从第二任务模式切换为通常模式,并结束一系列的内容控制处理。
200.接下来,进一步基于图35,并参照图17,对控制第二任务的允许范围的第二实施方式的范围控制处理的详细进行说明。
201.在s241中,基于拥堵判定部72对拥堵模式的判别结果,掌握本车周围的拥堵模式,并进入s242。在s242中,与内容控制处理的s228(参照图34)相同地,判定是否在追尾风险容易提高的特定模式的拥堵中。具体而言,在s242中,判定为本车周围的拥堵符合作为特定模式的模式a~d、f中的任意一个的情况下,进入s243。在s243中,较窄地设定第二任务的允许范围,并结束这次的范围控制处理。另一方面,在s242中,判定为本车周围的拥堵不符合模式a~d、f中的任意一个,即在非特定模式的拥堵中的情况下,进入s244。在s244中,较宽地设定第二任务的允许范围,并结束这次的范围控制处理。
202.以上的结果是,根据由后方掌握部76掌握到的后方车ab的状况,变更对驾驶员许可的第二任务的允许范围。具体而言,在追尾风险较高的特定模式的拥堵中,不许可用户终端的操作以及进食等行为。与此相对,在追尾风险较低的非特定模式的拥堵中,许可用户终端的操作以及进食等行为。
203.在到此为止进行了说明的第二实施方式中,也实现与第一实施方式相同的效果,能够对驾驶员通知相邻车ad的插入产生的预测。其结果是,能够使在通过自动驾驶功能在拥堵中行驶的期间的驾驶员减轻不安。
204.除此之外,在第二实施方式中,在通过自动驾驶功能在拥堵中行驶时,根据在本车的后方行驶的后方车ab的状况,限制提供的视频内容ctv的显示。因此,能够通过在提供中的视频内容ctv中产生的显示变化,向驾驶员通知来自后方的追尾的风险。根据这样的通知,在通过自动驾驶功能在拥堵中行驶时,不容易给予驾驶员不安。
205.另外,在第二实施方式中,在通过自动驾驶功能在拥堵中行驶时,若判定为是后方车ab的追尾风险容易提高的特定的拥堵模式,则限制提供给驾驶员的视频内容ctv的显示。因此,能够通过在提供中的内容中产生的显示变化,对驾驶员通知后方车ab的追尾风险。根据这样的通知,在通过自动驾驶功能在拥堵中行驶时,不容易给予驾驶员不安。
206.并且,在第二实施方式中,在通过自动驾驶功能在拥堵中行驶时,根据在本车的后方行驶的后方车ab的状况,变更对驾驶员许可的第二任务的允许范围。因此,在有来自后方的追尾的风险时,能够通过允许范围的变化,不许可容易感到不安的第二任务。其结果是,在通过自动驾驶功能在拥堵中行驶时,不容易给予驾驶员不安。
207.除此之外,在第二实施方式中,在由拥堵判定部72判定为在拥堵中的情况下,提供控制部77判定行驶中的车道是否为与合流或者分支等相关联的风险区间ser。而且,提供控制部77在本车在风险区间ser行驶的拥堵模式d(参照图7以及图27)那样的场景的情况下,继续视频内容ctv的显示的限制。在拥堵中的风险区间ser,与没有合流、分支等的通常区间相比,容易产生相邻车ad的插入。因此,根据追加判断容易产生插入的道路环境的处理,并继续插入可能性较高的状态的报告,能够进一步减轻驾驶员的不安。
208.另外,在第二实施方式中,在由拥堵判定部72判定为在拥堵中的情况下,提供控制部77判定行驶中的道路是否为单侧单车道的道路(参照图28)。而且,提供控制部77在本车在单侧单车道的道路上行驶的情况下,中止视频内容ctv的显示限制。在单侧单车道的道路上,即使在拥堵中,也不会产生插入。因此,根据在单侧单车道的道路上中止限制视频内容ctv的显示、也就是说插入的报告的处理,自动驾驶时的驾驶员的便利性能够提高。
209.并且,在第二实施方式中,在掌握不到与本车在同一车道上行驶的后方车ab的情况下,与掌握到后方车ab的情况相比,较窄地设定对驾驶员许可的第二任务允许范围。即,提供控制部77在掌握不到与本车在同一车道上行驶的后方车的情况下,与掌握到后方车ab的情况相比,更加限制视频内容ctv的显示。在本车的后方范围挤满后方车ab的情况下,与后方范围空闲的情况相比,来自后方的追尾风险降低。因此,若在掌握到在后方车ab的情况下,扩大第二任务的许可范围或者缓和视频内容ctv的显示限制,则能够实现自动驾驶中的追尾风险与便利性的兼得。
210.另外,如上述那样,在第二实施方式中,拥堵模式a~d、f相当于“特定模式”的拥堵,其以外的拥堵模式e、g、h、j、k相当于“非特定模式”的拥堵。
211.(其它的实施方式)
212.以上,对本公开的多个实施方式进行了说明,但本公开并不限定于上述实施方式来进行解释,能够在不脱离本公开的主旨的范围内应用于各种实施方式以及组合。
213.在上述实施方式中,在“强”、“中”、“弱”三个阶段中切换娱乐系的内容的显示限制。但是,显示限制的程度也可以在两个阶段中切换,或者也可以在设定为四个阶段以上中切换。并且,也可以简单地实施是否进行显示限制的切换。
214.例如,在上述第一实施方式的变形例1、2中,能够省略基于特定模式的拥堵判定的显示限制。变形例1的提供控制部77在探测到插入的实施预兆的情况下,设为将显示限制设为“弱”的第二任务模式,在判定为在插入实施中的情况下,设为将显示限制设为“强”的第二任务模式。并且,变形例2的提供控制部77在探测到插入的实施预兆的情况下,限制视频内容ctv的显示,在未探测到插入的实施预兆的情况下,不限制视频内容ctv的显示。
215.另外,在上述第一实施方式的变形例3、4中,能够省略基于插入的实施预兆的探测的显示限制。变形例3的提供控制部77在判定为在特定模式的拥堵中的情况下,设为将显示限制设为“弱”的第二任务模式,在判定为在插入实施中的情况下,设为将显示限制设为“强”的第二任务模式。并且,变形例4的提供控制部77在判定为在特定模式的拥堵中的情况下,限制视频内容ctv的显示,在判定为在非特定模式的拥堵中的情况下,不限制视频内容ctv的显示。如以上那样,在增强内容的显示限制的处理中包含有将限制从关闭切换为打开的处理、和增强较弱的限制的处理。
216.并且,在上述第一实施方式的变形例5中,在判定为在特定模式的拥堵中的情况、和探测到插入的实施预兆的情况下,进行同等程度的显示限制。作为一个例子,提供控制部77基于特定模式的拥堵中判定或者插入预测,设为将显示限制设为“弱”的第二任务模式。
217.并且,在上述实施方式的变形例6中,能够省略基于插入的实施中判定的显示限制。提供控制部77在判定为在特定模式的拥堵中的情况下,设为将显示限制设为“弱”的第二任务模式,在探测到插入的实施预兆的情况下,设为将显示限制设为“强”的第二任务模式。
218.在上述实施方式的变形例7中,能够根据拥堵中的行驶速度,多阶段或者连续地调整内容的显示限制。具体而言,拥堵中的行驶速度越高,提供控制部77越使插入预测通知mwf(参照图10)的显示面积(例如,纵向宽度)扩大,越缩小视频内容ctv的显示面积。
219.在上述实施方式的变形例8中,能够省略与拥堵中的行驶速度对应的内容的显示限制。另外,在上述实施方式的变形例9中,能够省略基于拥堵模式的判别结果,调整第二任务的允许范围的处理。
220.上述第二实施方式的变形例10的提供控制部77根据在拥堵中掌握的后方车ab的状况,在从“无”到“强”之间切换视频内容ctv的限制。另外,在上述第二实施方式的变形例11中,即使在单侧单车道的道路上行驶的情况下,在判定为在拥堵中的情况下,也稍微对视频内容ctv施加显示限制。
221.在上述第二实施方式中,在追尾风险较低的非特定模式的拥堵中的情况下,使视频内容ctv的限制为“无”以及“弱”中的任意一个。另一方面,在变形例12中,视频内容ctv的限制仅为“无”以及“弱”中的任意一方。
222.在上述实施方式的变形例13中,通过综合状态估计部75获取表示驾驶席的靠背部
分的相对于左面部分的后倾角度的信息,作为倾斜信息。综合状态估计部75掌握驾驶席的倾斜的状态。在综合状态估计部75中设定有使靠背部分后倾进行放松,来作为第二任务的一个种类。
223.在这样的变形例13中,提供控制部77在扩大第二任务的允许范围时,许可使驾驶席倾斜的状态。另一方面,提供控制部77在缩小第二任务的允许范围时,不许可使驾驶席倾斜的状态。若根据拥堵模式的迁移,而驾驶席的倾斜脱离允许范围,则提供控制部77通过基于音频装置24的声音消息,催促驾驶员立起靠背部分。
224.在上述实施方式的变形例14中,通过驾驶员监视器29检测驾驶员的视线方向。综合状态估计部75判定驾驶员的视线方向是否朝向提供娱乐系的内容的显示设备(例如,cid22等)。提供控制部77在驾驶员的视线方向未朝向cid22的情况下,不实施基于cid22的中断要求通知mwr的显示,仅实施基于声音消息的注意提醒。并且,提供控制部77能够使用设置于驾驶席以及脚垫等的振动设备,提醒驾驶员注意实施允许范围外的第二任务。
225.上述实施方式的提供控制部77基于与相邻车ad向本车前方的插入相关的信息,使娱乐系的内容的显示限制有效化。但是,提供控制部77也可以使用与相邻车ad向本车后方的插入相关的信息,实施内容的显示限制。除此之外,在掌握本车后方的状况的情况下,也可以与向驾驶员的报告或者注意提醒一起实施向后方车ab传达拥堵的危险控制。并且,提供控制部77也可以基于与相邻车ad向前行车的前方的插入相关的信息,实施内容的显示限制。
226.在上述实施方式的自动驾驶系统50中设置有驾驶辅助ecu50a以及自动驾驶ecu50b这两个车载ecu。但是,也可以由具备驾驶辅助ecu50a以及自动驾驶ecu50b的各功能的一个车载ecu构建自动驾驶系统50。
227.显示与第二任务相关的内容的显示设备并不限定于cid22。例如,仪表显示器21以及hud23可以用于内容的提供。并且,电子镜系统的各显示器emb、eml、emr可以用于内容的提供。另外,也可以能够由驾驶员选择使内容显示的显示设备。除此之外,可以适当地变更显示于各显示设备的各图像的形状、发光颜色、显示位置等。另外,可以基于驾驶员等的用户设定、以及使用车辆am的国家以及地区等的设定,适当地变更显示于各显示设备的消息的语言的种类。同样地,也可以适当地变更通过音频装置24播放的声音消息的语言的种类。
228.可以根据使用车辆am的国家以及地区的道路交通法等法规,适当地变更对驾驶员许可的第二任务。并且,避免第二任务的中断的避免行动并不限定于自动lc,可以根据行驶场景来适当地变更。
229.在上述实施方式的变形例15中,仪表显示器21、cid22以及hud23的任意一个与hcu100一体构成。换句话说,hcu100的处理功能安装于任意一个显示设备的控制电路。在这样的变形例10中,包含hcu100的处理功能的显示设备相当于“提示控制装置”。
230.在上述实施方式中,也能够通过软件以及执行该软件的硬件、仅通过软件、仅通过硬件、或者通过它们的复合的组合来提供由hcu100提供的各功能。并且,在通过作为硬件的电子电路提供这样的功能的情况下,也能够通过包含许多的逻辑电路的数字电路或者模拟电路提供各功能。
231.另外,也可以适当地变更存储能够实现上述的提示控制方法的程序等的存储介质(非临时有形计算机读取介质,non-transitory tangible storage medium)的方式。例如,
存储介质并不限定于设置在电路基板上的构成,可以构成为以存储卡等方式提供,插入到插口部并与hcu的控制电路电连接。并且,存储介质也可以是成为向hcu的程序的复印基础的光盘以及硬盘驱动器等。
232.也可以通过构成被编程为执行通过计算机程序具体化的一个或者多个功能的处理器的专用计算机实现本公开所记载的控制部及其方法。或者,也可以通过专用硬件逻辑电路实现本公开所记载的装置及其方法。或者,也可以由通过执行计算机程序的处理器与一个以上的硬件逻辑电路的组合构成的一个以上的专用计算机实现本公开所记载的装置及其方法。另外,计算机程序也可以作为通过计算机执行的指令,存储于计算机能够读取的非过渡有形记录介质。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。