1.本实用新型涉及机械手技术领域,更具体地,涉及一种可稳定抓取透气软性材料的机械爪。
背景技术:
2.目前针对无纺布,布料,海绵等具有透气性的软性材料的抓取没有很好的解决方案,本实用新型 不仅能有效抓取,而且可以保证在整沓材料中只抓取上面的第一片材料,对下层材料保证进行有效剥离。
技术实现要素:
3.为此,本实用新型通过合理地调整机械传动机构之间的配合,简化了用于抓取透气软性材料机械爪的结构形式,同时具有零部件较少、单体零部件结构强度高、连接强度较高的特点。
4.为了实现上述目的,本实用新型采用的具体技术方案为:
5.本实用新型所述的可稳定抓取透气软性材料的机械爪,包括本体、驱动机构轴心、及多个爪子;所述驱动机构轴心与本体可伸缩连接;所述爪子与本体可翻转连接,并与驱动机构轴心连接;所述驱动机构轴心在本体上做伸缩运动,带动爪子在本体上翻转,以实现爪子的展开和收拢动作。
6.优选地,所述驱动机构包括驱动机构轴心和中心拔轮;中心拔轮与爪子连接,用于带动爪子做翻转运动。
7.优选地,所述本体设有爪子安装孔;中心拔轮与爪子安装孔可伸缩配合。
8.优选地,所述中心拔轮设有环形滑槽;所述爪子包括爪子滑柱、及爪子内孔;所述本体上设有爪子轴心和爪子槽位;所述爪子轴心固定地设于本体,所述爪子轴心与爪子内孔套接,所述爪子滑柱与环形滑槽卡接,并且环形滑槽槽体空间超过爪子滑柱体积。
9.优选地,所述本体设置成圆柱形结构;所述爪子安装孔设置成圆柱形,所述中心拔轮对应于爪子安装孔设置成圆柱形。
10.优选地,所述中心拔轮沿周向于侧壁上设置环形的环形滑槽。
11.优选地,所述本体侧壁上设有环形的安装槽,所述爪子轴心固定地设于该安装槽。
12.优选地,所述机械爪还包括一个能够盖住本体顶部的外盖;所述外盖上设有外盖爪槽。
13.优选地,所述爪子整体设置成l形;所述l形结构一端设置成爪子滑柱,另一端设置成爪指端;所述l形结构的拐弯处设置爪子内孔。
14.优选地,所述爪指端设有三个尖锐爪。
15.本实用新型与现有技术相比,具有以下有益效果:
16.本实用新型公开了一种可稳定抓取透气柔性材料的机械爪,包括驱动装置、本体、中心拨轮、爪子、爪子轴心和顶盖。驱动装置通过驱动机构轴心与中心拨轮连接,中心拨轮
的外径设有环形滑槽,爪子通过爪子轴心安装在环形滑槽内。当驱动装置上行时,带动中心拨轮上行,最后实现爪子的展开运动;同理的,当驱动装置下行时,带动中心拨轮下行,最后实现爪子的收拢运动。所述的爪子展开和收拢运动实现了对材料的释放和抓取功能,爪子收拢时,末端轻微扎进材料里面,使材料轻微变形,可以保证牢固地抓取材料的同时也剥离了下层材料,当爪子展开时,爪子末端离开材料,材料释放。实施起来非常简单,适合所有的透气的、柔性的材料。
17.下面结合附图对本实用新型作进一步的说明。
附图说明
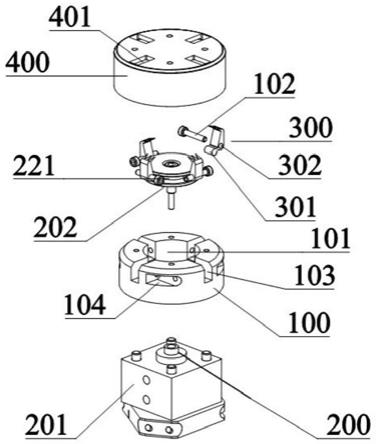
18.图1为本实用新型优选实施方式中机械爪分解结构示意图。
19.图2为本实用新型优选实施方式中机械爪子示意图。
20.附图标记说明:
21.100本体、101爪子安装孔、102爪子轴心、103爪子槽位、104安装槽、200驱动机构轴心、201驱动机构、202中心拔轮、221环形滑槽、300爪子、301爪子滑柱、302爪子内孔、303爪指端、400外盖、401外盖爪槽。
具体实施方式
22.下面通过具体实施方式对本实用新型做进一步的解释及说明,应当理解下面的实施方式的目的是为了使本实用新型的技术方案更加清楚、易于理解,并不限制权利要求的保护范围。
23.本实用新型所述的可稳定抓取透气软性材料的机械爪,如图1、2所示,包括本体100、驱动机构轴心200、及多个爪子300;所述驱动机构轴心200与本体100可伸缩连接;所述爪子300与本体100可翻转连接,并与驱动机构轴心200连接;所述驱动机构轴心200在本体100上做伸缩运动,带动爪子300在本体100上翻转,以实现爪子300的展开和收拢动作。
24.在优选实施方式中,所述驱动机构201包括驱动机构轴心200和中心拔轮202;中心拔轮202与爪子300连接,用于带动爪子300做翻转运动。
25.在优选实施方式中,所述本体100设有爪子安装孔101;中心拔轮202与爪子安装孔101可伸缩配合。
26.在优选实施方式中,所述中心拔轮202设有环形滑槽221;所述爪子300包括爪子滑柱301、及爪子内孔302;所述本体100上设有爪子轴心102和爪子槽位103;所述爪子轴心102固定地设于本体100,所述爪子轴心102与爪子内孔302套接,所述爪子滑柱301与环形滑槽221卡接,并且环形滑槽221槽体空间超过爪子滑柱301体积。
27.在优选实施方式中,所述本体100设置成圆柱形结构;所述爪子安装孔101设置成圆柱形,所述中心拔轮202对应于爪子安装孔101设置成圆柱形。
28.在优选实施方式中,所述中心拔轮202沿周向于侧壁上设置环形的环形滑槽221。
29.在优选实施方式中,所述本体100侧壁上设有环形的安装槽104,所述爪子轴心102固定地设于该安装槽104。
30.在优选实施方式中,如图2所示,所述机械爪还包括一个能够盖住本体100顶部的外盖400;所述外盖400上设有外盖爪槽401。
31.在优选实施方式中,所述爪子300整体设置成l形;所述l形结构一端设置成爪子滑柱301,另一端设置成爪指端303;所述l形结构的拐弯处设置爪子内孔302。
32.在优选实施方式中,所述爪指端303设有三个尖锐爪。
33.下面通过具体实施例对本实用新型作进一步的说明。
实施例
34.本实施例提供了一种可稳定抓取透气软性材料的机械爪,包括本体100、气缸、及爪子300。气缸包括驱动机构轴心200和中心拔轮202。中心拔轮202与爪子300连接,用于带动爪子300做翻转运动。本体100设有爪子安装孔101,中心拔轮202与爪子安装孔101可伸缩配合。中心拔轮202在爪子安装孔101内可以做伸缩运动。
35.需要说明的是,本技术中所述透气软性材料可以是无纺布、布料、海绵等柔性且可透气性材料。
36.需要说明的是,本技术中所述驱动机构,可以是气缸,也可以是电动马达,优选气缸。
37.中心拔轮202设有环形滑槽221,爪子300包括爪子滑柱301、及爪子内孔302,本体100上设有爪子轴心102和爪子槽位103。爪子滑柱301卡入环形滑槽221,并且爪子滑柱301并非与环形滑槽221槽体空间完全吻合。环形滑槽221提供给爪子滑柱301一定的活动空间,并且该活动空间需要保证爪子滑柱301在运动过程中不会脱离环形滑槽221。
38.爪子轴心102固定地设于本体100,爪子轴心102与爪子内孔302套接。爪子内孔302能够绕爪子轴心102做翻转运动。
39.具体实现方式为:
40.中心拔轮202在爪子安装孔101内向上运动时,通过环形滑槽221对爪子滑柱301施力,向上拨动爪子滑柱301。爪子滑柱301受力,使爪子内孔302绕爪子轴心102向外翻转。此时,爪子300整体做向外展开的动作。在此状态下,可以释放透气软性材料。
41.中心拔轮202向下运动时,向下拨动爪子滑柱301。使爪子内孔302绕爪子轴心102向内做翻转运动。此时,爪子300整体做向内收拢的动作。在此状态下,可以抓取透气软性材料。通过抓取和释放动作,机械爪能够将透气软性材料移动至预定位置。
42.具体地,本体100设置成圆柱形结构。
43.具体地,爪子安装孔101设置成圆柱形,与之对应的,中心拔轮202设置成圆柱形。
44.更具体地,中心拔轮202沿周向于侧壁上设置环形的环形滑槽221。这样环形滑槽221一体成型于中心拔轮202,不仅结构强度高,并且加工方便,节省生产成本。
45.具体地,本体100侧壁上设有环形的安装槽104。爪子轴心102固定地嵌入安装槽104。这样不会使爪子轴心102外露,避免刮碰等情况的发生,同时也有结构牢固,整洁的技术效果。
46.此外,机械爪还包括一个能够盖住本体100顶部的外盖400。外盖400与本体100顶部扣合连接,并通过螺栓固定连接。通过外盖400盖住本体100顶部,避免了气缸中心拔轮202和大部分爪子300直接与外部接触,有效保护机械爪内部结构。
47.具体地,外盖400上设有外盖爪槽401,外盖爪槽401的位置对应于爪子300设置,用于在爪子300翻转后,使抓结构的翻转端露出,以能够抓取透气软性材料。
48.具体地,爪子300整体设置成l形。l形结构一端设置成爪子滑柱301,另一端设置成爪指端303。在l形结构的拐弯处设置爪子内孔302。
49.具体地,爪指端303设有三个尖锐爪。尖锐爪可以更牢固的抓住透气软性材料。实际使用时,尖锐爪会插入透气软性材料表层,以实现更加牢固的抓取效果。
50.当然,爪指端303的具体爪指数、以及具体形状可以根据实际使用情况选择,并不限于上述具体结构。例如,可以设置1根、5根或其他数量的爪指。再如,可以将爪指设置成针状、锯齿状、甚至是楔形端。只要能够根据透气软性材料性质,实现抓取效果,其他常规的爪指数量和形状的设置,都是可以的。
51.本实用新型是通过实施例来描述的,但并不对本实用新型构成限制,参照本实用新型的描述,所公开的实施例的其他变化,如对于本领域的专业人士是容易想到的,这样的变化应该属于本实用新型权利要求限定的范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
