水平多关节型机器人
1.本技术是优先权日为2016年5月26日、2017年2月16日、申请日为2017年5月10日、申请号为201710327785.7、发明名称为“水平多关节型机器人”的发明专利申请的分案申请,其全部内容结合于此作为参考。
技术领域
2.本发明涉及水平多关节型机器人。
背景技术:
3.在工业领域等中使用有水平多关节型机器人。使水平多关节型机器人与控制装置(控制器)连接,并由该控制装置控制。作为水平多关节型机器人的一例,存在scalar机器人。
4.以往,使水平多关节型机器人与控制装置配置在分离的位置(例如,参照专利文献1。)。
5.现有专利文献
6.专利文献
7.专利文献1:日本特开2011-177845号公报
8.然而,在使水平多关节型机器人与控制装置配置在分离的位置的构成中,存在用于配置水平多关节型机器人和控制装置的设置面积(占用空间)会变大的情况,并存在设置场所会被制约的情况。
技术实现要素:
9.为了解决上述技术问题的至少一个,本发明的一方式是一种水平多关节型机器人,具备:基台;第一臂,设于所述基台;以及控制装置,控制所述第一臂,所述控制装置的至少一部分位于所述基台的内部。
10.根据该构成,在水平多关节型机器人中,控制设置于基台的第一臂的控制装置的至少一部分位于该基台的内部。由此,在水平多关节型机器人中,能够缩小占用空间。
11.本发明的一方式可以使用如下构成:在水平多关节型机器人中,所述第一臂以能够绕第一旋转轴旋转的方式直接或间接地设于所述基台,所述水平多关节型机器人还具备第一壳体,从所述第一旋转轴的轴向观察,所述第一壳体具有与所述基台重叠的部分。
12.根据该构成,在水平多关节型机器人中,从第一臂的第一旋转轴的轴向观察,具备具有与基台重叠的部分的第一壳体。由此,在水平多关节型机器人中,能够在第一壳体的内部收纳控制装置等的构成部,能够缩小占用空间。
13.本发明的一方式可以使用如下构成:在水平多关节型机器人中,所述控制装置具有向驱动所述第一臂的第一驱动部供给电源的电源基板,所述电源基板的至少一部分位于所述第一壳体的内部。
14.根据该构成,在水平多关节型机器人中,向驱动第一臂的第一驱动部供给电源的
电源基板的至少一部分位于第一壳体的内部。由此,在水平多关节型机器人中,能够将电源基板的至少一部分收纳在第一壳体的内部,能够缩小占用空间。
15.本发明的一方式可以使用如下构成:在水平多关节型机器人中,所述控制装置具有控制所述第一驱动部的控制基板,所述控制基板位于所述基台的内部。
16.根据该构成,在水平多关节型机器人中,控制第一驱动部的控制基板位于基台的内部。由此,在水平多关节型机器人中,能够将控制基板收纳在基台的内部,能够缩小占用空间。
17.本发明的一方式可以使用如下构成:在水平多关节型机器人中,所述第一驱动部位于所述第一壳体的内部。
18.根据该构成,在水平多关节型机器人中,第一驱动部位于第一壳体的内部。由此,在水平多关节型机器人中,能够将第一驱动部收纳在第一壳体的内部,能够缩小占用空间。
19.本发明的一方式可以使用如下构成:在水平多关节型机器人中,所述第一驱动部具有电动机和放大器部,所述放大器部具有驱动所述电动机的驱动电路,所述放大器部设于所述电动机。
20.根据该构成,在水平多关节型机器人中,具有驱动电动机的驱动电路的放大器部设置于该电动机。由此,在水平多关节型机器人中,能够使放大器部和电动机一体化,并缩短连接它们的布线。
21.本发明的一方式可以使用如下构成:在水平多关节型机器人中,所述水平多关节型机器人还具备设于所述第一壳体的显示部。
22.根据该构成,在水平多关节型机器人中,具备设置于第一壳体的显示部。由此,在水平多关节型机器人中,能够由该显示部显示信息。
23.本发明的一方式可以使用如下构成:在水平多关节型机器人中,所述显示部位于所述第一壳体的正面。
24.根据该构成,在水平多关节型机器人中,显示部位于第一壳体的正面。由此,在水平多关节型机器人中,能够易于从第一壳体的正面观察由该显示部显示的信息。
25.本发明的一方式可以使用如下构成:在水平多关节型机器人中,从所述第一旋转轴的轴向观察,所述显示部具有位于所述第一臂的可动区域内的部分。
26.根据该构成,在水平多关节型机器人中,从第一旋转轴的轴向观察,显示部具有位于第一臂的可动区域内的部分。由此,在水平多关节型机器人中,能够易于从观察这样的第一臂的可动区域的方向观察由该显示部显示的信息。
27.本发明的一方式可以使用如下构成:在水平多关节型机器人中,所述显示部的设于所述第一壳体的位置能够变更。
28.根据该构成,在水平多关节型机器人中,显示部的设置于第一壳体的位置能够变更。由此,在水平多关节型机器人中,通过变更显示部的位置,从而能够根据使用状况使由该显示部显示的信息易于观察。
29.本发明的一方式可以使用如下构成:在水平多关节型机器人中,所述第一壳体具有开口部。
30.根据该构成,在水平多关节型机器人中,第一壳体具有开口部。由此,在水平多关节型机器人中,由第一壳体具有的开口部能够进行散热。
31.本发明的一方式可以使用如下构成:在水平多关节型机器人中,所述水平多关节型机器人还具备:第二臂,设于所述第一臂,并能够绕第二旋转轴旋转;以及保护部件,连接所述第一壳体与所述第二臂。
32.根据该构成,在水平多关节型机器人中,具备连接设置于第一臂并能够绕第二旋转轴旋转的第二臂和第一壳体的保护部件。由此,在水平多关节型机器人中,能够在保护部件的内部收纳布线。
33.本发明的一方式可以使用如下构成:在水平多关节型机器人中,所述第一壳体与所述保护部件的第一连接位置和所述第二臂与所述保护部件的第二连接位置在所述第一旋转轴的轴向上的位置相同。
34.根据该构成,在水平多关节型机器人中,第一壳体与保护部件的第一连接位置和第二臂与该保护部件的第二连接位置在第一旋转轴的轴向上的位置相同。由此,在水平多关节型机器人中,能够降低收纳于保护部件的内部的布线的断线的风险。
35.本发明的一方式可以使用如下构成:在水平多关节型机器人中,所述第一连接位置位于所述第一旋转轴的轴上。
36.根据该构成,在水平多关节型机器人中,第一连接位置位于第一旋转轴的轴上。由此,在水平多关节型机器人中,由第一壳体与保护部件的第一连接位置位于第一旋转轴的轴上的配置而能够在该保护部件的内部收纳布线。
37.如这样,根据本发明的水平多关节型机器人,控制设置于基台的第一臂的控制装置的至少一部分位于该基台的内部。由此,在本发明的水平多关节型机器人中,能够缩小占用空间。
附图说明
38.图1是示出包含本发明的一实施方式的水平多关节型机器人的机器人系统的概略的构成例的立体图。
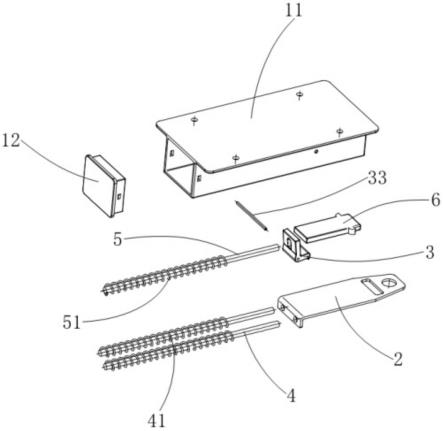
39.图2是示出本发明的一实施方式的水平多关节型机器人的基台的概略的构成例的立体图。
40.图3是示出本发明的一实施方式的水平多关节型机器人的壳体的概略的构成例的立体图。
41.图4是示出本发明的一实施方式的水平多关节型机器人的盖板的概略的构成例的立体图。
42.图5是示出本发明的一实施方式的水平多关节型机器人的控制系统的概略的构成例的图。
43.图6是示出本发明的一实施方式的水平多关节型机器人中的基板的配置的概略的构成例的图。
44.图7是示出本发明的一实施方式的水平多关节型机器人中的配管的配置的概略的构成例的图。
45.图8是示出本发明的一实施方式的水平多关节型机器人的变形例(第一变形例)的概略的构成例的图。
46.图9是示出本发明的一实施方式的水平多关节型机器人的变形例(第二变形例)的
概略的构成例的图。
47.图10是示出本发明的一实施方式的水平多关节型机器人的壳体中的显示部的配置的概略的构成例的图。
48.图11是示出本发明的一实施方式的水平多关节型机器人的壳体中的显示部的配置与第一臂的可动区域的关系的一例的图。
49.图12是示出本发明的一实施方式的水平多关节型机器人的壳体中的显示部的配置的变形例的概略的构成例的图。
50.图13是示出本发明的一实施方式的水平多关节型机器人的壳体中的具有显示部的盖板的概略的构成例的图。
51.附图标记说明:
52.1机器人系统;11、511、611水平多关节型机器人;12对象物;31、531、631基台;32、532、632、811壳体;33、33-2、33-3、533、633臂(第一臂);34、534、634臂(第二臂);35、535、635动作部;41、641、861盖板;46、862螺丝;51、551配管;71、571、671灯;91、92开口部;111、112、231、232板部;131、132、251、252、311、312、886螺丝孔;211孔部;411电源;421控制装置;430电源基板;431驱动电源基板;432电源转换基板;433、591、691控制基板;451-1~451-3电动机控制基板;452-1~452-3编码器;453-1~453-3、592、692放大器部;471-1~471-3、593、693电动机;711、871显示部;761旋转轴的位置;881框部;882基板;a1、a2连接位置;h1基准线;a、a11、b、d1~d6、d11、d21、e1~e3、e11~e12、f1、g1~g4、g11~g12、i1、i11面;c1~c4、c11~c14、c21、c31~c34、c41~c43、c51、c101~c102、c111~c112边。
具体实施方式
53.参照附图对本发明的实施方式进行详细说明。
54.并且,在以下的实施方式中,“平行”、“垂直”、“相同(或同一)”、“相等”等的用词也包括例如起因于设计误差或者制造误差等而稍微错位的情况。也就是说,“平行”、“垂直”、“相同(或同一)”、“相等”等的形态分别包括“大致平行”、“大致垂直”、“大致相同(或大致同一)”、“大致相等”等的形式。
55.机器人系统的概要
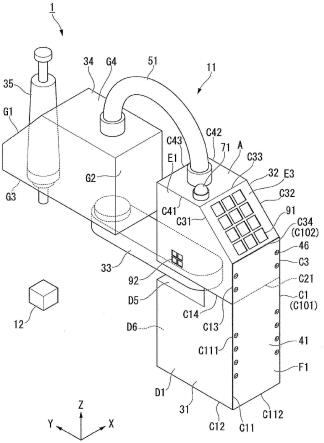
56.图1是示出包含本发明的一实施方式的水平多关节型机器人11的机器人系统1的概略的构成例的立体图。
57.图2是示出本发明的一实施方式的水平多关节型机器人11的基台(base)31的概略的构成例的立体图。
58.图3是示出本发明的一实施方式的水平多关节型机器人11的壳体32的概略的构成例的立体图。
59.图4是示出本发明的一实施方式的水平多关节型机器人11的盖板41的概略的构成例的立体图。
60.在图1~图4中为了方便说明示出了作为三维正交坐标系的xyz坐标系。在图2、图3、图4中分别以结合图1所示的水平多关节型机器人11的配置的朝向示出了基台31、壳体32、盖板41。
61.在本实施方式中,xyz坐标系中的各自的坐标轴的箭头表示各自的轴的从负朝向
正的方向。关于各自的轴,箭头的朝向示出从负向正的朝向,且与箭头相反的朝向示出从正向负的朝向。
62.机器人系统1具备水平多关节型机器人11和对象物12。此外,也能够理解为机器人系统1不具备对象物12,也就是说,也可以理解为对象物12是机器人系统1的外部的对象物。
63.在本实施方式中,水平多关节型机器人11将对象物12作为成为处理的对象的物体,进行动作。
64.在此,对象物12可以是任意的物体,例如,可以为不是生物体的物体(非生物体),或也可以是生物体。
65.另外,在图1的例子中,示出了一个对象物12,但也可以使用多个对象物12。
66.水平多关节型机器人的概要
67.水平多关节型机器人11具备基台31、壳体32、臂(以下,也称为“第一臂”。)33、臂(以下,也称为“第二臂”。)34、动作部35和配管51。
68.概略地,基台31和壳体32由盖板41固定,第一臂33相对于基台31以能够旋转地方式设置,第二臂34相对于第一臂33以能够旋转地方式设置,动作部35相对于第二臂34以能够直线运动地方式设置。另外,配管51的一端与壳体32连接,该配管51的其它一端(另一端)连接于第二臂34。此外,动作部35进一步地也能够旋转。另外,作为其它构成例,动作部35也可以是不能够直线运动而能够旋转的构成。
69.基台的概要
70.在本实施方式中,基台31是直接地支承第一臂33的构成部。并且,作为其它构成例,基台31也可以是间接地支承第一臂33的构成部。
71.作为外形,基台31具有大致长方体(或也可以是立方体。)的形状,包含板状的面d1~d6而构成,且为空心。基台31如此作为外形,具有大致长方体的形状,但在面向一个面d5观察的情况下,具有包含整个一边(与边c21对应的边)的部分(一部分)所突起的形状。基台31在该突起的部分中的突起方向的面d3具有两个螺丝孔131。另外,在基台31中,包括该所突起的部分所包含的该一边c21的其余的面(也就是说,面d1~d3以外的面)大致开口,并在与该一边c21的两端的各自相连的边c1、c11具备沿该边c1、c11的板状的部分(板部)111。板部111沿各自的该边c1、c11具有四个螺丝孔132(两个边c1、c11共计八个螺丝孔132)。另外,在基台31中,与该所突起的部分中的突起方向的面d3相对的面也大致开口,并在与该边c1、c11相连的边c2、c12具备沿该边c2、c12的板状的部分(板部)112。
72.并且,在本实施方式中,关于基台31,仅在两个螺丝孔131之中的一方标注有附图标记,仅在两个板部111之中的一方标注有附图标记,仅在四个螺丝孔132(两个板部111共计八个螺丝孔132)之中的一个标注有附图标记,仅在两个板部112之中的一方标注有附图标记。
73.在此,在图示的例子中,基台31由与x轴、y轴、z轴分别平行的边构成,所突起的部分在z轴的正的方向突起,在面向与xy平面平行的面d5观察的情况下,该所突起的部分是包含位于y轴的负的方向的与x轴平行的整个一边(与边c21对应的边)的部分,两个螺丝孔131沿该一边c21配置,并使该两个螺丝孔131相对于该一边c21的中点(通过该中点的与z轴平行的线)而在x轴的正的方向与负的方向配置于对称的位置。另外,在图示的例子中,使两个板部111以及设置于各自的板部111的八个螺丝孔132相对于该一边c21的中点(通过该中点
的与z轴平行的线)而在x轴的正的方向与负的方向配置于对称的位置。
74.另外,在图示的例子中,面d1与面d2平行地相对,设置有板部111的一侧的开口的面与面d6平行地相对,设置有板部112的一侧的开口的面与面d3以及面d5的各自平行地相对。另外,面d3相对于面d5在z轴的正的方向突起,面d3与面d5由面d4连接。
75.壳体的概要
76.作为外形,壳体32在相对于构成长方体(或也可以是立方体。)的彼此相对的两个面(与面e1、e2对应的面)垂直的方向具有以除去它们两个面的各自中的包含一个顶点的三角形的部分的方式而切掉了的形状的面(五角形的面e1、e2)。在此,可以不必由切掉该部分的加工来构成将该部分切掉了的形状的面(五角形的面e1、e2),例如,也可以从最初由形成同样的形状的加工来构成。壳体32作为外形具有这样的多面体的形状,构成为包含板状的面e1~e3、a、b,且为空心。
77.此外,如这样在本实施方式中示出壳体32具备具有将该部分(例如,角的部分)切掉了的形状的面(五角形的面e1、e2)的情况,但作为其它构成例,壳体32可以具有任意的形状,例如,也可以具备具有任意的形成的面来代替本实施方式中的具有将该部分(例如,角的部分)切掉了的形状的面(五角形的面e1、e2)。
78.壳体32具有彼此相对的两个五角形状的面e1、e2,各自的五角形具有如下形状:具有线状的边c31、c32(在以下,也称为“斜边”。),该线状的边c31、c32连接长方形(或也可以是正方形。)的邻接的两个边(两个边c41、c13,或两个边c42、c3)的各自的中途的点。另外,壳体32具有面e3(在以下,也称为“斜面”。)、面a和面b,该面e3相对于两个五角形状的面e1、e2垂直并包含两个斜边c31、c32,该面a相对于两个五角形状的面e1、e2垂直并在各自的五角形中包含与斜边c31、c32相连的边c41、c42,该面b相对于两个五角形状的面e1、e2垂直并包含与各自的五角形中的边c41、c42相连的边c43。
79.斜面e3和面a具有公共的边c33。斜面e3的其余的一边c34的一侧为空心。
80.另外,壳体32关于与斜面e3相连的五角形以外的面、与面a相反侧的面大致开口,并在与该斜面e3相连的两个边c3、c13具备沿该边c3、c13的板状的部分(板部)231。板部231沿该边c3、c13具有两个螺丝孔251。另外,壳体32关于包含与该边c3、c13相连的边c4、c14的其余的面也大致开口,并具备沿该边c4、c14的板状的部分(板部)232。板部232在该边c4、c14的附近具有一个螺丝孔252。
81.另外,壳体32在面a具有孔部211。在该孔部211收纳配管51。在此,在本实施方式中,孔部211具有圆状的形状,但作为其它构成例,也可以具有任意的形状。
82.另外,壳体32在面a具有灯71。该灯71例如为了通过点亮(或闪烁等)来通报水平多关节型机器人11中的警告等而使用。作为该警告等,作为一例,也可以是通知一个或两个以上的任意的电动机(例如,图5所示的电动机471-1~471-3)被驱动(也就是说,水平多关节型机器人11进行动作)的警告。
83.另外,壳体32在斜面e3具有开口部91,在两个五角形状的面e1、e2之中的一方的面e1具有开口部92。在本实施方式中,这些开口部91、92用于散热而设置。
84.在此,作为开口部91以及开口部92的各自的形状,在本实施方式中是正方形(或也可以是长方形。),但作为其它构成例,也可以是任意的形状。
85.另外,关于开口部91以及开口部92之中的一方或两方,也可以设置覆盖开口的部
分(孔部)的网。在该情况下,由该网能够防止人的手指或物体从壳体32的外侧通过开口部91或者开口部92进入壳体32的内侧。由此,例如,在壳体32的内部存在电流的流动或电压的施加等的情况下,能够防止人的手指或物体对其的接触等。
86.并且,在本实施方式中,关于壳体32,仅在两个板部231之中的一方标注有附图标记,仅在两个螺丝孔251(两个板部231共计四个螺丝孔251)之中的一个标注有附图标记,仅在两个板部232之中的一方标注有附图标记,仅在两个板部232的螺丝孔252(两个板部232共计两个螺丝孔252)之中的一方标注有附图标记。
87.另外,在本实施方式中,关于壳体32,仅在斜面e3中的十二个开口部91之中的一个标注有附图标记,仅在五角形状的面e1中的四个开口部92之中的一个标注有附图标记。在本实施方式中,在斜面e3使十二个开口部91呈四行三列(行与列的朝向也可以是任意的。)等间隔地配置,但也可以使用其它配置。同样地,在本实施方式中,在五角形状的面e1使四个开口部92呈两行两列(行与列的朝向也可以是任意的。)等间隔地配置,但也可以使用其它配置。
88.另外,在本实施方式中,采用了如下构成:在壳体32具有的多个面之中的两个面e3、e1的一方设置开口部91的同时在另一方设置开口部92,从而在开口部91与开口部92之间易于空气流动,但也可以使用其它构成。例如,也可以使开口部91以及开口部92分别设置于壳体32的任意的面。另外,作为开口部91以及开口部92,例如也可以仅设置任意的一方。
89.在此,在图示的例子中,壳体32除去斜边c31、c32而由与x轴、y轴、z轴的各自平行的边构成。另外,在图示的例子中,两个五角形状的面e1、e2分别是与yz平面平行的面,在位于x轴的负的方向的五角形状的面e1设置有开口部92,在相反侧的五角形状的面e2(x轴的正的方向的五角形状的面)未设置开口部。另外,在图示的例子中,面a是与xy平面平行的面,面b是与xz平面平行的面,斜面e3是相对于yz平面垂直的面。另外,在图示的例子中,两个板部231是与xz平面平行的面,两个板部232是与xy平面平行的面。另外,在图示的例子中,使两个板部231以及设置于各自的板部231的两个螺丝孔251相对于位于该板部231所存在的面(与xz平面平行的面)的边、与斜面e3公共的一边c34的中点(通过该中点的与z轴平行的线)而在x轴的正的方向与负的方向配置于对称的位置。另外,在图示的例子中,使两个板部232以及设置于各自的板部232的一个螺丝孔252相对于位于该板部232所存在的面(与xy平面平行的面)的边、与面b公共的一边c51的中点(通过该中点的与y轴平行的线)而在x轴的正的方向与负的方向配置于对称的位置。
90.如这样,在本实施方式中,在壳体32的面e3、e1设置有开口部91、92。由此,能够进行散热。
91.另外,在图3的例子中,在壳体32中的两个(或也可以是三个以上。)不同的面e3、e1的各自设置有开口部91、92。由此,通过开口部91和开口部92进行空气的循环,关于壳体32的内部,由空气的对流而能够提高散热的效率。
92.并且,在本实施方式中,使开口部91、92使用于散热,从而例如与将散热翅片设置于控制装置(例如,图5所示的控制装置421)等的情况相比,能够谋求该控制装置等的小型化、简单化或者低成本化等。
93.盖板的概要
94.盖板41作为外形具有长方形(或也可以是正方形。)的板状的形状的面f1。
95.另外,盖板41沿该长方形的长边c101、c111的各自具有六个螺丝孔(两个螺丝孔311以及四个螺丝孔312)。
96.并且,在本实施方式中,关于盖板41,仅在沿两个边c101、c111的各自的两个螺丝孔311(两个边c101、c111共计四个螺丝孔311)之中的一个标注有附图标记,仅在沿两个边c101、c111的各自的四个螺丝孔312(两个边c101、c111共计八个螺丝孔312)之中的一个标注有附图标记。
97.在此,在图示的例子中,盖板41具有与xz平面平行的面f1。在该面f1中,与z轴的方向平行的边c101、c111为长边,与x轴的方向平行的边c102、c112为短边。
98.另外,在图示的例子中,在该面f1中,沿长边c101、c111的各自排列有两个螺丝孔311以及四个螺丝孔312,两个螺丝孔311在从z轴的正的方向观察负的方向的情况下是第一个~第二个螺丝孔,四个螺丝孔312在从z轴的正的方向观察负的方向的情况下是第三个~第六个螺丝孔。
99.基台、壳体和盖板的关系
100.在此,基台31和壳体32在与xz平面平行的面中的x轴的方向的长度是相同的。另外,基台31和壳体32在基台31的具有板部112的面中的与y轴平行的边的长度和壳体32的具有板部232的面中的与y轴平行的边的长度是相同的。也就是说,在基台31中在忽略了所突起的部分的情况下的与xy平面平行的面和在壳体32中在忽略了斜面的情况下的与xy平面平行的面具有相同形状。
101.然后,在以使这些面重叠的方式配置了基台31和壳体32的情况下,成为基台31的两个螺丝孔131与壳体32的两个螺丝孔252在相同位置重叠的构成,另外,成为使基台31的两个板部111的各自的四个螺丝孔132与壳体32的两个板部231的各自的两个螺丝孔251在各自的边(边c1、c3,或者边c11、c13)呈直线状配置的构成。
102.另外,盖板41的长方形的长边c101、c111具有在螺丝孔132、251排列的方向覆盖基台31的板部111以及壳体32的板部231的程度的长度,该长方形的短边c102、c112具有覆盖相对于这些板部111、231的螺丝孔132、251排列的方向垂直的边c21、c34的程度的长度。也就是说,盖板41具有覆盖基台31的板部111以及壳体32的板部231所在的开口部的程度的形状的面f1。
103.然后,在由盖板41覆盖住该开口部的状态下,成为盖板41的四个螺丝孔311与壳体32的四个螺丝孔251在相同位置重叠的构成,成为盖板41的八个螺丝孔312与基台31的八个螺丝孔132在相同位置重叠的构成。
104.如图1所示,组装基台31、壳体32和盖板41。基台31和壳体32在使基台31的两个螺丝孔131与壳体32的两个螺丝孔252重叠的状态下通过各自的螺丝孔由螺丝紧固而固定。
105.并且,基台31和壳体32例如可以使用更多的螺丝孔(以及螺丝)来固定,或也可以使用螺丝孔(以及螺丝)以外的方法来紧固。
106.另外,如图1所示,盖板41在使壳体32的四个螺丝孔251与盖板41的四个螺丝孔311重叠的同时使基台31的八个螺丝孔132与盖板41的八个螺丝孔312重叠的状态下通过各自的螺丝孔由螺丝紧固,从而相对于基台31以及壳体32被固定。由此,使基台31、壳体32和盖板41一体化地固定。在图1中示出了该螺丝46,仅在共计十二个螺丝46之中的一个标注有附图标记。
107.并且,盖板41例如可以使用更多的螺丝孔(以及螺丝)相对于基台31以及壳体32固定,或也可以使用螺丝孔(以及螺丝)以外的方法相对于基台31以及壳体32而紧固。
108.在此,在本实施方式中,示出基台31和壳体32经由盖板41由螺丝46固定的构成,但作为安装基台31和壳体32的构成,也可以是任意的构成。
109.另外,在本实施方式中,示出基台31和壳体32通过拆装盖板41而能够拆装的构成,但作为其它构成例,也可以使用在不使基台31和壳体32拆下的状态而一体化的构成。
110.在本实施方式中,基台31和壳体32以分开的方式构成。并且,在使基台31和壳体32由相同材料构成的那样的情况下,也可以使它们看起来如被一体化了的形状的构成部(使基台31与壳体32合在一起的形状的构成部)。
111.在此,当基台31和壳体32被分体构成时,例如,能够提升各自的维护性,另外,能够使基台31与壳体32的组合的变化自由。例如,在基台31和壳体32的一方发生了故障等的情况下,无需更换它们两方,而只要更换发生了故障等的部件即可。
112.第一臂的概要
113.第一臂33具有大致长方体(或可以是大致立方体,或也可以是长方体、立方体等。)的形状,并以能够绕与在该大致长方体中彼此相对的两个大致长方形的面垂直的方向的旋转轴(在图示的例子中是与z轴的方向平行的中心轴)旋转(旋转)的方式安装于基台31。在本实施方式中,以在基台31的具有突起部的面(该突起部以外的部位的面d5)和与该面d5相对的壳体32的面之间夹持包含第一臂33的该大致长方形的面中的一方的短边(在图示的例子中是位于y轴的负的方向的短边)的一部分(第一臂33的一部分)的方式而配置。在该被夹持的部分设置有该旋转轴。也就是说,从该旋转轴的轴向观察,基台31和壳体32具有彼此重叠的部分。并且,第一臂33与壳体32的该面分离。
114.在此,在本实施方式中,作为第一臂33的大致长方体的形状,使用大致长方形的面具有厚度的形状,另外,作为该大致长方形的形状,使用在长方形的两个短边带有圆度(曲率)的形状。
115.第二臂的概要
116.第二臂34具有多面体的形状,在本实施方式中,具有与壳体32相似的形状,并以使第二臂34的不与斜面g1相接的两个长方形(或也可以是正方形。)的面之中的一方(在图示的例子中是位于y轴的负的方向的面g2)和壳体32的不与斜面e3相接的两个长方形(或也可以是正方形。)的面之中的一方(在图示的例子中是面b)相对的方式而配置。
117.另外,第二臂34能够绕不与斜面g1相接的两个长方形的面之中的另一方(在图示的例子中是位于z轴的负的方向的面g3)垂直的方向的旋转轴(在图示的例子中是与z轴的方向平行的中心轴)旋转(旋转)地安装于第一臂33。在本实施方式中,以使第一臂33的大致长方形的面中的另一方的短边(在图示的例子中是位于y轴的正的方向的短边)的近旁的一部分(第一臂33的一部分)和第二臂34的不与斜面g1相接的两个长方形的面之中的另一方(面g3)的一部分重叠的方式而配置。在该重叠的部分设置有该旋转轴。在本实施方式中,相对于第一臂33的大致长方形的面,壳体32以及第二臂34配置于相同一侧(在图示的例子中是z轴的正的方向的一侧)。
118.另外,第二臂34在相对于与第一臂33相对的面(在图示的例子中是位于z轴的负的方向的面)而相对的面(在图示的例子中是位于z轴的正的方向的面、斜面g1以外的部分的
面g4)具有孔部。在图示的例子中,该面g4是与xy平面平行的面。在该孔部收纳配管51。该孔部例如在配管51的直径一定的情况下也可以与壳体32的孔部211具有相同直径。
119.动作部的概要
120.动作部35概略地具有棒状的形状(例如,与注射器或钢笔相似的形状)。动作部35设置于在第二臂34中相对于与壳体32相对的面(在图示的例子中是位于y轴的负的方向的面g2)而相对的面(在图示的例子中是位于y轴的正的方向的面、斜面g1或者该斜面g1以外的部分的面g4之中的一方或两方)。动作部35以该棒状的方向与第一臂33的旋转的旋转轴以及第二臂34的旋转的旋转轴成为相同方向(在图示的例子中是与z轴平行的方向)的方式而配置。另外,动作部35成为能够沿该方向移动(直线运动)的构成。
121.另外,动作部35在该棒状的两端部之中在第一臂33以及基台31的一侧(在图示的例子中是z轴的负的方向的一侧)的端部具有处理对象物12的处理机构部(未图示)。该处理机构部在本实施方式中是吸附对象物12的吸附机构部,但也可以是其它机构部。并且,也可以使该处理机构部设置于该棒状的两端部之中相反的一侧(在图示的例子中是z轴的正的方向的一侧)的端部。
122.另外,动作部35例如也可以具有能够绕沿该棒状的旋转轴(在图示的例子中是与z轴的方向平行的中心轴)旋转(旋转)的机构部。
123.配管的概要
124.配管51具有管状的形状,是空心的具有细长的形状的管。另外,配管51在两端分别具有用于与连接对象连接的部分(连接部)。配管51能够在内部(该空心的部分)收纳信号线等的布线。在本实施方式中,在配管51收纳通过壳体32与第二臂34之间的信号线等的布线。
125.在此,在本实施方式中,配管51作为保护信号线等的布线的部件(保护部件)的一例而使用。
126.作为该保护部件,也可以使用配管51以外的部件。
127.水平多关节型机器人的控制系统的概要
128.图5是示出本发明的一实施方式的水平多关节型机器人11的控制系统的概略的构成例的图。在图5中示出了水平多关节型机器人11的内部的构成例和外部的电源411。
129.水平多关节型机器人11具备控制装置421和三个电动机471-1~471-3。并且,在图5中示出了第一臂33、第二臂34和动作部35。另外,在图5的例子中,关于动作部35能够旋转的情况的构成,省略了图示。
130.控制装置421具备:构成电源基板430的驱动电源基板431以及电源转换基板432、控制基板433、基板间的连接部434、三个电动机控制基板451-1~451-3、三个编码器452-1~452-3、三个放大器部453-1~453-3。连接部434连接驱动电源基板431和控制基板433。
131.在此,电动机控制基板451-1、编码器452-1、放大器部453-1和电动机471-1使第一臂33动作。另外,电动机控制基板451-2、编码器452-2、放大器部453-2和电动机471-2使第二臂34动作。另外,电动机控制基板451-3、编码器452-3、放大器部453-3和电动机471-3使动作部35动作。
132.在图5的例子中,示出由电动机471-3驱动动作部35的直线运动的动作的情况,但例如进一步地在驱动动作部35的旋转的动作的情况下,水平多关节型机器人11具备用于该驱动的功能部(在本实施方式中是电动机控制基板、编码器、放大器部、电动机)。
133.电源411供给交流的电力。作为电源411,也可以使用任意的电源。
134.驱动电源基板431接受从电源411供给的电力,并将该电力的信号(例如,电流信号或电压信号)向电源转换基板432输出。
135.电源转换基板432输入从驱动电源基板431所输出的信号,将该信号从交流(ac)的信号转换到直流(dc)的信号并向驱动电源基板431输出。电源转换基板432具有将交流的信号转换为直流的信号的转换器的功能。另外,电源转换基板432也可以转换信号的电压的电平等。
136.驱动电源基板431将从电源转换基板432所输出的信号向控制基板433以及三个放大器部453-1~453-3的各自输出,从而向该各自供给电力。
137.在此,向控制基板433以及三个放大器部453-1~453-3的各自供给的信号的特性(电压的电平等)也可以不同,在该情况下,电源转换基板432将从驱动电源基板431所输入的信号转换为与控制基板433以及三个放大器部453-1~453-3的各自适应的信号,并将它们向驱动电源基板431输出。然后,驱动电源基板431将它们输出。
138.控制基板433例如具有cpu(central processing unit:中央处理器),由从驱动电源基板431供给的电力而进行各种动作,将用于控制三个电动机471-1~471-3的各自的信号(控制信号)向各自的电动机控制基板451-1~451-3输出。
139.并且,在图5的例子中,这些控制信号被从控制基板433统一输出,经由按电动机控制基板451-1、电动机控制基板451-2、电动机控制基板451-3的顺序串联布设的公共的信号线而向各自的电动机控制基板451-1~451-3送出。作为其它构成例,也可以使这些控制信号经由在每个电动机控制基板451-1~451-3都不同的信号线(并联的信号线)来送出。
140.各自的放大器部453-1~453-3具有用于驱动各自的电动机471-1~471-3的驱动电路,由从驱动电源基板431供给的电力而进行各种动作,例如,向各自的电动机控制基板451-1~451-3供给电力。
141.各自的电动机控制基板451-1~451-3例如具有cpu,由从各自的放大器部453-1~453-3供给的电力而进行各种动作,向各自的编码器452-1~452-3以及各自的电动机471-1~471-3供给电力。另外,各自的电动机控制基板451-1~451-3基于从控制基板433所送出的控制信号将用于驱动(控制)各自的电动机471-1~471-3的信号(电动机驱动信号)向各自的电动机471-1~471-3输出。
142.各自的编码器452-1~452-3由从各自的电动机控制基板451-1~451-3供给的电力而进行动作,检测各自的电动机471-1~471-3的旋转状况(例如,转速等),将该检测的结果的信息向各自的电动机控制基板451-1~451-3输出。
143.各自的电动机471-1~471-3由从各自的电动机控制基板451-1~451-3供给的电力而进行动作,输入从各自的电动机控制基板451-1~451-3所输出的信号,并基于该信号而被驱动,从而使各自的对象(第一臂33、第二臂34、动作部35)动作。并且,向各自的电动机471-1~471-3供给的电力的信号和控制的信号也可以是公共的信号(也就是说,进行电力供给和控制的两方的信号)。
144.如这样,控制装置421控制第一臂33、第二臂34以及动作部35的动作。另外,控制装置421控制水平多关节型机器人11中的其它各种各样的处理。
145.另外,控制装置421中的驱动电源基板431以及电源转换基板432向驱动第一臂33
的驱动部(在图5的例子中是电动机控制基板451-1、放大器部453-1、电动机471-1)、驱动第二臂34的驱动部(在图5的例子中是电动机控制基板451-2、放大器部453-2、电动机471-2)、驱动动作部35的驱动部(在图5的例子中是电动机控制基板451-3、放大器部453-3、电动机471-3)供给电源。并且,也可以使驱动部(或其一部分的功能)例如被称为致动器。
146.在此,在图5的例子中,关于各自的电动机471-1~471-3,示出了设置有电动机控制基板451-1~451-3、编码器452-1~452-3和放大器部453-1~453-3的构成,但作为其它构成例,也可以使它们之中的任意两个或三个(也就是说是所有)一体化。作为一例,关于各自的电动机471-1~471-3,也可以使电动机控制基板451-1~451-3和放大器部453-1~453-3一体化。另外,例如,也可以使用不设置编码器452-1~452-3的构成。
147.另外,在图5的例子中,示出了电动机471-1~471-3不包含于控制装置421的情况,但作为其它构成例,也可以使电动机471-1~471-3包含于控制装置421。另外,在图5的例子中,示出了使编码器452-1~452-3包含于控制装置421的情况,但作为其它构成例,也可以不使编码器452-1~452-3包含于控制装置421。另外,控制装置421也可以是其它构成。
148.另外,作为各自的电动机471-1~471-3,例如,可以使用使与电动机相关的放大器部以外的部分(各自的电动机471-1~471-3以及电动机控制基板451-1~451-3的部分)和放大器部的部分(各自的放大器部453-1~453-3的部分)一体化的构成,或也可以使用这些部分是分体的构成。在使这些部分一体化的情况下,例如,也可以使编码器的部分(各自的编码器452-1~452-3的部分)进一步地一体化。在此,在使与电动机相关的放大器部以外的部分和放大器部的部分一体化的构成中,有时能够缩短连接它们的布线,并谋求小型化。
149.另外,在图5的例子中,示出了三个电动机控制基板451-1~451-3是分体的情况,但作为其它构成例,也可以使用它们之中的两个以上是一体的构成(它们之中的两个以上是由公共的基板所构成的构成)。
150.另外,作为各自的电动机471-1~471-3,例如,可以使用交流(ac)的电动机,或也可以使用直流(dc)的电动机。
151.水平多关节型机器人中的基板的配置的概要
152.图6是示出本发明的一实施方式的水平多关节型机器人11中的基板的配置的概略的构成例的图。
153.在图6中为了说明的方便起见示出了与图1所示相同的作为三维正交坐标系的xyz坐标系。在图6中以结合图1所示的水平多关节型机器人11的配置的朝向示出了水平多关节型机器人11。
154.图6是从壳体32的设置有开口部92的面e1(在图示的例子中是与yz平面平行的面)的外侧在相对于该面e1垂直的方向(在图示的例子中是从x轴的负朝向正的方向)观察图1所示的水平多关节型机器人11的情况下、关于基台31以及壳体32将内部透视的情况下的概略图。
155.在图6的例子中,在基台31的内部配置并设置有控制基板433和第一臂33的电动机471-1。另外,在壳体32的内部配置并设置有电源转换基板432。
156.在此,在本实施方式中,使包含于控制装置421的各功能部以及三个电动机471-1~471-3设置于水平多关节型机器人11。关于它们,在图6的例子中,关于控制基板433、电动机471-1以及电源转换基板432以外的部分,省略了图示,但在使控制装置421的至少一部分
位于基台31的内部的构成中,也可以分别设置于能够配置的任意的部位。
157.例如,驱动电源基板431可以配置并设置于基台31的内部,或也可以配置并设置于壳体32的内部。
158.例如,与第一臂33相关的电动机控制基板451-1、编码器452-1以及放大器部453-1和电动机471-1同样地,在基台31中,也可以配置并设置于第一臂33的近旁。
159.例如,也可以使与第二臂34相关的电动机控制基板451-2、编码器452-2、放大器部453-2以及电动机471-2配置并设置于第二臂34的内部。
160.例如,也可以使与动作部35相关的电动机控制基板451-3、编码器452-3、放大器部453-3以及电动机471-3在第二臂34中配置并设置于动作部35的近旁。
161.如这样,在本实施方式的水平多关节型机器人11中,控制设置于基台31的第一臂33的控制装置421的至少一部分位于该基台31的内部。由此,在水平多关节型机器人11中,能够缩小占用空间。具体地,在以往和本实施方式中,在制造具有相同程度的尺寸的水平多关节型机器人的情况下,相对于在以往使水平多关节型机器人(主体)与控制装置以分体构成,在本实施方式中由于控制装置421的至少一部分位于水平多关节型机器人11的基台31的内部,因此与以往的水平多关节型机器人相比,能够缩小占用空间。
162.另外,在本实施方式中,在水平多关节型机器人11中,内置有控制装置421并被一体化。在图5的例子中,控制装置421的构成部设置于基台31、壳体32、第一臂33或者第二臂34的内部。在本实施方式中,通过设置壳体32,从而在该壳体32的内部产生能够收纳控制装置421的构成部等的空间(space),并利用该空间。
163.由此,在本实施方式中,能够谋求水平多关节型机器人11的小型化,能够提高安全性(例如,抑制带给外界的影响)。
164.在本实施方式中,在水平多关节型机器人11中,例如,在将在基台31中相对于与壳体32相对的面d5相反的面设置在设置对象(例如,地面或者天花板等)的情况下,能够缩小占用空间,能够提高机械手(在本实施方式中是第一臂33、第二臂34和动作部35的部分)以及周边装置的布局的自由度。
165.在本实施方式中,例如,也可以不设计控制装置421的设置场所。
166.在本实施方式中,例如,成为考虑到抑制基台31的占用空间的增大的构成,与单纯地使基台的占用空间增大来收纳控制装置的部分的构成相比,在占用空间的点上能够有效地使用设置对象(例如,地面或者天花板等)的区域。
167.在本实施方式中,例如,由于控制装置421的构成部收纳于水平多关节型机器人11的内部(基台31的内部、壳体32的内部、第一臂33的内部或者第二臂34的内部),因此用于由控制装置421而使第一臂33、第二臂34以及动作部35动作的布线(电源的线以及控制的线)的路径设计变得容易。
168.另外,在本实施方式中,在水平多关节型机器人11中,使在构成控制装置421的部件之中发热量大的部件(在图6的例子中是电源转换基板432)和在控制装置421以外发热量大的部件(在图6的例子中是第一臂33的电动机471-1)配置于不同的构成部(在本实施方式中是壳体32和基台31的各自)。由此,在基台31以及壳体32中,能够抑制温度的上升。如这样,将在构成控制装置421的部件之中作为不耐热的部件(例如,最不耐热的部件)的电源转换基板432隔离并集中进行热对策,从而例如能够缩小(优选,最小限度地)由必须进行热的
限制而造成的功能的下降。
169.在此,在本实施方式中,示出了使驱动电源基板431和电源转换基板432以分体设置的情况,但作为其它构成例,也可以设置使驱动电源基板431和电源转换基板432一体化的基板(电源基板430)。在该情况下,例如,也可以将被一体化的该基板作为发热量大的部件(不耐热的部件)来处置。
170.并且,作为其它构成例,在使控制装置421的至少一部分位于基台31的内部的构成中,可以使与第二臂34相关的电动机控制基板451-2分离第二臂34而配置,例如,也可以配置并设置于基台31的内部或壳体32的内部。
171.同样地,作为其它构成例,在使控制装置421的至少一部分位于基台31的内部的构成中,可以使与动作部35相关的电动机控制基板451-3分离动作部35而配置,例如,也可以配置并设置于基台31的内部或壳体32的内部。
172.另外,作为其它构成例,关于图6所示的电源转换基板432以及控制基板433,在使控制装置421的至少一部分位于基台31的内部的构成中,也能够使用其它配置,例如,可以使电源转换基板432配置并设置于基台31的内部,另外,可以使控制基板433配置并设置于壳体32的内部,另外,也可以使电源转换基板432和控制基板433设置于基台31或壳体32之中的相同一方。
173.另外,在本实施方式中,考虑为优选使电源转换基板432和电动机471-1收纳于不是相同构成部(例如,基台31或者壳体32之中的任一方)而是不同的构成部的构成,但也可以使用收纳于相同构成部的构成。
174.例如,在本实施方式中,示出了考虑到包含于控制装置421的各基板(驱动电源基板431、电源转换基板432、控制基板433、电动机控制基板451-1~451-3)的尺寸的构成例,但作为其它构成例,在小型的机器人等中,也可以使用使包含于控制装置421的基板的所有一体化并设置于32的内部的构成。
175.水平多关节型机器人11中的配管的配置的概要
176.图7是示出本发明的一实施方式的水平多关节型机器人11中的配管51的配置的概略的构成例的图。
177.在图7中为了说明的方便起见示出了与图1所示相同的作为三维正交坐标系的xyz坐标系。在图7中以结合图1所示的水平多关节型机器人11的配置的朝向示出了水平多关节型机器人11。
178.图7是从壳体32的设置有开口部92的面(在图示的例子中是与yz平面平行的面e1)的外侧在相对于该面垂直的方向(在图示的例子中是从x轴的负朝向正的方向)观察图1所示的水平多关节型机器人11的情况下的概略的外观图。
179.在本实施方式中,在基台31中相对于设置壳体32的一侧的面d5相对的面(在图示的例子中是位于z轴的负的方向的面)、在壳体32中连接配管51的面a和在第二臂34中连接配管51的面(在图示的例子中是位于z轴的正的方向的面g4)成为平行(在图示的例子中与xy平面平行)。另外,相对在基台31中相对于设置壳体32的一侧的面d5相对的面的垂直距离(在图示的例子中是z轴的方向的距离),在壳体32中连接配管51的面a和在第二臂34中连接配管51的面g4成为相同。
180.在图示的例子中,将对配管51的一端的连接部和壳体32进行连接的部位(连接位
置a1)与对配管51的另一端的连接部和第二臂34进行连接的部位(连接位置a2)连结的线(在以下,称为“基准线”。)h1相对于在基台31中相对于设置壳体32的一侧的面d5相对的面成为平行(在图示的例子中与xy平面平行)。也就是说,在第一臂33的旋转轴的轴向上,连接位置a1和连接位置a2在相同的位置。
181.并且,在图示的例子中,在除去配管51的两端的连接部的部分描绘有基准线h1,但在本实施方式中,配管51的两端的连接部是相同构成,即使在不除去该连接部(也就是说,包含有该连接部)的情况下,基准线h1也成为该平行。
182.如这样,在本实施方式中,在壳体32的面a中使配管51的一端安装于第一臂33的旋转轴的位置的同时,在位于与该面a同一平面(包含面a的更宽的平面)之上的第二臂34的面g4中使该配管51的另一端安装于第二臂34的旋转轴的位置。这些面a、g4是相对于第一臂33的旋转轴以及第二臂34的旋转轴垂直的面。
183.由此,配管51的一端与另一端成为安装于同一平面的状态,例如,与使配管51的一端与另一端安装于不包含于同一平面的两个面(在图示的例子中是在旋转轴的方向错位的面)的各自的情况相比,能够降低施加于配管51的应力,抑制配管51的晃动。因此,使收纳于配管51的内部的布线的断线的风险降低。另外,在使布线收纳于配管51的情况下,例如,与不使用配管而将布线在外部牵拉的情况相比,使布线的断线的风险降低。
184.水平多关节型机器人的变形例(第一变形例)
185.图8是示出本发明的一实施方式的水平多关节型机器人511的变形例(第一变形例)的概略的构成例的图。
186.在图8中为了说明的方便起见示出了与图1所示同样的作为三维正交坐标系的xyz坐标系。在图8中以结合图1所示的水平多关节型机器人11的配置的朝向示出了变形例的水平多关节型机器人511。
187.在图8中示出了水平多关节型机器人511的概略,具体地,示出了基台531、壳体532、臂(以下,也称为“第一臂”。)533、臂(以下,也称为“第二臂”。)534、动作部535、盖板541、配管551和灯571。
188.另外,在图8中作为水平多关节型机器人511的内部的构成例示出了控制基板591、第一臂533的放大器部592以及电动机593。
189.在此,图8所示的变形例的水平多关节型机器人511与图1所示的水平多关节型机器人11相比,概略地,内部的构成以及与第一臂533相关的构成不同,关于其它部分的构成是相同的。
190.在此,主要说明关于图8所示的变形例的水平多关节型机器人511与图1所示的水平多关节型机器人11相比不同的构成部分。
191.图8是从壳体532的设置有开口部(相当于图1所示的开口部92的开口部)的面(在图示的例子中是与yz平面平行的面)的外侧在相对于该面垂直的方向(在图示的例子中是从x轴的负朝向正的方向)观察水平多关节型机器人511的情况下、关于基台531以及壳体532将内部透视的情况下的概略图。
192.在图8例子中,第一臂533具有大致长方体(或可以是大致立方体等,或也可以是长方体、正方体等。)的形状,并以能够绕与在该大致长方体中彼此相对的两个大致长方形的面垂直的方向的旋转轴(在图示的例子中是与z轴的方向平行的中心轴)旋转(旋转)的方式
安装于壳体532。在图8的例子中,以在基台531的具有突起部的面d11(该突起部以外的部位)和与该面d11相对的壳体532的面i1之间夹持包含第一臂533的该大致长方形的面中的一方的短边(在图示的例子中是位于y轴的负的方向的短边)的一部分(第一臂533的一部分)的方式而配置。在该被夹持的部分设置有该旋转轴。也就是说,从该旋转轴的轴向观察,基台531和壳体532具有彼此重叠的部分。并且,第一臂533分离基台531的该面d11。
193.在此,在图8的例子中,作为第一臂533的大致长方体的形状,使用大致长方形的面具有厚度的形状,另外,作为该大致长方形的形状,使用在长方形的两个短边带有圆度(曲率)的形状。
194.如这样,在图1的例子中,相对于使第一臂33安装于基台31,在图8的例子中,使第一臂533安装于壳体532。在图8的例子中,基台531是经由壳体532间接地支承第一臂533的构成部。
195.另外,在图8例子中,在基台531的内部配置并设置有控制基板591。另外,在壳体532的内部配置并设置有第一臂533的放大器部592以及电动机593。
196.在此,在本实施方式中,使包含于控制装置(相当于图5所示的控制装置421的控制装置)的各功能部以及三个电动机(相当于图5所示的三个电动机471-1~471-3的电动机)设置于水平多关节型机器人511。关于它们,在图8的例子中,关于控制基板591(相当于图5所示的控制基板433的控制基板)、第一臂533的放大器部592(相当于图5所示的放大器部453-1的放大器部)以及电动机593(相当于图5所示的电动机471-1的电动机)以外的部分,省略了图示,但在使控制装置的至少一部分位于基台531的内部的构成中,也可以分别设置于能够配置的任意的部位。例如,在图8例子中,也可以使电源转换基板(相当于图5所示的电源转换基板432的电源转换基板)设置于基台531的内部。
197.另外,作为其它构成例,关于图8所示的控制基板591、第一臂533的放大器部592以及电动机593,在使控制装置的至少一部分位于基台531的内部的构成中,也可以分别使用其它配置。
198.在此,在图8例子中,在基台531的内部收纳有控制基板591,在壳体532的内部收纳有第一臂533的放大器部592以及电动机593。另外,由壳体532支承第一臂533,配管551连接于壳体532(在图8例子中是第一臂533的放大器部592以及电动机593的近旁的位置)。
199.在这样的构成中,能够使成为与控制或者电源相关的源头的构成部(控制基板591、驱动电源基板和电源转换基板)、与第一臂533的驱动相关的构成部(放大器部592以及电动机593、电动机控制基板、编码器)、配管551、与第二臂534的驱动相关的构成部(放大器部以及电动机、电动机控制基板、编码器)、与动作部535的驱动相关的构成部(放大器部以及电动机、电动机控制基板、编码器)呈一个朝向(在此,意思是不会在中途来回往返的朝向)地配置。通过这样的配置,例如,关于这些构成部,整体的布线的布设成为该一个朝向,能够使整体的布线的布设顺畅。在该构成中,例如,按成为与控制或者电源相关的源头的构成部、与第一臂533的驱动相关的构成部、与第二臂534的驱动相关的构成部、与动作部535的驱动部相关的构成部的顺序,以使布线布设下去的方式构成。该一个朝向的布线的布设例如也可以是连串的布设。
200.另外,使向与第二臂534的驱动相关的构成部以及与动作部535的驱动相关的构成部的布线通过配管551的内部而布设。并且,使与第二臂534的驱动相关的构成部例如配置
于第二臂534的内部,并配置于第二臂534的旋转轴的近旁。另外,也可以使与动作部535的驱动相关的构成部例如配置于动作部535的近旁,并配置于第二臂534的内部。
201.水平多关节型机器人的变形例(第二变形例)
202.图9是示出本发明的一实施方式的水平多关节型机器人611的变形例(第二变形例)的概略的构成例的图。
203.在图9中为了说明的方便起见示出了与图1所示同样的作为三维正交坐标系的xyz坐标系。在图9中以结合图1所示的水平多关节型机器人11的配置的朝向示出了变形例的水平多关节型机器人611。
204.在图9中示出了水平多关节型机器人611的概略,具体地,示出了基台631、壳体632、臂(以下,也称为“第一臂”。)633、臂(以下,也称为“第二臂”。)634、动作部635、盖板641和灯671。
205.另外,在图9中作为水平多关节型机器人611的内部的构成例示出了控制基板691、第一臂633的放大器部692以及电动机693。
206.在此,图9所示的变形例的水平多关节型机器人611与图1所示的水平多关节型机器人11相比,概略地,内部的构成、基台631以及壳体632的形状、与第一臂633以及第二臂634相关的构成不同,另外,不具备图1所示的配管51,关于其它部分的构成是相同的。
207.在此,主要说明关于图9所示的变形例的水平多关节型机器人611与图1所示的水平多关节型机器人11相比不同的构成部分。
208.图9是从壳体632的设置有开口部(相当于图1所示的开口部92的开口部)的面(在图示的例子中是与yz平面平行的面)的外侧在相对于该面垂直的方向(在图示的例子中是从x轴的负朝向正的方向)观察水平多关节型机器人611的情况下、关于基台631以及壳体632将内部透视的情况下的概略图。
209.在图9例子中,第一臂633具有大致长方体(或可以是大致立方体等,或也可以是长方体、正方体等。)的形状,并以能够绕与在该大致长方体中彼此相对的两个长方形的面垂直的方向的旋转轴(在图示的例子中是与z轴的方向平行的中心轴)旋转(旋转)的方式安装于壳体632。在图9的例子中,以在基台631的具有突起部的面d21(该突起部以外的部位)和与该面d21相对的壳体632的面i11之间夹持包含第一臂633的该大致长方形的面中的一方的短边(在图示的例子中是位于y轴的负的方向的短边)的一部分(第一臂633的一部分)的方式而配置。在该被夹持的部分设置有该旋转轴。也就是说,从该旋转轴的轴向观察,基台631和壳体632具有彼此重叠的部分。并且,第一臂633分离基台631的该面d21。
210.在此,在图9的例子中,作为第一臂633的大致长方体的形状,使用大致长方形的面具有厚度的形状,另外,作为该大致长方形的形状,使用在长方形的两个短边带有圆度(曲率)的形状。
211.另外,在图9的例子中,第二臂634相对于第一臂633能够旋转(旋转)地安装于基台631所在的方向(在图示的例子中是z轴的负的方向)的一侧。另外,在图9的例子中,使在第二臂634中与斜面g11相接的两个长方形(或也可以是正方形。)的面之中相对于与动作部635的直线运动方向(在图示的例子中是z轴的方向)垂直的面(在图示的例子中是位于z轴的正的方向的面g12)安装于第一臂633。
212.如这样,在图1的例子中,相对于使第一臂33安装于基台31,在图9的例子中,使第
一臂633安装于壳体632。在图9的例子中,基台631是经由壳体632间接地支承第一臂633的构成部。
213.另外,相对于图1的例子,在图9的例子中,安装第二臂634的第一臂633的面为相反侧的面。另外,相对于图1的例子,在图9的例子中,安装于第一臂633的第二臂634的面g12为相反侧的面。
214.另外,在图9的例子中,在基台631的内部配置并设置有控制基板691。另外,在壳体632的内部配置并设置有第一臂633的放大器部692以及电动机693(在图示的例子中,电动机693的一部分位于该内部。)。
215.在此,在本实施方式中,使包含于控制装置(相当于图5所示的控制装置421的控制装置)的各功能部以及三个电动机(相当于图5所示的三个电动机471-1~471-3的电动机)设置于水平多关节型机器人611。关于它们,在图9的例子中,关于控制基板591(相当于图5所示的控制基板433的控制基板)、第一臂633的放大器部692(相当于图5所示的放大器部453-1的放大器部)以及电动机593(相当于图5所示的电动机471-1的电动机)以外的部分,省略了图示,但在使控制装置的至少一部分位于基台631的内部的构成中,也可以分别设置于能够配置的任意的部位。
216.另外,作为其它构成例,关于图9所示的控制基板691、第一臂633的放大器部692以及电动机693,在使控制装置的至少一部分位于基台631的内部的构成中,也可以分别使用其它配置。
217.在此,在图9例子中,在基台631的内部收纳有控制基板691,在壳体632的内部收纳有第一臂633的放大器部692以及电动机693。另外,由壳体632支承第一臂633。
218.在这样的构成中,与图8的例子同样地,能够使成为与控制或者电源相关的源头的构成部、与第一臂633的驱动相关的构成部、与第二臂634的驱动相关的构成部、与动作部635的驱动相关的构成部呈一个朝向(在此,意思是不会在中途来回往返的朝向)地配置。通过这样的配置,例如,关于这些构成部,整体的布线的布设成为该一个朝向,能够使整体的布线的布设顺畅。该一个朝向的布线的布设例如也可以是连串的布设。
219.另外,在图9例子中,不设置配管51,而可以使向与第二臂634的驱动相关的构成部以及与动作部635的驱动相关的构成部的布线例如通过第一臂633的内部而布设,或也可以通过外部而布设。作为其它构成例,也可以设置配管并使布线收纳于该配管。
220.水平多关节型机器人的壳体中的显示部的配置的概要
221.在本实施方式中,水平多关节型机器人11具备为了显示自己(该水平多关节型机器人11)的状态等而使用的显示部。该显示部例如可以是发出光的发光部,或也可以是其它。该发光部也可以是发光二极管(led:light emitting diode)。该发光部例如可以由一个点的光来表示信息,或也可以由多个点(例如,像素)的光的集合来表示文字、图形的信息。
222.图10是示出本发明的一实施方式的水平多关节型机器人11的壳体32中的显示部711的配置的概略的构成例的图。
223.在图10中为了说明的方便起见示出了与图1所示同样的作为三维正交坐标系的xyz坐标系。在图10中以结合图1所示的水平多关节型机器人11的配置的朝向示出了壳体32。
224.在本实施方式中,在壳体32具有的多个面之中的一个面b具备由作为发光部的led构成的显示部711。在本实施方式中,在位于第二臂34的一侧的面b设置有六个显示部711。
225.在本实施方式中,由图5所示的控制装置421(例如,与电源相关的驱动电源基板431以及电源转换基板432、与控制相关的控制基板433)对显示部711供给电力,并对显示部711发送用于控制显示(在本实施方式中是发光)的信号(显示控制信号)。显示部711接收该显示控制信号,并基于该显示控制信号进行显示的动作(也包含不显示的情况)。在该情况下,例如,可以使控制装置421与显示部711通过有线(布线)能够通信地连接,或也可以通过无线能够通信地连接。
226.关于水平多关节型机器人11的状态等,显示部711也可以显示任意的信息。该信息例如也可以是表示是否在水平多关节型机器人11中的预定的部位发生了故障的信息。作为一例,也可以使用如下构成:在发生了该故障的情况下由显示部711发出预定的光,在未发生该故障的情况下不由该显示部711发生该预定的光。
227.并且,在本实施方式中,仅在六个显示部711之中的一个标注有附图标记。在本实施方式中,在面b使六个显示部711呈两行三列(行与列的朝向也可以是任意的。)等间隔地配置,但也可以使用其它配置。在本实施方式中,具有六个显示部711,例如,可以在每个显示部711(每一个显示部711)表示不同的信息,或也可以由两个以上的显示部711的组合来表示信息。
228.另外,显示部711的数目也可以是一个以上的任意的数目。
229.另外,显示部711也可以设置于壳体32具有的多个面之中的任意的面。
230.另外,显示部711也可以设置于壳体32具有的多个面之中的两个以上的面。
231.另外,在本实施方式中,在壳体32设置有显示部711,但作为其它构成例,可以在水平多关节型机器人11的任意的部位设置显示部711,例如,也可以在基台31等设置显示部711。
232.图11是示出本发明的一实施方式的水平多关节型机器人11的壳体32中的显示部711的配置与第一臂33的可动区域的关系的一例的图。
233.图11的例子与图10的例子对应。
234.在图11中为了说明的方便起见示出了与图1所示同样的作为三维正交坐标系的xyz坐标系。在图11中以结合图1所示的水平多关节型机器人11的配置的朝向示出了壳体32。
235.图11是在相对于第一臂33旋转的面(在图示的例子中是与xy平面平行的面)垂直的方向、在从壳体32朝向基台31的方向(在图示的例子中是从z轴的正朝向负的方向)观察壳体32的情况下的图。
236.在图11中示出了第一臂33的旋转的旋转轴的位置761,另外,与位于能够旋转的范围的中心的第一臂33一起,示出了位于能够旋转的范围的一方的端的第一臂33-2(与第一臂33是相同的臂,在图11中是虚拟地示出了的臂)和位于能够旋转的范围的另一方的端的第一臂33-3(与第一臂33是相同的臂,在图11中是虚拟地示出了的臂)。位于它们的两端的第一臂33-2、33-3(与第一臂33是相同的臂,在图11中是虚拟地示出了的臂)之间的范围为第一臂33的可动区域(旋转范围)。
237.在本实施方式中,在从图11所示的方向(或相反的方向也是同样)观察的情况下,
成为使显示部711(在本实施方式中是六个显示部711)的全部包含于第一臂33的可动区域的构成。作为其它构成例,也可以使用在从图11所示的方向(或相反的方向也是同样)观察的情况下,使显示部711(在本实施方式中是六个显示部711)的一部分包含于第一臂33的可动区域的构成。
238.如这样,在本实施方式中,从第一臂33旋转的旋转轴的轴向观察,显示部711的至少一部分位于第一臂33的可动区域的内部。
239.在这样的构成中,相对于壳体32从第一臂33所在的一方观察壳体32的一方的情况下(在图示的例子中,在从y轴的正的一方观察负的一方的情况下),易于观察显示部711的显示。
240.在此,一般而言,关于水平多关节型机器人11,有时将设置有第一臂33的一方的面(在图示的例子中是y轴的正的一方的面、壳体32的面b的一方的面)称为“正面”,有时将相对于该正面相对的相反侧的面(在图示的例子中是y轴的负的方向的面、设置盖板41的一方的面)称为“背面”。
241.在此,在图10以及图11的例子中,显示部711设置于水平多关节型机器人11的正面的一侧。在该构成中,例如,与使显示部设置于水平多关节型机器人的背面的一侧的构成相比,有时能够使显示部711的显示内容易于观察。例如,在水平多关节型机器人11的背面的一侧存在其它物体的情况下,在使水平多关节型机器人11的背面的一侧配置于墙壁的近旁的情况下,或者在观察水平多关节型机器人11的动作的人(例如,操作员)位于该水平多关节型机器人11的正面的一侧的情况下等,易于观察显示部711的显示内容。
242.在图10以及图11的例子中,使显示部711配置于壳体32的正面的一侧,从而能够使显示部711的显示内容醒目,对人(例如,操作员)来说能够易于掌握与异常的发生等相关的报错的警告等的信息。
243.水平多关节型机器人的壳体中的显示部的配置的变形例
244.图12是示出本发明的一实施方式的水平多关节型机器人11的壳体811中的显示部871的配置的变形例的概略的构成例的图。
245.在图12中为了说明的方便起见示出了与图1所示同样的作为三维正交坐标系的xyz坐标系。在图12中以结合图1所示的水平多关节型机器人11的配置的朝向示出了变形例的壳体811。
246.在此,主要说明关于图12所示的变形例的壳体811与图1所示的水平多关节型机器人11的壳体32相比不同的构成部分。
247.在图12中示出了壳体811的概略,具体地,在与图1(图3也是同样)所示的壳体32同样的构成中,进一步地,在壳体811具有的多个面之中的一个面e11具备具有显示部871(在图12的例子中是六个显示部871)的盖板861(例如,盖子那样的盖板)。该面e11是设置开口部92的面。
248.在图12中示出了该显示部871,仅在共计六个显示部871之中的一个标注有附图标记。在图12的例子中,在该面e11使六个显示部871呈一行六列(行与列的朝向也可以是任意的。)等间隔地配置,但也可以使用其它配置。另外,在图12的例子中,与在该面e11中设置有开口部92的位置相比,在面a11的一方(在图示的例子中是z轴的正的一方)的位置配置有盖板861,但也可以使用其它配置。
249.图13是示出本发明的一实施方式的水平多关节型机器人11的壳体811中的具有显示部871的盖板861的概略的构成例的图。
250.图13是从壳体811的空心的内部观察图12所示的盖板861的情况下的图。也就是说,图12所示的盖板861的外观与图13所示的盖板861的外观是彼此位于里外的关系的外观。
251.盖板861具有框部881和基板882。
252.框部881是成为盖板861的框的部分。在图12以及图13的例子中,框部881具有长方形(或也可以是正方形。)的外形的形状,在该框部881的内部具有孔部(未图示),该孔部具有比该长方形小的相似的形状。该框部881的外形与该孔部例如成为各自的中心点重叠的配置。
253.另外,在框部881以覆盖该孔部的配置设置有基板882。框部881与基板882通过粘贴等而彼此固定并一体化。在基板882的一方的面(图12所示的面)设置有显示部871。基板882也可以具有用于使显示部871显示(在本实施方式中是发光)的电子部件,在该情况下,由图5所示的控制装置421(例如,与电源相关的驱动电源基板431以及电源转换基板432、与控制相关的控制基板433)对该电子部件(以及由此对显示部871)供给电力,并对显示部871发送用于控制显示的信号(显示控制信号)。
254.另外,框部881在该长方形的各自的顶点的近旁具有螺丝孔886(共计四个螺丝孔886)。在图13中示出了该螺丝孔886,仅在共计四个螺丝孔886之中的一个标注有附图标记。
255.另外,在壳体811中在设置盖板861的面e11设置有与该盖板861的框部881的螺丝孔886具有相同配置的同数目的螺丝孔(未图示)。
256.然后,在使壳体811与盖板861在设置于壳体811的该面e11的螺丝孔的位置和盖板861的框部881的螺丝孔886的位置重叠的状态下,通过各自的螺丝孔由螺丝862(共计四个螺丝862)紧固而固定。
257.在图12中示出了该螺丝862,仅在共计四个螺丝862之中的一个标注有附图标记。
258.并且,壳体811和盖板861例如可以使用更多的螺丝孔(以及螺丝)来固定,或也可以使用螺丝孔(以及螺丝)以外的方法来紧固。
259.在此,盖板861的框部881的材料例如可以与壳体811的材料(在壳体811中是设置该盖板861的面e11的材料)相同,或也可以是其它材料。壳体811的材料例如也可以是金属。
260.另外,在壳体811中设置该盖板861的面e11例如在安装该盖板861的部位具有由该盖板861覆盖的孔部(未图示)。
261.另外,在图12的例子中,示出了在壳体811中在与设置开口部92相同的面e11设置有盖板861的情况,但也可以在其它面设置盖板861。
262.在使用图12所示的筐体811的情况下,具有显示部871的盖板861相对于筐体811(主体)能够拆装。然后,在使该盖板861从筐体811(主体)拆下了的状态下,能够以在任意的部位以任意的朝向放置的方式进行配置。由此,能够使设置于盖板861的显示部871的显示内容(在本实施方式中是光)从任意的部位向任意的朝向输出。
263.并且,在该情况下,例如,可以使设置于盖板861的基板882的电子部件与收纳于筐体811(主体)的控制装置421(例如,驱动电源基板431、电源转换基板432、控制基板433)通过有线(布线)能够通信地连接,或也可以通过无线能够通信地连接。在使用无线的通信的
情况下,由于没有信号线,因此考虑为可提高盖板861的配置的自由度。
264.如这样,在图12的例子中,能够将具有显示部871的盖板861配置在正面、背面、它们之间的侧面e11(例如是两个五角形状的面,作为其它例子,也可以是斜面e12或连接配管51的面a11。)之中的任意的面。
265.在此,在图12的例子中,示出了在筐体811中在设置有开口部92的面e11使盖板861拆装的情况。
266.作为其它构成例,也可以在筐体811的正面、背面、它们之间的侧面之中的任意的两个以上的面设置使盖板861能够拆装的机构部(例如,与图12的例子同样的机构部),在该情况下,根据水平多关节型机器人11的使用状况(布局等)而能够在设置有该机构部的两个以上的面之中的任意的面安装具有显示部871的盖板861。并且,也可以使用在未安装具有显示部871的盖板861的该机构部安装不具有显示部的盖板(盖子那样的盖板,未图示)来堵住的那样的构成。
267.另外,在图12的例子中,在筐体811设置有显示部871,但作为其它构成例,可以在水平多关节型机器人11的任意的部位设置显示部871(例如,具有显示部871的盖板861),也可以在基台31等设置显示部871(例如,具有显示部871的盖板861)。
268.水平多关节型机器人的设置
269.参照图1对水平多关节型机器人11的设置进行说明。
270.也可以使水平多关节型机器人11在各种各样的部位以各种各样的朝向配置。
271.设置在地面等的下表面
272.作为一例,能够将水平多关节型机器人11设置在地面等的下表面。作为该地面等,例如也可以是桌子等的台子。在该情况下,例如使水平多关节型机器人11的基台31设置于地面等的下表面。
273.在该情况下,在图1所示的xyz坐标系中,从z轴的正朝向负的方向为重力的方向。当应用在一般性使用的上下左右的方向时,基台31位于下侧,壳体32位于上侧。第一臂33以及第二臂34在相对于上下方向垂直的面旋转,动作部35在上下方向直线运动。另外,在动作部35旋转的情况下,动作部35在相对于上下方向垂直的面旋转。
274.设置在天花板等的上表面
275.作为一例,能够将水平多关节型机器人11设置在天花板等的上表面。在该情况下,例如使水平多关节型机器人11的基台31设置于天花板等的上表面。
276.在该情况下,在图1所示的xyz坐标系中,从z轴的负朝向正的方向为重力的方向。当应用在一般性使用的上下左右的方向时,基台31位于上侧,壳体32位于下侧。第一臂33以及第二臂34在相对于上下方向垂直的面旋转,动作部35在上下方向直线运动。另外,在动作部35旋转的情况下,动作部35在相对于上下方向垂直的面旋转。
277.设置在墙壁等的横向面
278.作为一例,能够将水平多关节型机器人11设置在墙壁等的横向面。在该情况下,例如使水平多关节型机器人11的基台31设置于墙壁等的横向面。
279.在该情况下,在图1所示的xyz坐标系中,在xy平面包含重力的方向。当应用在一般性使用的上下左右的方向时,基台31与壳体32关于上下方向位于相同高度。第一臂33以及第二臂34在相对于墙壁等的横向面平行的面旋转,动作部35在相对于墙壁等的横向面垂直
的方向直线运动。另外,在动作部35旋转的情况下,动作部35在相对于墙壁等的横向面平行的面旋转。
280.设置在其它面
281.并且,也可以使水平多关节型机器人11设置于其它任意的面。
282.实施方式的概括
283.作为一构成例,具备基台(在图1的例子中是基台31、在图8的例子中是基台531、在图9的例子中是基台631)、设置于基台的第一臂(在图1的例子中是第一臂33、在图8的例子中是第一臂533、在图9的例子中是第一臂633)和控制第一臂的控制装置(在图5的例子中是控制装置421),是控制装置的至少一部分位于基台的内部的水平多关节型机器人(在图1的例子中是水平多关节型机器人11、在图8的例子中是水平多关节型机器人511、在图9的例子中是水平多关节型机器人611)。
284.作为一构成例,在水平多关节型机器人中,第一臂以能够绕第一旋转轴(第一臂的旋转轴)旋转的方式直接或间接地设置于基台,从第一旋转轴的轴向观察,具备具有与基台重叠的部分的第一壳体(在图1的例子中是壳体32、在图8的例子中是壳体532、在图9的例子中是壳体632、在图12的例子中是壳体811)。
285.作为一构成例,在水平多关节型机器人中,控制装置具有向驱动第一臂的第一驱动部(在图5的例子中是包含电动机控制基板451-1、放大器部453-1、电动机471-1的驱动部)供给电源的电源基板430(在图5的例子中是驱动电源基板431以及电源转换基板432),电源基板430的至少一部分(在图6的例子中是电源转换基板432)位于第一壳体的内部。
286.作为一构成例,在水平多关节型机器人中,控制装置具有控制第一驱动部的控制基板(在图5以及图6的例子中是控制基板433、在图8的例子中是控制基板591、在图9的例子中是控制基板691),控制基板位于基台的内部。
287.作为一构成例,在水平多关节型机器人中,第一驱动部位于第一壳体的内部(例如,图8的例子)。
288.作为一构成例,在水平多关节型机器人中,第一驱动部具有电动机(在图5的例子中是电动机471-1)和具有驱动电动机的驱动电路的放大器部(在图5的例子中是放大器部453-1),放大器部设置于电动机。
289.作为一构成例,在水平多关节型机器人中,具备设置于第一壳体的显示部(在图10的例子中是显示部711、在图12的例子中是显示部871)。
290.作为一构成例,在水平多关节型机器人中,显示部位于第一壳体的正面(例如,图10的例子)。
291.作为一构成例,在水平多关节型机器人中,显示部从第一旋转轴的轴向观察具有位于第一臂的可动区域内的部分(例如,图11的例子)。
292.作为一构成例,在水平多关节型机器人中,显示部的设置于第一壳体的位置能够变更(例如,图12的例子)。
293.作为一构成例,在水平多关节型机器人中,第一壳体具有开口部(在图1的例子中是开口部91、92)。
294.作为一构成例,在水平多关节型机器人中,具备设置于第一臂并能够绕第二旋转轴(第二臂的旋转轴)旋转的第二臂(在图1的例子中是第二臂34、在图8的例子中是第二臂
534、在图9的例子中是第二臂634)和连接第一壳体与第二臂的保护部件(在图1的例子中是配管51、在图8的例子中是配管551)。
295.作为一构成例,在水平多关节型机器人中,第一壳体与保护部件的第一连接位置(在图7的例子中是连接位置a1)和第二臂与保护部件的第二连接位置(在图7的例子中是连接位置a2)在第一旋转轴的轴向上的位置(在图7的例子中是基准线h1的部位的位置)相同。
296.作为一构成例,在水平多关节型机器人中,第一连接位置位于第一旋转轴的轴上(例如,图7或者图8的例子)。
297.并且,也可以将用于实现在以上所说明的装置(例如,控制装置421)中的任意的构成部的功能的程序记录(存储)在计算机能够读取的记录介质(存储介质),使计算机系统读入并执行该程序。并且,在此所说的“计算机系统”是指包含操作系统(os:operating system)或者周边设备等的硬件的系统。另外,“计算机能够读取的记录介质”是指软盘、磁光盘、rom(read only memory:只读存储器)、cd(compact disc:压缩光盘)-rom等的可移动介质、内置于计算机系统的硬盘等的存储装置。进一步地,“计算机能够读取的记录介质”是指也包含如经由互联网等的网络或者电话线路等的通信线路而发送了程序的情况下的成为服务器或者用户端的计算机系统内部的易失性存储器(ram:random access memory,随机存取存储器)那样将程序保持一定时间的介质。
298.另外,也可以使上述的程序从将该程序储存在存储装置等的计算机系统经由传输介质或者由传输介质中的传输波而向其它计算机系统传输。在此,传输程序的“传输介质”是指如互联网等的网络(通信网)或者电话线路等的通信线路(通信网)那样具有传输信息的功能的介质。
299.另外,上述的程序也可以是用于实现上述的功能的一部分的程序。进一步地,上述的程序也可以是通过与已经记录在计算机系统的程序的组合而能够实现上述的功能的程序、所谓的差分文件(差分程序)。
300.以上,参照附图对本发明的实施方式进行了详述,但具体的构成并不局限于该实施方式,也包含不脱离本发明的宗旨的范围的设计等。
301.以上的实施方式也可以适用于具有任意的构成的水平多关节型机器人。例如,水平多关节型机器人具有的动作的轴的数目也可以是任意的数目。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。