技术特征:
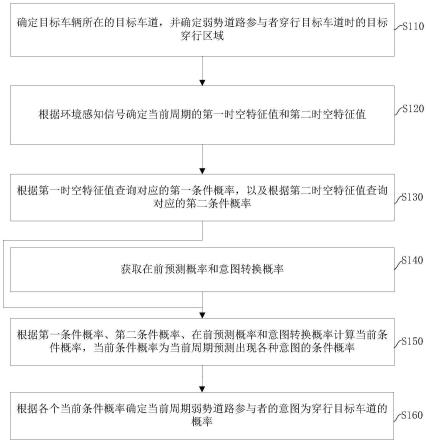
1.一种穿行概率预测方法,其特征在于,包括:确定目标车辆所在的目标车道,并确定弱势道路参与者穿行所述目标车道时的目标穿行区域;根据环境感知信号确定当前周期的第一时空特征值和第二时空特征值,所述第一时空特征值为所述目标车辆相对所述目标穿行区域的时空特征值,所述第二时空特征值为所述弱势道路参与者相对所述目标穿行区域的时空特征值;根据所述第一时空特征值查询对应的第一条件概率,以及根据所述第二时空特征值查询对应的第二条件概率,所述第一条件概率包括各种意图下出现所述第一时空特征值的条件概率,所述第二条件概率包括各种意图下出现所述第二时空特征值的条件概率;获取在前预测概率和意图转换概率,所述在前预测概率为前一周期判定的各种意图的出现概率或者出现条件概率,所述意图转换概率为前一周期各种意图转换为当前周期各种意图的转换概率;根据所述第一条件概率、所述第二条件概率、所述在前预测概率和所述意图转换概率计算当前条件概率,所述当前条件概率为当前周期预测出现各种意图的条件概率;根据各个当前条件概率确定当前周期所述弱势道路参与者的意图为穿行所述目标车道的概率。2.根据权利要求1所述的方法,其特征在于,所述根据环境感知信号确定当前周期的第一时空特征值,包括:根据环境感知信号确定所述目标车辆到所述目标穿行区域的第一距离和所述目标车辆的行驶速度;根据所述第一距离和所述目标车辆的行驶速度计算第一时间,所述第一时间为所述目标车辆行驶至所述目标穿行区域所需的时间;将所述第一距离和所述第一时间作为所述第一时空特征值。3.根据权利要求2所述的方法,其特征在于,所述根据环境感知信号确定第一时空特征值,还包括:确定是否有同向旁侧车道,所述同向旁侧车道为所述弱势道路参与者到达所述目标穿行区域前必须穿行的同向车道;在确定没有所述同向旁侧车道的情况下,或者在有所述同向旁侧车道但是所述同向旁侧车道没有在前车辆的情况下,执行将所述第一距离和所述第一时间作为所述第一时空特征值的步骤,所述在前车辆为在所述同向旁侧车道行驶并且位于所述目标车辆前方的车辆;或者,在确定有所述同向旁侧车道并且所述同向旁侧车道有在前车辆的情况下,根据环境感知信号确定第二距离,所述第二距离为所述在前车辆相对于所述目标穿行区域的纵向距离;根据所述第二距离和所述目标车辆的行驶速度计算第二时间;将所述第一距离和所述第二时间作为所述第一时空特征值。4.根据权利要求1所述的方法,其特征在于,还包括:确定是否有旁侧车道,所述旁侧车道为所述弱势道路参与者到达所述目标穿行区域前必须穿行的车道;
在确定有所述旁侧车道并且所述旁侧车道上行驶有旁侧车辆的情况下,确定旁侧穿行区域,所述旁侧穿行区域为所述弱势道路参与者穿行所述旁侧车道时的穿行区域;根据环境感知信号确定当前周期的第三时空特征值,所述第三时空特征值为行驶在所述旁侧车道的车辆相对所述旁侧穿行区域的时空特征值;根据所述第三时空特征值查询对应的第三条件概率,所述第三条件概率包括各种意图下出现所述第三时空特征值的条件概率;所述根据所述第一条件概率、所述第二条件概率、所述在前预测概率和所述意图转换概率计算当前条件概率,包括:根据所述第一条件概率、所述第二条件概率、所述第三条件概率、所述在前预测概率和所述意图转换概率计算所述当前条件概率。5.根据权利要求1所述的方法,其特征在于,所述方法还包括:确定是否有旁侧车道,所述旁侧车道为所述弱势道路参与者达到所述目标穿行区域前必须穿行的车道;在确定有所述旁侧车道并且所述旁侧车道上行驶有旁侧车辆的情况下,根据所述环境感知信号确定所述弱势道路参与者在当前周期等待穿行所述旁侧车道的第一等待概率;所述根据各个当前条件概率确定当前周期所述弱势道路参与者穿行所述目标车道的概率,包括:根据各个当前条件概率确定当前周期所述弱势道路参与者等待穿行所述目标车道的第二等待概率;根据所述第一等待概率和第二等待概率计算总体等待概率,并根据所述总体等待概率确定当前周期所述弱势道路参与者穿行所述目标车道的概率。6.根据权利要求1-5任一项所述的方法,其特征在于,根据环境感知信号确定所述第二时空特征值,包括:判断所述弱势道路参与者是否移动至所述目标穿行区域;在所述弱势道路参与者未移动至所述目标穿行区域的情况下,根据环境感知信号确定所述弱势道路参与者的移动速度和到所述目标穿行区域的第三距离;根据所述移动速度和所述第三距离计算第三时间,所述第三时间为所述弱势道路参与者移动至所述目标穿行区域的所需的时间;将所述第三距离和所述第三时间作为所述第二时空特征值。7.一种穿行概率预测装置,其特征在于,包括:基准确定单元,用于确定目标车辆所在的目标车道,并确定弱势道路参与者穿行所述目标车道时的目标穿行区域;时空特征值确定单元,用于根据环境感知信号确定当前周期的第一时空特征值和第二时空特征值,所述第一时空特征值为所述目标车辆相对所述目标穿行区域的时空特征值,所述第二时空特征值为所述弱势道路参与者相对所述目标穿行区域的时空特征值;概率查询单元,用于根据所述第一时空特征值查询对应的第一条件概率,根据所述第二时空特征值查询对应的第二条件概率,以及获取在前预测概率和意图转换概率,所述第一条件概率包括各种意图下出现所述第一时空特征值的条件概率,所述第二条件概率包括各种意图下出现所述第二时空特征值的条件概率,所述在前预测概率为前一周期判定的各种意图的出现概率或者出现条件概率,所述意图转换概率为前一周期各种意图转换为当前
周期各种意图的转换概率;当前条件概率计算单元,用于根据所述第一条件概率、所述第二条件概率、所述在前预测概率和所述意图转换概率计算当前条件概率,所述当前条件概率为当前周期预测出现各种意图的条件概率;穿行概率计算单元,用于根据各个当前条件概率确定当前周期所述弱势道路参与者的意图为穿行所述目标车道的概率。8.一种计算设备,其特征在于,包括处理器和存储器,所述存储器用于存储计算机程序;所述计算机程序在被所述处理器加载时,使所述处理器执行如权利要求1-6任一项所述的穿行概率预测方法。9.一种计算机可读存储介质,其特征在于,所述存储介质存储有计算机程序,当计算机程序被处理器执行时,使所述处理器执行如权利要求1-6任一项所述的穿行概率预测方法。10.一种自动驾驶车辆,其特征在于,包括车载控制芯片,所述车载控制芯片用于执行如权利要求1-9任一项所述的穿行概率预测方法。
技术总结
本公开实施例提供一种穿行概率预测方法、装置、设备、介质和车辆。穿行概率预测方法,包括:确定目标车道和目标穿行区域;根据环境感知信号确定当前周期的第一时空特征值和第二时空特征值;根据第一时空特征值和第二时空特征值查询对应的第一条件概率和第二条件概率;获取在前预测概率和意图转换概率;根据第一条件概率、第二条件概率、在前预测概率和意图转换概率计算当前条件概率,当前条件概率为当前周期预测出现各种意图的条件概率;根据各个当前条件概率确定当前周期弱势道路参与者的意图为穿行目标车道的概率。采用本公开实施例提供的方案能够更为精准地仿真弱势道路参与者穿行道路的情况,使得得到的穿行目标车道的概率更为准确。率更为准确。率更为准确。
技术研发人员:吴金强 刘浩泉 杨天 周小成
受保护的技术使用者:驭势(上海)汽车科技有限公司
技术研发日:2022.11.23
技术公布日:2023/3/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。