1.本发明涉及一种用于在交通工具中机电式地激活制动作用的控制系统、交通工具、用于在交通工具中机电式地激活制动作用的方法以及计算机程序产品。
背景技术:
2.由现有技术已知,交通工具在静止状态中通过所谓的停放制动调节器(或者说驻车制动调节器)固定。在此,制动作用通常被机电式地(elektromechanisch)激活,方式为激活用于施加制动力的伺服电机并且例如将制动钳固定在用于交通工具轮的制动盘上。为了冗余地固定交通工具,通常附加地设置变速器驻车锁。然而,这个变速器驻车锁产生附加的成本并且是附加的重量。
3.因此,由wo 2018 073 038 a1例如已知,设置两个控制单元,所述控制单元分别控制停放制动调节器以实现冗余。由此在控制单元之一失灵时还总可以通过另一个控制单元锁止交通工具轮之一。
4.然而,尤其当在较高的斜坡上和/或不利的条件下、例如在18%的斜坡和下雨潮湿的行车道上停放时,在只锁止一个交通工具轮的情况下交通工具可能在斜坡上滑落。这例如可能吓到用户并且需要通过制动踏板人工地制动。此外,这种人工的制动尤其在没有规定用户干预的较高自动化程度(例如等级5)的自主交通工具中是不可行的。因此期望的是,实现对至少两个交通工具轮的锁止的冗余。
技术实现要素:
5.本发明所要解决的技术问题在于,至少部分地消除前述由现有技术已知的缺点。本发明所要解决的技术问题尤其在于,在交通工具的安全性方面、优选在减少硬件使用的情况下改善交通工具的制动作用的机电式激活。
6.前述技术问题按本发明通过控制系统、交通工具、方法以及计算机程序产品解决。本发明的其它特征和细节由说明书和附图得出。在此,与按照本发明的控制系统相关地描述的特征和细节当然也与按照本发明的交通工具、按照本发明的方法和/或按照本发明的计算机程序产品相关地适用,并且相应地反之亦然,因此关于各个单独的发明方面的公开总是可以相互地引用。
7.按照本发明的第一方面,规定一种用于在交通工具中机电式地激活制动作用、尤其是用于停放过程的制动作用的控制系统。所述控制系统具有用于在交通工具的第一交通工具轮处机电式地产生第一制动力的第一伺服驱动器(stellantrieb)和用于在交通工具的第二交通工具轮处机电式地产生第二制动力的第二伺服驱动器。此外,控制系统包括用于控制系统在正常运行模式中的运行(或者说在正常运行模式中运行控制系统)的第一控制单元,在所述正常运行模式中,通过第一控制单元控制(ansteuern,或者说操控)第一伺服驱动器和第二伺服驱动器,并且控制系统包括设计用于控制第一伺服驱动器和第二伺服驱动器的、用于控制系统在紧急运行模式中的运行的第二控制单元,在所述紧急运行模式
中,通过第二控制单元控制两个伺服驱动器中的至少一个。
8.交通工具例如可以是机动车、尤其是形式为电动车。然而,同样可以考虑的是,交通工具是具有行驶机构的航空器、例如无人机或者其它的飞行设备。交通工具优选设计用于自主的、尤其是按照等级四或者等级五的自动化程度的行驶运行。
9.第一和第二伺服驱动器可以分别包括电动机。第一和第二伺服驱动器尤其可以与交通工具的制动装置的、优选液压的和/或机电式的制动单元分开地设计,以实现交通工具的停放固定(parksicherung)。第一伺服驱动器可以与交通工具的制动装置的第一轮制动器(radbremse,或者说轮子制动器)处于有效连接中或者能够被置于有效连接中,以产生第一制动力,并且第二伺服驱动器可以与制动装置的第二轮制动器处于有效连接中或者能够被置于有效连接中,以产生第二制动力。为了激活制动作用,第一和/或第二伺服驱动器可以调节分别配属的轮制动器,尤其是形式为盘式制动器和/或鼓式制动器的轮制动器。例如可以通过伺服驱动器分别将轮制动器的制动钳调节(或者说移动)到轮制动器的制动盘上。交通工具的制动作用可以由第一和第二制动力产生并且尤其包括对于交通工具的固定作用。
10.第一和第二控制单元优选分别具有自身的电路板和/或自身的处理器、尤其形式为微处理器。第一控制单元可以设计为主控制单元并且第二控制单元可以设计为从控制单元。优选通过信号连接将第一和第二控制单元分别与第一和第二伺服驱动器连接。所述信号连接可以设计为无线的或者通过电线路实现。可以考虑的是,通过第一和第二控制单元经由交通工具总线实现对第一和第二伺服驱动器的控制。
11.正常运行模式和/或紧急运行模式尤其可以包括交通工具的停放过程。因此,在交通工具应该被关闭和/或停放(或者说停泊)时,可以通过第一和/或第二控制单元实现对第一和第二伺服驱动器的控制。然而同样可以考虑的是,将制动作用用于支持坡道起步辅助装置和/或通过操作停放按钮实现的交通工具的紧急停止。
12.在紧急运行模式中可能存在控制系统的错误状态(defektzustand),在所述错误状态中,正常运行模式出现故障(或者说受干扰)。可以规定,第一和第二伺服驱动器在正常运行模式中只通过第一控制单元控制和/或在紧急运行模式中只通过第二控制单元控制。然而同样可以考虑的是,尤其根据控制系统的错误状态实现紧急运行模式中的控制。例如,在第一控制单元与第一或者第二伺服驱动器的信号连接中断的情况下,可以在紧急运行模式中通过第一和第二控制单元实现对第一和第二伺服驱动器的同步化的控制。在同步化的控制中,例如第一控制单元可以控制第一伺服驱动器并且第二控制单元可以控制第二伺服驱动器,或者相反地,第一控制单元可以控制第二伺服驱动器并且第二控制单元可以控制第一伺服驱动器。此外可以考虑的是,在紧急运行模式中通过第一和第二控制单元同时地实现对第一和/或第二伺服驱动器的控制。为此可以规定,在紧急运行模式中,将通过第一和/或第二控制单元对第一和/或第二伺服驱动器的控制区分优先等级。
13.因此,第一和第二伺服驱动器可以分别被冗余地控制,由此也能够在紧急运行模式中通过伺服驱动器施加第一和第二制动力。由此也可以在紧急运行模式中实现第一和第二交通工具轮的固定,以便例如在斜坡上和/或在不利的天气条件下可靠地制动和/或停放交通工具。由于第一和第二伺服驱动器能够分别通过第一和第二控制单元控制,所以控制系统与之相关地具有抵抗故障能力(fehlerresistenz)。在此,例如可以取消交通工具的变
速器驻车锁,由此可以减少成本和结构空间。如果第一控制单元失灵或者第一控制单元与两个伺服驱动器中的至少一个、或者与两个伺服驱动器的连接中断,则控制系统可以在紧急运行模式中运行,在所述紧急运行模式中,第二控制单元接管对第一和/或第二伺服驱动器的控制。
14.此外,在按照本发明的控制系统中可以有利地规定,所述第一控制单元和第二控制单元分别通过至少一个单独的第一连接线路与第一伺服驱动器连接并且分别通过至少一个单独的第二连接线路与第二伺服驱动器连接。因此,存在至少两个第一连接线路,所述第一连接线路分别将所述控制单元之一与第一伺服驱动器连接,并且存在至少两个第二连接线路,所述第二连接线路分别将所述控制单元之一与第二伺服驱动器连接。所述连接线路尤其是电的连接线路。例如,连接线路可以包括导体电路(leiterbahn)、线缆和/或类似线路。第一和第二伺服驱动器优选分别包括两个用于连接所述连接线路的连接接口。因此,通过连接线路可以实现改善的中断安全性,方式为对于通信路径也存在冗余。此外,通过控制单元与伺服驱动器的直接连接可以实现较高的通信速度,由此可以尤其在通过用户的感知方面改善制动特性。
15.此外,在按照本发明的控制系统中可以有利地规定,用于为第一控制单元供电的第一电压源与第一控制单元连接,并且用于为第二控制单元供电的第二电压源与第二控制单元连接。第一和第二电压源例如可以分别是交通工具电池或者相同的交通工具电池的优选单独的电池块。由此可以改善第一和第二控制单元的供电方面的冗余。例如可以在第一电压源失灵时激活紧急运行模式。
16.在按照本发明的控制系统中可以优选地规定,所述第二控制单元具有用于被动和/或主动地检测第一控制单元的错误状态的监测模块,其中优选地,第一控制单元和/或第二控制单元具有用于根据对所述错误状态的检测从正常运行模式切换至紧急运行模式的切换模块。为了被动地检测错误状态,第二控制单元可以设计用于由交通工具和/或由第一控制单元获得关于错误状态的信息。可以规定,第一控制单元设计用于识别错误状态和/或发出故障信号(或者说错误信号),以便实现通过第二控制单元对所述错误状态的被动检测。为了主动地检测错误状态,第二控制单元可以设计用于监测第一控制单元和/或第一和第二伺服驱动器。此外可以规定,第一和第二控制单元分别具有切换模块,以便触发从正常运行模式向紧急运行模式的切换。在由正常运行模式切换至紧急运行模式中时,例如可以关闭第一控制单元和/或将第二控制单元优先(或者说具有优先等级)。
17.在本发明的范围内还可以考虑的是,所述第一控制单元和第二控制单元相互具有优选直接的通信连接,用于检测错误状态和/或用于从正常运行模式切换至紧急运行模式。通信连接例如可以包括交通工具总线(bus)、直接的电连接和/或can(控制器局域网络)连接、优选形式为私有can连接。通过通信连接例如可以实现第一和第二控制单元的同步。如果通信连接是直接的通信连接,则可以与其它的交通工具系统无关地、尤其是在较短的通信路径上确保第一和第二控制单元之间的通信。
18.在按照本发明的控制系统中可以优选地规定,所述第一控制单元和/或第二控制单元具有用于识别交通工具的速度的速度模块,其中,在速度处于停放速度范围之外时,通过速度模块阻止对第一伺服驱动器和第二伺服驱动器的控制。停放速度范围优选可以包括小于或者等于15km/h、特别优选小于或者等于5km/h的交通工具速度。因此,通过速度模块
可以确保,伺服驱动器不会错误地在较高的交通工具速度中被激活。由此可以进一步提高交通工具的安全性。
19.在按照本发明的控制系统中可以优选地规定,所述第一控制单元和/或第二控制单元集成在用于控制交通工具的液压制动装置的制动器控制设备中。由此可以实现第一和/或第二控制单元对制动装置的信息的简单访问(或者说调取)。例如,制动器控制设备可以设计用于获得测量数据以确定交通工具速度。为此,制动器控制设备例如可以与用于记录第一和/或第二交通工具轮上的测量数据的测量单元连接。制动器控制设备例如可以根据制动踏板位置来控制所述制动装置。此外,制动器控制设备例如可以设计用于执行abs功能。第一和第二控制单元尤其可以共同地集成在制动器控制设备中。在此,第一和第二控制单元可以分别具有单独的印刷电路板。由于第一和第二控制单元在空间上彼此接近,通信连接例如可以具有较小的线路长度。
20.在按照本发明的控制系统中可以优选地规定,第一和/或第二控制单元集成在用于控制交通工具的优选电气的牵引驱动器的驱动器控制设备中和/或集成在用于交通工具的中央计算机中。牵引驱动器例如可以包括用于推进交通工具的电动机和/或变速器。驱动器控制设备例如可以集成在传动系和/或牵引驱动器的壳体中。可以规定,驱动器控制设备能够与交通工具的中央计算机和/或交通工具的其它控制设备连接。驱动器控制设备尤其设计用于激活、即尤其是启动电动机和/或调节电动机的功率。此外,驱动器控制设备可以设计用于获得交通工具的加速踏板和/或驾驶员辅助系统的控制指令。此外,驱动器控制设备可以设计用于交通工具的、尤其是高压部件的充电和能量管理。由于集成在驱动器控制设备中,所以诸如交通工具速度的信息能够直接地存在(或者说可用)和/或能够根据转速和/或传动比被确定。由此即使在第一控制单元失灵时,速度信息也针对第二控制单元可用,从而例如在紧急运行模式中也只在停放速度范围内激活伺服驱动器。
21.按照本发明的另一方面,规定了一种交通工具。所述交通工具具有第一交通工具轮和第二交通工具轮。此外,交通工具包括按照本发明的控制系统。
22.因此,按照本发明的交通工具具有与已经参照按照本发明的控制系统详细描述的优点相同的优点。第一和第二交通工具轮优选地是交通工具的前轮或者后轮。然而同样可以考虑的是,第一交通工具轮为前轮并且第二交通工具轮为后轮,或者反之亦然。
23.按照本发明的另一方面,规定了一种用于通过控制系统、尤其是按照本发明的控制系统在交通工具中机电式地激活制动作用的方法。所述方法包括以下步骤:
[0024]-在正常运行模式中运行控制系统,在所述正常运行模式中,通过第一控制单元控制至少一个第一伺服驱动器和第二伺服驱动器,所述第一伺服驱动器用于在交通工具的第一交通工具轮处机电式地产生第一制动力,所述第二伺服驱动器用于在交通工具的第二交通工具轮处机电式地产生第二制动力,
[0025]-检测控制系统的错误状态,在所述错误状态中正常运行模式出现故障,
[0026]-根据对所述错误状态的检测,将控制系统的运行切换至紧急运行模式,在所述紧急运行模式中,通过设计用于控制第一伺服驱动器和第二伺服驱动器的第二控制单元控制两个伺服驱动器中的至少一个。
[0027]
因此,按照本发明的方法具有与已经参照按照本发明的控制系统和/或按照本发明的交通工具详细描述的优点相同的优点。在切换之后,控制系统尤其在紧急运行模式中
运行。错误状态的检测可以有利地通过第一和/或第二控制单元实现。控制系统的运行的切换可以由第一和/或第二控制单元启动和/或执行。例如,第一控制单元可以设计为主控制单元并且在正常运行模式下被唯一地授权用于控制第一和第二伺服驱动器。此外,第二控制单元可以设计为从控制单元并且在紧急运行模式中从第一控制单元获得或者接管用于控制第一和/或第二伺服驱动器的、优选唯一的授权。
[0028]
优选地在按照本发明的方法中可以规定,通过第二控制单元主动地实现对错误状态的检测,方式为第二控制单元监测第一控制单元,和/或被动地通过第二控制单元实现对错误状态的检测,方式为第一控制单元将故障信号发送至第二控制单元。通过第二控制单元对第一控制单元的监测例如可以通过从第二控制单元向第一控制单元发送询问和/或测试信号来执行。
[0029]
按照本发明的另一方面,规定了一种计算机程序产品。所述计算机程序产品包括指令,所述指令在通过控制系统、尤其是控制系统的第一和第二控制单元执行时,促使(veranlassen)控制系统、尤其是第一和第二控制单元执行按照本发明的方法。
[0030]
因此,按照本发明的计算机程序产品具有与已经参照按照本发明的控制系统、按照本发明的交通工具和/或按照本发明的方法详细描述的优点相同的优点。所述方法尤其可以是计算机实现的方法。计算机程序产品可以实现为计算机可读的指令代码。此外,计算机程序产品可以存储在计算机可读的存储介质上,所述存储介质例如是数据盘、可移动驱动器(wechsellaufwerk)、易失性或者非易失性的存储器或者集成的存储器/处理器。此外,计算机程序产品可以是在诸如因特网的网络中能够被提供或者被提供的,用户在需要时可以从所述网络下载该计算机程序产品。计算机程序产品既可以通过软件实现,也可以通过一个或多个专用的电子电路、即在硬件中或者以任意混合的形式、即通过软件组件和硬件组件实现。
附图说明
[0031]
本发明的其它优点、特征和细节由以下描述得出,其中参照附图详细描述了本发明的实施例。在此,在权利要求和说明书中提到的特征可以分别单独地本身地或者在任意组合中对本发明是重要的。在附图中示意性地:
[0032]
图1示出了按照本发明的用于机电式地激活制动作用的控制系统在正常运行模式中运行时的情形;
[0033]
图2示出了用于机电式地激活制动作用的控制系统在紧急运行模式中运行时的情形;
[0034]
图3示出了按照本发明的交通工具,其具有在交通工具中集成的一个实施例中的控制系统;
[0035]
图4示出了按照本发明的交通工具,其具有在交通工具中集成的另一实施例中的控制系统;并且
[0036]
图5以方法步骤的示意图示出了按照本发明的方法。
[0037]
在以下针对本发明的一些实施例的描述中,对于相同的技术特征,在不同的实施例中也使用相同的附图标记。
具体实施方式
[0038]
图1示出了按照本发明的控制系统10,其用于在控制系统10在正常运行模式i中运行期间在交通工具1中机电式地激活制动作用、尤其是用于交通工具1的停放过程。按照本发明的用于通过控制系统10机电式地激活制动作用的方法100在图5中以方法步骤的示意图示出。有利地,方法100可以由控制系统10通过按照本发明的计算机程序产品的指令来执行。
[0039]
控制系统10具有用于在交通工具1的第一交通工具轮1.1上机电式地产生第一制动力的第一伺服驱动器21和用于在交通工具1的第二交通工具轮1.2上机电式地产生第二制动力的第二伺服驱动器22。第一伺服驱动器21和第二伺服驱动器22优选地是电执行器,为了产生制动力,所述电执行器分别与优选液压的、尤其是用于交通工具1的常规制动的制动装置2的轮制动器2.2(共同地)作用。第一伺服驱动器21和第二伺服驱动器22尤其可以是用于交通工具1的停放制动调节器。
[0040]
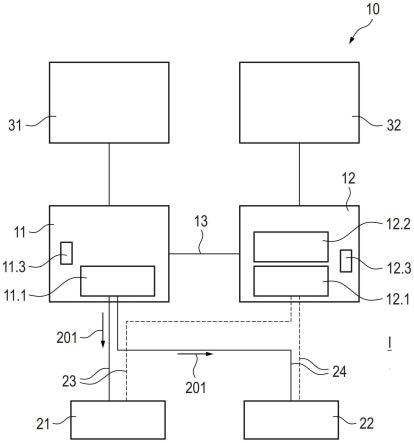
此外,控制系统10包括用于控制系统10在正常运行模式i中的运行的第一控制单元11和用于控制系统10在紧急运行模式ii中的运行的第二控制单元12。如果在方法100的范围内,在正常运行模式i中实现控制系统10的运行101,则第一伺服驱动器21和第二伺服驱动器22通过第一控制单元11控制。在紧急运行模式ii中,两个伺服驱动器21、22中的至少一个通过第二控制单元12控制。正常运行模式i在图1中示出并且紧急运行模式ii在图2中示出。在紧急运行模式ii中,两个伺服驱动器21、22优选地通过第二控制单元12控制。在此,在正常运行模式i中,用于伺服电机的伺服信号201从第一控制单元11传输到两个伺服驱动器21、22,而在紧急运行模式ii中,所述伺服信号从第二控制单元12传输到两个伺服驱动器21、22。
[0041]
为了使第一控制单元11在正常运行模式i中并且第二控制单元12在紧急运行模式ii中能够控制两个伺服驱动器21、22,第一控制单元11和第二控制单元12分别具有至少一个通往第一伺服驱动器21的单独的第一连接线路23并且分别具有至少一个通往第二伺服驱动器22的单独的第二连接线路24。因此,第一控制单元11通过第一连接线路23与第一伺服驱动器21直接连接并且通过第二连接线路24与第二伺服驱动器22直接连接。第二控制单元12通过第一连接线路23与第一伺服驱动器21直接连接并且通过第二连接线路24与第二伺服驱动器22直接连接。由此,对于第一交通工具轮1.1和第二交通工具轮1.2的制动作用可以冗余地实现。为了预防供电中断,控制系统10包括第一电压源31和第二电压源32,所述第一电压源与第一控制单元11连接,以便向第一控制单元11供电,所述第二电压源与第二控制单元12连接,以便向第二控制单元12供电。
[0042]
根据对正常运行模式i在其中出现故障的错误状态200的检测102,将控制系统10的运行切换103到紧急运行模式ii。为此,第二控制单元12具有监测模块12.2,用于被动地和/或主动地检测102第一控制单元11的错误状态200。错误状态200的检测102例如可以通过第二控制单元12主动地实现,方式为第二控制单元12监测第一控制单元11。作为补充或者备选,错误状态200的检测102也可以被动地通过第二控制单元12实现,方式为第一控制单元11将故障信号发送至第二控制单元12。为此,第一控制单元11和第二控制单元12具有彼此之间的通信连接13。通信连接13可以包括直接的电连接、交通工具1的总线和/或can连接。此外,第一控制单元11和第二控制单元12包括切换模块11.1、12.1,用于根据对错误状
态200的检测102从正常运行模式i切换103到紧急运行模式ii。例如,为了从正常运行模式i切换103到紧急运行模式ii中,可以进行第一控制单元11与第二控制单元12的协调。然而也可以考虑的是,只有第二控制单元12具有切换模块12.1,通过该切换模块,第二控制单元12可以在紧急运行模式ii中从第一控制单元11接管对第一伺服驱动器21和第二伺服驱动器22的控制。
[0043]
为了实现交通工具1的改善的安全性,第一控制单元11和第二控制单元12可以分别具有用于识别交通工具1的速度的速度模块11.3、12.3。如果速度处于停放速度范围之外、例如小于或者等于15km/h,则在此通过速度模块11.3、12.3阻止对第一伺服驱动器21和第二伺服驱动器22的控制。
[0044]
图3示出了按照本发明的交通工具1,其具有在交通工具1中集成的一个实施例中的控制系统10(或者说控制系统在一个实施例中集成到交通工具中)。在此规定,第一控制单元11集成到用于控制交通工具1的尤其是液压的制动装置2的制动器控制设备2.1中,并且第二控制单元12集成到用于控制交通工具1的电气牵引驱动器的驱动器控制设备3中。通过集成到驱动器控制设备3或者中央计算机中,可以取消用于第二控制单元12的附加控制设备。制动器控制设备2.1和/或驱动器控制设备3可以是控制系统10的部分。备选地,第二控制单元12例如可以集成到交通工具1的中央计算机中。此外可以考虑的是,第一控制单元11集成到驱动器控制设备3或者中央计算机中。
[0045]
图4示出了按照本发明的交通工具1,其具有在交通工具1中集成的另一实施例中的控制系统10。在此规定,第一控制单元11和第二控制单元12集成到制动器控制设备2.1中,所述制动器控制设备用于控制交通工具1的优选液压的制动装置2。在此,两个控制单元11、12具有彼此分隔开的印刷电路板。通过集成到制动器控制设备2.1中,两个控制单元11、12之间的通信连接13可以由于空间上的接近而具有较高的通信速度。
[0046]
因此,既能够在正常运行模式i中也能够在紧急运行模式ii中实现第一和第二交通工具轮1.2的固定,以便例如在斜坡上和/或在不利的天气条件下安全地制动和/或停放交通工具1。通过第一控制单元11和第二控制单元12,控制系统10对于两个控制单元11、12之一的失灵和/或对于控制第一伺服驱动器21和/或第二伺服驱动器22时的错误具有抵抗故障能力。如果第一控制单元11失灵或者第一控制单元11与两个伺服驱动器21、22中的至少一个的连接中断,则第二控制单元12可以在紧急运行模式ii中接管对第一和/或第二伺服驱动器22的控制。
[0047]
所述实施方式的以上阐述只在示例的范围内描述了本发明。只要在技术上有意义,实施方式的各个单独特征当然可以自由地相互组合,而不背离本发明的范围。
[0048]
附图标记清单
[0049]
1 交通工具
[0050]
1.1 第一交通工具轮
[0051]
1.2 第二交通工具轮
[0052]
2 制动装置
[0053]
2.1 制动器控制设备
[0054]
2.2 轮制动器
[0055]
3 驱动器控制设备
[0056]
10 控制系统
[0057]
11 第一控制单元
[0058]
11.1 第一控制单元11的切换模块
[0059]
11.3 速度模块
[0060]
12 第二控制单元
[0061]
12.1 第二控制单元12的切换模块
[0062]
12.2 监测模块
[0063]
12.3 速度模块
[0064]
13 通信连接
[0065]
21 第一伺服驱动器
[0066]
22 第二伺服驱动器
[0067]
23 第一连接线路
[0068]
24 第二连接线路
[0069]
31 第一电压源
[0070]
32 第二电压源
[0071]
100 方法
[0072]
101 运行控制系统10
[0073]
102 检测错误状态200
[0074]
103 切换控制系统10的运行
[0075]
200 错误状态
[0076]
201 伺服信号
[0077]
i 正常运行模式
[0078]
ii 紧急运行模式。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。