1.本发明涉及自卸车,尤其是一种纯电动宽体自卸车应急补充制动系统及方法。
背景技术:
2.随着国家大力推行绿色矿山的政策,国内矿山行业也越来越多的采用纯电动宽体自卸车。纯电动宽体自卸车行车制动系统有两套:一套是常用减速缓行的电制动系统,通过牵引电动机将机械能转化成电能并通过电机控制器整流回馈至动力电源系统;一套是采用空气作为动力源的基础机械制动系统。为适应国内运输需求,纯电动宽体自卸车的吨位也随之逐步增大,从载重60吨到载重70至75吨,电机功率也随之增加,但是后桥基础机械制动系统没有发生改变,这样正常情况下运行没问题,但当车辆满载下坡状态,在发生电制动不足或失效情况下,靠基础制动刹车可能会刹不住导致车辆失控,严重可能会导致车辆翻车或人员伤亡情况发生。
3.为了避免上述情况发生,提升制动安全性,现有纯电动宽体自卸车采用了两种常用方式:一种是在中桥和后桥的输出轴之间增加了一套电涡流缓行器,通过增加一组独立的蓄电池(24v)供电,最高提供3300n.m制动扭矩;另一种是在动力电源系统与电机控制器之间并联一组制动电阻器,当动力电源系统满电或故障时,通过制动电阻器补偿消耗回馈电能。
4.现有技术第一种方案,通过前后两个联轴节联接前后传动轴,会导致车辆运行过程中至少4%的能量传动损失,降低产品使用经济性,另外需要额外增加蓄电池作为缓行器励磁电源,需要定期检查维护蓄电池,才能保证紧急使用下的产品可靠性。现有技术第二种方案,只能用于动力电池较少或无法吸收电能下的一种补偿,当电机控制器损坏或整车断电情况下就无法工作产生电制动力。
技术实现要素:
5.本发明所要解决的技术问题是提供一种纯电动宽体自卸车应急补充制动系统及方法,补充机械制动力不足问题,提升应急制动能力;降低行驶过程中应附加应急制动而造成的能量损失;提升制动可靠性,避免因电机控制器损坏或整车断电下应急制动功能无法投入问题。
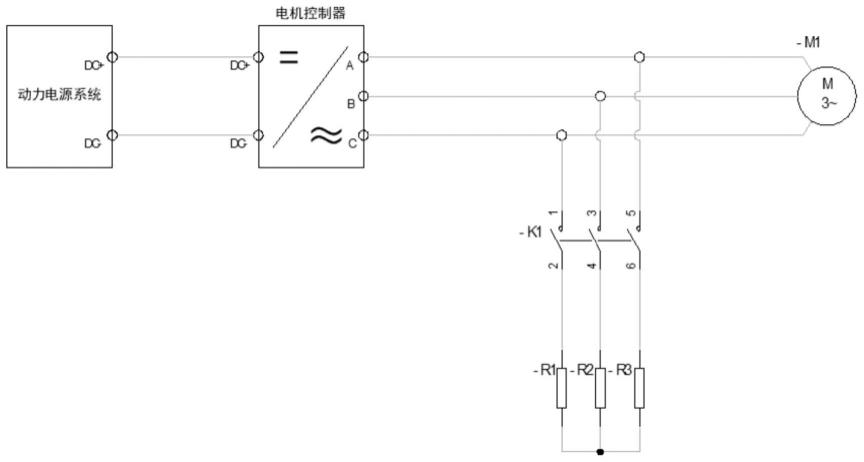
6.为解决上述技术问题,本发明的技术方案是:一种纯电动宽体自卸车应急补充制动系统,包括主电路和控制电路,所述主电路包括动力电源系统、电机控制器和永磁同步牵引电动机,所述动力电源系统通过电机控制器驱动永磁同步牵引电动机,所述主电路还包括设在电机控制器与永磁同步牵引电动机三相接线之间的制动电阻r1、r2、r3;所述控制电路包括整车控制器vcu、三线接触器k1、互为冗余的继电器km1、km2和蓄电池,所述制动电阻r1、r2、r3的一端相互连接,所述制动电阻r1、r2、r3的另一端通过三线接触器k1的常开触点分别与三相接线连接,所述三线接触器k1的线圈、蓄电池和继电器km1的线圈并联设置,所述三线接触器k1的线圈所在的支路设有继电器km1、km2的常开触点,所述继电器km1的线圈
所在的支路设有驾驶室操作开关s1,所述整车控制器vcu的控制端口1与继电器km1的线圈连接。
7.作为改进,蓄电池输出24v直流电。
8.作为改进,所述整车控制器vcu的控制端口1输出高电平。
9.作为改进,制动功率最大为275kw,制动电阻阻值0.75ω,单永磁同步牵引电动机最大功率为139kw,双永磁同步牵引电动机最大功率为278kw。
10.本发明控制方法,包括以下步骤:
11.(1)当动力电源系统电池当前soc值过高无法满功率吸收电制动电能时,启动制动电阻消耗,补偿当前电制动力;
12.(2)当主电路设备或线路故障或全车断电情况下,永磁同步牵引电动机利用转子永磁体旋转在定子绕组产生感应电动势,通过制动电阻回路形成感应电流,从而形成感应磁场,对转子产生阻力矩,以此产生电制动力。阻力矩大小和转速有关,车速越高,此时电机转速高,产生的阻力矩越大,对车辆应急制动力补偿越好;当车速降低,电机转速降低,车辆处于可控安全状态,产生的阻力矩也会减小,适应整车对应急制动补充力的需求。
13.作为改进,具体两种控制方式:
14.(1)当整车控制器vcu功能正常并检测到主回路异常无法实现电制动能量回馈至动力电源系统时,整车控制器vcu通过控制端口1输出高电平控制继电器km1、km2的线圈得电,使继电器km1、km2的常开触点闭合,三相接触器k1的线圈得电,三相接触器k1的常开触点闭合,制动电阻r1、r2、r3投入;
15.(2)当整车控制器vcu无法发送指令情况下,司机操作驾驶室操作开关s1,通过硬线方式给继电器km1、km2的线圈供电,使继电器km1、km2的常开触点闭合,三相接触器k1的线圈得电,三相接触器k1的常开触点闭合,制动电阻r1、r2、r3投入。
16.本发明与现有技术相比所带来的有益效果是:
17.1、补充机械制动力不足问题,提升应急制动能力;
18.2、降低行驶过程中应附加应急制动而造成的能量损失;
19.3、提升制动可靠性,避免因电机控制器损坏或整车断电下应急制动功能无法投入问题。
附图说明
20.图1为主电路图。
21.图2为控制电路图。
22.图3为电机参数模型设置图。
23.图4为系统仿真模型图。
24.图5为牵引电机转速2000r/mim状态下仿真电机轴端功率曲线图。
25.图6为牵引电机转速2000r/mim状态下仿真电机轴端扭矩曲线图。
26.图7为牵引电机转速1200~2000r/mim状态下仿真不同转速下的电机轴功率曲线图。
27.图8为电涡流提供的制动力矩和功率。
具体实施方式
28.下面结合说明书附图对本发明作进一步说明。
29.一种纯电动宽体自卸车应急补充制动系统,包括主电路和控制电路。如图1所示,所述主电路包括动力电源系统、电机控制器和永磁同步牵引电动机,所述动力电源系统通过电机控制器驱动永磁同步牵引电动机,所述主电路还包括设在电机控制器与永磁同步牵引电动机三相接线之间的制动电阻r1、r2、r3。如图2所示,所述控制电路包括整车控制器vcu、三线接触器k1、互为冗余的继电器km1、km2和蓄电池,所述制动电阻r1、r2、r3的一端相互连接,所述制动电阻r1、r2、r3的另一端通过三线接触器k1的常开触点(1,2;3,4;5,6)分别与三相接线连接,所述三线接触器k1的线圈、蓄电池和继电器km1的线圈并联设置,所述三线接触器k1的线圈所在的支路设有继电器km1、km2的常开触点(1,2;3,4),所述继电器km1的线圈所在的支路设有驾驶室操作开关s1,所述整车控制器vcu的控制端口1与继电器km1的线圈连接,整车控制器vcu的控制端口2通过三线接触器k1的常开触点(13,14)与蓄电池连接。
30.本发明制动控制方法,包括以下步骤:
31.(1)当动力电源系统电池当前soc值过高无法满功率吸收电制动电能时,启动制动电阻消耗,补偿当前电制动力;
32.(2)当主电路设备或线路故障或全车断电情况下,永磁同步牵引电动机利用转子永磁体旋转在定子绕组产生感应电动势,通过制动电阻回路形成感应电流,从而形成感应磁场,对转子产生阻力矩,以此产生电制动力。阻力矩大小和转速有关,车速越高,此时电机转速高,产生的阻力矩越大,对车辆应急制动力补偿越好;当车速降低,电机转速降低,车辆处于可控安全状态,产生的阻力矩也会减小,适应整车对应急制动补充力的需求。
33.本发明控制策略:k1为制动主电路三相接触器;km1、km2为控制电路继电器,互为冗余设计;s1为司机手动操作开关;蓄电池为整车提供24v应急用电源。
34.具体两种控制方式:
35.(1)当整车控制器vcu功能正常并检测到主回路异常无法实现电制动能量回馈至动力电源系统时,整车控制器vcu通过端口1输出高电平控制继电器km1、km2的继电器线圈得电,从而使km1、km2的常开触点(1,2;3,4)闭合,三相接触器k1的线圈得电,三相接触器k1的常开触点(1,2;3,4;5,6)闭合,制动电阻r1、r2、r3投入;
36.(2)当整车控制器vcu无法发送指令(如整车断电情况),司机可以操作手动开关s1,通过硬线方式给继电器km1、km2的线圈供电,从而使继电器km1、km2的常开触点(1,2;3,4)闭合,三相接触器k1的线圈得电,三相接触器k1的常开触点(1,2;3,4;5,6)闭合,制动电阻r1、r2、r3投入。
37.仿真说明:基于amesim软件,引用hc105e纯电宽体自卸车所配绿控电驱动系统中牵引电机参数进行仿真计算,求取所配制动电阻器需求参数。
38.一、电机参数模型:电机为永磁同步电机,额定功率为220kw。如图3所示,搭建模型所需电机基本参数:直轴电感、交轴电感、定子相电阻、磁通、极对数、初始角等。
39.二、如图4所示,搭建系统模型。
40.三、运行参数设置:车辆行驶速度不超过30km/h,应急补充制动主要用于车辆重载下坡工况,因电制动不足或失效必须使用基础制动将车辆刹停,应急制动作为补充制动的
一种方式,理想状态应全速范围内提供可靠的制动扭矩或制动功率。两种情况:一是变速箱控制正常,可根据车速执行降档操作,此时牵引电机转速维持在2000r/min左右;一种是变速箱异常卡死在某一固定档位,电机转速随车速降低而降低;15km/h车速时,假设变速箱卡在5档,此时电机转速最小,为1200r/min。本仿真计算研究车速高于15km/h,应急补充制动力应足够有效。
41.研究制动电阻器阻值不同时,电制动功率大小,单相阻值选取0.5ω、0.75ω、1ω、1.25ω。
42.四、仿真结果:
43.如图5、6所示,牵引电机转速2000r/mim状态下仿真结果:
44.r=1.25ω时,电机轴端稳定功率:-112kw,扭矩:533n.m;
45.r=1ω时,电机轴端稳定功率:-128kw,扭矩:610n.m;
46.r=0.75ω时,电机轴端稳定功率:-139kw,扭矩:664n.m;
47.r=0.5ω时,电机轴端稳定功率:-132kw,扭矩:632n.m。
48.如图7所示,牵引电机转速1200~2000r/mim状态下仿真结果:研究牵引电机在不同转速下,轴功率随转速变化情况。
49.数据对比和结论:如图8所示,电涡流提供的制动力矩和功率,按等比例计算,目前装在105纯电动宽体自卸车上的制动功率最大为275kw。上述是根据绿控双电机动力系统参数进行仿真分析,选择制动电阻阻值0.75ω,单电机最大功率为139kw,双电机为278kw,满足替代电涡流功率需求。车速不同情况下,两种方式的制动功率基本呈线性变化,本方案斜率更小,相对更优。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。