1.本发明涉及管道除蚀的技术领域,特别涉及一种管道除蚀机器人。
背景技术:
2.因为金属管道的结构稳定、制作工艺成熟等特殊优越性,金属管道仍然是最受欢迎的管道类型,而为了保证管道的使用寿命,则必须对管道进行维护和清理。
3.譬如管道在使用一端时间后,管道内壁会出现各种锈斑和残留一些杂质,这就需要对管道内壁进行除锈和清理工作,传统的除锈和除杂方式大多采用打磨和纯化学方法除锈,打磨除锈不仅效率低,而且还需要投入大量的劳动力;纯化学除锈会对环境造成污染。
4.即单纯利用其中任意种方法均无法获得满意的除锈效果,但现有技术目前也无法同时将两种除锈方式进行结合应用,所以研发一种能够利用两种方式实现同步除锈的机器人已经成为一个亟待解决的技术问题。
技术实现要素:
5.本发明的目的在于提供一种管道除蚀机器人,以解决现有技术无法同时将两种除锈方式进行结合应用的问题。
6.为了解决上述技术问题,本发明提供了一种管道除蚀机器人,包括除蚀液存贮罐和移动小车;所述除蚀液存贮罐设于所述移动小车上;所述移动小车的车头处活动连接有角度可调控的活动杆,所述活动杆的端部设有转动可控的毛刷,所述毛刷排布为环状,所述毛刷包围的空间内设有高压除蚀液喷射管,所述高压除蚀液喷射管的进液端与所述除蚀液存贮罐的内部导通,所述高压除蚀液喷射管用于抽取除蚀液进行喷射。
7.在其中一个实施例中,所述移动小车内部设有第一电机,所述第一电机与所述活动杆传动连接,所述第一电机用于驱动所述活动杆自转。
8.在其中一个实施例中,所述活动杆包括相互连接的第一杆段和第二杆段;所述第一杆段斜向往上延伸布置,所述第一杆段的下端与所述第一电机传动连接,所述第一杆段用于在所述第一电机的驱动下自转,所述第一杆段的上端与所述第二杆段连接为钝角状;所述第二杆段上设有所述毛刷和所述高压除蚀液喷射管。
9.在其中一个实施例中,所述第一杆段与所述第二杆段之间为转动连接,所述第一杆段与所述第二杆段的转动连接处设有第二电机,所述第二电机与所述第二杆段传动连接,所述第二电机用于驱动所述第二杆段转动。
10.在其中一个实施例中,所述活动杆的端部设有转盘和第三电机;所述转盘上设有所述毛刷和高压除蚀液喷射管;所述第三电机与所述转盘传动连接,所述第三电机用于驱动所述转盘自转。
11.在其中一个实施例中于,所述移动小车的车头处以相同方式活动连接有多根所述活动杆,多根所述活动杆上均以相同的方式设置有所述毛刷和高压除蚀液喷射管。
12.在其中一个实施例中于,所述除蚀液存贮罐接通有除蚀液传输管,所述除蚀液传
输管的接口设于所述移动小车的外部。
13.在其中一个实施例中,所述移动小车的车头处设有摄像头。
14.在其中一个实施例中,所述移动小车的车头处设有红外检测镜头。
15.在其中一个实施例中,所述移动小车的外部设有通信天线。
16.本发明的有益效果如下:
17.由于所述活动杆的端部设有转动可控的毛刷,所以通过控制毛刷转动则可实现对锈迹的物理清除,而所述毛刷包围的空间内设有高压除蚀液喷射管,所述高压除蚀液喷射管的进液端与所述除蚀液存贮罐的内部导通,所述高压除蚀液喷射管用于抽取除蚀液进行喷射,则可利用除蚀液对锈迹进行化学除锈,在两种除锈方式的结合应用下,将大大优化除锈效果,即切实解决了现有技术无法同时将两种除锈方式进行结合应用的问题。
附图说明
18.为了更清楚地说明本发明的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.图1是本发明实施例提供的侧视结构示意图;
20.图2是本发明实施例提供的正视结构示意图;
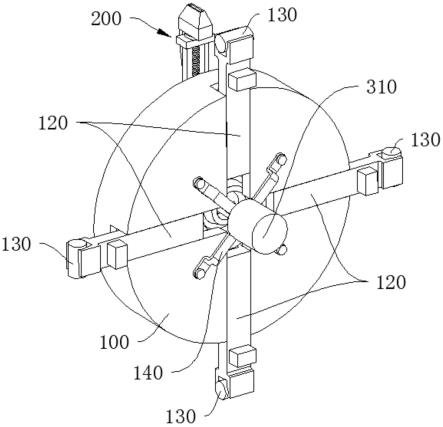
21.图3是本发明实施例提供的后视结构示意图。
22.附图标记如下:
23.10、除蚀液存贮罐;11、除蚀液传输管;
24.20、移动小车;
25.30、活动杆;31、第一杆段;32、第二杆段;
26.41、毛刷;42、高压除蚀液喷射管;43、转盘;
27.51、摄像头;52、红外检测镜头;53、通信天线;54、信号传输线缆。
具体实施方式
28.下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述。
29.本发明提供了一种管道除蚀机器人,其实施例如图1至图3所示,包括除蚀液存贮罐10和移动小车20;除蚀液存贮罐10设于移动小车20上;移动小车20的车头处活动连接有角度可调控的活动杆30,活动杆30的端部设有转动可控的毛刷41,毛刷41排布为环状,毛刷41包围的空间内设有高压除蚀液喷射管42,高压除蚀液喷射管42的进液端与除蚀液存贮罐10的内部导通,高压除蚀液喷射管42用于抽取除蚀液进行喷射。
30.在进行应用时,先在除蚀液存贮罐10内存储足够的除蚀液,然后控制移动小车20进行移动,直至移动小车20到达需要进行除锈操作的位置,则可控制高压除蚀液喷射管42从除蚀液存贮罐10内抽取除蚀液对锈迹进行高压喷射,与此同时,毛刷41的高速转动将可对锈迹实现同步清除操作;更具体的除锈方式可以是高压除蚀液喷射管42工作后延时10秒,然后再利用毛刷41进行物理除锈,而且在整个除锈过程中,除锈角度的调控则通过调节活动杆30的角度实现调控。
31.显而易见的,此实施例在两种除锈方式的结合应用下,将大大优化除锈效果,即切实解决了现有技术无法同时将两种除锈方式进行结合应用的问题。
32.需要指出,为了实现高压除蚀液喷射管42的喷射操作,可在高压除蚀液喷射管42与除蚀液存贮罐10接通的通路上设置相应的泵体,以便泵体将除蚀液存贮罐10内的除蚀液抽送至高压除蚀液喷射管42进行喷射;其中,此时的除蚀液存贮罐10设于移动小车20内部即可。
33.还需指出,高压除蚀液喷射管42与除蚀液存贮罐10之间为管路接通,两者之间的连接管路可以是外置设计,譬如将相关管路外露于活动杆30外,并将相关管路绑定在活动杆30外即可;而此实施例为了对相关管路进行保护,则在活动杆30内部挖空形成相应的管腔,以便将相关管路内藏于相应的管腔内。
34.如图1所示,此实施例优选设置移动小车20内部设有第一电机(隐藏于移动小车20内),第一电机与活动杆30传动连接,第一电机用于驱动活动杆30自转;譬如利用第一电机的输出轴与活动杆30利用联轴器进行同轴连接即可。
35.在采用此设置方式后,则可利用第一电机驱动活动杆30以轴a为转动中心进行自转,从而满足了在第一个维度上的除锈角度调节需求。
36.如图1和图2所示,此实施例优选设置活动杆30包括相互连接的第一杆段31和第二杆段32;第一杆段31斜向往上延伸布置,第一杆段31的下端与第一电机传动连接,第一杆段31用于在第一电机的驱动下自转,第一杆段31的上端与第二杆段32连接为钝角状;第二杆段32上设有毛刷41和高压除蚀液喷射管42。
37.在采用此设置方式后,将使得毛刷41和高压除蚀液喷射管42的默认设置角度更为合理,即使在无需进行角度调节的情况下,也可以满足大部分情况的除锈清洁需求。
38.如图1所示,此实施例优选设置第一杆段31与第二杆段32之间为转动连接,第一杆段31与第二杆段32的转动连接处设有第二电机,第二电机与第二杆段32传动连接,第二电机用于驱动第二杆段32转动;其中,第二电机可以直接外露于第一杆段31与第二杆段32的转动连接处,也可以设置相关遮盖结构进行隐藏保护,而为了实现相应的转动控制,只需利用第二电机连接第二杆段32相应的转动轴即可。
39.在采用此设置方式后,则可利用第二电机驱动第二杆段32以轴b为转动中心进行自转,从而满足了在第二个维度上的除锈角度调节需求。
40.其中,还需要保证第一杆段31与第二杆段32旋转的稳定性,譬如使用硬质金属制作活动杆30以保证其机械强度,并且在第一杆段31与第二杆段32转动连接处设置有编码器,编码器用于实时反馈两者形成的角度,编码器的一边与第一杆段31连接固定,编码器的另一边与第二杆段32连接固定,从而便于输出运动控制指令驱使第一杆段31和第二杆段32执行预设运动,以判断是否产生了移动。
41.如图1和图2所示,此实施例优选设置活动杆30的端部设有转盘43和第三电机;转盘43上设有毛刷41和高压除蚀液喷射管42;第三电机与转盘43传动连接,第三电机用于驱动转盘43自转;其中,此时第三电机可以安装于活动杆30上,但为了简洁反映方案的结构,所以第三电机未直接绘制于图纸上。
42.在采用此设置方式后,则可利用第三电机驱动转盘43以轴c为转动中心进行自转,从而满足了控制毛刷41进行高速转动的需求。
43.如图1和图2所示,此实施例优选设置移动小车20的车头处以相同方式活动连接有多根活动杆30,多根活动杆30上均以相同的方式设置有毛刷41和高压除蚀液喷射管42,具体的,此实施例将活动杆30的数量设置为两根,从而扩大了除锈范围,以及提高了除锈效率。
44.如图3所示,此实施例优选设置除蚀液存贮罐10接通有除蚀液传输管11,除蚀液传输管11的接口设于移动小车20的外部。
45.在采用此设置方式后,则可利用除蚀液传输管11与外部进行连接,以此持续获取除蚀液,从而使得长时间的除锈操作能够得以实现。
46.如图2所示,此实施例优选设置移动小车20的车头处设有摄像头51。
47.在采用此设置方式后,则可利用摄像头51及时拍摄管道内的环境,从而便于进行更为准确的调控,以此提高除锈效率。
48.如图2所示,此实施例优选设置移动小车20的车头处设有红外检测镜头52。
49.在采用此设置方式后,红外检测镜头52在昏暗环境依然能够实现障碍物的检测,从而避免了移动小车20的移动受阻,也便于及时进行相关操作以对障碍物进行清除。
50.如图1至图3所示,此实施例优选设置移动小车20的外部设有通信天线53。
51.在采用此设置方式后,则可利用通信天线53与外界进行信号传输,从而使得管道除蚀机器人能够利用遥控的方式实现操作,也便于将获得的各种信息发及时送达相关人员。
52.而且此时移动小车20上还保留来了信号传输线缆54,以便于供操作人员选择利用信号传输线缆54实现有线传输控制。
53.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。