1.本实用新型属于传感器领域,更具体地,涉及一种万向感知装置。
背景技术:
2.目前,在泵车的布料管的随动系统中,需要在布料管这种圆柱形物品的外侧设置一种可操作布料管在平面的任意方向上移动的操作机构。
3.传统的方法通常是在布料管外侧安装一套万向摇柄,通过操作万向摇柄使布料管随着万向摇柄控制的方向移动,由于泵车运行过程中,布料管在水平方向和竖直方向上均存在较大的抖动,而万向摇柄可供抓取的区域很小,但是操作人员需始终紧握万向摇柄来控制布料管的运动,因此,单靠操作人员操作万向摇柄来控制布料管的随动,技术难度很高。此外,带万向摇柄的操控系统只能布置在布料管外的某个方位,占用较大的径向空间的同时,操作人员不能在任意方向控制万向摇柄,只能在万向摇柄所在的位置来操控万向摇柄,灵活性和机动性较差。
技术实现要素:
4.针对现有技术的以上缺陷或改进需求,本实用新型提供了一种万向感知装置,在布料管外围设置万向感知装置,通过对施力筒施加推力,即可感知力,便于操控布料管。
5.为实现上述目的,按照本实用新型,提供了一种万向感知装置,其特征在于,包括底座、二维力传感器、施力筒和支撑筒,其中:
6.所述二维力传感器包括内环体、外环体、连接梁和电阻应变片,所述外环体安装在所述底座上,所述外环体和内环体同轴设置并且所述外环体围住所述内环体,所述外环体与内环体之间存在空隙并且所述空隙处周向均匀布置四根所述连接梁,每根所述连接梁的一端固定连接内环体而另一端固定连接外环体,所述内环体上安装所述施力筒并且所述内环体与所述施力筒同轴设置;
7.每根所述连接梁上分别安装两个所述电阻应变片,并且在连接梁受力弯曲时,其中一个所述电阻应变片受拉力而另一个电阻应变片受压力;
8.所述支撑筒的一端安装在所述底座上,以用于连接外部的圆柱形物品;
9.所述施力筒与所述支撑筒同轴布置,所述施力筒围住所述支撑筒并且两者之间存在间隙。
10.优选地,还包括密封组件,所述密封组件包括连接环和密封圈,所述连接环安装在所述支撑筒远离底座的一端,并且所述连接环围住所述支撑筒,所述密封圈安装在所述连接环的外侧并且抵在所述施力筒的内壁上。
11.优选地,所述连接环上设置有夹持组件a,所述夹持组件a夹持住所述支撑筒的一端。
12.优选地,所述夹持组件a为螺纹安装在所述连接环上的多根螺栓a并且这些螺栓a周向均匀布置,以用于抵靠在所述支撑筒的外侧来配合夹持所述支撑筒。
13.优选地,所述外环体可拆卸安装在所述底座上。
14.优选地,所述施力筒可拆卸安装在所述内环体上。
15.优选地,所述底座上设置有夹持组件b,所述夹持组件b夹持住所述支撑筒的一端。
16.优选地,所述夹持组件b为螺纹安装在所述底座上的多根螺栓b并且这些螺栓b周向均匀布置,以用于抵靠在所述支撑筒的外侧来配合夹持所述支撑筒。
17.优选地,所述支撑筒的每一端分别设置有夹持组件c,以用于夹持圆柱形物品。
18.优选地,所述夹持组件c为螺纹安装在所述支撑筒上的多根螺栓c并且这些螺栓c周向均匀布置,以用于抵靠在圆柱形物品的外侧来配合夹持圆柱形物品。
19.总体而言,通过本实用新型所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
20.1)本实用新型可使操作人员在圆柱形物品的周向的任意位置来对施力筒进行无障碍操作,由于施力筒具有一定的高度,在圆柱形物品的上下抖动过程中,操作人员的手可始终与施力筒保持接触,进而可随时对圆柱形物品的运动方向进行控制,操控灵活性和机动性高。同时,施力筒的操作过程中,只需对其提供径向力即可,无需对其保持抓取状态,所以圆柱形物品在轴向和径向的抖动对操作人员的操作难度影响不大,进而极大的降低操作难度。
21.2)本实用新型采用支撑筒和施力筒这样的筒状结构安装于圆柱形物品外侧,对沿圆柱形物品径向的空间的占用极小。
附图说明
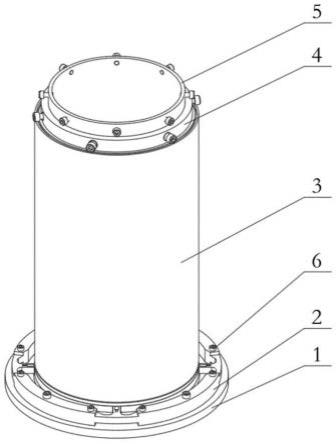
22.图1是本实用新型的立体图;
23.图2是本实用新型中底座的立体图;
24.图3是本实用新型中二维力传感器的立体图;
25.图4是本实用新型中施力筒的立体图;
26.图5本实用新型中密封组件的立体图;
27.图6本实用新型中支撑筒的立体图;
28.图7是圆柱形物品安装在本实用新型上的立体图;
29.图8是圆柱形物品安装在本实用新型上的剖示图。
具体实施方式
30.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。此外,下面所描述的本实用新型各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
31.参照图1~图8,一种万向感知装置,包括底座1、二维力传感器2、施力筒3和支撑筒5,其中:
32.所述底座1优选采用环体结构,并且由一体成型的上环体102和下环体103组成,上环体102位于下环体103的上方并且上环体102的外径大于下环体103。
33.所述二维力传感器2包括内环体201、外环体202、连接梁203和电阻应变片,所述外
环体202安装在所述底座1,所述外环体202与所述内环体201同轴设置并且所述外环体202围住所述内环体201,所述内环体201与外环体202之间存在空隙并且所述空隙处周向均匀布置有四根连接梁203,每根所述连接梁203的一端固定连接内环体201而另一端固定连接外环体202,所述外环体202优选可拆卸安装在所述底座1上,具体地,上环体102上设置有竖直的螺纹孔,外环体202通过竖直的螺钉6安装在底座1的上环体102上,所述底座1为二维力传感器2提供支撑。
34.所述内环体201上安装所述施力筒3并且所述内环体201与所述施力筒3同轴设置,施力筒3是用来受外力的。所述施力筒3优选可拆卸安装在所述内环体201上,具体地,内环体201上设置有竖直的螺纹孔,施力筒3的下端设置有连接法兰301,连接法兰301与内环体201通过竖直的螺栓连接。
35.每根所述连接梁203上分别安装两个所述电阻应变片,并且在连接梁203受力弯曲时,其中一个所述电阻应变片受拉力而另一个电阻应变片受压力;参见图3,本实用新型优选在每个矩形的连接梁203的顶面和底面上分别布置电阻应变片。通过连接梁203的弯曲带动电阻应变片电阻变化,可以感知所述施力筒3受到的径向力(该径向力是沿施力筒3径向的力,且施力筒3上的径向力会使连接梁203弯曲而转变为连接梁203的扭矩,进而对电阻应变片产生拉伸和压缩作用)。具体地,由于施力筒3安装在内环体201上,施力筒3受力时,内环体201也会受力,内环体201受力会让连接梁203有微小的弯曲,连接梁203弯曲后,连接梁203上的一个电阻应变片受拉力而另一个电阻应变片受压力,电阻应变片受拉时电阻变大,受压时电阻变小。本实用新型采用四根连接梁203及八个应变片,可以构成全桥电路的一部分,方便电路计算。
36.所述支撑筒5的一端安装在所述底座1上,以用于连接外部的圆柱形物品7,理论上来讲,圆柱形物品7可以安装在支撑筒5的任意位置,本实用新型优选同轴安装,并且圆柱形物品7穿过支撑筒5而被支撑筒5所围住。
37.所述施力筒3与所述支撑筒5同轴布置,所述施力筒3围住所述支撑筒5并且两者之间存在间隙,则施力筒3的底部与二维力传感器2的内环体201相固连,顶部与密封组件4的密封圈401相接触,呈悬臂梁结构。所述二维力传感器2和施力筒3不与支撑筒5相接触。
38.施力筒3由于是筒状结构,可360
°
施加径向的各个方向的作用力,使得电阻应变片可万向感知,具有结构紧凑、操作简单、操作范围广和可靠性高等功能。当施力筒3受到外力时,二维力传感器2上的电阻应变片受力变形,进而感知施力筒3上的作用力并传给控制系统,由控制系统计算作用力的方向和大小,进而实现对外力的感知。控制系统根据力的反馈驱动动力机构工作,动力机构通过传动系统带动圆柱形物品随二维力传感器2感知的径向力的方向运动。譬如,如果圆柱形物品是泵车上的布料管,则控制系统控制泵车的臂架运动,进而实现布料管随二维力传感器2感知的径向力的方向运动。
39.进一步,本实用新型还包括密封组件4,所述密封组件4包括连接环403和密封圈401,所述连接环403安装在所述支撑筒5远离底座1的一端支撑筒5的上端,并且所述连接环403围住所述支撑筒5,所述密封圈401安装在所述连接环403的外侧并且抵在所述施力筒3的内壁上。所述连接环403上设置有夹持组件a,所述夹持组件a夹持住所述支撑筒5的一端,从而将连接环403安装在支撑筒5上。上述的夹持组件a可采用现有的其它夹持结构,只要能夹持住物体即可。优选地,所述夹持组件a为螺纹安装在所述连接环403上的多根螺栓a402
并且这些螺栓a402周向均匀布置,以用于抵靠在所述支撑筒5的外侧来配合夹持所述支撑筒5。螺栓a402水平设置。所述连接环403与支撑筒5之间采用间隙配合,在保证两者之间同轴度的同时,方便连接环403安装到支撑筒5上,通过拧紧密封组件4上的螺栓a402,实现密封组件4与支撑筒5之间的紧固。密封圈401外侧与施力筒3的内壁相接触,使得施力筒3内部呈密封结构,从而具备防水和防尘功能。当螺栓a402未锁紧时,密封组件4可以在支撑筒5上轴向移动和转动,从而实现位置的调整。
40.进一步,所述底座1上设置有夹持组件b,所述夹持组件b夹持住所述支撑筒5的一端。上述的夹持组件b可采用现有的其它夹持结构,只要能夹持住物体即可。优选地,所述夹持组件b为螺纹安装在所述底座1上的多根螺栓b101并且这些螺栓b101周向均匀布置,以用于抵靠在所述支撑筒5的外侧来配合夹持所述支撑筒5。螺栓b101水平设置,优选安装在底座1的下环体103上。所述底座1与支撑筒5之间采用间隙配合,在保证两者之间同轴度的同时,方便底座1的安装,通过拧紧底座1上的螺栓b101,实现底座1与支撑筒5之间的紧固。当螺栓b101未锁紧时,底座1可以在支撑筒5的轴向移动和转动,从而实现位置的调整。
41.进一步,所述支撑筒5的每一端分别设置有夹持组件c,以用于夹持圆柱形物品7。上述的夹持组件c可采用现有的其它夹持结构,只要能夹持住物体即可。优选地,所述夹持组件c为螺纹安装在所述支撑筒5上的多根螺栓c501并且这些螺栓c501周向均匀布置,以用于抵靠在圆柱形物品7的外侧来配合夹持圆柱形物品7。螺栓c501水平设置。支撑筒5作为本实用新型的支撑件,其位于中心位置,所述支撑筒5可套在外径略小于支撑筒5内径的圆柱形物品7上,支撑筒5顶端和底端均设置夹持组件c来夹持圆柱形物品7,当螺栓c501未拧紧时,可实现支撑筒5在圆柱形物品7上的轴向移动和转动,当运动至安装位置时,拧紧螺栓c501,夹紧圆柱形物品7,实现本万向感知装置在圆柱形物品7上的安装,譬如本实用新型可套在在泵车的圆柱形的布料管上,可实现本万向感知装置穿装在布料管上。
42.本领域的技术人员容易理解,以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
