1.本发明涉及物联网技术领域,具体的是一种基于物联网的智能交通调度系统。
背景技术:
2.目前智慧交通调度所使用的技术手段包括两种,一种是利用定位导航(包括gprs定位系统或者北斗定位系统),另一种是通过图像算法。在图像算法上,一般采用的都是基于神经网络模型,比如:公开号为“cn111737006a”公开了一种全网络交通调度优化方法,所述全网络交通调度优化方法包括:搭建分布式gpu调度集群,并基于梯度下降算法训练所述分布式gpu调度集群得到分布式交通识别模型,每个gpu对应一个交通路口;获取所有交通路口的图像采集设备采集的环境图像;根据交通路口的标识信息将所述环境图像分发给与所述交通路口对应的gpu;通过所述gpu调用所述交通识别模型识别所述环境图像得到交通路口的交通拥挤程度;根据所有交通路口的交通拥挤程度及对应的交通路口标识对交通进行调度优化。
3.在上述中,图像处理是基于训练交通识别模型得到。 这种方式需要基于历史数据来构建训练交通识别模型,且模型需要进行大量的训练才能使用,从技术手段上来讲,通过构建训练模型更加的复杂。
技术实现要素:
4.有鉴于此,本发明的主要目的在于提供一种智能交通调度系统。
5.本发明采用的技术方案如下:
6.本发明提供了一种智能交通调度系统,包括:
7.设置多个智能调度节点,将每一智能调度节点部署在每一交通汇聚处,
8.每一所述智能调度节点被配置成:
9.图像采集模块,用于获取每一交通汇聚处每一通行线路上单位时间内的第一监测图像和第二监测图像;
10.图像处理模块,用于基于第一监测图像和第二监测图像二值化处理来来获取每一交通汇聚处每一通行线路的通行流量和通行速度;
11.逻辑控制部,用于基于每一交通汇聚处每一通行线路的通行流量和通行速度来综合判断当前的信号灯的第一控制逻辑方案是否满足当前的通行流量,如不满足,则由控制逻辑部根据判断结果对应的选择对应的第二控制逻辑方案对每一交通汇聚处每一通行线路的交通灯进行调控。
12.进一步地,每一所述每一智能调度节点连接至调度服务器,所述智能调度节点基于物联网技术将每一智能调度节点的调度方案传递至调度服务器。
13.进一步地,将交通汇聚点划分为汇聚区,以及与汇聚区对接的至少两条通行路线,沿每一通行路线的边侧至少设置有第一监控摄像机和第二监控摄像机;将第二监控摄像机设置在汇聚区与通行路线的交汇处,将第一监控摄像机设置在第二监控摄像机的前端,且
第一监控摄像机和第二监控摄像机之间的距离为100-500米;其中,设置第一监控摄像机和第二监控摄像机的广角范围,其中,第一监控摄像机用于获取通行路线设定区域的第一监控图像;第二监控摄像机用于获取汇聚区前部通行路线设定区域的第二监控图像;
14.在第一监控摄像机和第二监控摄像机处均设置有通信模块,通过通信模块与智能调度节点以及调度服务器进行通信。
15.进一步地,所述图像处理模块具有:
16.处理部,具有多个处理组合单元,基于时序将第一监控图像和第二监控图像作为一个处理组合输入至每一处理组合单元,且每一处理组合单元具有第一处理核和第二处理核;
17.第一处理核具有第一基准图像、第一识别单元和多个抓取单元;
18.第一基准图像被配置成与第一监控图像的规格相同,且第一基准图像由若干个均匀排列的第一矩形框组成,将第一监控图像与第一基准图像进行嵌合,嵌合后进行二值化处理,二值化处理后通过第一识别单元获取每一第一矩形框的灰度值就可以获取第一监控图像中车辆数量以及对具有车辆存在的矩形框进行记录和位置识别,基于车辆数量换算得到单位时间的通行流量;
19.每一所述抓取单元用于从得到位置识别的矩形框中抓取车辆,并映射到第一监控图像中,以抓取多个参照样本;
20.第二处理核具有第二基准图像和第二识别单元;
21.第二基准图像被配置成与第二监控图像的规格相同,且第二基准图像由若干个均匀排列的第二矩形框组成,将第二监控图像与第二基准图像进行嵌合后,由所述第二识别单元加载参照样本并使得第二识别单元沿第二矩形框依次进行滑动识别,以在第二监控图像中识别出参照样本;同时基于第一监控图像和第二监控图像之间的时间间隔和第一监控摄像机与第二监控摄像机之间距离来换算参照样本的平均速度;
22.计算部,基于由第一处理核得到的第一监控图像中单位时间内的通行流量以及第二处理核得到的参照样本的平均速度来计算由第一监控摄像机到第二监控摄像机之间的交通拥挤状态。
23.进一步地,所述逻辑控制部具有:
24.逻辑判断单元,获取当前的信号灯的第一控制逻辑方案,并基于计算部得到的交通拥挤状态来获取适合所述交通拥挤状态的第二控制逻辑方案;
25.比较单元,用于将第一控制逻辑方案和第二控制逻辑方案进行比较;
26.执行单元,用于当第一控制逻辑方案和第二控制逻辑方案不同时,则按照第二控制逻辑方案来进行信号灯的控制。
27.进一步地,所述处理部还包括:
28.接收单元,用于基于时序接收第一监控图像和第二监控图像;
29.任务管理单元,连接所述接收单元,用于将接收到的第一监控图像和第二监控图像按照时序进行标定,标定后形成一个处理组合;且用于将处理组合按照时序依次输入至处理组合单元。
30.进一步地,多个所述处理组合单元形成一个m*n处理矩阵,其中m、n均为大于等于2的整数。
31.进一步地,第一识别单元获取每一第一矩形框的灰度值的方法如下:
32.设定第一基准图像为白衬底,第一矩形框由黑线条绘制,且在第一矩形框的中心设置有一基准线,所述基准线为黑线条;使得当进行二值化处理时,白衬底的灰度值为255,黑线条的灰度值为0;
33.将第一监控图像进行预处理,处理掉第一监控图像的底图,并将第一监控图像的底图设定成白色;
34.预处理后与第一基准图像进行嵌合,形成一张融合图像, 融合图像进行二值化处理;
35.检测每一矩形框内灰度值分布,若第一矩形框内灰度值的分布超过基准线时,将第一该矩形框进行记录和位置识别,说明此时第一矩形框内具有车辆存在;若第一矩形框内灰度值的分布超过基准线时,说明此时没有车辆存在。
36.本技术采用二值化处理方法来获取每一矩形框的灰度值分布来判断矩形框内是否具有车辆存在,相比于使用神经网络模型,二值化处理技术手段简单,同时为了满足快速处理的要求,本技术采用了以多个处理组合单元组合形成的处理矩阵来进行处理,处理组合单元的数量可以依据处理量来进行配置,比如一般满足满负荷处理需要32个处理组合单元就可以完成。
附图说明
37.以下附图仅对本发明作示意性的说明和解释,并不用于限定本发明的范围,其中:
38.图1为本发明中交通调度设备以双向交通无交汇路段进行布设的示意图;
39.图2为本发明中交通调度设备以双向交汇交通路段进行布设的示意图;
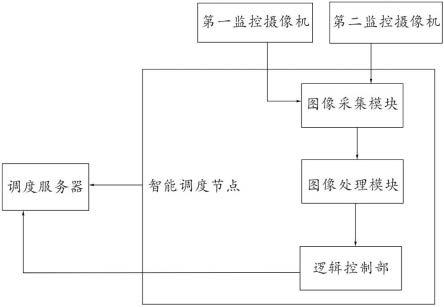
40.图3为本发明系统的结构示意图。
具体实施方式
41.为了使本发明的目的、技术方案、设计方法及优点更加清楚明了,以下结合附图通过具体实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。
42.实施例1:
43.参照图3,本发明提供了一种智能交通调度系统,包括:
44.设置多个智能调度节点,将每一智能调度节点部署在每一交通汇聚处,
45.每一所述智能调度节点被配置成:
46.图像采集模块,用于获取每一交通汇聚处每一通行线路上单位时间内的第一监测图像和第二监测图像;
47.图像处理模块,用于基于第一监测图像和第二监测图像二值化处理来来获取每一交通汇聚处每一通行线路的通行流量和通行速度;
48.逻辑控制部,用于基于每一交通汇聚处每一通行线路的通行流量和通行速度来综合判断当前的信号灯的第一控制逻辑方案是否满足当前的通行流量,如不满足,则由控制逻辑部根据判断结果对应的选择对应的第二控制逻辑方案对每一交通汇聚处每一通行线路的交通灯进行调控。
49.每一所述每一智能调度节点连接至调度服务器,所述智能调度节点基于物联网技术将每一智能调度节点的调度方案传递至调度服务器;可以通过将调度服务器接入至调度平台,可以实时的显示各个路况的具体情况。
50.在上述中,将交通汇聚点划分为汇聚区,以及与汇聚区对接的至少两条通行路线,沿每一通行路线的边侧至少设置有第一监控摄像机(对应第一图像采集模块)和第二监控摄像机(对应第二图像采集模块);将第二监控摄像机设置在汇聚区与通行路线的交汇处,将第一监控摄像机设置在第二监控摄像机的前端,且第一监控摄像机和第二监控摄像机之间的距离为100-500米;其中,设置第一监控摄像机和第二监控摄像机的广角范围,其中,第一监控摄像机用于获取通行路线设定区域的第一监控图像;第二监控摄像机用于获取汇聚区前部通行路线设定区域的第二监控图像;
51.在第一监控摄像机和第二监控摄像机处均设置有通信模块,通过通信模块与智能调度节点以及调度服务器进行通信。
52.参照图1-图2,在一些实施例中,图1给出了一种双向交通示意图,图2给出了一种十字路口交通示意图;在图1和图2中,汇聚区均为以斑马线为中心形成的区域,图1和图2中的箭头代表了通行方向;第一监控摄像机1和第二监控摄像机2的广角范围分别是区域一和区域二(其他摄像机均具有相同的区域),区域一和区域二的大小一致;这种设置的目的在于,使得第一监控摄像机1和第二监控摄像机2获取相同大小的图像。
53.一般地第一监控摄像机1和第二监控摄像机2的距离为100米,其中第一摄像机1用于获取区域一的第一监控图像,第二监控摄像机2用于获取区域二的第二监控图像。
54.在上述中,所述图像处理模块具有:
55.处理部,具有多个处理组合单元,基于时序将第一监控图像和第二监控图像作为一个处理组合输入至每一处理组合单元,且每一处理组合单元具有第一处理核和第二处理核;其中,图像处理模块采用p4080处理器作为基础框架,设置有至少两个e4690图形处理器,在e4690图形处理器的基础上来构建第一处理核或者第二处理核,也就是说,第一处理核或者第二处理核是在e4690图形处理器强大的图像处理能力的基础上构建的具备第一基准图像、第一识别单元和多个抓取单元的综合处理模块,其中,在e4690图形处理器中进行基础扩展,增加otsu二值化处理算法,具体地,通过在e4690图形处理器的外展串口下接入可编辑的stm32f103芯片,以stm32f103芯片作为二值化处理的核心,写入otsu二值化处理算法,并配备多个串口以便与其他硬件连接。
56.在上述中,e4690图形处理器用于将实时获取的第一监控图像和第二监控图像进行预处理,以得到符合设定要求的图像,去除虚化以及有明显性缺陷的图像;第一基准图像被配置成与第一监控图像的规格相同,且第一基准图像由若干个均匀排列的第一矩形框组成,将第一监控图像与第一基准图像进行嵌合,嵌合后输入至stm32f103芯片进行二值化处理,二值化处理后输入至e4690图形处理器,e4690图形处理器通过串口输入至第一识别单元,第一识别单元获取每一第一矩形框的灰度值就可以获取第一监控图像中车辆数量以及对具有车辆存在的矩形框进行记录和位置识别,具体的,第一识别单元获取每一第一矩形框的灰度值的方法如下:设定第一基准图像为白衬底,第一矩形框由黑线条绘制,且在第一矩形框的中心设置有一基准线,所述基准线为黑线条;使得当进行二值化处理时,白衬底的灰度值为255,黑线条的灰度值为0;将第一监控图像进行预处理,处理掉第一监控图像的底
图,并将第一监控图像的底图设定成白色;预处理后与第一基准图像进行嵌合,形成一张融合图像, 融合图像进行二值化处理;检测每一第一矩形框内灰度值分布,若第一矩形框内灰度值的分布超过基准线时,将该第一矩形框进行记录和位置识别,说明此时矩形框内具有车辆存在;若第一矩形框内灰度值的分布超过基准线时,说明此时没有车辆存在;通过统计记录的第一矩形框就可以得到车辆数量,基于车辆数量换算得到单位时间的通行流量;
57.每一所述抓取单元用于从得到位置识别的矩形框中抓取车辆,并映射到第一监控图像中,以抓取多个参照样本;
58.第二处理核具有第二基准图像和第二识别单元;
59.第二基准图像被配置成与第二监控图像的规格相同,且第二基准图像由若干个均匀排列的第二矩形框组成,将第二监控图像与第二基准图像进行嵌合后,由所述第二识别单元加载参照样本并使得第二识别单元沿第二矩形框依次进行滑动识别,以在第二监控图像中识别出参照样本;同时基于第一监控图像和第二监控图像之间的时间间隔和第一监控摄像机与第二监控摄像机之间距离来换算参照样本的平均速度;
60.计算部,基于由第一处理核得到的第一监控图像中单位时间内的通行流量以及第二处理核得到的参照样本的平均速度来计算由第一监控摄像机到第二监控摄像机之间的交通拥挤状态。
61.在上述中,去除第一监测图像底图的目的在于,减少由于马路颜色对二值化处理过程中的影响;其中,每一个第一矩形框的大小设定对照实际的5米长,大小与车的长度一样;宽以通行路线的指示线为准。
62.在一些实施例中,由于不同的颜色在二值化处理过程中的值不一致,但是汽车具有典型的特征,比如两侧轮胎、前后的玻璃等,在二值化处理后具有相似的特征,利用上述的颜色特征、以及轮胎、玻璃等特征可以识别出矩形框内是否存在车辆,且通过设定基准线,比如将基准线设置在矩形框中间,一般情况下,车的长度小于5米,如果一辆车刚好位于两个矩形框中,其中,分布值超过基准线则认为有车的存在,未超过则认为不存在,这样可以避免统计重复;也避免了统计错漏。
63.在一些实施例中,第一基准图像为白衬底,这样可以降低由于基准图像的色差导致的二值化处理结果不精确的问题。在实际中,图片中的白色车在进行二值化处理时,其值分布分180-220,并不会是255,可以与白衬底形成明显的区别,可以利用这个特征,实现对白色车的识别。
64.在上述中,所述逻辑控制部具有:
65.逻辑判断单元,获取当前的信号灯的第一控制逻辑方案,并基于计算部得到的交通拥挤状态来获取适合所述交通拥挤状态的第二控制逻辑方案;
66.比较单元,用于将第一控制逻辑方案和第二控制逻辑方案进行比较;
67.执行单元,用于当第一控制逻辑方案和第二控制逻辑方案不同时,则按照第二控制逻辑方案来进行信号灯的控制。
68.在上述中,所述处理部还包括:
69.接收单元,用于基于时序接收第一监控图像和第二监控图像;
70.任务管理单元,连接所述接收单元,用于将接收到的第一监控图像和第二监控图像按照时序进行标定,标定后形成一个处理组合;且用于将处理组合按照时序依次输入至
处理组合单元。
71.在上述中,多个所述处理组合单元形成一个m*n处理矩阵,其中m、n均为大于等于2的整数。
72.在上述中,逻辑控制部是以可编辑plc控制器为基础框架,常用的包括西门子s7-200、s7-1200、s7-300、s7-400型号,不管选择哪一个型号的可编辑plc控制器,其基础的配置包括一个控制cpu,指令至数据存储单元和出入和输出接口;基于可编辑plc控制器写入多个逻辑控制方案,然后存储在指令至数据存储单元,其中,逻辑控制方案为基于不同的交通拥挤状态而设定的控制方案,包括了根据控制方案来进行信号灯控制的控制指令。
73.在上述中,逻辑判断单元包含了对现有控制方案的判断,同时包含了交通拥挤状态的判断,通过交通拥挤状态的判断以确定当前设置的第一控制逻辑方案是否满足调度的需求,如果满足,执行第一控制逻辑方案,如果不满足则需要执行第二控制逻辑方案。
74.实施例2:
75.参照图1和图2,本技术提供了一种智能交通调度方法,包括如下步骤:
76.设置多个智能调度节点,将每一智能调度节点部署在每一交通汇聚处,
77.每一所述智能调度节点被配置成:
78.获取每一交通汇聚处每一通行线路上单位时间内的第一监测图像和第二监测图像;
79.基于第一监测图像和第二监测图像二值化处理来来获取每一交通汇聚处每一通行线路的通行流量和通行速度;
80.基于每一交通汇聚处每一通行线路的通行流量和通行速度来综合判断当前的信号灯的第一控制逻辑方案是否满足当前的通行流量,如不满足,则由控制逻辑部根据判断结果对应的选择对应的第二控制逻辑方案对每一交通汇聚处每一通行线路的交通灯进行调控。
81.其中,
82.第一处理核具有第一基准图像、第一识别单元和多个抓取单元;
83.第一基准图像被配置成与第一监控图像的规格相同,且第一基准图像由若干个均匀排列的第一矩形框组成,将第一监控图像与第一基准图像进行嵌合,嵌合后进行二值化处理,二值化处理后通过第一识别单元获取每一第一矩形框的灰度值就可以获取第一监控图像中车辆数量以及对具有车辆存在的矩形框进行记录和位置识别,具体的,第一识别单元获取每一第一矩形框的灰度值的方法如下:设定第一基准图像为白衬底,第一矩形框由黑线条绘制,且在第一矩形框的中心设置有一基准线,所述基准线为黑线条;使得当进行二值化处理时,白衬底的灰度值为255,黑线条的灰度值为0;将第一监控图像进行预处理,处理掉第一监控图像的底图,并将第一监控图像的底图设定成白色;预处理后与第一基准图像进行嵌合,形成一张融合图像, 融合图像进行二值化处理;检测每一第一矩形框内灰度值分布,若第一矩形框内灰度值的分布超过基准线时,将该第一矩形框进行记录和位置识别,说明此时矩形框内具有车辆存在;若第一矩形框内灰度值的分布超过基准线时,说明此时没有车辆存在;通过统计记录的第一矩形框就可以得到车辆数量,基于车辆数量换算得到单位时间的通行流量;
84.每一所述抓取单元用于从得到位置识别的矩形框中抓取车辆,并映射到第一监控
图像中,以抓取多个参照样本;
85.第二处理核具有第二基准图像和第二识别单元;
86.第二基准图像被配置成与第二监控图像的规格相同,且第二基准图像由若干个均匀排列的第二矩形框组成,将第二监控图像与第二基准图像进行嵌合后,由所述第二识别单元加载参照样本并使得第二识别单元沿第二矩形框依次进行滑动识别,以在第二监控图像中识别出参照样本;同时基于第一监控图像和第二监控图像之间的时间间隔和第一监控摄像机与第二监控摄像机之间距离来换算参照样本的平均速度;
87.本技术采用二值化处理方法来获取每一矩形框的灰度值分布来判断矩形框内是否具有车辆存在,相比于使用神经网络模型,二值化处理技术手段简单,同时为了满足快速处理的要求,本技术采用了以多个处理组合单元组合形成的处理矩阵来进行处理,处理组合单元的数量可以依据处理量来进行配置,比如一般满足满负荷处理需要32个处理组合单元就可以完成。
88.以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
