1.本发明涉及水下光学测量领域,特别涉及一种基于光学视觉的水下目标尺寸测量装置和方法。
背景技术:
2.水下目标物尺寸测量对于海洋管道巡检、深海工程作业、湖泊大坝检测等应用至关重要,由于无线电波在水中衰减严重,传统的电磁检测方法不能适应水下环境。目前,常用的水下目标物尺寸测量主要依靠声学方法和光学方法。其中声学测量是通过声波对水中的目标尺寸进行测量,具有作用距离远的优势;然而受声波波长较大的限制,这种方法在测量精度方面存在局限性。相对的,光学方法具有精度高的优点,近年来引起了广泛的重视。
3.基于光学的水下目标尺寸测量方法主要包括飞行时间(time of flight,tof)测量、水下双目、水下激光扫描成像、水下主动激光点阵投影成像等。tof方法是通过测量激光发射和回波探测的时间差得到距离信息,进而通过扫描形成点云,测量目标物的大小;但是这种方法容易受到海水后向散射的影响,因此限制了该技术的应用范围。
4.水下双目测量是通过立体视觉的方法建立目标的三维立体结构,进而得到目标的尺寸信息,可参考“张洪龙,陈涛,庄培钦等,《基于立体视觉的水下三维测量系统研究》”,这种方法的不足是测量效果受到水体浑浊度和照度的影响较大,测量距离和稳定性受限。
5.水下激光扫描成像是通过相机拍摄线激光在目标物表面的影响,然后通过三角测量的方法获取目标物表面三维信息;这种方法的不足是作用距离一般较近,受水质影响较大,可参考“谢晓梦,《水下目标激光扫描深度探测精度分析》”。
6.水下激光点阵投影成像测量系统主要由相互平行的阵列激光和相机构成,工作时阵列激光向水中投射激光点组成的点阵,通过相机对点阵特征进行提取,进而获取目标物的距离和尺寸信息,见“杨梦宁,韩彪,张兵等,《一种水下测量的设备与水下测量方法》”;该种方法有助于实现远距离目标的尺寸测量,但是能够测量的目标物尺寸大小受到相机视场的限制。
技术实现要素:
7.针对现有技术存在的上述问题,本发明要解决的第一个技术问题是:提供一种对水下目标物进行测量的装置。
8.要解决的第二个技术问题是:针对水下目标物提供一种测量准确性高且适用范围广的测量方法。
9.为解决上述第一个技术问题,本发明采用如下技术方案:一种基于光学视觉的水下目标尺寸测量的装置,包括水下相机、j个水下激光器、转台和数据处理模块,其中j≥2;
10.所述j个水下激光器用于在水下目标物表面形成光斑阵列,且所述j个水下激光器发射的j个光束之间相互平行,且水下激光器的光束指向和水下相机光轴平行;
11.所述水下相机用于拍摄光束在水下目标物表面形成的光斑图案;
12.所述转台用于支撑水下相机和j个水下激光器;
13.所述数据处理模块用于对水下相机拍摄到光斑图案进行识别,通过“近大远小”的成像原理,从中获取水下相机与水下目标物之间的距离信息,并结合转台的旋转角,计算水下目标物的尺寸信息。
14.作为优选,所述数据处理模块包括区域分割模块和测量计算模块,所述区域分割模块和测量计算模块为依次连接;
15.所述区域分割模块为mask r-cnn分割算法模型,所述测量计算模块利用区域分割模块得到的区域信息计算水下目标物的尺寸。
16.为解决上述第二个技术问题,本发明采用如下技术方案:一种基于光学视觉的水下目标尺寸测量的方法,其特征在于:采用权利要求1所述的基于光学视觉的水下目标尺寸测量的装置,所述测量方法包括如下步骤:
17.s1:设d为光斑图像与水下相机之间的距离,l为光斑图案周长,建立d与l之间的映射关系,表达式如下:
18.d=a
×
lb c;(1)
19.其中,a、b和c表示常数;
20.s2:所述转台从水下目标物的起始位置d1转到水下目标物的末端位置d2,记录转台的旋转角度α;同时,水下相机拍摄d1和d2处水下目标物表面的光斑图像;
21.s3:采用数据处理模块对d1对应的光斑图像进行处理,得到光斑图像周长l1;采用数据处理模块对d2对应的光斑图像进行处理,得到光斑图像周长l2;
22.s4:将l1和l2代入公式(1)进行计算,分别得到d1和d2;
23.s5:计算水下目标物的实际尺寸m,具体表达式如下:
[0024][0025]
其中,α表示转台旋转的角度。
[0026]
作为优选,所述s1中建立d与l之间的映射关系的具体步骤如下:
[0027]
s11:获取w个带有距离标签的光斑图像;
[0028]
s12:将所述光斑图像作为数据处理模块的输入,获取多个光斑的像素坐标,利用像素坐标计算该光斑图像周长l,l的具体表达式如下:
[0029][0030]
其中,(xr,yr)表示光斑的像素坐标,r表示光斑的数量;
[0031]
s13:将所有带有距离标签d的光斑图像周长l组成数据集,且d与l一一对应;
[0032]
s14:采用最小二乘法将数据集中的d和l进行拟合,得到d与l之间的函数映射关系。
[0033]
作为优选,所述s12中获取多个光斑的像素坐标,计算该光斑图像周长l的具体步骤如下:
[0034]
s121:将s11中获取的w个光斑图像作为训练集;
[0035]
s122:分别对w个光斑图像进行几何图形标注,得到w个带有图形标注标签的光斑
图像,每个带有图形标注标签的光斑图像为一个训练样本;
[0036]
s123:令t=1;
[0037]
s124:从w中选择第t个训练样本作为mask r-cnn神经网络模型的输入,输出得到第t个训练样本对应的mask掩码分割图像t’;
[0038]
s125:对t’进行轮廓拟合与边缘检测处理,得到第t个训练样本的预测图像t”;
[0039]
s126:设置损失阈值,计算t”与t之间的损失loss;
[0040]
当loss值小于损失阈值时,得到训练好的mask r-cnn神经网络模型,并执行下一步;否则,反向传播更新mask r-cnn神经网络模型中的参数,并令t=t 1,且返回s124;
[0041]
s127:将待预测光斑图像进行几何图形标注,并作为训练好的mask r-cnn神经网络模型的输入,输出得到围成该待预测光斑图像的光斑像素坐标;
[0042]
s128:利用s127得到的光斑像素坐标计算该待预测光斑图像的周长l。
[0043]
相对于现有技术,本发明至少具有如下优点:
[0044]
1.利用现有的mask r-cnn神经网络对水下目标物上的光斑区域进行精确的划分,这样可以明确区域范围,并且有准确的像素点坐标;然后通过像素点坐标得到光斑图像的周长,利用水下相机到水下目标物之间的距离d与光斑图像周长l之间的映射关系,可以得到光束点在准确的起始位置d1与结束位置d2,最后利用d1和d2来计算水下目标的尺寸,这样的测量过程更能适应不同的水质环境,也使测量结果更加准确。
[0045]
2.利用转台搭载相机和激光器,使其能够旋转,结合三角测量的方法能够提升目标尺寸的监测范围,更加适应水下大尺寸目标的测量。
[0046]
3.采用深度学习检测光斑的位置信息,能够有效抑制水体后向散射对光斑检测的影响,有助于提升光斑位置的检测精度。
附图说明
[0047]
图1本发明水下测量装置示意图。
[0048]
图2本发明水下测量方法示意图。
[0049]
图3本发明实施例中测量系统示意图。
[0050]
图4本发明实施例中所采取的水下距离测量装置示意图。
[0051]
图5本发明实施例中水下相机和4个水下激光器组成的测试设备。
[0052]
图6本发明实施例中水下光斑的识别。
[0053]
图7本发明实施例中测试点a的距离。
[0054]
图8本发明实施例中测试点b的距离。
具体实施方式
[0055]
下面对本发明作进一步详细说明。
[0056]
参见图1-图2,一种基于光学视觉的水下目标尺寸测量的装置,包括水下相机、j个水下激光器、转台和数据处理模块,其中j≥2;
[0057]
所述j个水下激光器用于在水下目标物表面形成光斑阵列,且所述j个水下激光器发射的j个光束之间相互平行,且水下激光器的光束指向和水下相机光轴平行;
[0058]
所述水下相机用于拍摄光束在水下目标物表面形成的光斑图案;
[0059]
所述转台用于支撑水下相机和j个水下激光器,其目的是为了使得j个水下激光器和水下相机能够作为一个整体发生旋转;
[0060]
所述数据处理模块用于对水下相机拍摄到光斑图案进行识别,通过“近大远小”的成像原理,从中获取水下相机与水下目标物之间的距离信息,并结合转台的旋转角,计算水下目标物的尺寸信息。
[0061]
所述数据处理模块包括区域分割模块和测量计算模块,所述区域分割模块和测量计算模块为依次连接;所述数据处理模块,用于对水下相机拍摄到的激光光斑阵列图像进行分析计算,主要就是通过“近大远小”的成像原理,从中获取相机与目标之间的距离信息,并结合转台的旋转角,计算目标物的尺寸信息;
[0062]
所述区域分割模块为mask r-cnn分割算法模型,所述mask r-cnn分割算法模型为现有技术,所述测量计算模块利用区域分割模块得到的区域信息计算水下目标物的尺寸。
[0063]
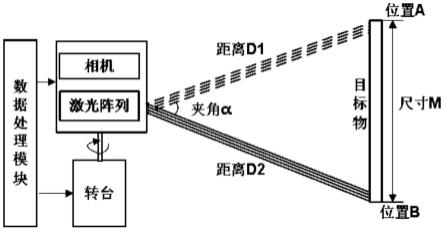
具体实施时,参见图3,为本项目实施例测量系统主要有四个激光器阵列、相机、转台、电脑、测试点a和测试点b组成。其中,四个激光器和相机放置在一个水密壳体内,如图4所示;激光器出射方向和相机光轴相互平行,当激光照射到目标物表面时,能够从相机中观察到激光光点。转台放置在水中,能够按照指令旋转一定的角度,用来使激光器阵列和相机组成的装置在水中整体转动。电脑和转台、激光器和相机构成的装备之间通过水密缆线连接,用来读取转台旋转的角度和相机中获取的激光光点图片,并计算出目标物的尺寸信息。测试点a和测试点b分别用来模拟待测目标物的起始位置和末端位置。
[0064]
如图5所示,将水下相机、水下激光器及对应的安装支架放入水中进行标定,以0.05m为间距,采集1.5m~11m处的光斑图像;这些管板图像组成数据集;
[0065]
s1:设d为光斑图像与水下相机之间的距离,l为光斑图案周长,建立d与l之间的映射关系,表达式如下:
[0066]
d=a
×
lb c;(1)
[0067]
其中,a、b和c表示常数;
[0068]
所述s1中建立d与l之间的映射关系的具体步骤如下:
[0069]
s11:获取w个带有距离标签的光斑图像;
[0070]
s12:将所述光斑图像作为数据处理模块的输入,获取多个光斑的像素坐标,利用像素坐标计算该光斑图像周长l,l的具体表达式如下:
[0071][0072]
其中,(xr,yr)表示光斑的像素坐标,r表示光斑的数量;
[0073]
s121:将s11中获取的w个光斑图像作为训练集;
[0074]
s122:分别对w个光斑图像进行几何图形标注,得到w个带有图形标注标签的光斑图像,每个带有图形标注标签的光斑图像为一个训练样本;
[0075]
s123:令t=1;
[0076]
s124:从w中选择第t个训练样本作为mask r-cnn神经网络模型的输入,输出得到第t个训练样本对应的mask掩码分割图像t’;
[0077]
s125:对t’进行轮廓拟合与边缘检测处理,轮廓拟合与边缘检测均为现有技术,得
到第t个训练样本的预测图像t”;
[0078]
s126:设置损失阈值,计算t”与t之间的损失loss;
[0079]
当loss值小于损失阈值时,得到训练好的mask r-cnn神经网络模型,并执行下一步;否则,反向传播更新mask r-cnn神经网络模型中的参数,并令t=t 1,且返回s124;
[0080]
s127:将待预测光斑图像进行几何图形标注,并作为训练好的mask r-cnn神经网络模型的输入,输出得到围成该待预测光斑图像的光斑像素坐标;
[0081]
s128:利用s127得到的光斑像素坐标计算该待预测光斑图像的周长l。
[0082]
s13:将所有带有距离标签d的光斑图像周长l组成数据集,且d与l一一对应;
[0083]
s14:采用最小二乘法将数据集中的d和l进行拟合,得到d与l之间的函数映射关系,最小二乘法为现有技术;
[0084]
s2:所述转台从水下目标物的起始位置d1转到水下目标物的末端位置d2,记录转台的旋转角度α;同时,水下相机拍摄d1和d2处水下目标物表面的光斑图像;
[0085]
s3:采用数据处理模块对d1对应的光斑图像进行处理,得到光斑图像周长l1;采用数据处理模块对d2对应的光斑图像进行处理,得到光斑图像周长l2;
[0086]
s4:将l1和l2代入公式(1)进行计算,分别得到d1和d2;
[0087]
s5:计算水下目标物的实际尺寸m,具体表达式如下:
[0088][0089]
其中,α表示转台旋转的角度。
[0090]
具体实施时,如图6所示,通过mask r-cnn深度学习算法训练模型的权重,用于精确识别和分割光斑区域,并拟合相机中光斑中心组成的图像周长和距离之间的关系,如公式(4)。其中l是所测光斑区域的周长,单位为pixel;d是目标平面与相机之间的预测距离,单位为cm
[0091]
d=99556.57l-0.9753 (4)
[0092]
最后,如图3所示,在水中搭建测试系统,以测试点a和测试点b分别模拟待测目标的起始位置和末端位置,二者间距约为490cm,即测试点a和测试点b所模拟的目标尺寸约为490cm。转台从测试点a旋转到测试点b的角度为45
°
,如图7所示,测试得到相机与测试点a的距离为168.91cm,测试点b的距离为591.54cm。计算得到测试点a和测试点b之间模拟目标尺寸为486.98cm。目标物测量的相对误差约为0.62%。这验证了方法的可行性。
[0093]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。