1.本发明属于铝电解智能装备技术领域,具体涉及一种基于激光线轮廓仪阵列扫描的铝电解槽筑炉结果检测方法。
背景技术:
2.铝电解槽整体内衬筑炉工艺是一种新型内衬筑炉工艺,在现有技术中,公开号为cn111487196a的发明专利公开了一种铝电解槽整体内衬筑炉3d检测装置及方法,该装置包括固定架,所述固定架架在电解槽的正上方;在该固定架的两根主梁上的轨道上设有移动架,在移动架的两根主梁上的轨道上设有移动装置,所述移动架和所述移动装置均具有自动定位系统;所述移动装置上装有3d相机和筑炉装置;所述3d相机和所述筑炉装置在所述移动架和所述移动装置的带动下可以实现x、y方向上的任意移动。该方案可以实时高效地监测筑炉质量,指导筑炉作业,填补行业空白。
3.现使用铝电解槽内衬筑炉机器人进行铝电解槽内衬筑炉,由系统控制的筑炉机器人逐层、逐行进行内衬材料的直接布料、捣固,从底层向上层依次开展作业。每层料、每行料的作业完成后,系统都需要对该层料、该行料的作业结果进行监测和反馈,包括对布料高度、捣固后的三维外形进行监测,并将其与工艺卡中规定的所需三维外形之差异反馈给控制系统,以进行结果的分析,并开展后续的布料、捣固作业。因为逐行振打会对刚振打过的材料有一些挤压影响,采用线轮廓仪跟随逐行扫描的方式在点云拼接过程中难度较大。如何解决这个问题,是本领域技术人员的一项重要工作。
技术实现要素:
4.本发明的目的是为克服现有技术的不足,提供基于激光线轮廓仪阵列扫描的铝电解槽筑炉结果检测方法。
5.本发明是这样实现的:
6.一种基于激光线轮廓仪阵列扫描的铝电解槽筑炉结果检测方法,包括如下步骤:首先是铝用筑炉机器人的布料装置按照预定的方案进行布料,沿铝电解槽x轴方向按行前进,并通过一个编码器计算旋转臂前进的距离,沿铝电解槽y轴方向垂直进行按行布料,并通过另外一个编码器计算y轴移动的距离;然后铝筑炉机器人的振打装置按照预定方案沿电解槽y轴方向按行进行振打布好的材料;铝筑炉机器人布料并振打好一层料之后,线轮廓仪阵列沿电解槽x轴反方向扫描刚才振打的材料,并将扫描结果通过通信线传回三维外形检测工控机,三维外形监测系统通过编码器计算的距离、已振打平面的厚度,实时拼接多个线轮廓仪扫描的点云线,并实现与前面已扫描好的点云拼接;线轮廓仪阵列扫描结束形成该层的点云,根据点云判断振打平面是否满足要求;铝用筑炉机器人根据检测结果智能调整其方案,指导下一步的智能作业。
7.进一步的,线轮廓仪阵列采用tcp通信协议同步驱动,并对固定机械臂上的安装位置进行精确测量。
8.进一步的,所述线轮廓仪阵列由四台线轮廓扫描仪装置构成,包括线轮廓扫描仪装置一,线轮廓扫描仪装置二,线轮廓扫描仪装置三,线轮廓扫描仪装置四。
9.与现有技术相比,本发明的基于激光线轮廓仪阵列扫描的铝电解槽筑炉结果检测方法针对筑炉机器人筑炉施工时在应用新型碳/碳复合材料对铝电解槽进行内衬砌筑的过程中,对每层布料和振打结果的三维外形进行监测,并将结果与预设工艺结果的三维外形差反馈给控制系统,从而指导布料与振打作业。本发明将3d扫描系统的结果拼接成一张完整的点云图形,其材料研究人员也可以及时了解和分析材料捣固的效果,分层、行的外形监测结果合并后可以形成材料捣固结果的整体三维模型,这些都可以为后续的材料工艺技术改进提供依据。
附图说明
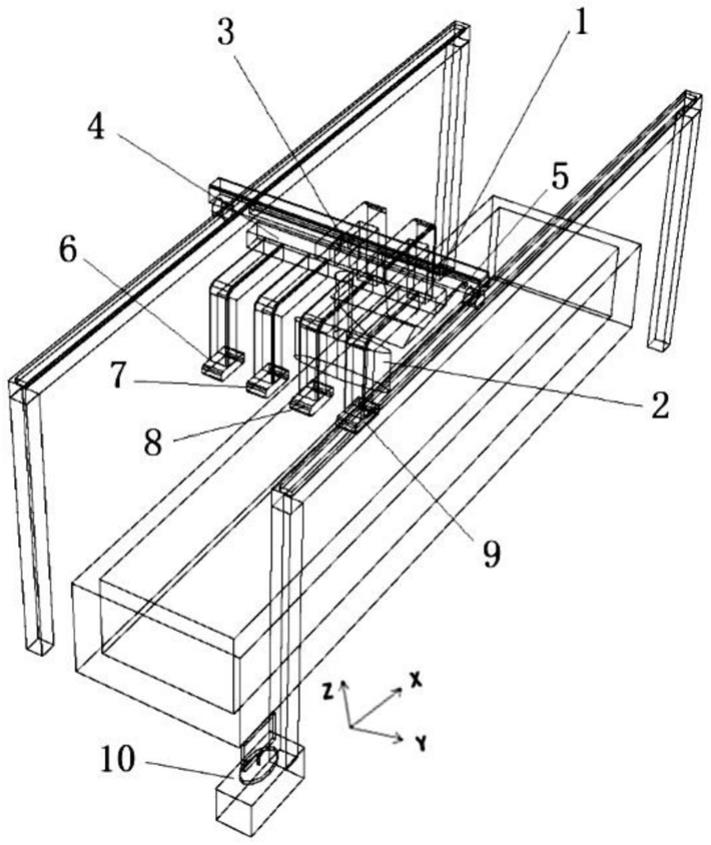
10.图1是本发明的整体示意图。
11.附图中的标记为:1
‑
布料装置,2
‑
振打装置,3
‑
旋转臂,4
‑
固定机械臂,5
‑
编码器,6
‑
线轮廓扫描仪装置一,7
‑
线轮廓扫描仪装置二,8
‑
线轮廓扫描仪装置三,9
‑
线轮廓扫描仪装置四,10
‑
三维外形检测工控机。
具体实施方式
12.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
13.如图1所示,本发明的整体系统包括如下装置部件:铝用筑炉机器人的布料装置1,铝用筑炉机器人的振打装置2,同时移动布料装置1、振打装置2的旋转臂3,安装线轮廓仪阵列的固定机械臂4,计算固定机械臂4沿铝电解槽x轴方向移动的编码器5,线轮廓扫描仪装置一6,线轮廓扫描仪装置二7,线轮廓扫描仪装置三8,线轮廓扫描仪装置四9,三维外形检测工控机10(线轮廓仪阵列实时扫描结果通过通信线传回工控机进行处理)。
14.首先是铝用筑炉机器人的布料装置1按照预定的方案进行布料,沿铝电解槽x轴方向按行前进,并通过一个编码器5计算旋转臂3前进的距离,沿铝电解槽y轴方向垂直进行按行布料,并通过另外一个编码器5计算y轴移动的距离;
15.然后铝筑炉机器人的振打装置2按照预定方案沿电解槽y轴方向按行进行振打布好的材料;
16.铝筑炉机器人布料并振打好一层料之后,线轮廓仪阵列沿电解槽x轴反方向扫描刚才振打的材料,并将扫描结果通过通信线传回三维外形检测工控机10,三维外形监测系统通过编码器计算的距离、已振打平面的厚度,实时拼接多个线轮廓仪扫描的点云线,并实现与前面已扫描好的点云拼接;
17.线轮廓仪阵列扫描结束形成该层的点云,根据点云判断振打平面是否满足要求。铝用筑炉机器人会根据检测结果智能调整其方案,指导下一步的智能作业。
18.如果振打的平面不满足要求,有以下几种处理方式:
19.1)在下一层根据线轮廓仪扫描拼接的振打平面点云计算出该层不同位置需要布料的材料量,以及不同位置不同行不同范围需要振打的时间与力度;
20.2)如果是最后一层,振打平面不满足预估目标,需要后退到指定位置,在指定位置
按指定量进行布料,布料结束之后,振打装置2在指定位置与指定范围重新进行振打。
21.线轮廓仪的扫描视野与扫描目标的距离有关,在量程范围内,距离越近,视野越窄,距离越远,视野越宽。因此,线轮廓仪阵列中线轮廓仪的数量由铝电解槽的宽度、线轮廓仪的量程、线轮廓仪的视野决定。
22.线轮廓仪阵列采用tcp通信协议同步驱动,并对固定机械臂4上的安装位置进行精确测量,误差在0.1mm,保证点云拼接的精度。
23.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种基于激光线轮廓仪阵列扫描的铝电解槽筑炉结果检测方法,其特征在于包括如下步骤:首先是铝用筑炉机器人的布料装置(1)按照预定的方案进行布料,沿铝电解槽x轴方向按行前进,并通过一个编码器(5)计算旋转臂(3)前进的距离,沿铝电解槽y轴方向垂直进行按行布料,并通过另外一个编码器(5)计算y轴移动的距离;然后铝筑炉机器人的振打装置(2)按照预定方案沿电解槽y轴方向按行进行振打布好的材料;铝筑炉机器人布料并振打好一层料之后,线轮廓仪阵列沿电解槽x轴反方向扫描刚才振打的材料,并将扫描结果通过通信线传回三维外形检测工控机(10),三维外形监测系统通过编码器(5)计算的距离、已振打平面的厚度,实时拼接多个线轮廓仪扫描的点云线,并实现与前面已扫描好的点云拼接;线轮廓仪阵列扫描结束形成该层的点云,根据点云判断振打平面是否满足要求;铝用筑炉机器人根据检测结果智能调整其方案,指导下一步的智能作业。2.根据权利要求1所述的基于激光线轮廓仪阵列扫描的铝电解槽筑炉结果检测方法,其特征在于:线轮廓仪阵列采用tcp通信协议同步驱动,并对固定机械臂(4)上的安装位置进行精确测量。3.根据权利要求1所述的基于激光线轮廓仪阵列扫描的铝电解槽筑炉结果检测方法,其特征在于:所述线轮廓仪阵列由四台线轮廓扫描仪装置构成,包括线轮廓扫描仪装置一(6),线轮廓扫描仪装置二(7),线轮廓扫描仪装置三(8),线轮廓扫描仪装置四(9)。
技术总结
本发明公开了一种基于激光线轮廓仪阵列扫描的铝电解槽筑炉结果检测方法,首先是铝用筑炉机器人的布料装置进行布料,沿铝电解槽X轴方向按行前进,并通过编码器计算旋转臂前进的距离,沿铝电解槽Y轴方向垂直进行按行布料,并通过另外一个编码器计算Y轴移动的距离;然后铝筑炉机器人的振打装置沿电解槽Y轴方向按行进行振打;布料并振打好一层料之后,线轮廓仪阵列沿电解槽X轴反方向扫描刚才振打的材料,并将扫描结果通过通信线传回三维外形检测工控机,三维外形监测系统通过编码器计算并拼接多个线轮廓仪扫描的点云线,实现与已扫描好的点云拼接;扫描结束形成该层的点云。本发明根据检测结果智能调整其方案,指导下一步的智能作业。能作业。
技术研发人员:吴中鼎 柴婉秋 马靓 张嘉 王先兵 何涛 黄涛 张华
受保护的技术使用者:中铝国际工程股份有限公司
技术研发日:2021.07.28
技术公布日:2021/12/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。