1.本发明涉及人机交互技术领域,具体为基于手指姿态估计的智能型人机交互装置。
背景技术:
2.人机交互装置是指通过计算机输入、输出设备,以有效的方式实现人与计算机对话的技术,人机交互装置包括机器通过输出或显示设备给人提供大量有关信息及提示请示等,人通过手指按压或者转动输入设备给机器输入有关信息,回答问题及提示请示等,人机交互装置是计算机用户界面设计中的重要内容之一。
3.但是,传统的人机交互装置存在以下缺点:
4.(1)传统的人机交互装置只能通过操控按钮、开关等固定的操控元件,无法适应装置变化的需要;
5.(2)传统的人机交互装置一般通过带有的触点与设备进行交互,但是其触点的位置固定,无法根据需求进行灵活变更,降低人机交互装置使用的灵活度。
技术实现要素:
6.本发明的目的在于提供基于手指姿态估计的智能型人机交互装置,以解决上述背景技术中提出的传统的人机交互装置只能通过操控按钮、开关等固定的操控元件,无法适应装置变化的需要;传统的人机交互装置一般通过带有的触点与设备进行交互,但是其触点的位置固定,无法根据需求进行灵活变更,降低人机交互装置使用的灵活度的问题。
7.为实现上述目的,本发明提供如下技术方案:基于手指姿态估计的智能型人机交互装置,包括人机交互壳,所述人机交互壳一侧的两端均固定安装有定位板,两个所述定位板之间的顶端转动连接有丝杆,两个所述定位板之间的底端固定安装有滑行杆,所述丝杆的中部螺纹连接有与滑行杆滑动连接的滑行块,所述滑行块的一侧固定安装有升降机构,所述升降机构包括连接台和交互台,所述交互台的顶端固定安装有交互机构,所述交互机构包括红外光学动作捕捉设备和指纹仪,所述人机交互壳的内部固定安装有控制中心和姿态预测模块,姿态预测模块利用手指指纹图像作为输入,利用手指姿态角作为label,训练深度学习预测模型,最终通过控制中心对进程控制。
8.优选的,所述红外光学动作捕捉设备的底端和指纹仪的底端均与交互台固定连接,指纹仪采集使用者的手指指纹,同时利用红外光学动作捕捉设备,采集使用者手指的姿态。
9.优选的,所述连接台底端的两侧均固定安装有安装板,两个所述安装板之间转动连接有旋转轴,所述旋转轴上固定安装有两个位于安装板一侧的主动伞状斜齿,所述连接台上转动连接有两个位于安装板一侧的从动伞状斜齿,所述连接台顶端的两侧均滑动连接有升降杆,两个所述升降杆的顶端分别与交互台底端的两侧固定连接,两个所述从动伞状斜齿的中部均固定安装有螺纹柱,且两个所述螺纹柱的中部均与交互台的中部螺纹连接,
两个所述主动伞状斜齿的外侧分别与两个从动伞状斜齿的外侧啮合连接,其中一个所述安装板的表面固定安装有旋转电机,所述旋转电机的输出端穿过正对安装板与旋转轴相邻的一端固定连接,旋转电机通电后启动,旋转电机带动旋转轴转动,旋转轴带动主动伞状斜齿转动,主动伞状斜齿转动时与从动伞状斜齿接触,从动伞状斜齿受到摩擦力转动,从动伞状斜齿带动螺纹柱进行同步运动,螺纹柱表面的螺纹与交互台内壁的螺纹相互匹配,交互台受到升降杆的限位,所以交互台随着升降杆沿着连接台发生滑动,以此对交互机构的纵向位置进行调整。
10.优选的,所述连接台的一侧与滑行块固定连接,升降机构通过连接台安装在滑行块上。
11.优选的,所述人机交互壳底端的四个边角均固定安装有移动轮,所述人机交互壳的顶端固定安装有防水顶板,所述人机交互壳的表面固定安装有连接接头,使用者通过连接接头将人机交互壳与外接设备相连,防水顶板由聚四氟乙烯材料制成,防水顶板从人机交互壳的顶部进行防水保护。
12.优选的,所述人机交互壳上固定安装有位于定位板一侧的伺服电机,所述伺服电机的输出端穿过定位板与丝杆正对的一端固定连接,伺服电机通电后启动,伺服电机带动丝杆转动,丝杆表面的螺纹与滑行块内壁的螺纹相互匹配,滑行块受到滑行杆的限位,所以滑行块沿着丝杆发生滑动,对交互机构的横向位置进行调节。
13.与现有技术相比,本发明的有益效果是:
14.1、通过设置交互机构,指纹仪采集使用者的手指指纹,同时利用红外光学动作捕捉设备,采集使用者手指的姿态,以此读取更多维度的信息,从而大幅提升虚拟或现实世界人机交互的自由度;
15.2、通过设置丝杆、滑行块和升降机构,滑行块沿着转动的丝杆发生滑动,对交互机构的横向位置进行调节,交互台在转动螺纹柱的作用下随着升降杆沿着连接台发生滑动,对交互机构的纵向位置进行调节,提高人机交互装置使用的灵活度。
附图说明
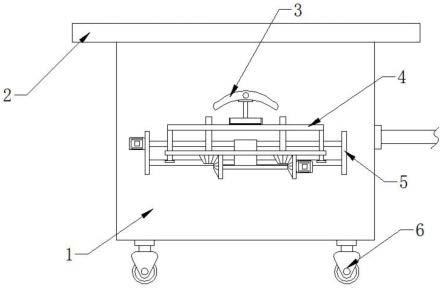
16.图1为本发明的侧视图;
17.图2为本发明的结构示意图;
18.图3为本发明交互机构与升降机构的连接图;
19.图4为本发明定位板与丝杆的连接图。
20.图中:1、人机交互壳;2、防水顶板;3、交互机构;31、红外光学动作捕捉设备;32、指纹仪;4、升降机构;41、升降杆;42、连接台;43、从动伞状斜齿;44、安装板;45、旋转轴;46、主动伞状斜齿;47、旋转电机;48、螺纹柱;49、交互台;5、定位板;6、移动轮;7、控制中心;8、姿态预测模块;9、连接接头;10、伺服电机;11、丝杆;12、滑行杆;13、滑行块。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
22.请参阅图1-4,本发明提供了基于手指姿态估计的智能型人机交互装置,包括人机
交互壳1,人机交互壳1一侧的两端均固定安装有定位板5,两个定位板5之间的顶端转动连接有丝杆11,两个定位板5之间的底端固定安装有滑行杆12,丝杆11的中部螺纹连接有与滑行杆12滑动连接的滑行块13,滑行块13的一侧固定安装有升降机构4,升降机构4包括连接台42和交互台49,交互台49的顶端固定安装有交互机构3,交互机构3包括红外光学动作捕捉设备31和指纹仪32,人机交互壳1的内部固定安装有控制中心7和姿态预测模块8,姿态预测模块8利用手指指纹图像作为输入,利用手指姿态角作为label,训练深度学习预测模型,最终通过控制中心7对进程控制。
23.红外光学动作捕捉设备31的底端和指纹仪32的底端均与交互台49固定连接,指纹仪32采集使用者的手指指纹,同时利用红外光学动作捕捉设备31,采集使用者手指的姿态。
24.连接台42底端的两侧均固定安装有安装板44,两个安装板44之间转动连接有旋转轴45,旋转轴45上固定安装有两个位于安装板44一侧的主动伞状斜齿46,连接台42上转动连接有两个位于安装板44一侧的从动伞状斜齿43,连接台42顶端的两侧均滑动连接有升降杆41,两个升降杆41的顶端分别与交互台49底端的两侧固定连接,两个从动伞状斜齿43的中部均固定安装有螺纹柱48,且两个螺纹柱48的中部均与交互台49的中部螺纹连接,两个主动伞状斜齿46的外侧分别与两个从动伞状斜齿43的外侧啮合连接,其中一个安装板44的表面固定安装有旋转电机47,旋转电机47的输出端穿过正对安装板44与旋转轴45相邻的一端固定连接,旋转电机47通电后启动,旋转电机47带动旋转轴45转动,旋转轴45带动主动伞状斜齿46转动,主动伞状斜齿46转动时与从动伞状斜齿43接触,从动伞状斜齿43受到摩擦力转动,从动伞状斜齿43带动螺纹柱48进行同步运动,螺纹柱48表面的螺纹与交互台49内壁的螺纹相互匹配,交互台49受到升降杆41的限位,所以交互台49随着升降杆41沿着连接台42发生滑动,以此对交互机构3的纵向位置进行调整。
25.连接台42的一侧与滑行块13固定连接,升降机构4通过连接台42安装在滑行块13上。
26.人机交互壳1底端的四个边角均固定安装有移动轮6,人机交互壳1的顶端固定安装有防水顶板2,人机交互壳1的表面固定安装有连接接头9,使用者通过连接接头9将人机交互壳1与外接设备相连,防水顶板2由聚四氟乙烯材料制成,防水顶板2从人机交互壳1的顶部进行防水保护。
27.人机交互壳1上固定安装有位于定位板5一侧的伺服电机10,伺服电机10的输出端穿过定位板5与丝杆11正对的一端固定连接,伺服电机10通电后启动,伺服电机10带动丝杆11转动,丝杆11表面的螺纹与滑行块13内壁的螺纹相互匹配,滑行块13受到滑行杆12的限位,所以滑行块13沿着丝杆11发生滑动,对交互机构3的横向位置进行调节。
28.本技术实施例在使用时:使用者使用人机交互装置前,伺服电机10通电后启动,伺服电机10带动丝杆11转动,丝杆11表面的螺纹与滑行块13内壁的螺纹相互匹配,滑行块13受到滑行杆12的限位,所以滑行块13沿着丝杆11发生滑动,对交互机构3的横向位置进行调节,旋转电机47通电后启动,旋转电机47带动旋转轴45转动,旋转轴45带动主动伞状斜齿46转动,主动伞状斜齿46转动时与从动伞状斜齿43接触,从动伞状斜齿43受到摩擦力转动,从动伞状斜齿43带动螺纹柱48进行同步运动,螺纹柱48表面的螺纹与交互台49内壁的螺纹相互匹配,交互台49受到升降杆41的限位,所以交互台49随着升降杆41沿着连接台42发生滑动,以此对交互机构3的纵向位置进行调整,指纹仪32采集使用者的手指指纹,同时利用红
外光学动作捕捉设备31,采集使用者手指的姿态,姿态预测模块8利用手指指纹图像作为输入,利用手指姿态角作为label,训练深度学习预测模型,最终通过控制中心7对进程控制,使得与之相连的外接设备进行相应的控制操作。
29.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
