1.本发明属于车载激光雷达点云数据处理技术领域,具体涉及一种基于车载激光点云数据的城市树木三维可视化方法。
背景技术:
2.激光雷达是一种主动遥感设备,突破了传统的单点测量方法,通过主动发射激光脉冲测定传感器与目标物体之间的距离。具有高精度、高分辨率、高效率的独特优势,特别能穿透地表覆盖的森林植被快速获取地形信息,为森林结构参数的提取以及树木三维可视化提供了全新的技术手段。
3.树木等植被模型是城市场景建模中不可或缺的重要组成部分。同时,三维树木模型也是虚拟场景中极具代表性的自然景观模型,已被广泛应用于虚拟旅游、虚拟城市、虚拟生态景观等方面。三维点云数据可以完美地呈现物体表面结构信息、空间信息以及物体的模型细节,能够有效避免传统的基于图像的三维重建无法直接提供空间信息的问题。构建三维树木模型可以定量提取树高、胸径等植被参数,同时也是推动林业数字化进程的基础和关键。
4.目前常用的点云三维重建方法主要有贪婪投影三角化算法、移动立方体以及泊松曲面重建算法。贪婪投影三角化算法首先通过法线将点云投影到某一平面,在二维平面上建立点云间的拓扑关系,最后得到三维的三角网格曲面模型,但该方法不能同时进行曲面平滑和孔洞修复;移动立方体算法是在三维离散数据场中通过线性插值来逼近等值面,但重建后会包含大量的三角形面片数据且信息丢失严重;泊松重建通过平滑滤波指示函数,构建柏松方程,建立表面滤波后的指示函数梯度场和表面向内法向量场的关系,求解等值面,但不能很好捕捉重建表面的局部细节。
技术实现要素:
5.针对上述存在问题或不足,本发明提供了一种基于车载激光点云数据的树木三维可视化方法,基于原始点云数据,经树木分割、树冠树干分离后,对树干和树冠单独建模,最后构建城市场景下的树木三维场景。
6.本发明具体技术方案如下:
7.步骤1、去噪与滤波:
8.由于激光雷达扫描设备的精度以及周围环境的影响,点云数据中经常包含噪声点,因此第一步工作是去除点云中的噪声点。然后针对去噪后的点云数据进行数据滤波,得到地面点与非地面点数据。
9.步骤2、单木分割与树干树冠提取:
10.将滤波后的数据进行归一化处理。首先使用滤波得到的地面点生成数字高程模型(dem,digital elevation model),之后通过非地面点高程减去dem高度得到冠层高度模型(chm,canopy height model)。使用基于chm单木分割算法提取出单木。之后利用圆柱拟合
算法从单木中分离树干和树冠。
11.步骤3、表面重构:
12.使用alpha-shape算法对树干和树冠分别构建三维模型,步骤如下:
13.3-1、设置距离阈值α
14.3-2、构建待建模点集q={qi},(i=1,2,
…
n),从中任选一个点q1,与之距离小于2α的点构成新的点集q1,从点集q1中任取一组点q2和q3,求出过点q1、q2、q3且半径为α的球以及球心o1、o2;
15.3-3、遍历点集q1,依次求出其他点到球心o1、o2的距离集合l1、l2。如果l1和l2中有一个集合的距离均大于α,则q1、q2、q3为边缘轮廓点,连接三点构成边界三角面片;反之,则不是边缘轮廓点,停止遍历,执行下一步;
16.3-4、选择点集q1中的下一组点按步骤(2)、(3)进行判断,直到点集q1中的所有点判断结束。输出三角面片集合,集合中暴露的三角面片形成局部凸包;
17.3-5、选择点集q中下一个点按步骤(2)、(3)、(4)进行判断,直到点集q中的所有点判断结束,多个凸包重构表面s(q)。
18.步骤4、三维可视化:
19.将单株树木对应的树干树冠模型组合,完成城市树木三维可视化。
20.步骤3所涉及的原理:
21.alpha-shape的原理:
22.假设有一点集p,其alpha-shape是一个由点集p和半径参数α决定的唯一多边形。可设想成存在一个半径为α的圆,从点集p外某一点开始滚动。若α足够大,那么这个圆就不会滚到点集p的内部,则这个圆滚动的痕迹就是点集p的边界线。若α很大,则检测出的边界线是点集p的凸包。同理,三维空间的alpha-shape算法则是通过三点作半径为α的球来判断边界点,并在得到的边界点处建立三角面片,重构出曲面。
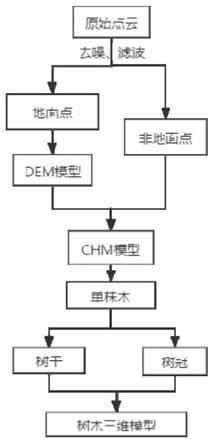
23.本发明首先对点云进行去噪和滤波处理,从原始车载激光雷达点云中分离出地面点和非地面点;再利用非地面点得到的数字高程模型对非地面点进行高程归一化处理,得到冠层高度模型;再使用基于chm的单木分割算法提取单株木,使用圆柱拟合算法分离单株木的树冠和树干;然后使用alpha-shape算法将树冠树干分别建模,最后得到城市场景下的树木三维可视化模型,其流程如图1所示。
24.本发明是通过车载激光雷达获取城市树木三维激光点云数据,并根据树干和树冠点云不同的三维分布特征,经过去噪与滤波、点云归一化、单木分割、树干树冠分离,完成树木三维可视化,建立基于原始激光点云从城市场景中提取树木并进行三维可视化的方法。
25.综上所述,本发明相比于传统的树木三维建模方法,能够根据树干和树冠的不同形态特征进行单独建模,避免了单树建模形态特征表达不精确的缺点,能够简单、快速、准确地构建出城市树木三维模型。
附图说明
26.图1为本发明的流程示意图;
27.图2为单木分割结果示意图;
28.图3为树干、树冠分离结果图;a.plot1树干集结果图;b.plot2树冠集结果图;
29.图4为alpha-shape原理图;
30.图5为树木三维可视化结果图;a.plot1单株木结果图;b.plot2所有树木结果图。
具体实施方式
31.以下通过一个样方的实施并结合附图对本发明作进一步详细说明。本实例开发环境microsoft visual studio 2019、外部库pcl1.12.0、编程语言c 。
32.一种基于车载激光点云数据的城市树木三维可视化方法,包括以下步骤:
33.步骤1,以某校车载激光点云数据为例开展城市树木三维可视化表达,数据使用ssw-2型车载激光扫描仪获取,点云中包括车载系统获取的所有地物信息,如地面、行道树、建筑物、绿化带、基础公共设施等,其中行道树包括独立行道树、相连行道树,点云密度为平均201点/米2。使用cloudcompare软件对获取的点云数据进行去噪处理,使用csf滤波算法将去噪后的点云分为地面点与非地面点。
34.步骤2,使用非地面点数据插值生成dem模型,分辨率设置为0.1m。非地面点云高程值减去所对应的dem高程值得到chm模型,使用基于chm模型的单木分割算法得到249棵单木。使用基于圆柱拟合的树干提取算法,分离出树干和树冠。圆环高度h设置为0.1m,圆环拟合误差阈值为0.25,半径变化百分比阈值为0.3,移动步长设置为0.1m。
35.步骤3,从树冠集中,每次取出单一树木的树冠进行表面重建,α值设为0.35,rgb值设为0,90,0;从树干集中,每次取出单一树木的树干,α值设为0.1,rgb值设为140,90,50,拼接得到单株树木的三维模型。对所有单株树木的树冠和树干建模完成后,得到城市场景下的树木三维可视化模型。
36.步骤4,精度检验。经过以上几步,最终得到树木三维模型如图所示。从模型精度方面进行检验,如图所示,和三维点云对比可以看出,该方法准确地从原始点云中提取出了单木点云并分离出树干和树冠,树木三维模型较好地还原了树木的形态特征。但是由于点云密度较低,对树冠内部更精细程度的建模还存在一定的优化空间。
37.该实例根据本发明提出的方法,对样地地面激光雷达数据进行处理,依照方法步骤,依次对点云进行了去噪、滤波、单木分割以及树干树冠分离,都取得了较好地精度,说明该方法在城市场景下的树木三维可视化方面具有较好的效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。