1.本发明涉网络化系统控制领域,尤其涉及的是一种基于事件触发机制的随机时滞网络化系统控制方法。
背景技术:
2.随着科技的发展和社会的不断进步,网络化控制系统因其布线少、使用范围广等优点得到越来越多应用,这也使得很多高校和研究机构开始广泛的研究。在网络化控制系统中,系统各个单元通过公共网络进行连接,信号通过通信网络进行传输和交换。经过网络进行信息交互的通信方式也给网络化控制系统的分析与设计提出了新的机遇和挑战,比如通信噪声、网络丢包、时延、带宽限制等,在其中噪声干扰和时延会增加系统的随机性从而导致系统的不稳定,传统的控制理论方法已经难以应用到这类网络化控制系统中。
技术实现要素:
3.本发明中基于事件触发机制的随机时滞系统网络化系统控制方法包含以下步骤:
4.s1、考虑以下线性网络控制系统模型:
5.x(k 1)=(i a)x(k) bu(k),
6.其中x(k)∈rn是系统的状态向量,u(k)∈rm是控制输入的向量,i是单位矩阵,a∈rn×n,b∈rn×m。
7.s2、事件触发控制器设计
8.事件触发条件下的反馈控制协议可以设计为以下形式:
9.u(k)=kx(k
i-τ1) δx(k
i-τ2)ξ(k)
10.其中k∈rm×n是要设计的控制增益,τ1,τ2≥0是两种不同的固定输入时延,δ≥0是噪声强度,ξ(k)是标准的高斯白噪声在完全概率空间(ω,f,p)上定义且
11.e{ξ(k)}=0,e{ξ2(k)}=1,e{ξi(k)ξj(k)}=0(i≠j)
12.定义k0=k0,k1,...,ki,...是触发时刻,由下述事件触发条件决定
13.k
i 1
=inf{s>ki∣e(s)
t
φe(s)≥ηx(s)
t
φx(s)}
14.其中η是待设计的事件触发阈值参数,φ∈rn×n是待设计的权重矩阵,定义e(k)=x(ki)-x(k),值得注意的是,以前文献的反馈控制是在考虑节省网络资源的情况下,基于确定性项的或者是只包含时延和噪声的一项。在本文中,我们对这两类控件的组合感兴趣。也就是说,在考虑节省网络资源的情况下,反馈控制由噪声项和确定性项两项组成。另外,在这两项中考虑了不同的时延,这样更加贴合实际。
15.s3、引入事件触发机制后,重构的闭环系统模型为
[0016][0017]
其中
[0018]
s4、此次我们旨在利用静态事件触发方案给出了闭环系统均方指数稳定和几乎必然指数稳定的充分条件,得到显式的系统稳定性判据。首先我们给出如下定义和引理。
[0019]
引理1:对于给定的正常数γ>0,c>0使得闭环系统满足
[0020][0021]
我们称闭环系统是均方和几乎必然指数稳定的。
[0022]
引理2:对于任意具有同等维数的矩阵x和y,正定矩阵e,存在标量ε》0,满足以下不等式
[0023]
x
t
ey y
t
ex≤εx
t
ex ε-1yt
ey
[0024]
构造退化的lyapunov泛函
[0025]
v(k)=v1(k) (1 ε)v2(k)
[0026][0027]
其中,ε>0,
[0028]
根据退化的lyapunov泛函,推导出闭环系统均方指数稳定和几乎必然指数稳定的充分条件,得到显式的系统稳定性判据。我们得到如下定理
[0029]
定理1:如果存在一个正定矩阵p>0和一个正常数ε》0,使得
[0030][0031]
其中β=η(1 τ1 ε-1
) 2δ2(1 η) (1 ε)τ1,事件触发条件中的待设计权重矩阵那么在事件触发条件条件下,闭环系统是均方和几乎必然指数稳定的。
[0032]
与以往基于事件触发机制的随机时滞系统不同的时,我们得到的时滞依赖稳定性判据是显式的而不是复杂的lmi,能直观的看出系统参数、时延、事件触发阈值参数、噪声强度之间的依赖关系。并由此我们能得出时间延迟的显式上界和系统无时延时的稳定性判据。
[0033]
定理2:根据定理1,我们得到显式的时间延迟的容许范围为
[0034][0035]
其中
[0036]
特别地,当时滞(τ1,τ2)为零时,此时系统模型具有以下形式
[0037][0038]
其中此时李雅普诺夫泛函选取为v(k)=x
t
(k)px(k),因此我们也可以直接得到无时滞的稳定性判据和相应的充分条件。
[0039]
定理3:假设时延消失,即τ1=0,τ2=0。存在一个正定矩阵p》0,和一个正常数ε,使得
[0040][0041]
其中γ=η(1 ε-1
) 2δ2(1 η),那么具有事件触发机制的上述无时延闭环系统是均
方和几乎必然指数稳定的。
[0042]
有益效果
[0043]
本发明提出了一种基于事件触发机制的随机时滞系统网络化系统控制方法,考虑一类线性系统,与已发表文献所不同的是,事件触发控制器同时包含了时延和噪声,基于退化的lyapunov泛函,推导出系统均方指数和几乎必然指数的显式稳定性准则而不是复杂的lmi,并得到了显式的时延上界,可以直观的看到系统参数、事件触发阈值参数、时延、噪声强度之间的关系,设计的控制器可以使系统稳定并达到节约网络资源的目的。
附图说明
[0044]
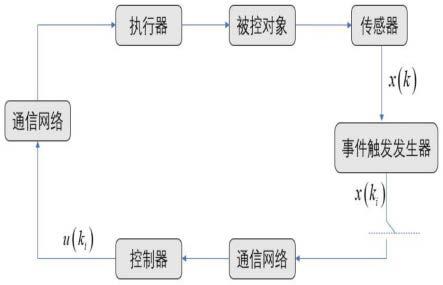
图1:事件触发机制流程图
[0045]
图2:状态x(k)的轨迹
[0046]
图3:控制器u(k)的轨迹
[0047]
图4:事件触发间隔
具体实施方式
[0048]
本发明中基于事件触发机制的随机时滞系统网络化系统控制方法包含以下步骤:
[0049]
s1、考虑以下线性网络控制系统模型:
[0050]
x(k 1)=(i a)x(k) bu(k),
[0051]
其中x(k)∈rn是系统的状态向量,u(k)∈rm是控制输入的向量,i是单位矩阵,a∈rn×n,b∈rn×m。
[0052]
s2、事件触发控制器设计
[0053]
事件触发条件下的反馈控制协议可以设计为以下形式:
[0054]
u(k)=kx(k
i-τ1) δx(k
i-τ2)ξ(k)
[0055]
其中k∈rm×n是要设计的控制增益,τ1,τ2≥0是两种不同的固定输入时延,δ≥0是噪声强度,ξ(k)是标准的高斯白噪声在完全概率空间(ω,f,p)上定义且
[0056]
e{ξ(k)}=0,e{ξ2(k)}=1,e{ξi(k)ξj(k)}=0(i≠j)
[0057]
定义k0=k0,k1,...,ki,...是触发时刻,由下述事件触发条件决定
[0058]ki 1
=inf{s>ki∣e(s)
t
φe(s)≥ηx(s)
t
φx(s)}
[0059]
其中η是待设计的事件触发阈值参数,φ∈rn×n是待设计的权重矩阵,定义e(k)=x(ki)-x(k),值得注意的是,以前文献的反馈控制是在考虑节省网络资源的情况下,基于确定性项的或者是只包含时延和噪声的一项。在本文中,我们对这两类控件的组合感兴趣。也就是说,在考虑节省网络资源的情况下,反馈控制由噪声项和确定性项两项组成。另外,在这两项中考虑了不同的时延,这样更加贴合实际。
[0060]
s3、引入事件触发机制后,重构的闭环系统模型为
[0061][0062]
其中
[0063]
s4、此次我们旨在利用静态事件触发方案给出了闭环系统均方指数稳定和几乎必然指数稳定的充分条件,得到显式的系统稳定性判据。首先我们给出如下定义和引理。
[0064]
引理1:对于给定的正常数γ>0,c>0使得闭环系统满足
[0065][0066]
我们称闭环系统是均方和几乎必然指数稳定的。
[0067]
引理2:对于任意具有同等维数的矩阵x和y,正定矩阵e,存在标量ε》0,满足以下不等式
[0068]
x
t
ey y
t
ex≤εx
t
ex ε-1yt
ey
[0069]
构造退化的lyapunov泛函
[0070]
v(k)=v1(k) (1 ε)v2(k)
[0071][0072]
其中,ε>0,
[0073]
根据退化的lyapunov泛函,推导出闭环系统均方指数稳定和几乎必然指数稳定的充分条件,得到显式的系统稳定性判据。我们得到如下定理
[0074]
定理1:如果存在一个正定矩阵p>0和一个正常数ε》0,使得
[0075][0076]
其中β=η(1 τ1 ε-1
) 2δ2(1 η) (1 ε)τ1,事件触发条件中的待设计权重矩阵那么在事件触发条件条件下,闭环系统是均方和几乎必然指数稳定的。
[0077]
与以往基于事件触发机制的随机时滞系统不同的时,我们得到的时滞依赖稳定性判据是显式的而不是复杂的lmi,能直观的看出系统参数、时延、事件触发阈值参数、噪声强度之间的依赖关系。并由此我们能得出时间延迟的显式上界和系统无时延时的稳定性判据。
[0078]
定理2:根据定理1,我们得到显式的时间延迟的容许范围为
[0079][0080]
其中
[0081]
特别地,当时滞(τ1,τ2)为零时,此时系统模型具有以下形式
[0082][0083]
其中此时李雅普诺夫泛函选取为v(k)=x
t
(k)px(k),因此我们也可以直接得到无时滞的稳定性判据和相应的充分条件。
[0084]
定理3:假设时延消失,即τ1=0,τ2=0。存在一个正定矩阵p》0,和一个正常数ε,使得
[0085]
[0086]
其中那么具有事件触发机制的上述无时延闭环系统是均方和几乎必然指数稳定的。
[0087]
s5、本方案的实施关键点:
[0088]
与以往事件触发控制器不同,此次控制器同时考虑了时延项和噪声项,且在这两项中考虑了不同的时延,这样更加贴合实际。
[0089]
构造了退化的lyapunov泛函,得到了闭环系统在均方指数和几乎必然指数稳定下的充分条件,与以往文献不同的是,得到了显式的时滞依赖稳定性判据而不是复杂的lmi,可以清楚得看到系统参数、时延、噪声强度、事件触发阈值参数的依赖关系。并由此得到显式的时滞上界和闭环系统无时延时的稳定性判据。
[0090]
提出的事件触发机制在保证系统稳定性的同时,达到了节约网络资源的目的,具有一定的工程意义。
[0091]
s5、实施后的效果
[0092]
根据上一节所得到的时滞依赖稳定性准则,选取合适的系统参数,就可以计算得到合适的时滞容许范围,最后用matlab仿真来验证该稳定性准则的有效性。
[0093]
我们考虑如下离散时间线性系统:
[0094]
x(k 1)=1.05x(k) u(k)
[0095]
根据上一节所述,系统的控制器u(k)选择为:
[0096]
u(k)=kx(k
i-τ1) kδx(k
i-τ2)ξ(k)
[0097]
选取合适的控制器增益,事件触发阈值参数和噪声强度可以得到合适的时滞容许范围。这里,我们选取k=-0.15,η=0.05,δ=0.1,ε=0.05。所以我们可以得到时滞τ1<1.236。
[0098]
下面我们验证定理2.1,下面我们选取τ1=1,时间步长为k=172,在事件触发机制(2.8)的条件下模拟了10条样本路径。仿真结果为如下图,图2描述了状态x(k)(对于10个样本路径)呈现从原有状态收敛到0。图3描述了控制信号u(t)的变化过程,从图4事件触发间隔时间。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。