1.本实用新型涉及机器人技术领域,具体涉及一种探测机器人。
背景技术:
2.在对废弃隧道进行探测时,需要对隧道内部的断面及结构信息进行测量,便于进行下一步的修缮或重建工作,但隧道长时间废弃时,内部往往充斥着有害气体,为了保证作业人员的安全,不能让作业人员直接进入废弃隧道中,需先通过探测机器人对隧道内部进行初步探测。
3.探测机器人行走在隧道内部时,由于隧道年久失修,往往存在地面崎岖不平,存在碎石等障碍物的情况,探测机器人容易被阻挡或者行走过程中容易收到冲击而倾翻,不利于探测工作的进行。
4.在探测过程中,为保证数据传输效率,常常采用有线通信的方式,但线缆收放过程中,容易产生线缆缠绕等问题,导致探测工作不能正常进行。
5.综上所述,急需一种探测机器人以解决现有技术中存在的问题。
技术实现要素:
6.本实用新型目的在于提供一种探测机器人,以解决探测机器人在废弃隧道内部自动探测的问题。
7.为实现上述目的,本实用新型提供了一种探测机器人,包括载体平台;所述载体平台包括平台机架和设置于平台机架的两侧的履带式行走机构;所述履带式行走机构包括连接架、行走轮组件、主履带和减震器;所述主履带套设在连接架和行走轮组件上,所述减震器连接于连接架和行走轮组件之间。
8.优选的,所述履带式行走机构还包括设置于连接架上的张紧轮组件,所述张紧轮组件中的张紧轮抵靠在主履带的内表面上。
9.优选的,所述载体平台还包括前摆臂和后摆臂;所述前摆臂和后摆臂分别铰接于平台机架的两端。
10.优选的,一种探测机器人还包括设置在载体平台上的前摄像头、后摄像头、仪器仓和控制箱。
11.优选的,所述仪器仓包括单片机和与单片机连接的探测传感器;所述控制箱包括主控板和与主控板连接的通信接口。
12.优选的,一种探测机器人还包括设置于载体平台上的线缆收放装置;所述线缆收放装置包括支撑架、滚筒、辅助收线组件和辅助绕线组件;所述滚筒转动设置在支撑架上,所述辅助收线组件和辅助绕线组件均设置在支撑架上;所述辅助收线组件和辅助绕线组件上均设有绕线滑轮;所述辅助绕线组件可沿滚筒的轴线方向运动。
13.优选的,所述线缆收放装置还包括与滚筒的轴线平行的丝杆和滑杆;所述辅助绕线组件与丝杆螺纹连接,所述辅助绕线组件与滑杆滑动连接。
14.优选的,所述线缆收放装置还包括传动组件,所述传动组件连接于滚筒的转轴和丝杆之间;所述滚筒的转轴与驱动电机连接。
15.优选的,所述传动组件为带传动组件或链传动组件。
16.作为另一种优选方式,一种探测机器人还包括设置于载体平台上的无线通信装置;所述无线通信装置包括信号接收盒和天线。
17.应用本实用新型的技术方案,具有以下有益效果:
18.(1)本实用新型中,通过在载体平台的履带式行走机构中设置减震器,适用于废弃隧道内部的行走,当地面存在碎石或其他物体导致载体平台发生颠簸时,可通过减震器进行减震,使平台机架处于相对平稳的状态,减少路面情况对测量部件的影响。
19.(2)本实用新型中,履带式行走机构中设置有张紧轮组件,通过张紧轮组件使主履带保持一定的张力,从而避免主履带从连接架上脱落。
20.(3)本实用新型中,在探测机器人前进或者后退过程中,通过前摆臂或后摆臂支撑地面实现越障;前摆臂、后摆臂均安装在主履带内侧,使前摆臂或后摆臂上的皮带不容易由于外界因素脱落。
21.(4)本实用新型中,设置在载体平台上的前摄像头和后摄像头分别用于对隧道前后的路况及隧道内部结构进行观测,并向隧道外进行图像传输,便于隧道外的作业人员观察废弃隧道内部的情况。
22.(5)本实用新型中,探测传感器包括温湿度传感器、大气压传感器、一氧化碳传感器、二氧化氮传感器、硫化氢传感器、二氧化硫传感器,用于对废弃隧道内部的有害气体浓度进行探测,确认是否符合人工进入的条件。
23.(6)本实用新型中,提供了有线通信和无线通信两种通信方式,其中,有线通信方式虽然通信距离较短,但是由于信号传输不受外界环境干扰,可以深入环境复杂,形状弯曲的隧道,数据可以实时接收,传输可靠性高,延迟率低;无线通信方式虽然易受外界环境干扰,但通信距离较长,适用于直线型、条件较好的隧道探测。
24.(7)本实用新型中,通过线缆收放装置可实现有线通信时通信线缆的收放,可以避免通信线缆在地上拖行或者影响探测机器人行走。
25.(8)本实用新型中,丝杆转动时,辅助绕线组件在滑杆的导向作用下,与丝杆发生相对运动,使辅助绕线组件沿滚筒的轴线运动,将通信线缆均匀缠绕在滚筒上,避免通信线缆堆积在滚筒的某一区段,导致通信线缆被卡死。
26.(9)本实用新型中,将传动组件连接于滚筒的转轴和丝杆之间,滚筒转动时,可同步带动丝杆转动,配合实现通信线缆的收放。
27.除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
附图说明
28.构成本技术的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
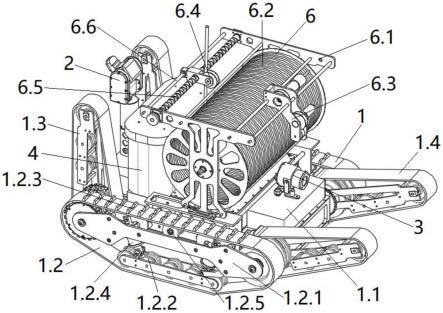
29.图1是本技术实施例1中一种探测机器人的结构示意图;
30.图2是本技术实施例1中图1的正视图;
31.图3是本技术实施例1中图1的侧视图;
32.图4是本技术实施例1中仪器仓的结构示意图;
33.图5是本技术实施例1中图4的a-a剖视图;
34.图6是本技术实施例1中图1的俯视图;
35.图7是本技术实施例2中一种探测机器人的结构示意图;
36.图8是本技术实施例2中图7的俯视图;
37.其中,1、载体平台,1.1、平台机架,1.2、履带式行走机构,1.2.1、连接架,1.2.2、行走轮组件,1.2.3、主履带,1.2.4、减震器,1.2.5、张紧轮组件,1.3、前摆臂,1.4、后摆臂,2、前摄像头,2.1、灯源,2.2、摄像头,3、后摄像头,4、仪器仓,4.1、单片机,4.2、探测传感器,4.3、仓体,4.4、仓盖,4.5、升降机构,5、控制箱,5.1、通信接口,6、线缆收放装置,6.1、支撑架,6.2、滚筒,6.3、辅助收线组件,6.4、辅助绕线组件,6.5、丝杆,6.6、滑杆,6.7、齿轮一,6.8、齿轮二,7、无线通信装置,7.1、信号接收盒,7.2、天线。
具体实施方式
38.以下结合附图对本实用新型的实施例进行详细说明,但是本实用新型可以根据权利要求限定和覆盖的多种不同方式实施。
39.实施例1:
40.参见图1至图6,一种探测机器人,本实施例应用于废弃隧道内部的信息探测。
41.一种探测机器人,参见图1,包括载体平台1和设置在载体平台1上的前摄像头2、后摄像头3、仪器仓4、控制箱5和线缆收放装置6,下面结合各部件的具体结构进行说明。
42.参见图2,所述载体平台1包括平台机架1.1和设置于平台机架1.1的左右两侧的履带式行走机构1.2;所述履带式行走机构1.2包括连接架1.2.1、行走轮组件1.2.2、主履带1.2.3和减震器1.2.4;所述主履带1.2.3套设在连接架1.2.1和行走轮组件1.2.2上,所述减震器1.2.4连接于连接架1.2.1和行走轮组件1.2.2之间。由于废弃隧道年久失修,路面崎岖不平,履带式行走机构1.2更适用于废弃隧道内部的行走,当地面存在碎石或其他物体导致载体平台1发生颠簸时,可通过减震器1.2.4进行减震,使平台机架1.1处于相对平稳的状态,减少路面情况对测量部件的影响。本实施例中,主履带1.2.3采用三节履带式设计。
43.所述履带式行走机构1.2还包括设置于连接架1.2.1上的张紧轮组件1.2.5,所述张紧轮组件1.2.5中的张紧轮抵靠在主履带1.2.3的内表面上。通过张紧轮组件1.2.5使主履带1.2.3保持一定的张力,从而避免主履带1.2.3从连接架1.2.1上脱落。
44.所述载体平台1还包括前摆臂1.3和后摆臂1.4;所述前摆臂1.3和后摆臂1.4分别铰接于平台机架1.1的前后两端。在探测机器人前进或者后退过程中,通过前摆臂1.3或后摆臂1.4支撑地面实现越障;本实施例中,前摆臂1.3或后摆臂1.4与主履带1.2.3之间的长度比例为0.4-0.5,且前摆臂1.3、后摆臂1.4均安装在主履带1.2.3内侧,使前摆臂1.3或后摆臂1.4上的皮带不容易由于外界因素脱落。
45.设置在载体平台1上的前摄像头2和后摄像头3分别用于对隧道前后的路况及隧道内部结构进行观测,并向隧道外进行图像传输,便于隧道外的作业人员观察废弃隧道内部的情况。
46.前摄像头2或后摄像头3均包括灯源和摄像头,参见图3,前摄像头2的灯源2.1为led灯源,用于对废弃隧道内部进行照明,摄像头2.2位于led灯源下方,用于对隧道内部进行拍摄。本实施例中,前摄像头2和后摄像头3均为活动设置,可在摄像头安装座上实现水平方向和竖直方向的360
°
旋转。
47.参见图4和图5,仪器仓4包括单片机4.1和与单片机4.1连接的探测传感器4.2;本实施例中,单片机4.1通过rs232串口线接入控制箱5,多个探测传感器4.2插接在单片机4.1上,探测传感器4.2包括温湿度传感器、大气压传感器、一氧化碳传感器、二氧化氮传感器、硫化氢传感器、二氧化硫传感器,用于对废弃隧道内部的有害气体浓度进行探测,确认是否符合人工进入的条件。
48.为实现对单片机4.1及探测传感器4.2的保护,在单片机4.1及探测传感器4.2外部设有仓体4.3和可自动开合的仓盖4.4,在仓体4.3内部还设有升降机构4.5、云台和二维激光雷达,单片机4.1通过螺栓固定在升降机构4.5的滑座上,通过升降机构4.5调节探测传感器4.2的位置,二维激光雷达通过云台与升降机构4.5连接,通过二维激光雷达可以扫描隧道断面,得到断面点云;二维激光雷达通过千兆网线与控制箱5连接。在探测过程中,仓盖4.4打开,便于仪器仓4内部的测量元件对隧道内部进行探测;探测结束后,仓盖4.4关闭,便于实现对各探测元件的保护。
49.控制箱5位于两条主履带1.2.3之间,设置于平台机架1.1上,所述控制箱5包括主控板和与主控板连接的通信接口5.1,通信接口5.1采用9针接口;用于接收载体平台1、前摄像头2、后摄像头3和仪器仓4的数据并进行控制处理,处理的数据包括机器人行走、支座升降、云台旋转、前后摆臂操控、摄像头、电机转速数据等;控制箱5内部还设有单轴光纤陀螺仪、倾角仪、加速度计和里程计,用于对探测机器人进行控制与导航。
50.探测机器人与外界的通信,可通过有线方式进行,也可通过无线方式进行,但由于废弃隧道内部通常信号较差,采用有线通信的方式通信信号更加稳定,本实施例中,将通信线缆的一端通过通信接口5.1与控制箱5连接,通信线缆的另一端与隧道外部的通信设备连接,用于显示废弃隧道内部的探测信息。
51.采用通信线缆实现有线通信时,其长度可达到200米,为了避免通信线缆在地上拖行或者影响探测机器人行走,探测机器人还包括设置于载体平台1上的线缆收放装置6;所述线缆收放装置6包括支撑架6.1、滚筒6.2、辅助收线组件6.3和辅助绕线组件6.4;所述滚筒6.2转动设置在支撑架6.1上,所述辅助收线组件6.3和辅助绕线组件6.4均设置在支撑架6.1上;所述辅助收线组件6.3和辅助绕线组件6.4上均设有绕线滑轮;所述辅助绕线组件6.4可沿滚筒6.2的轴线方向运动,通信线缆缠绕在滚筒6.2上,一端通过滚筒6.2上设置的通信端子与控制箱5连接,另一端依次穿过辅助绕线组件6.4、辅助收线组件6.3的绕线滑轮,连接至隧道外部的通信设备,如图6所示。
52.所述线缆收放装置6还包括与滚筒6.2的轴线平行的丝杆6.5和滑杆6.6;所述辅助绕线组件6.4与丝杆6.5螺纹连接,所述辅助绕线组件6.4与滑杆6.6滑动连接。丝杆6.5转动时,辅助绕线组件6.4在滑杆6.6的导向作用下,与丝杆6.5发生相对运动,使辅助绕线组件6.4沿滚筒6.2的轴线运动,将通信线缆均匀缠绕在滚筒6.2上,避免通信线缆堆积在滚筒6.2的某一区段,导致通信线缆在滚筒6.2顶部或底部由于高度间隙不够被卡死。
53.丝杆6.5的转动可单独通过电机驱动实现,也可通过传动组件实现,本实施例中,
所述线缆收放装置6还包括传动组件,所述传动组件连接于滚筒6.2的转轴和丝杆6.5之间;所述滚筒6.2的转轴与驱动电机连接;滚筒6.2转动时,可同步带动丝杆6.5转动。
54.所述传动组件为带传动组件或链传动组件。本实施例中,传动组件采用齿轮带传动组件,包括设置在齿轮一6.7、齿轮二6.8和套设在齿轮一6.7和齿轮二6.8的传动带(图中未示意传动带);其中齿轮一6.7是20齿的小齿轮,设置在滚筒6.2的转轴一端;齿轮二6.8是50齿的大齿轮,设置在丝杆6.5的一端;滚筒6.2转动进行线缆收放时,丝杆6.5也会同步转动,从而实现辅助绕线。
55.平台机架1.1上还设有电池组件,包括40ah的锂电池,用于为探测机器人各部件供电;控制箱5内部也设有10ah的锂电池,用于为控制箱5供电。
56.一种探测机器人的使用方法如下:将探测传感器4.2插接在单片机4.1上,将滚筒6.2上的通信线缆一端与废弃隧道外部的通信设备连接,探测机器人通过履带式行走机构1.2进入废弃隧道内部,通过前摆臂1.3和后摆臂1.4实现避障,通过减震器1.2.4缓冲避障时路面对平台机架1.1上设置的各部件的冲击;探测机器人行走过程中,通过线缆收放装置6中的滚筒6.2旋转释放通信线缆,并通过辅助绕线组件6.4和辅助收线组件6.3实现通信线缆的放线及导向;探测过程中,通过探测传感器4.2、前摄像头2、后摄像头3等部件采集探测信息,并通过控制箱5进行处理,再通过通信线缆传输至隧道外部的通信设备上;采用有线通信的方式,可以深入环境复杂,形状弯曲的隧道,数据可以实时接收,延迟率低,外界环境干扰较小。
57.探测结束后,探测机器人向隧道外行走,通过线缆收放装置6实现通信线缆收线,通过辅助绕线组件6.4将通信线缆均匀缠绕在滚筒6.2上。
58.实施例2:
59.本实施例与实施例1的区别在于,探测机器人未设置线缆收放装置6,通过无线通信装置7实现探测机器人与外界的通信。
60.参见图7和图8,无线通信装置7通过螺栓与平台机架1.1固定连接,所述无线通信装置7包括信号接收盒7.1和天线7.2,其中天线包括接收天线和发射天线,无线通信装置7通过9针接口与控制箱5的通信接口5.1连接。
61.本实施例中的无线通信装置7采用无线微波通信技术,发射功率28dbm,高接收灵敏度,802.11b/g/n协议,108mbps,净带宽30mbps以上,无遮挡条件下通信距离不少于1公里;电池组件可同时为无线通信装置7供电。
62.采用无线通信方式时,具有通信距离远,操作简便等优点,适用于直线型、条件较好的废弃隧道探测,避免数据发回时产生延迟,减少外界环境干扰。
63.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
