1.本实用新型涉及流延机技术领域,具体为一种尺寸高效调节的流延机分切机。
背景技术:
2.流延机是指制作流延膜用的专用设备,其通过数个滚轮的转动回收需要加工的料带进行移动并在移动过程中与其他进行加工的机构进行接触,其中就包括对其进行分切成所需宽度的分切机构,且客户需要不同长度和宽度的材料,现有的设备在生产过程中,对材料进行分切使用的是手动定位分别进行调节的刀片,导致使用者调节后容易出现每个刀片相对一侧的间隙不同造成切割误差影响成品精度,所以市场上亟需一种便于精准等间距调节每个刀片相邻一侧间隙的流延机分切机构。
技术实现要素:
3.本实用新型的目的在于提供一种尺寸高效调节的流延机分切机,以解决上述背景技术中市场上亟需一种便于精准等间距调节每个刀片相邻一侧间隙的流延机分切机构的问题。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:一种尺寸高效调节的流延机分切机,包括安装基板,所述安装基板的顶部固定安装有流延机,且安装基板的顶部固定安装有固定板,所述固定板的正面固定安装有传动电机,且传动电机的输出端固定安装有回收轮,且流延机与回收轮通过料带传动连接,所述固定板的正面固定安装有调节操作机构,且调节操作机构内嵌合有传动机构,所述传动机构的底部以等间隔的形式固定安装有四个切割刃,且切割刃贯穿在料带的表面。
5.可选的,所述调节操作机构包括承载臂,且承载臂的一侧焊接在固定板的正面,所述承载臂内转动连接有操作轴,且操作轴的表面固定套接有主螺纹套、次螺纹套和辅螺纹套。
6.可选的,所述传动机构包括定位块、主调节块、次调节块和辅调节块,且定位块固定安装在承载臂内,所述主调节块螺纹套接在主螺纹套的表面,且次调节块螺纹套接在次螺纹套的表面,且辅调节块螺纹套接在辅螺纹套的表面,且四个切割刃分别固定安装在定位块、主调节块、次调节块和辅调节块的底部。
7.可选的,所述操作轴延伸至承载臂外部的一端固定安装有操作钮,且承载臂的正面与背面均开设有刻度纹。
8.可选的,所述次螺纹套的长度与螺纹间隙均为为主螺纹套长度和螺纹间隙的倍,且辅螺纹套的长度与螺纹间隙均为为主螺纹套长度和螺纹间隙的倍,所述承载臂的正面与背面均开设有刻度纹。
9.可选的,所述定位块、主调节块、次调节块和辅调节块的侧剖面均呈t形,且主调节块、次调节块和辅调节块内的螺纹间隙分别与主螺纹套、次螺纹套和辅螺纹套表面的螺纹间隙相同。
10.本实用新型的技术效果和优点:
11.1、通过使用者转动操作轴使其带动主螺纹套、次螺纹套和辅螺纹套进行同方向转动,此时借助丝杆原理使主螺纹套、次螺纹套和辅螺纹套在转动过程中带动主调节块、次调节块和辅调节块进行横向移动,而由于主螺纹套、次螺纹套和辅螺纹套的螺纹间隙倍数差距保证了四个切割刃每相邻的两个相对一侧的间隙相同,仅需使用者进行单一操作便能带动三个切割刃同步进行移动使操作极其简便的同时也此保证了在使用者操作后每个刀片相邻的间隙均相同。
12.2、通过使用者启动流延机和传动电机使回收轮带动料带进行回卷的过程中加工完成的料带直接与切割刃接触并被分切以保证被回收轮回卷完成的料带均为分切完的半成品状态。
附图说明
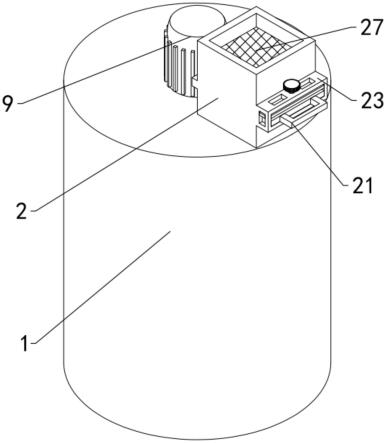
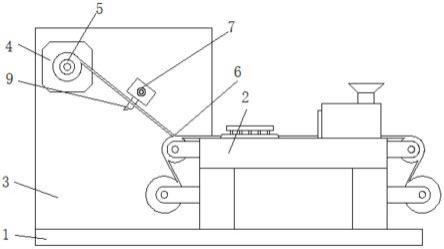
13.图1为本实用新型结构的正面示意图;
14.图2为本实用新型承载臂结构的俯剖面示意图;
15.图3为本实用新型承载臂结构的仰视示意图。
16.图中:1安装基板、2流延机、3固定板、4传动电机、5回收轮、6料带、7调节操作机构、8传动机构、9切割刃、701承载臂、702操作轴、703主螺纹套、704次螺纹套、705辅螺纹套、801定位块、802主调节块、803次调节块、804辅调节块。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
18.本实用新型提供了如图1-3所示的一种尺寸高效调节的流延机分切机,包括安装基板1,安装基板1的顶部固定安装有流延机2,该流延机2通过220v市电连接,其控制电源外置,且安装基板1的顶部固定安装有固定板3,固定板3的正面固定安装有传动电机4,该传动电机4通过220v市电连接,其控制电源外置。
19.传动电机4的输出端固定安装有回收轮5,且流延机2与回收轮6通过料带6传动连接,固定板3的正面固定安装有调节操作机构7,且调节操作机构7内嵌合有传动机构8,传动机构8的底部以等间隔的形式固定安装有四个切割刃9,且切割刃9贯穿在料带6的表面。
20.通过使用者启动流延机2和传动电机4使回收轮5带动料带6进行回卷的过程中加工完成的料带6直接与切割刃9接触并被分切以保证被回收轮5回卷完成的料带均为分切完的半成品状态。
21.调节操作机构7包括承载臂701,且承载臂701的一侧焊接在固定板3的正面,承载臂701内转动连接有操作轴702,操作轴702延伸至承载臂701外部的一端固定安装有操作钮,且承载臂701的正面与背面均开设有刻度纹,且操作轴702的表面固定套接有主螺纹套703、次螺纹套704和辅螺纹套705。
22.传动机构8包括定位块801、主调节块802、次调节块803和辅调节块804,且定位块801固定安装在承载臂701内,主调节块802螺纹套接在主螺纹套703的表面,次螺纹套704的
长度与螺纹间隙均为为主螺纹套703长度和螺纹间隙的2倍,且辅螺纹套705的长度与螺纹间隙均为为主螺纹套703长度和螺纹间隙的3倍。
23.次调节块803螺纹套接在次螺纹套704的表面,且辅调节块804螺纹套接在辅螺纹套705的表面,且四个切割刃9分别固定安装在定位块801、主调节块802、次调节块803和辅调节块804的底部。
24.定位块801、主调节块802、次调节块803和辅调节块804的侧剖面均呈t形,且主调节块802、次调节块803和辅调节块804内的螺纹间隙分别与主螺纹套703、次螺纹套704和辅螺纹套705表面的螺纹间隙相同。
25.通过使用者转动操作轴702使其带动主螺纹套703、次螺纹套704和辅螺纹套705进行同方向转动,此时借助丝杆原理使主螺纹套703、次螺纹套704和辅螺纹套705在转动过程中带动主调节块802、次调节块803和辅调节块804进行横向移动,而由于次螺纹套704的螺纹间隙为主螺纹套表面703螺纹间隙的两倍使次调节块803会移动主调节块802移动距离的两倍。
26.由于次螺纹套704的螺纹间隙为主螺纹套表面703螺纹间隙的三倍使辅调节块804会移动主调节块802移动距离的三倍,仅需使用者进行单一操作便能带动三个切割刃9同步进行移动使操作极其简便的同时,也此保证了在使用者操作后每个刀片相邻的间隙均相同。
27.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。