1.本实用新型涉及技术领域,特别涉及一种带归中功能的无人机停机坪。
背景技术:
2.无人机停机坪是放置在无人机停机库内,用于给无人机升降提供平台的。但是,由于一些技术难度的存在,无人机经常难以停靠在停机坪上的中心位置,总而无法实现自动入库等,常常需要人们进行手动调整,造成了使用上的不便。
技术实现要素:
3.本实用新型所要解决的技术问题是:提供一种带归中功能的无人机停机坪,实现自动归中,使得无人机使用起来更加方便。
4.为了解决上述技术问题,本实用新型采用的技术方案为:
5.一种带归中功能的无人机停机坪,包括停机平台和归中组件;
6.所述归中组件包括驱动装置、传动组件、横向杆和纵向杆;
7.两根所述横向杆和两根所述纵向杆在所述停机平台上水平设置并组成口字形结构;
8.一个所述驱动装置通过一个所述传动组件与两根所述横向杆相连,另一所述驱动装置通过另一所述传动组件与所述纵向杆相连;
9.所述纵向杆和所述横向杆在竖直方向上相错位;
10.所述驱动装置通过所述传动组件与两根所述横向杆或两根所述纵向杆传动连接,使得两根所述横向杆或两根所述纵向杆相互靠近或远离。
11.进一步地,所述传动组件包括第一转轮、第二转轮、第三转轮、第四转轮、连接件和传动带;
12.所述第一转轮和所述第二转轮可水平转动地设置于所述停机平台底部,且位置分别对应一根所述横向杆或所述纵向杆的两个端部;
13.所述第三转轮和所述第四转轮可水平转动地设置于所述停机平台底部,且位置分别对应另一根所述横向杆或所述纵向杆的两个端部;
14.所述第一转轮和所述第三转轮分别对应两根所述横向杆或所述纵向杆位于同侧的一端;
15.所述传动带按先后顺序依次绕过所述第一转轮、所述第三转轮、所述第四转轮和所述第二转轮设置并形成半包围状的链传动结构;
16.所述传动带在所述链传动结构内上分为外侧带和内侧带;
17.两根所述横向杆或所述纵向杆位于同侧的一端分别通过一个所述连接件与位于所述第一转轮和所述第三转轮之间的所述外侧带和所述内侧带相连,使得两根所述横向杆或所述纵向杆位于同侧的一端在所述传动带传动时相互靠近或远离;
18.两根所述横向杆或所述纵向杆位于同侧的另一端分别通过一个所述连接件与位
于所述第二转轮和所述第四转轮之间的所述内侧带和所述外侧带相连,使得两根所述横向杆或所述纵向杆位于同侧的另一端在所述传动带传动时相互靠近或远离。
19.进一步地,所述停机平台上在两根所述横向杆或所述纵向杆位于同侧的端部之间的位置设有一限位件,用于限制所述横向杆或所述纵向杆的移动距离。
20.进一步地,所述限位件为t形件;
21.所述t形件在水平方向上的两端分别朝向两根所述横向杆或所述纵向杆位于同侧的端部设置。
22.进一步地,所述驱动装置包括电机和驱动轮;
23.所述电机固定于所述停机平台底部;
24.所述电机通过所述驱动轮与所述传动带传动连接。
25.进一步地,还包括制动装置;
26.所述制动装置包括停止按键和触发件;
27.所述触发件固定于所述传动带上,使得所述触发件跟随所述传动带移动;
28.所述停止按键设置于在所述触发件的移动路径上,且按键方向朝向所述触发件设置;
29.所述停止按键与所述驱动装置电连接。
30.进一步地,还包括降落定位二维码;
31.所述降落定位二维码设置于所述停机平台上的中心位置。
32.进一步地,所述降落定位二维码包括第一二维码和第二二维码;
33.所述第二二维码嵌套于所述第一二维码内。
34.进一步地,所述横向杆或所述纵向杆为无人机接触式充电杆。
35.本实用新型的有益效果在于:提供一种带归中功能的无人机停机坪,在停机平台上水平设置两根横向杆和两根纵向杆并组成口字形结构,利用两套驱动装置和传动组件分别控制横向杆和纵向杆,使得两根横向杆和两根纵向杆各自相互靠近或远离,从而实现归中,使得无人机使用起来更加方便。
附图说明
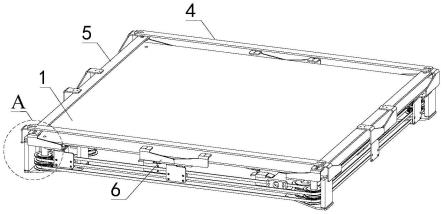
36.图1为本实用新型实施例的一种带归中功能的无人机停机坪的结构主视图;
37.图2为本实用新型实施例涉及的一种带归中功能的无人机停机坪的俯视图;
38.图3为本实用新型实施例涉及的一种带归中功能的无人机停机坪的背视图;
39.图4为本实用新型实施例涉及的一种带归中功能的无人机停机坪的对应连接横向杆的传动组件与连接件的连接示意图;
40.图5为本实用新型实施例涉及的一种带归中功能的无人机停机坪的对应连接纵向杆的传动组件与连接件的连接示意图;
41.图6为图1中a处结构的放大示意图。
42.标号说明:
43.1、停机平台;2、驱动装置;3、传动组件;4、横向杆;5、纵向杆;6、限位件;7、停止按键;8、触发件;9、降落定位二维码;
44.21、电机;22、驱动轮;
45.31、第一转轮;32、第二转轮;33、第三转轮;34、第四转轮;35、连接件;36、传动带;
46.361、外侧带;362、内侧带;
47.91、第一二维码;92、第二二维码。
具体实施方式
48.为详细说明本实用新型的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
49.请参照图1至图6,一种带归中功能的无人机停机坪,包括停机平台1和归中组件;
50.所述归中组件包括驱动装置2、传动组件3、横向杆4和纵向杆5;
51.两根所述横向杆4和两根所述纵向杆5在所述停机平台1上水平设置并组成口字形结构;
52.一个所述驱动装置2通过一个所述传动组件3与两根所述横向杆4相连,另一所述驱动装置2通过另一所述传动组件3与所述纵向杆5相连;
53.所述纵向杆5和所述横向杆4在竖直方向上相错位;
54.所述驱动装置2通过所述传动组件3与两根所述横向杆4或两根所述纵向杆5传动连接,使得两根所述横向杆4或两根所述纵向杆5相互靠近或远离。
55.从上述描述可知,本实用新型的有益效果在于:在停机平台1上水平设置两根横向杆4和两根纵向杆5并组成口字形结构,利用两套驱动装置2和传动组件3分别控制横向杆4和纵向杆5,使得两根横向杆4和两根纵向杆5各自相互靠近或远离,从而实现归中,使得无人机使用起来更加方便。
56.进一步地,所述传动组件3包括第一转轮31、第二转轮32、第三转轮33、第四转轮34、连接件35和传动带36;
57.所述第一转轮31和所述第二转轮32可水平转动地设置于所述停机平台1底部,且位置分别对应一根所述横向杆4或所述纵向杆5的两个端部;
58.所述第三转轮33和所述第四转轮34可水平转动地设置于所述停机平台1底部,且位置分别对应另一根所述横向杆4或所述纵向杆5的两个端部;
59.所述第一转轮31和所述第三转轮33分别对应两根所述横向杆4或所述纵向杆5位于同侧的一端;
60.所述传动带36按先后顺序依次绕过所述第一转轮31、所述第三转轮33、所述第四转轮34和所述第二转轮32设置并形成半包围状的链传动结构;
61.所述传动带36在所述链传动结构内上分为外侧带361和内侧带362;
62.两根所述横向杆4或所述纵向杆5位于同侧的一端分别通过一个所述连接件35与位于所述第一转轮31和所述第三转轮33之间的所述外侧带361和所述内侧带362相连,使得两根所述横向杆4或所述纵向杆5位于同侧的一端在所述传动带36传动时相互靠近或远离;
63.两根所述横向杆4或所述纵向杆5位于同侧的另一端分别通过一个所述连接件35与位于所述第二转轮32和所述第四转轮34之间的所述内侧带362和所述外侧带361相连,使得两根所述横向杆4或所述纵向杆5位于同侧的另一端在所述传动带36传动时相互靠近或远离。
64.从上述描述可知,通过第一转轮31、第二转轮32、第三转轮33、第四转轮34和传动
带36组成链传动结构,通过连接件35将两根横向杆4或纵向杆5的端部分别连接在同一时间内移动方向相反的外侧带361和内侧带362上,依靠传动带36的传动使得两根横向杆4或两根纵向杆5相互靠近或远离,从而实现单个驱动装置2同时控制两根横向杆4或纵向杆5,更加便捷地实现自动归中。
65.进一步地,所述停机平台1上在两根所述横向杆4或所述纵向杆5位于同侧的端部之间的位置设有一限位件6,用于限制所述横向杆4或所述纵向杆5的移动距离。
66.从上述描述可知,在两根横向杆4或两根纵向杆5的端部的移动轨迹上设置限位件6,从而有效限制横向杆4或两根纵向杆5移动距离,避免其在归中过程中对无人机的底座产生挤压夹紧的作用力而造成装置损坏。
67.进一步地,所述限位件6为t形件;
68.所述t形件在水平方向上的两端分别朝向两根所述横向杆4或所述纵向杆5位于同侧的端部设置。
69.从上述描述可知,限位件6为t形件,依靠其水平方向上的两端分别对两根横向杆4或纵向杆5位于同侧的端部进行顶靠限位,便于规划无人机归中后的停留区域。
70.进一步地,所述驱动装置2包括电机21和驱动轮22;
71.所述电机21固定于所述停机平台1底部;
72.所述电机21通过所述驱动轮22与所述传动带36传动连接。
73.从上述描述可知,利用电机21和驱动轮22相配合,驱动传动带36进行传动,其组成结构简单,易于控制。
74.进一步地,还包括制动装置;
75.所述制动装置包括停止按键7和触发件8;
76.所述触发件8固定于所述传动带36上,使得所述触发件8跟随所述传动带36移动;
77.所述停止按键7设置于在所述触发件8的移动路径上,且按键方向朝向所述触发件8设置;
78.所述停止按键7与所述驱动装置2电连接。
79.从上述描述可知,将触发件8设置在传动带36上,与停止按键7相配合,有效控制传动带36的传动距离,即控制驱动装置2进行单次归中所需的工作时长,从而实现精准归中。
80.进一步地,还包括降落定位二维码9;
81.所述降落定位二维码9设置于所述停机平台1上的中心位置。
82.从上述描述可知,在停机平台1上的中心位置设置降落定位二维码9,便于无人机进行扫描识别,从而提高其降落位置的准确性。
83.进一步地,所述降落定位二维码9包括第一二维码91和第二二维码92;
84.所述第二二维码92嵌套于所述第一二维码91内。
85.从上述描述可知,在第一二维码91内嵌套第二二维码92,使得无人机在依靠第一二维码91定位降落的同时还能够依据第二二维码92的位置来确定自身的朝向等等。
86.进一步地,所述横向杆4或所述纵向杆5为无人机接触式充电杆。
87.从上述描述可知,横向杆4或所述纵向杆5为无人机接触式充电杆,在推动无人机底座实现归中的同时,还能够对无人机进行充电,使用起来更加方便。
88.本实用新型的一种带归中功能的无人机停机坪能够适用于无人机停靠归中的场
景,以下通过具体的实施方式进行说明:
89.请参照图1至图6,本实用新型的实施例一为:
90.一种带归中功能的无人机停机坪,如图1和图3所示,包括停机平台1和归中组件。其中,归中组件包括驱动装置2、传动组件3、横向杆4和纵向杆5。两根横向杆4和两根纵向杆5在停机平台1上水平设置并组成口字形结构。一个驱动装置2通过一个传动组件3与两根横向杆4相连,另一驱动装置2通过另一传动组件3与纵向杆5相连。纵向杆5和横向杆4在竖直方向上相错位。驱动装置2通过传动组件3与两根横向杆4或两根纵向杆5传动连接,使得两根横向杆4或两根纵向杆5相互靠近或远离。
91.在本实施例中,如图3至图5所示,传动组件3包括第一转轮31、第二转轮32、第三转轮33、第四转轮34、连接件35和传动带36。
92.其中,如图4所示,对应连接横向杆4的一个传动组件3的分布位置为:第一转轮31和第二转轮32可水平转动地设置于停机平台1底部,且位置分别对应一根横向杆4的两个端部。第三转轮33和第四转轮34可水平转动地设置于停机平台1底部,且位置分别对应另一根横向杆4的两个端部。第一转轮31和第三转轮33分别对应两根横向杆4位于同侧的一端。传动带36按先后顺序依次绕过第一转轮31、第三转轮33、第四转轮34和第二转轮32设置并形成半包围状的链传动结构。
93.并且,如图5所示,对应连接纵向杆5的一个传动组件3的分布位置与上述相似,只不过对应纵向杆5的端部的位置而导致第一转轮31、第二转轮32、第三转轮33和第四转轮34的位置不同。此处不再赘述。并且,如图6所示,两个传动组件3的不同转轮在停机平台1下的同一位置时通过套接在一个转轴上实现可转动设计。
94.并且,传动带36在链传动结构内上分为外侧带361和内侧带362。两根横向杆4位于同侧的一端分别通过一个连接件35与位于第一转轮31和第三转轮33之间的外侧带361和内侧带362相连,使得两根横向杆4位于同侧的一端在传动带36传动时相互靠近或远离。两根横向杆4位于同侧的另一端分别通过一个连接件35与位于第二转轮32和第四转轮34之间的内侧带362和外侧带361相连,使得两根横向杆4位于同侧的另一端在传动带36传动时相互靠近或远离。
95.在本实施例中,一种带归中功能的无人机停机坪的横向杆4在归中过程运动原理为:
96.如图4所示,对应连接横向杆4的驱动装置2驱动链传动结构逆时针转动为例:
97.其一,当传动带36逆时针传动时,位于第一转轮31和第三转轮33之间的外侧带361以及位于第二转轮32和第四转轮34之间的内侧带362均为向下(箭头所示)传动;并且,位于向下传动的这条外侧带361和内侧带362上的连接件35分别连接的是图2中位于上方的横向杆4,故此横向杆4向下移动;与之相反的,位于第一转轮31和第三转轮33之间的内侧带362以及位于第二转轮32和第四转轮34之间的外侧带361均为向上(箭头所示)传动;并且,位于向上传动的这条外侧带361和内侧带362上的连接件35分别连接的是图2中位于下方的横向杆4,故此横向杆4向上移动;由此,两根横向杆4共同向停机平台1的中心靠拢。
98.其二,与上述实现原理相似,对应连接纵向杆5的驱动装置2驱动链传动结构顺时针转动,如图5所示,位于第一转轮31和第三转轮33之间的外侧带361以及位于第二转轮32和第四转轮34之间的内侧带362均为向左(箭头所示)传动;并且,位于向左传动的这条外侧
带361和内侧带362上的连接件35分别连接的是图2中位于右边的纵向杆5,故此纵向杆5向左移动;与之相反的,位于第一转轮31和第三转轮33之间的内侧带362以及位于第二转轮32和第四转轮34之间的外侧带361均为向右(箭头所示)传动;并且,位于向右传动的这条外侧带361和内侧带362上的连接件35分别连接的是图2中位于左边的纵向杆5,故此纵向杆5向右移动;由此,两根纵向杆5共同向停机平台1的中心靠拢。两根横向杆4和两根纵向杆5就完成了归中。
99.在本实施例中,如图1和图2所示,停机平台1上在两根横向杆4位于同侧的端部之间的位置设有一限位件6,用于限制横向杆4的移动距离。相对应的,纵向杆5的端部之间也设有同样的限位件6。并且,限位件6为t形件。t形件在水平方向上的两端分别朝向两根横向杆4或纵向杆5位于同侧的端部设置。
100.在本实施例中,如图4所示,驱动装置2包括电机21和驱动轮22。电机21固定于停机平台1底部。电机21通过驱动轮22与传动带36传动连接。
101.在本实施例中,如图4所示,还包括制动装置。制动装置包括停止按键7和触发件8。触发件8固定于传动带36上,使得触发件8跟随传动带36移动。停止按键7设置于在触发件8的移动路径上,且按键方向朝向触发件8设置。停止按键7与驱动装置2电连接。
102.请参照图2,本实用新型的实施例二为:
103.一种带归中功能的无人机停机坪,在上述实施例一的基础上,如图2所示,还包括降落定位二维码9。降落定位二维码9设置于停机平台1上的中心位置。并且,降落定位二维码9包括第一二维码91和第二二维码92。第二二维码92嵌套于第一二维码91内。
104.在本实施例中,横向杆4或纵向杆5为无人机接触式充电杆。在本实施例中,无人机通过识别第一二维码91可确定降落位置。在此基础上,无人机继续识别第二二维码92,从而确定自身的朝向,以便于与在横向或纵向的无人机接触式充电杆相配合,实现自动充电。
105.综上所述,本实用新型提供的一种带归中功能的无人机停机坪,在停机平台上水平设置两根横向杆和两根纵向杆并组成口字形结构,利用电机、传动带和不同位置的转动轮相配合,实现单一电机同时两根控制横向杆或两根纵向杆,使得两根横向杆和两根纵向杆各自相互靠近或远离,从而实现归中,利用第一二维码和第二二维码相配合实现更加准确的定位降落,配备有无人机接触式充电杆设计,使得无人机使用起来更加方便。
106.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。