1.本发明涉及无人艇航线规划技术领域,尤其是一种基于粒子群算法和时间势场的无人艇航线规划方法。
背景技术:
2.水面无人艇是一种以自主或遥控方式在水面航行的小型无人驾驶船舶,在军用和民用两个领域都有广泛的应用前景,其研究内容涉及自主航线规划、目标识别、自主避障、抗倾覆等。其中自主航线规划是无人艇任务开展的基础,是无人艇智能程度的重要体现,同时也是各类无人系统研究中的重要课题,是当前的研究热点之一。现有无人艇航线规划的方法主要有:1)基于路线图的规划方法;2)基于网格的搜索/启发式算法;3)群体智能/进化算法。其中第三种方法中常用的粒子群优化算法,由于原理简单、易于实现,自提出就受到广泛关注并被应用于多个领域。
3.然而现有的大多数方法通常将障碍规避和航线长度作为航线规划的评价指标,以得到理论上的最短航线作为目标,但是很少考虑到外部环境及无人艇自身运动能力的约束对航线规划的影响,这导致现有方法无法直接应用到实际的航行场景中,极大限制了算法的应用范围。
技术实现要素:
4.本发明人针对上述问题及技术需求,提出了一种基于粒子群算法和时间势场的无人艇航线规划方法,本发明的技术方案如下:
5.一种基于粒子群算法和时间势场的无人艇航线规划方法,包括如下步骤:
6.获取航线规划区域的电子海图并对其进行栅格化处理;
7.提取电子海图中规划区域的障碍物信息和海流分布信息,生成障碍-海流合成栅格地图;
8.利用快速行进法计算合成栅格地图的时间势场矩阵;
9.以航线在合成栅格地图的时间势场值累积量作为评价函数,结合量子粒子群算法计算从起点到终点的最佳航线。
10.其进一步的技术方案为,提取电子海图中规划区域的障碍物信息和海流分布信息,生成障碍-海流合成栅格地图,包括:
11.提取电子海图中规划区域的障碍物分布信息,根据障碍物位置坐标对栅格进行赋值,得到障碍栅格地图,记为mo;
12.提取电子海图中规划区域的海流分布信息,根据海流所在的位置坐标、速度和方向对栅格进行赋值,得到海流栅格地图,记为mc;
13.将障碍栅格地图和海流栅格地图按权重进行叠加,得到障碍-海流合成栅格地图,记为ms,且ms=αmo (1-α)mc;
14.其中,α为障碍栅格地图的权重系数。
15.其进一步的技术方案为,利用快速行进法计算合成栅格地图的时间势场矩阵,包括:
16.将航线终点作为源点,将合成栅格地图的栅格值作为每个栅格的行进速度,在栅格平面上按照下式执行快速行进法,从源点开始根据每个栅格的行进速度逐步计算到达各个栅格的时间,所构成的矩阵即为时间势场矩阵,记为m
t
:
[0017][0018]
其中,ms(p)表示合成栅格地图在位置p的栅格处的取值,p0为源点;m
t
(p)表示位置p的栅格处的时间势场值,通过上式迭代求解得到。
[0019]
其进一步的技术方案为,以航线在合成栅格地图的时间势场值累积量作为评价函数,结合量子粒子群算法计算从起点到终点的最佳航线,包括:
[0020]
初始化算法参数,包括粒子种群规模m、粒子维数n、搜索空间r及最大迭代次数q;
[0021]
随机生成初始粒子种群s(t)={si(t),i∈m},种群中每个粒子si(t)对应一条候选航线,每条候选航线共由n个路径点组成,t表示当前迭代次数;
[0022]
计算当前粒子种群中每个粒子si(t)={pj(t),j∈n}的时间势场值累积量vi和适应度值fi:
[0023][0024][0025]
其中,pj(t)表示该条候选航线中第j个路径点在合成栅格地图的位置p,m
t
(
·
)表示位置p的栅格处的时间势场值;
[0026]
根据粒子的适应度值更新当前种群中各粒子的历史最优位置;
[0027]
根据量子粒子群算法的粒子演化方程,更新当前种群中各个粒子的下一步的位置,形成新的粒子种群:
[0028]
si(t 1)=si(t)
±
β
·
|ci(t)-si(t)|
·
ln[1/ui(t)];
[0029]
其中,ui(t)表示0~1之间的随机数,参数β为扩张收缩因子,用于控制算法的收敛速度,ci(t)表示当前种群中所有粒子的历史最优位置的中心点;
[0030]
若t<q,则重新执行计算当前粒子种群中每个粒子的时间势场值累积量vi和适应度值fi;否则算法结束,输出当前粒子种群中最优位置的粒子,即为求解得到的从起点到终点的最佳航线。
[0031]
其进一步的技术方案为,获取航线规划区域的电子海图并对其进行栅格化处理,包括:
[0032]
获取航线规划起点和终点所在区域的电子海图,以无人艇x倍船长的间距对电子海图进行等距栅格划分,得到规划区域的栅格地图;其中2≤x≤5,且x取船长尺度的整数倍。
[0033]
其进一步的技术方案为,根据障碍物位置坐标对栅格进行赋值,包括:
[0034]
将障碍物位置坐标对应的栅格赋值为1,其余栅格赋值为0;或者,将障碍物位置坐
标对应的栅格赋值为0,其余栅格赋值为1。
[0035]
其进一步的技术方案为,根据海流所在的位置坐标、速度和方向对栅格进行赋值,包括:
[0036]
根据海流所在的位置坐标找寻对应的栅格区域,将该栅格区域的海流速度取平均值、结合海流方向对该栅格区域进行赋值;对赋值后的栅格地图进行正则化处理,使每个栅格的取值范围在0~1之间。
[0037]
其进一步的技术方案为,从源点开始根据每个栅格的行进速度逐步计算到达各个栅格的时间,包括:
[0038]
记源点为栅格1,与源点相邻的栅格为栅格2,与栅格2相邻的栅格为栅格3,
……
,与栅格q-1相邻的栅格为栅格q,q为合成栅格地图的所有栅格数;
[0039]
从源点开始,以相邻栅格q(q=2,3
……
)的行进速度依次计算从栅格q-1到达栅格q的时间。
[0040]
其进一步的技术方案为,根据粒子的适应度值更新当前种群中各粒子的历史最优位置,包括:
[0041]
对于每个粒子,将其适应度值与其历史最优位置作比较,如果当前粒子的适应度值大于其历史最优位置的适应度值,则将粒子当前位置更新为该粒子的历史最优位置。
[0042]
其进一步的技术方案为,扩张收缩因子取固定值或随着迭代次数线性减小,其中线性减小按照下式进行取值:
[0043][0044]
本发明的有益技术效果是:
[0045]
上述方法针对无人艇自主航行规划的实际需求,通过时间势场对障碍物和海流的影响进行建模,并结合结构简单的量子粒子群算法对最佳航线进行求解,可有效解决常规航线规划方法缺乏考虑环境约束、安全性和实用性差的问题,为无人艇在复杂环境下的实际航行提供支撑。
附图说明
[0046]
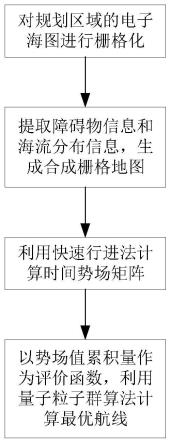
图1是本技术提供的基于粒子群算法和时间势场的无人艇航线规划方法流程图。
[0047]
图2是本技术提供的利用量子粒子群计算最佳航线的方法流程图。
具体实施方式
[0048]
下面结合附图对本发明的具体实施方式做进一步说明。
[0049]
本实施例公开了一种基于粒子群算法和时间势场的无人艇航线规划方法,请参考图1所示的流程图,该方法包括如下步骤:
[0050]
步骤1:获取航线规划区域的电子海图并对其进行栅格化处理。
[0051]
具体地,获取航线规划起点和终点所在区域的电子海图,以无人艇x倍船长的间距对电子海图进行等距栅格划分,得到规划区域的栅格地图;其中2≤x≤5,且x取船长尺度的整数倍。在本实施例中,优选x=2。
[0052]
步骤2:提取电子海图中规划区域的障碍物信息和海流分布信息,生成障碍-海流
合成栅格地图。
[0053]
具体地,提取电子海图中规划区域的障碍物分布信息,根据障碍物位置坐标对栅格进行赋值,即将障碍物位置坐标对应的栅格赋值为1,其余栅格(未被障碍物占据的栅格)赋值为0,赋值后的地图即为障碍栅格地图,记为mo。
[0054]
提取电子海图中规划区域的海流分布信息,根据海流所在的位置坐标、速度和方向对栅格进行赋值,即根据海流所在的位置坐标找寻对应的栅格区域,将该栅格区域的海流速度取平均值、结合海流方向对该栅格区域进行赋值;对赋值后的栅格地图进行正则化处理,使每个栅格的取值范围在0~1之间(包含两个端点值),得到海流栅格地图,记为mc。
[0055]
将障碍栅格地图mo和海流栅格地图mc按权重进行叠加,得到障碍-海流合成栅格地图,记为ms,且ms=αmo (1-α)mc;
[0056]
其中,α为障碍栅格地图的权重系数,是用来描述障碍物对路径规划的影响的因子,其值大于等于0小于等于1。比如α=0.8,表示障碍物的影响占80%,海流的影响占20%。
[0057]
步骤3:利用快速行进法计算合成栅格地图ms的时间势场矩阵。
[0058]
具体地,将航线终点作为源点,将合成栅格地图ms的栅格值作为每个栅格的行进速度,在栅格平面上按照下式执行快速行进法,从源点开始根据每个栅格的行进速度逐步计算到达各个栅格的时间,所构成的矩阵即为时间势场矩阵,记为m
t
:
[0059][0060]
其中,ms(p)表示合成栅格地图在位置p的栅格处的取值,p0为源点;m
t
(p)表示位置p的栅格处的时间势场值,通过上式迭代求解得到。
[0061]
其中,从源点开始根据每个栅格的行进速度逐步计算到达各个栅格的时间,具体包括:记源点为栅格1,与源点相邻的栅格为栅格2,与栅格2相邻的栅格为栅格3,
……
,与栅格q-1相邻的栅格为栅格q,q为合成栅格地图的所有栅格数。
[0062]
从源点开始,以相邻栅格q(q=2,3
……
)的行进速度依次计算从栅格q-1到达栅格q的时间。即第一步:以源点的相邻栅格的行进速度计算从源点到达栅格1的时间,第二步:再以栅格1的相邻栅格的行进速度计算从栅格1到达栅格2的时间,逐步计算直至得到所有栅格的到达时间。
[0063]
步骤4:以航线在合成栅格地图ms的时间势场值累积量作为评价函数,结合量子粒子群算法计算从起点到终点的最佳航线。
[0064]
请参考图2的流程图,具体包括以下分步骤:
[0065]
(1)初始化算法参数,包括粒子种群规模m、粒子维数n、搜索空间r及最大迭代次数q。
[0066]
(2)随机生成初始粒子种群s(t)={si(t),i∈m},种群中每个粒子si(t)对应一条候选航线,每条候选航线共由n个路径点组成,t表示当前迭代次数。
[0067]
(3)计算当前粒子种群中每个粒子si(t)={pj(t),j∈n}的时间势场值累积量vi和适应度值fi:
[0068]
[0069][0070]
其中,pj(t)表示该条候选航线中第j个路径点在合成栅格地图的位置p。
[0071]
(4)根据粒子的适应度值更新当前种群中各粒子的历史最优位置。
[0072]
具体地,对于每个粒子,将其适应度值与其历史最优位置作比较,如果当前粒子的适应度值大于其历史最优位置的适应度值,则将粒子当前位置更新为该粒子的历史最优位置,否则该粒子的历史最优位置不变。
[0073]
(5)根据量子粒子群算法的粒子演化方程,更新当前种群中各个粒子的下一步的位置,形成新的粒子种群:
[0074]
si(t 1)=si(t)
±
β
·
|ci(t)-si(t)|
·
ln[1/ui(t)];
[0075]
其中,ui(t)表示0~1之间的随机数,参数β为扩张收缩因子,用于控制算法的收敛速度,ci(t)表示当前种群中所有粒子的历史最优位置的中心点。
[0076]
其中,扩张收缩因子取固定值或随着迭代次数线性减小,其中线性减小按照下式进行取值:
[0077][0078]
(6)若t<q,则重新执行步骤(3);否则算法结束,输出当前粒子种群中最优位置的粒子,即为求解得到的从起点到终点的最佳航线。
[0079]
在本实施例中,通过将障碍物和海流分布对航线规划的影响融合到势场模型中,并利用量子粒子群算法搜索全局最优航线,可有效解决常规航线规划方法缺乏考虑环境约束、安全性和实用性差的问题,为无人艇在复杂环境下的实际航行提供支撑。
[0080]
以上所述的仅是本技术的优选实施方式,本发明不限于以上实施例。可以理解,本领域技术人员在不脱离本发明的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。