技术特征:
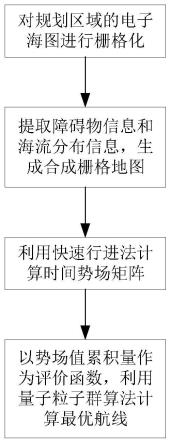
1.一种基于粒子群算法和时间势场的无人艇航线规划方法,其特征在于,所述方法包括:获取航线规划区域的电子海图并对其进行栅格化处理;提取电子海图中规划区域的障碍物信息和海流分布信息,生成障碍-海流合成栅格地图;利用快速行进法计算合成栅格地图的时间势场矩阵;以航线在合成栅格地图的时间势场值累积量作为评价函数,结合量子粒子群算法计算从起点到终点的最佳航线。2.根据权利要求1所述的基于粒子群算法和时间势场的无人艇航线规划方法,其特征在于,所述提取电子海图中规划区域的障碍物信息和海流分布信息,生成障碍-海流合成栅格地图,包括:提取电子海图中规划区域的障碍物分布信息,根据障碍物位置坐标对栅格进行赋值,得到障碍栅格地图,记为m
o
;提取电子海图中规划区域的海流分布信息,根据海流所在的位置坐标、速度和方向对栅格进行赋值,得到海流栅格地图,记为m
c
;将所述障碍栅格地图和所述海流栅格地图按权重进行叠加,得到障碍-海流合成栅格地图,记为m
s
,且m
s
=αm
o
(1-α)m
c
;其中,α为障碍栅格地图的权重系数。3.根据权利要求1所述的基于粒子群算法和时间势场的无人艇航线规划方法,其特征在于,所述利用快速行进法计算合成栅格地图的时间势场矩阵,包括:将航线终点作为源点,将合成栅格地图的栅格值作为每个栅格的行进速度,在栅格平面上按照下式执行快速行进法,从源点开始根据每个栅格的行进速度逐步计算到达各个栅格的时间,所构成的矩阵即为时间势场矩阵,记为m
t
:其中,m
s
(p)表示合成栅格地图在位置p的栅格处的取值,p0为所述源点;m
t
(p)表示位置p的栅格处的时间势场值,通过上式迭代求解得到。4.根据权利要求1所述的基于粒子群算法和时间势场的无人艇航线规划方法,其特征在于,所述以航线在合成栅格地图的时间势场值累积量作为评价函数,结合量子粒子群算法计算从起点到终点的最佳航线,包括:初始化算法参数,包括粒子种群规模m、粒子维数n、搜索空间r及最大迭代次数q;随机生成初始粒子种群s(t)={s
i
(t),i∈m},种群中每个粒子s
i
(t)对应一条候选航线,每条候选航线共由n个路径点组成,t表示当前迭代次数;计算当前粒子种群中每个粒子s
i
(t)={p
j
(t),j∈n}的时间势场值累积量v
i
和适应度值f
i
:
其中,p
j
(t)表示该条候选航线中第j个路径点在合成栅格地图的位置p,m
t
(
·
)表示位置p的栅格处的时间势场值;根据粒子的适应度值更新当前种群中各粒子的历史最优位置;根据量子粒子群算法的粒子演化方程,更新当前种群中各个粒子的下一步的位置,形成新的粒子种群:s
i
(t 1)=s
i
(t)
±
β
·
|c
i
(t)-s
i
(t)|
·
ln[1/u
i
(t)];其中,u
i
(t)表示0~1之间的随机数,参数β为扩张收缩因子,用于控制算法的收敛速度,c
i
(t)表示当前种群中所有粒子的历史最优位置的中心点;若t<q,则重新执行计算当前粒子种群中每个粒子的时间势场值累积量v
i
和适应度值f
i
;否则算法结束,输出当前粒子种群中最优位置的粒子,即为求解得到的从起点到终点的最佳航线。5.根据权利要求1所述的基于粒子群算法和时间势场的无人艇航线规划方法,其特征在于,所述获取航线规划区域的电子海图并对其进行栅格化处理,包括:获取航线规划起点和终点所在区域的电子海图,以无人艇x倍船长的间距对电子海图进行等距栅格划分,得到规划区域的栅格地图;其中2≤x≤5,且x取船长尺度的整数倍。6.根据权利要求2所述的基于粒子群算法和时间势场的无人艇航线规划方法,其特征在于,所述根据障碍物位置坐标对栅格进行赋值,包括:将障碍物位置坐标对应的栅格赋值为1,其余栅格赋值为0;或者,将障碍物位置坐标对应的栅格赋值为0,其余栅格赋值为1。7.根据权利要求2所述的基于粒子群算法和时间势场的无人艇航线规划方法,其特征在于,所述根据海流所在的位置坐标、速度和方向对栅格进行赋值,包括:根据海流所在的位置坐标找寻对应的栅格区域,将该栅格区域的海流速度取平均值、结合海流方向对该栅格区域进行赋值;对赋值后的栅格地图进行正则化处理,使每个栅格的取值范围在0~1之间。8.根据权利要求3所述的基于粒子群算法和时间势场的无人艇航线规划方法,其特征在于,所述从源点开始根据每个栅格的行进速度逐步计算到达各个栅格的时间,包括:记源点为栅格1,与源点相邻的栅格为栅格2,与栅格2相邻的栅格为栅格3,
……
,与栅格q-1相邻的栅格为栅格q,q为合成栅格地图的所有栅格数;从所述源点开始,以相邻栅格q(q=2,3
……
)的行进速度依次计算从栅格q-1到达栅格q的时间。9.根据权利要求4所述的基于粒子群算法和时间势场的无人艇航线规划方法,其特征在于,根据粒子的适应度值更新当前种群中各粒子的历史最优位置,包括:对于每个粒子,将其适应度值与其历史最优位置作比较,如果当前粒子的适应度值大于其历史最优位置的适应度值,则将粒子当前位置更新为该粒子的历史最优位置。10.根据权利要求4所述的基于粒子群算法和时间势场的无人艇航线规划方法,其特征在于,所述扩张收缩因子取固定值或随着迭代次数线性减小,其中线性减小按照下式进行取值:
技术总结
本发明公开了一种基于粒子群算法和时间势场的无人艇航线规划方法,涉及无人艇航线规划技术领域,该方法包括:获取航线规划区域的电子海图并对其进行栅格化处理;提取电子海图中规划区域的障碍物信息和海流分布信息,生成障碍-海流合成栅格地图;利用快速行进法计算合成栅格地图的时间势场矩阵;以航线在合成栅格地图的时间势场值累积量作为评价函数,结合量子粒子群算法计算从起点到终点的最佳航线。本发明将障碍物和海流分布对航线规划的影响融合到势场模型中,并利用量子粒子群算法搜索全局最优航线,可有效解决常规航线规划方法缺乏考虑环境约束、安全性和实用性差的问题,为无人艇在复杂环境下的实际航行提供支撑。无人艇在复杂环境下的实际航行提供支撑。无人艇在复杂环境下的实际航行提供支撑。
技术研发人员:金建海 陈卓 周叶 丁军 张安通 孙泽
受保护的技术使用者:中国船舶科学研究中心
技术研发日:2022.11.17
技术公布日:2023/3/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。