1.本发明涉及刮板输送机故障检测技术领域,具体提供一种刮板输送机断链故障的视觉检测方法及装置。
背景技术:
2.现有刮板输送机是一种用刮板链牵引,在槽内运送散料的输送机。在当前采煤工作面内,刮板输送机的作用不仅是运送煤和物料,而且还是采煤机的运行轨道,因此它成为现代化采煤工艺中不可缺少的主要设备。刮板输送机能保持连续运转,生产就能正常进行。否则,整个采煤工作面就会呈现停产状态,使整个生产中断。刮板输送机常见的故障是断链故障。因此,对于断链故障的及时检测是保证生产任务的重要举措。
3.常见的刮板输送机断链故障检测方法按照是否接触大致可以分为两类:接触式和非接触式。常见的接触式检测方法有链条张力检测法、舌板式检测方法和链轮应力检测法,常见的非接触式检测方法有链轮转速检测法和霍尔传感器检测法。
4.对于接触式的检测方法,由于磨损和煤矸的碰砸等恶劣情况,这类传感器普遍存在易磨损、灵敏度低、抗恶劣环境能力差的缺陷,其可靠性比较差。对于非接触式的检测方法,链轮转速检测法要实时测量两个链轮的转速,通过差值进行判断,其灵敏度较低,并不能检测轻微的链条故障,而且对于前后双驱动式刮板输送机缺乏适用性;霍尔传感器检测法,传感器要保证不能影响煤、刮板和采煤机的通过,否则传感器容易被撞坏或磨损,因而安装上不太方便,结构也较为复杂。
5.相应地,本领域需要一种新的刮板输送机断链故障的检测方法来解决上述问题。
技术实现要素:
6.本发明旨在解决上述技术问题,即解决现有的断链故障检测方法存在传感器易磨损、灵敏度低、抗恶劣环境能力差的问题。为此目的,本发明提供了一种刮板输送机断链故障的视觉检测方法,该视觉检测方法包括以下步骤:
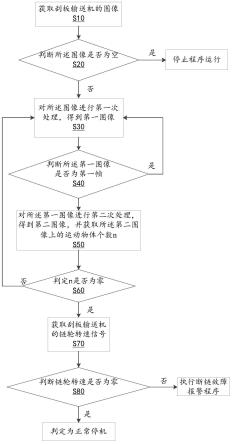
7.步骤s10:获取刮板输送机的图像;
8.步骤s20:判断所述图像是否为空,如果是,则停止程序运行,如果否,则执行步骤s30;
9.步骤s30:对所述图像进行第一次处理,得到第一图像;
10.步骤s40、判断所述第一图像是否为第一帧,如果是,则执行步骤s30,如果否,则执行步骤s50;
11.步骤s50、对所述第一图像进行第二次处理,得到第二图像,并获取所述第二图像上的运动物体个数n;
12.步骤s60:判断n是否为零,是,则执行步骤s70,否,则执行步骤s30;
13.步骤s70:获取刮板输送机的链轮转速信号;
14.步骤s80:判断链轮是否运转,是,则判定为正常停机,否,则执行断链故障报警程
序。
15.在上述视觉检测方法的具体实施方式中,所述步骤s10中,“第一次处理”包括对图像依次进行灰度化处理、归一化处理和直方图均衡化处理,处理后的所述第一图像具有均匀灰度概率密度分布的特征。
16.在上述视觉检测方法的具体实施方式中,所述归一化处理和直方图均衡化处理的计算公式如下:
[0017][0018][0019]
上式中,s表示直方图均衡化处理后的图像像素值,r表示归一化处理后的图像像素值,t(r)表示变换函数,pr(r)表示归一化处理后的图像像素值r的概率密度函数。
[0020]
在上述视觉检测方法的具体实施方式中,所述步骤s10中,先获取刮板输送机的视频信息,再对视频信息进行处理以得到实时图像。
[0021]
在上述视觉检测方法的具体实施方式中,所述步骤s30中,“第二次处理”包括以下步骤:
[0022]
步骤s31:进行运动目标检测,获得差分图像或其他运动目标信息;
[0023]
步骤s32:将差异部分同掩膜求交,得到图像中刮板输送机的部分,为第一中间图像;
[0024]
步骤s33、对第一中间图像进行二值化处理,得到第二中间图像;
[0025]
步骤s34、对第二中间图像进行形态学处理,得到第二图像。
[0026]
在上述视觉检测方法的具体实施方式中,所述二值化处理的方法为:选取合适的阈值t,使用以下公式对每个像素点进行处理,对灰度图像中像素值大于或等于阈值的像素点,用255覆盖,该像素点的二值化结果是前景;对灰度图像中像素值小于阈值的像素点,用0覆盖,该像素点的二值化结果是背景,获得二值化图像:
[0027][0028]
上式中,p(x,y)表示灰度图像二值化处理后在像素点(x,y)处的像素值,gray(x,y)表示灰度图像在像素点(x,y)处的像素值。
[0029]
在上述视觉检测方法的具体实施方式中,所述形态学处理的方法为:对所述第二中间图像依次进行腐蚀运算和膨胀运算。
[0030]
在上述视觉检测方法的具体实施方式中,所述运动目标检测采用帧间差分法、光流法或背景减除法。
[0031]
在上述视觉检测方法的具体实施方式中,所述步骤s20中,获取掩膜可以通过手动提取实现,也可以通过图像分割或目标检测方式自动提取。
[0032]
在采用上述技术方案的情况下,本发明提供的视觉检测方法克服了现有的断链故障检测方法存在传感器易磨损、灵敏度低、抗恶劣环境能力差的问题。具体地,获取刮板输送机的图像并进行处理,先判断处理后的图像上的运动物体是否为零,再从变电变频器、真
空电磁起动器或其他链轮转速监测装置处获得刮板输送机的链轮转速信号,判断其是否停机,然后综合两个判断结果确定刮板输送机是否存在断链故障。
[0033]
本方法仅需要获取刮板输送机的动态图像和链轮的转速信息就能确定刮板输送机是否仅处于断链故障状态,图像处理的相关设备可以设置在相对安全的位置,提高了图像处理设备的稳定性,进而使整个系统具有较强的鲁棒性。
[0034]
此外,本方法提高了刮板输送机的智能化水平,对保障工作面煤炭运输的连续性,提高生产效率,降低工人劳动强度,最大限度地减少煤矿企业由于刮板输送机链条发生故障后所带来的影响和损失,具有重要的工程应用价值。
[0035]
本发明还提供一种刮板输送机断链故障的视觉检测装置,所述视觉检测装置包括控制器,所述控制器配置成能执行上述实施例中任一项所述视觉检测方法。
附图说明
[0036]
下面结合附图来描述本发明的优选实施方式,附图中:
[0037]
图1是本发明提供的视觉检测方法的主要步骤流程图;
[0038]
图2是本发明提供的视觉检测方法中的第二次处理的步骤流程图;
[0039]
图3是本发明提供的视觉检测装置的示意图;
[0040]
图4是本发明提供的算法移植到嵌入式平台内的步骤流程图。
具体实施方式
[0041]
需要说明的是,在本发明的描述中,序数词“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0042]
如图1所示,本发明提出了一种刮板输送机断链故障的视觉检测方法,该视觉检测方法包括以下步骤:
[0043]
步骤s10:获取刮板输送机的图像;
[0044]
步骤s20:判断所述图像是否为空,如果是,则停止程序运行,如果否,则执行步骤s30;
[0045]
步骤s30:对所述图像进行第一次处理,得到第一图像;
[0046]
步骤s40:判断所述第一图像是否为第一帧,如果是,则执行步骤s30,如果否,则执行步骤s50;
[0047]
步骤s50:对所述第一图像进行第二次处理,得到第二图像,并获取所述第二图像上的运动物体个数n;
[0048]
步骤s60:判断n是否为零,如果是,则执行步骤s70,如果否,则执行步骤s30;
[0049]
步骤s70:获取刮板输送机的链轮转速信号;
[0050]
步骤s80:判断链轮是否运转,如果是,则判定为正常停机,如果否,则执行断链故障报警程序。
[0051]
本发明提供的视觉检测方法克服了现有方法中传感器磨损、灵敏度低、抗恶劣环境能力差等问题。具体为,获取刮板输送机的图像并进行处理,先判断处理后的图像上的运动物体是否为零,再从变电变频器、真空电磁起动器或其他链轮转速监测装置处获得刮板输送机的链轮转速信号,判断其是否停机,然后综合两个判断结果确定刮板输送机是否存
在断链故障。
[0052]
本方法仅需要获取刮板输送机的动态图像和链轮的转速信息就能确定刮板输送机是否仅处于断链故障状态,图像处理的相关设备可以设置在相对安全的位置,提高了图像处理设备的稳定性,进而使整个系统具有较强的鲁棒性。
[0053]
此外,本方法提高了刮板输送机的智能化水平,对保障工作面煤炭运输的连续性,提高生产效率,降低工人劳动强度,最大限度的减少煤矿企业由于刮板输送机链条发生故障后所带来的影响和损失,具有重要的工程应用价值。
[0054]
进一步,所述步骤s10中,“第一次处理”包括对图像依次进行灰度化处理、归一化处理和直方图均衡化处理,处理后的所述第一图像具有均匀灰度概率密度分布的特征。
[0055]
本实施例中,对图像灰度化处理,可以降低储存数据空间的大小,并且同时还能减少需要进行运算的数据量,提高了后续图像处理的速度,归一化处理和直方图均衡化处理都是为了增强图像中目标的轮廓,以提高图像的清晰度和亮度,便于图像中的目标物体的特征更加明显,增强后续的检测效果。
[0056]
进一步,所述归一化处理的计算公式如下:
[0057][0058]
上式中,l-1表示灰度值,原图像像素值属于(0,l-1),pr(r)表示归一化处理后的图像像素值的概率密度函数;
[0059]
归一化处理后的图像像素值r的概率密度函数和直方图均衡化处理后的图像像素值s的概率密度函数之间的关系为:
[0060]
ps(s)ds=pr(r)dr[0061]
两边同时积分得到变换函数:
[0062]
上式中,s表示直方图均衡化处理后的图像像素值,r表示归一化处理后的图像像素值,t(r)表示变换函数,pr(r)表示归一化处理后的图像像素值r的概率密度函数。
[0063]
进一步,所述步骤s10中,先获取刮板输送机的视频信息,再对视频信息进行处理以得到实时图像。
[0064]
进一步,如图2所示,所述步骤s30中,“第二次处理”包括以下步骤:
[0065]
步骤s31:进行运动目标检测,获得差分图像或其他运动目标信息;
[0066]
步骤s32:将差异部分同掩膜求交,得到图像中刮板输送机的部分,为第一中间图像;
[0067]
步骤s33:对第一中间图像进行二值化处理,得到第二中间图像;
[0068]
步骤s34:对第二中间图像进行形态学处理,得到所述第二图像。
[0069]
本实施例中,为了减少多余的计算和多余背景的干扰,防止煤炭、矸石、行人和其他设备或物体的运动对刮板输送机断链故障造成误判,提高算法运行速度和识别精度,将刮板输送机在图像中的具体位置设置为掩膜,用图像和掩膜求交集,获得差异图像中刮板输送机的部分。对图像进行二值化处理,可以将整个图像呈现出明显的黑白效果,进而可以大大降低图像的数据量,最终能凸显出目标的轮廓。形态学处理可以减少图像中的干扰,提
高目标检测的精度。
[0070]
进一步,所述二值化处理的方法为:选取合适的阈值t,使用以下公式对每个像素点进行处理,对灰度图像中像素值大于或等于阈值的像素点,用255覆盖,该像素点的二值化结果是前景;对灰度图像中像素值小于阈值的像素点,用0覆盖,该像素点的二值化结果是背景,获得二值化图像:
[0071][0072]
式中,p(x,y)表示灰度图像二值化处理后在像素点(x,y)处的像素值,gray(x,y)表示灰度图像在像素点(x,y)处的像素值。
[0073]
进一步,所述形态学处理的方法为:对所述第二中间图像依次进行腐蚀运算和膨胀运算。
[0074]
本实施例中,腐蚀运算可以去除图像中由于光照变化等带来的干扰信息,再对图像进行膨胀运算,消除腐蚀操作对目标轮廓的过度侵蚀,以保证提取目标的精度。
[0075]
进一步,所述运动目标检测可以采用帧间差分法、光流法或背景减除法。
[0076]
进一步,所述步骤s20中,获取掩膜可以通过手动提取实现,也可以通过图像分割或目标检测方式自动提取。
[0077]
本实施例中,由于本方法确定刮板链上煤矿石是否处于运动状态是基于煤矿石不同时刻在图片上的位置,因此,需要判断开机后接收到的第一图像是否为第一帧图像,如果是第一帧图像,则只需要对第一图像进行相应的处理即可;如果第一图像不是第一帧图像,不仅需要对图像上的目标进行处理,还需要与前面一帧的图像进行比对,以判断目标在图片上的位置是否有移动。
[0078]
本发明还提供一种刮板输送机断链故障的视觉检测装置,该视觉检测装置包括控制器,该控制器配置成能执行上述实施例中任一项提供的视觉检测方法的程序。进一步,装置由井下和井上两部分组成,井下部分包括工业相机、镜头和嵌入式处理平台,所述镜头设于所述工业相机上,所述工业相机与所述嵌入式处理平台相连接。井上主要由工业计算机构成,考虑到嵌入式处理平台处理数据能力有限,故在井上部分建立了处理中心,可直接对工业相机采集的视频信号进行处理。
[0079]
本实施例中,将工业摄像机、镜头等布置在刮板输送机的机头部、中间部、机尾部等位置,获得刮板输送机运行的实时视频信息,将视频信息传输到嵌入式平台,获取刮板输送机的实时图像数据。。
[0080]
如图4所示,本发明还提供将算法移植到树莓派这一嵌入式处理平台的步骤:
[0081]
步骤s41:将系统烧录到嵌入式处理平台,连接显示屏启动系统;
[0082]
步骤s42:进入树莓派开启ssh服务,连接wifi并获得树莓派的ip地址,借助相应的工具软件,远程登录嵌入式处理平台,将算法文件移植到嵌入式处理平台中;
[0083]
步骤s43:根据相机型号,与相机作联合调试,判断是否正常工作达到预期目标;
[0084]
步骤s44:设置开机自启动,以便于用户直接控制。
[0085]
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征作出等同的更改或替换,这些
更改或替换之后的技术方案都将落入本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。