技术特征:
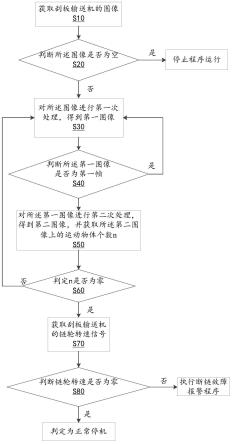
1.一种刮板输送机断链故障的视觉检测方法,其特征在于,所述视觉检测方法包括以下步骤:步骤s10:获取刮板输送机的图像;步骤s20:判断所述图像是否为空,如果是,则停止程序运行,如果否,则执行步骤s30;步骤s30:对所述图像进行第一次处理,得到第一图像;步骤s40:判断所述第一图像是否为第一帧,如果是,则执行步骤s30,如果否,则执行步骤s50;步骤s50:对所述第一图像进行第二次处理,得到第二图像,并获取所述第二图像上的运动物体个数n;步骤s60:判断n是否为零,如果是,则执行步骤s70,如果否,则执行步骤s30;步骤s70:获取刮板输送机的链轮转速信号;步骤s80:判断链轮转速是否为零,如果是,则判定为正常停机,如果否,则执行断链故障报警程序。2.根据权利要求1所述的视觉检测方法,其特征在于,所述步骤s10中,“第一次处理”包括对图像依次进行灰度化处理、归一化处理和直方图均衡化处理,处理后的所述第一图像具有均匀灰度概率密度分布的特征。3.根据权利要求2所述的视觉检测方法,其特征在于,所述归一化处理和直方图均衡化处理的计算公式如下:s=t(r)=∫
0r
p
r
(r)a
r
上式中,s表示直方图均衡化处理后的图像像素值,r表示归一化处理后的图像像素值,t(r)表示变换函数,p
r
(r)表示归一化处理后的图像像素值r的概率密度函数。4.根据权利要求1所述的视觉检测方法,其特征在于,所述步骤s10中,先获取刮板输送机的视频信息,再对视频信息进行处理以得到实时图像。5.根据权利要求1所述的视觉检测方法,其特征在于,所述步骤s30中,“第二次处理”包括以下步骤:步骤s31:进行运动目标检测,获得差分图像或其他运动目标信息;步骤s32:将差异部分同掩膜求交,得到图像中刮板输送机的部分,为第一中间图像;步骤s33:对第一中间图像进行二值化处理,得到第二中间图像;步骤s34:对第二中间图像进行形态学处理,得到所述第二图像。6.根据权利要求5所述的视觉检测方法,其特征在于,所述二值化处理的方法为:选取合适的阈值t,使用以下公式对每个像素点进行处理;对灰度图像中像素值大于或等于阈值t的像素点,用225覆盖,该像素点的二值化结果是前景;对灰度图像中像素值小于阈值t的像素点,用0覆盖,该像素点的二值化结果是背景,获得二值化图像:上式中,p(x,y)表示灰度图像二值化处理后在像素点(x,y)处的像素值,gray(x,y)表
示灰度图像在像素点(x,y)处的像素值。7.根据权利要求5所述的视觉检测方法,其特征在于,所述形态学处理的方法为:对所述第二中间图像依次进行腐蚀运算和膨胀运算。8.根据权利要求5所述的视觉检测方法,其特征在于,所述运动目标检测采用帧间差分法、光流法或背景减除法。9.根据权利要求5所述的视觉检测方法,其特征在于,所述步骤s20中,获取掩膜可以通过手动提取实现,也可以通过图像分割或目标检测方式自动提取。10.一种刮板输送机断链故障的视觉检测装置,所述视觉检测装置包括控制器,其特征在于,所述控制器配置成能执行权利要求1-9中任一项所述的视觉检测方法。
技术总结
本发明涉及刮板输送机故障检测技术领域,具体提供刮板输送机断链故障的视觉检测方法及装置,旨在解决现有的断链故障检测方法存在传感器易磨损、灵敏度低、抗恶劣环境能力差的问题。为此目的,本发明提供的视觉检测方法包括以下:S10:获取刮板输送机的图像;S20:判断图像是否为空,是,则停止程序运行,否,则执行S30;S30:对图像进行第一次处理,得到第一图像;S40:判断第一图像是否为第一帧,是,则执行S30,否,则执行S50;S50:对第一图像进行第二次处理,得到第二图像,并获取运动物体个数n;S60:判断n是否为零,是,则执行S70,否,则执行S30;S70:获取刮板输送机的链轮转速信号;S80:判断链轮转速是否为零,是,则判定停机,否,则断链故障报警。断链故障报警。断链故障报警。
技术研发人员:汪爱明 聂帅 刘纪伟 孟国营 程晓涵 杨杰
受保护的技术使用者:中国矿业大学(北京)
技术研发日:2022.11.18
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。