1.本发明通常涉及对机械部件的无损检测。本技术特别适用于多晶材料制成的机械部件。
背景技术:
2.飞行器发动机的大量关键部件都是由钛合金制成的。这些部件是由称为“坯段”的圆柱体锻造而成的。可选地,它们经过预机械加工或机械加工。
3.钛,像某些合金一样,是一种多晶材料,也就是说,它是由晶粒组成的,晶粒在所经历的各种锻造步骤中容易变形。部件的成形会引起其宏观结构的变形,并可能导致部件中存在缺陷。
4.纤维结构平面对应于部件在成形过程中所经历的变形的图谱。可通过软件对部件的任意点处的晶粒的变形进行数字化预测,但结果并不完全可靠。例如,由于坯段的制造过程中的误差或部件的锻造过程中的漂移,有时部件的实际纤维结构与理论纤维结构不一致。
5.为了在组装在反应器中前确保这些部件的完整性并测试确定它们没有任何缺陷(如裂纹、气孔或夹杂物),通过超声波对这些部件进行无损测试,以检测任何可能的缺陷迹象。这些测试在坯段上进行,以及在锻造后所形成的部件上进行。它们是使用一个或多个压电换能器进行的。已知使用的是单元件压电探头或(环形或线性)多元件探头。
6.在设想部件的纤维结构平面为已知的情况下,设计了部件的超声波测试。
7.已知,当入射超声波在垂直于纤维结构的方向上传播时,即在垂直于构成部件的多晶材料的晶粒的优选的伸长方向上传播时,对于缺陷检测而言是最佳的。因此,声射束的方向是由设想的纤维结构平面确定的:这是设计测试平面时考虑的一个重要因素。因此,确定部件的纤维结构对于确保最佳的可靠性和安全性至关重要。
8.然而,正如已经发现的,可能的情况是,部件的实际纤维结构与测试设计所使用的理论纤维结构不一致。这是一个问题,因为所进行的测试不适合该部件,并且在最极端的情况下这可能会对缺陷的检测产生不利的影响。
9.此外,纤维结构的知识也提供了关于部件的机械强度的信息。
10.wo 2018/138430提出了一种部件的超声波测试,以确定位于部件中的伸长的微结构的伸长方向。为此,线性换能器通过包括例如机械臂或可移动支架的运动装置而平移地和旋转地移动。对测量结果进行实空间中的数学处理。
11.us 6 387 197涉及一种处理钛以形成钛制品的方法,所述钛制品在超声检查期间减小了产生的超声噪声。
12.粗颗粒材料通常难以进行超声评估。困难的出现是因为用于超声检查的声波可被部分地从颗粒反射,并表现出“结构噪声”,或颗粒噪声。产生的结构噪声会隐藏材料中的缺陷,因此是不希望出现的。
13.us 5 471 878涉及用于在物体的超声检查期间抑制颗粒噪声的方法,从而实现高
的缺陷检出率和低的缺陷误指示率。
14.wo 2010/142927公开了用于表征介质的超声方法和装置。特别地,其涉及无损检测机械部件(例如人或动物的骨骼)的状态。该装置使用一维探头,其换能器不能以不同的激励角度发射和接收信号。“轨迹”被确定,所述轨迹被定义为高能量线,每条高能量线反映振动模式,并形成传播介质的组件特性。它们对应于频率传播速度参考系中的能量极大值。因此,这些轨迹与机械部件的纤维结构的三维取向无关。
15.目前还没有一种有效的工业性无损方法来确定多晶材料制成的部件的纤维结构取向。
技术实现要素:
16.本发明旨在通过提供一种用于多晶材料制成的机械部件的无损检测装置来解决现有技术中存在的问题,所述无损检测装置包括:
[0017]-超声探头,所述超声探头包括换能器的二维阵列,所述换能器能够以不同激励角度发射和接收信号,以及
[0018]-处理模块,所述处理模块适于控制处于发射和接收中的换能器,以及处理所述换能器接收到的信号,以便以所述探头的发射和接收波矢量构成的平面波的两个平面来表达所述换能器接收到的信号,并由此推导出代表所述机械部件的纤维结构的三维取向的信息。
[0019]
由于本发明,能够在不旋转探头的情况下发射出具有不同角度的超声波束。因此,在单次采集中并且在没有用户干预的情况下,能够采集足以进行合适的处理的一组超声信号。于是,该处理使得能够构造虚拟波矢量,从而使得能够推导出有关纤维结构的局部和三维取向的信息。
[0020]
本发明使得能够在与工业系统兼容的同时获得测量的更大的鲁棒性。
[0021]
根据优选特征,处理模块适于构造三维反射矩阵。
[0022]
根据优选特征,所述处理模块适于以平面波基表达所述换能器接收的信号。
[0023]
根据优选特征,所述处理模块适于通过分别与探头发射和接收的平面波相关联的波矢量的总和以及差来构造平面波的两个平面。
[0024]
根据优选特征,所述处理模块适于:通过确定与以由所述探头的发射和接收波矢量构造的平面波的两个平面表达的接收信号的强度极大值相关联的方向,来推导出表示所述机械部件的纤维结构的三维取向的信息。
[0025]
本发明还涉及一种用于无损检测多晶材料制成的机械部件的方法,该方法在上述装置中实现,其特征在于,所述方法包括:控制处于发射和接收中的所述换能器的步骤,处理所述换能器接收的信号的步骤,以由所述探头的发射和接收波矢量构造的平面波的两个平面来表达所述换能器接收的信号的步骤,以及推导出表示所述机械部件的纤维结构的三维取向的信息的步骤。
[0026]
该方法具有类似于前面提出的优点。
[0027]
在特定实施例中,根据本发明的方法的步骤通过计算机程序指令来实现。
[0028]
因此,本发明还涉及信息介质上的计算机程序,该程序能够在计算机中实现,该程序包括适于实现上述方法的步骤的指令。
[0029]
该程序可以使用任何编程语言,并且可以呈源代码、目标代码或源代码和目标代码之间的中间代码的形式,例如呈部分编译的形式,或任何其他希望的形式。
[0030]
本发明还涉及一种计算机可读的信息介质,其包括适于实现上述的方法的步骤的计算机程序指令。
[0031]
信息介质可以是能够存储程序的任何实体或装置。例如,介质可以包括存储介质,例如rom,例如cd rom或微电子电路rom,或者磁记录介质,例如软盘或硬盘。
[0032]
另一方面,信息介质可以是诸如电信号或光信号的可传输介质,其可以通过电缆或光缆、无线电或其他方式传送。根据本发明的程序尤其可以从因特网类型的网络下载。
[0033]
替代性地,信息介质可以是其中包含有程序的集成电路,该电路适于执行根据本发明的方法或在执行根据本发明的方法时使用。
附图说明
[0034]
在阅读参照附图描述的通过非限制性示例给出的优选实施例的以下描述时,其他特征和优点将更为明显,在附图中:
[0035]
[图1]示出了根据本发明的一个实施例的在检测机械部件时的无损检测装置,
[0036]
[图2]示出了根据本发明的一个实施例的在图1的装置中应用的超声波探头的仰视图,
[0037]
[图3]示出了根据本发明的一个实施例的用于对机械部件进行无损检测的方法,
[0038]
[图4]是根据本发明的一个实施例的与由超声波探头发射和接收的平面波相关联的波矢量的示意图。
[0039]
不同附图的相同、相似或等效部件带有相同的附图标记,以使得有助于从一幅附图过渡到其它附图。
[0040]
附图中示出的不同部分不一定按相同比例示出,以便使附图更易读。
[0041]
各种不同的可能性(变形和实施例)必须被理解为不相互排斥并且能够相互结合。
具体实施方式
[0042]
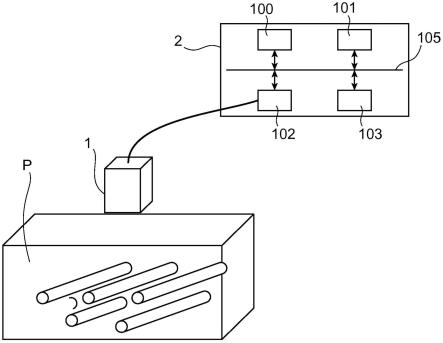
图1示出了由多晶材料(例如钛)制成的机械部件p。部件p是锻造的,并且可选地,经过预机械加工和/或机械加工。部件p包括内纤维结构,内纤维结构以圆柱体示意性示出。
[0043]
部件p必须以无损的方式进行检测,以验证它没有任何缺陷(如裂纹、气孔或夹杂物)。这种检测可以使用超声技术进行。为此,用户需要知道部件的纤维结构方向,即,材料晶粒伸长的优选的局部方向。事实上,众所周知,当入射超声波在垂直于纤维结构的方向上传播时,对于缺陷检测而言是最佳的。
[0044]
将描述的无损检测装置能够确定部件p的纤维结构的方向。
[0045]
根据图1所示的优选实施例,用于对多晶材料制成的机械部件进行无损检测的装置包括超声探头1,所述超声探头包括换能器的二维网络,所述换能器能够按照不同传播角来发射和接收信号。
[0046]
图2示出了超声探头1的仰视图。换能器为矩形的,矩形的沿两个正交轴x和y限定的两个维度的尺寸a
x
和ay沿轴x和y分布。换能器相互独立,并且能够进行发射和接收测试。应当注意,其他的换能器几何形状也是可能的,并且这些换能器的布置可以是规则的或任
意的。
[0047]
该无损检测装置还包括连接到超声探头1的处理模块2。处理模块2适于在发射和接收时测试换能器,并适于处理由换能器接收的信号,如下所述。
[0048]
处理模块2被实施为计算机。
[0049]
特别地,计算机5包括处理器100、存储器101、输入接口102和输出接口103。
[0050]
这些不同的元件通常通过总线105连接。
[0051]
处理器100执行实现根据本发明的方法的计算机程序。这些处理操作以计算机程序代码指令的形式执行,该计算机程序代码指令在被处理器100执行之前由存储器101存储。
[0052]
输出接口103连接到探头1,并传送代表用于探头1的换能器的控制指令的数据。
[0053]
输入接口102连接到探头1,并用于接收代表由换能器接收的信号的数据。
[0054]
下述的用于检测该部件的两种配置是可能的:
[0055]-在第一种配置中,探头直接定位在待检测的部件上(称为“接触”的配置),超声传输于是通过偶连凝胶或水确保;
[0056]-在第二种配置中,待检测的部件和探头被浸入水中,探头定位成面向待检测的部件,超声的正确传输于是通过水来确保。
[0057]
图3的无损检测方法示出了图1的无损检测装置的操作的实施例。该方法包括步骤e1至e8。
[0058]
假定部件p已经以这种方式被布置成待进行测试。
[0059]
步骤e1是超声信号发射,该超声信号发射由探头1控制。为此,全部或部分的探头被用来在与探头的平面相关的实空间中发射一系列信号。发射例如由换能器进行。换能器的每一个基本射束(elementary shot)都发射圆波。获得被称为“实空间”矩阵的矩阵需要所有的基本发射(也就是每个换能器一个基本发射)。
[0060]
如果信噪比不足,超声信号的发射也可在其他空间进行,例如一系列具有限定的波向量k
发射
的平面波,用于探测不同的角度。在这种情况下,所有的换能器都被使用,因此总的辐射能量更高。
[0061]
平面波射束使用所有的换能器,并以精确和限定的角度发送平面波。直接在平面波空间中获得反射矩阵的角度,需要一组对应于反射矩阵的每个角度的射束序列。
[0062]
下一步骤e2是由探头1接收超声信号。
[0063]
对于发射,在接收方面存在不同的可能性。第一种可能是对接收到的超声信号应用延迟律,以便以平面波基(plane-wave base)来表达它们。在这种情况下,超声信号的接收是以平面波基进行的。
[0064]
另一种可能是在实空间中执行接收。在这种情况下,如下所述,将对所接收的超声信号应用双重空间傅里叶变换(double spatial fourier transform),以便执行基变化(base change)以返回到平面波基。
[0065]
在下一步骤e3中,探头1接收的所有信号被重新排列成反射矩阵k,以便能够对这些信号执行高级信号处理。
[0066]
步骤e3是构造反射矩阵k,反射矩阵包括由探头1接收的信号,以下列基中的一个基来表达:
[0067]
a.正则基(canonical base)或基本基:探头的元件独立地逐一发射或接收背向散射信号。
[0068]
b.平面波基:探头的元件以一定的延迟发射或接收背向散射信号,以产生选定传播方向k
发射
的平面波。
[0069]
c.在发射和接收中上述两种基的结合。
[0070]
反射矩阵k由3个维度组成:发射中选择的基,接收中选择的基,和时间。
[0071]
发射中选择的基是正则基u
发射
或平面波基k
发射
。接收中选择的基是正则基u
接收
或平面波基k
接收
。
[0072]
探头1是矩阵(2d),每个维度u
发射
,u
接收
,k
发射
,k
接收
是具有标记为x和y的两个分量的向量。
[0073]
图4说明了分别与探头1发射和接收的平面波相关联的波矢量k
发射
和k
接收
。
[0074]
接下来的步骤e4是对所获取的每个基本信号应用时间傅立叶变换,以便根据反射矩阵k的最后一维度在频率空间中表示这些信号。值得回顾的是,反射矩阵k包括两个空间维度和一个时间维度。
[0075]
步骤e4的结果是反射矩阵kf,它的第三维度是频率。
[0076]
可以考虑单个频率,例如换能器的公称频率。这限制了计算时间。
[0077]
也可以考虑带宽,例如换能器的带宽,于是在所考虑的带宽上对信号进行平均,以提高信噪比。
[0078]
在所有情况中,计算都是一个频率一个频率地进行。
[0079]
接下来的骤e5是确定是否以正则基进行了超声信号的发射或接收,或者是否以正则基进行了超声信号的发射和接收。当在这种情况下,在反射矩阵的相关维度上对接收信号进行空间傅里叶变换,以便以平面波基来表达接收的信号。
[0080]
从正则基到平面波基的转移矩阵如下:p(u,k)=exp(
±
i k.u),这个符号取决于针对傅里叶变换选择的约定,u表示正则基,k表示平面波基,“.”表示标量积。
[0081]
如果发射和接收是以平面波基进行的,则反射矩阵在这一步不被改变。
[0082]
反射矩阵有3个维度:发射中的平面波基k
发射
=(k
x,发射
,k
y,发射
),接收中的平面波基k
接收
=(k
x,接收
,k
y,接收
)和所考虑的一个或多个频率f。
[0083]
在下一步骤e6中,通过探头的波矢量k
接收
和k
发射
的总和以及差来构造两个虚矩阵:
[0084]
k1(k
x,发射
k
x,接收
;k
y,发射
k
y,接收
;k
x,发射
;k
y,发射
;f),和
[0085]
k2(k
x,接收-k
x,发射
;k
y,接收-k
y,发射
;k
x,发射
;k
y,发射
;f)。
[0086]
从物理的角度来看,这两个矩阵包含了局部纤维结构方向的信息。
[0087]
在下一步骤e7中,根据第三维度、第四维度和第五维度k
x,发射
、k
y,发射
和频率对矩阵k1和k2进行平均。这个操作包括通过改变矩阵元素的第三维度、第四维度和第五维度的指数(而其他维度的指数保持不变)来计算矩阵的元素的平均值。
[0088]
应当注意,对于频率维度,只有在考虑带宽的情况下才执行平均计算。在这种情况下,信息在带宽上被平均。如果只考虑一个频率,则不存在根据频率维度计算平均值。
[0089]
这一步骤得到以下两个二维矩阵:k1m(k
x,发射
k
x,接收
;k
y,发射
k
y,接收
)以及k2m(k
x,接收-k
x,发射
;k
y,接收-k
y,发射
)。
[0090]
被所述部件p反向散射的信号以由所述探头的所述波矢量k
发射
和k
接收
构成的平面波
“k接收
k
发射”和“k
接收-k
发射”的平面来表达。平面波“k
接收
k
发射”和“k
接收-k
发射”的这些平面携带了用来确定纤维结构的方向的可用信息。
[0091]
在下一个步骤e8中,分析矩阵k1m和k2m,以推导出纤维的三维(3d)的结构方向。
[0092]
步骤e8是根据与包含在矩阵k1m和k2m中的信号的强度最大值相关联的方向来确定在所考虑的每个点处的纤维结构取向。
[0093]
最大强度的点是矩阵k1m和k2m中的最大值的点。当部件具有各向异性纤维结构时,最大强度的点遵循提供关于纤维结构的方向的信息的优选方向。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。