1.本发明涉及显示装置及其驱动方法。
背景技术:
2.随着信息化技术的发展,作为使用者与信息间的连接媒介的显示装置的重要性日益显著。响应于此,如液晶显示装置(liquid crystal display device)、有机发光显示装置(organic light emitting display device)等这样的显示装置的使用正在增加。
3.在显示装置中,由于滞后(hysteresis)现象,存在无法以目标亮度显示图像的情况。正在研究对这种现象的各种应对方案。
技术实现要素:
4.要解决的技术课题在于,提供一种可以以最小限度使用存储器容量的同时解决瞬间残像问题的显示装置及其驱动方法。
5.本发明的一实施例涉及的显示装置可以包括:残像补偿部,在输入灰度与静止图像对应的情况下,将权重值适用于所述输入灰度来生成输出灰度;以及像素,基于所述输出灰度来显示图像,所述残像补偿部可以对于第一组的输入灰度适用具有大于1的初始值的第一权重值,随着时间的流逝,使所述第一权重值收敛于1,并且所述残像补偿部可以对于第二组的输入灰度适用具有小于1的初始值的第二权重值,随着时间的流逝,使所述第二权重值收敛于1。
6.可以是,所述第一组的输入灰度的代表值小于先前帧的对应的代表值,所述第二组的输入灰度的代表值大于先前帧的对应的代表值。
7.可以是,所述第一组的输入灰度的代表值和所述先前帧的对应的代表值的差异越大,所述第一权重值的初始值越大,所述第二组的输入灰度的代表值和所述先前帧的对应的代表值的差异越大,所述第二权重值的初始值越小。
8.可以是,所述残像补偿部包括:查找表,预先记录所述第一权重值的所述初始值和所述第二权重值的所述初始值。
9.可以是,所述残像补偿部还包括:点代表值计算部,对于所述输入灰度,计算出作为点单位的代表值的点代表值。
10.可以是,所述残像补偿部还包括:计数器,对于所述点代表值之中属于临界范围内的点代表值的数量进行计数,从而提供计数值。
11.可以是,所述残像补偿部还包括:静止图像检测部,基于对于多个帧的输入灰度来判断所述多个帧是否相当于所述静止图像,在所述多个帧相当于所述静止图像的情况下生成静止图像检测信号。
12.可以是,所述残像补偿部还包括:选择部,在接收到所述静止图像检测信号的情况下将所述权重值适用于所述输入灰度来生成所述输出灰度,在未接收到所述静止图像检测信号的情况下将所述输出灰度生成为与所述输入灰度相同。
13.可以是,所述残像补偿部还包括:线代表值计算部,对于所述点代表值计算出作为像素行单位的代表值的线代表值。
14.可以是,所述残像补偿部还包括:存储器,输出先前帧的所述线代表值并且存储当前帧的所述线代表值。
15.可以是,所述残像补偿部还包括:权重值计算部,在所述计数值大于临界值时,基于所述当前帧的所述线代表值和所述先前帧的所述线代表值的差异,决定所述第一组的输入灰度、所述第一权重值、所述第二组的输入灰度和所述第二权重值。
16.可以是,所述权重值计算部在所述计数值小于所述临界值时,将所述第一权重值和所述第二权重值决定为1。
17.可以是,所述残像补偿部还包括:权重值计算部,在所述计数值大于临界值时,基于所述当前帧的所述线代表值和所述先前帧的所述线代表值的差异以及所述点代表值,决定所述第一组的输入灰度、所述第一权重值、所述第二组的输入灰度和所述第二权重值。
18.可以是,所述残像补偿部还包括:权重值计算部,在所述计数值大于临界值时,基于所述点代表值和所述先前帧的所述线代表值的差异,决定所述第一组的输入灰度、所述第一权重值、所述第二组的输入灰度和所述第二权重值。
19.可以是,所述残像补偿部还包括:帧代表值计算部,对于所述点代表值计算出作为帧单位的代表值的帧代表值。
20.可以是,所述残像补偿部还包括:存储器,输出先前帧的所述帧代表值并且存储当前帧的所述帧代表值。
21.可以是,所述残像补偿部还包括:权重值计算部,在所述计数值大于临界值时,基于所述当前帧的所述帧代表值和所述先前帧的所述帧代表值的差异以及所述点代表值,决定所述第一组的输入灰度、所述第一权重值、所述第二组的输入灰度和所述第二权重值。
22.可以是,所述残像补偿部还包括:权重值计算部,在所述计数值大于临界值时,基于所述点代表值和所述先前帧的所述帧代表值的差异,决定所述第一组的输入灰度、所述第一权重值、所述第二组的输入灰度和所述第二权重值。
23.本发明的一实施例涉及的显示装置的驱动方法可以包括:在输入灰度对应于静止图像的情况下,生成静止图像检测信号的步骤;在生成所述静止图像检测信号的情况下,将权重值适用于所述输入灰度来生成输出灰度的步骤;以及基于所述输出灰度来显示图像的步骤,可以在生成所述输出灰度的步骤中,对于第一组的输入灰度适用初始值大于1的第一权重值,随着时间的流逝,使所述第一权重值收敛于1,并且可以在生成所述输出灰度的步骤中,对于第二组的输入灰度适用初始值小于1的第二权重值,随着时间的流逝,使所述第二权重值收敛于1。
24.可以是,所述第一组的输入灰度的代表值小于先前帧的对应的代表值,所述第二组的输入灰度的代表值大于所述先前帧的对应的代表值。
25.(发明效果)
26.本发明涉及的显示装置及其驱动方法可以以最小限度使用存储器容量的同时解决瞬间残像问题。
附图说明
27.图1是用于说明本发明的一实施例涉及的显示装置的图。
28.图2是用于说明本发明的一实施例涉及的像素部的图。
29.图3是用于说明本发明的一实施例涉及的像素的图。
30.图4是用于说明图3的像素的例示性的驱动方法的图。
31.图5是用于说明瞬间残像问题的图。
32.图6是用于说明本发明的一实施例涉及的残像补偿部的图。
33.图7和图8是用于说明本发明的一实施例涉及的第一权重值的图。
34.图9和图10是用于说明本发明的一实施例涉及的第二权重值的图。
35.图11至图14是用于说明本发明的其他实施例涉及的残像补偿部的图。
具体实施方式
36.以下,参照附图,详细说明本发明的各实施例,使得本领域技术人员能够容易实施。本发明可以以各种不同的形态实现,并不限于在此说明的实施例。
37.为了明确地说明本发明,省略了与说明无关的部分,通过整个说明书,对于相同或类似的构成要素赋予相同的符号。因此,在前说明的符号也可以使用在其他附图中。
38.此外,为了便于说明而任意地示出了图示的各构成的大小和厚度,因此本发明并不一定限于图示的情况。为了明确地表现各层和各区域,可以有所夸张地示出它们的厚度。
39.此外,在说明中,“相同”的表述可以表示“实质上相同”。即,可以是本领域技术人员能够认可为相同的程度的相同。除此以外的表述也可以是“实质上”被省略的表述。
40.图1是用于说明本发明的一实施例涉及的显示装置的图。
41.参照图1,显示装置1可以包括时序控制部11、数据驱动部12、扫描驱动部13、像素部14、发光驱动部15和残像补偿部16。
42.时序控制部11可以从处理器接收对于各个帧的输入灰度和时序信号。在此,处理器可以相当于图形处理单元(gpu,graphics processing unit)、中央处理单元(cpu,central processing unit)、应用处理器(ap,application processor)等中的至少一种。时序信号可以包括垂直同步信号(vertical synchronization signal)、水平同步信号(horizontal synchronization signal)、数据选通信号(data enable signal)等。
43.垂直同步信号的各自的期间(cycle)可以对应于各个帧期间。水平同步信号的各自的期间(cycle)可以对应于各个水平期间(horizontal period)。可以与数据选通信号的选通电平的脉冲对应地,在各水平期间以水平线(horizontal line)为单位供给输入灰度。水平线可以表示与相同的扫描线及发光线连接的像素(例如,像素行)。
44.残像补偿部16可以在输入灰度对应于静止图像的情况下,将权重值适用于输入灰度来生成输出灰度。残像补偿部16可以从时序控制部11接收输入灰度,将生成的输出灰度提供到时序控制部11。残像补偿部16和时序控制部11可以是独立的硬件,也可以是一体的硬件。另一方面,也可以在时序控制部11内以软件形式实现残像补偿部16。
45.时序控制部11可以将输出灰度和数据控制信号提供到数据驱动部12。此外,时序控制部11可以将扫描控制信号提供到扫描驱动部13,并且将发光控制信号提供到发光驱动部15。
46.数据驱动部12可以利用从时序控制部11接收到的输出灰度和数据控制信号,生成将要提供到数据线dl1、dl2、dl3、dl4、...、dln的数据电压(即,数据信号)。数据控制信号可以根据数据驱动部12与时序控制部11间的预先定义的接口而不同。n可以是大于0的整数。
47.扫描驱动部13可以利用从时序控制部11接收到的扫描控制信号(例如,时钟信号、扫描起始信号等),生成将要提供到扫描线sl0、sl1、sl2、...、slm的扫描信号。扫描驱动部13可以将具有导通电平的脉冲的扫描信号依次供给到扫描线sl0至slm。扫描驱动部13可以包括构成为移位寄存器(shift register)形态的扫描驱动级。扫描驱动部13可以根据时钟信号的控制,通过将作为导通电平的脉冲形态的扫描起始信号依次传递到下一扫描驱动级的方式生成扫描信号。m可以是大于0的整数。
48.发光驱动部15可以利用从时序控制部11接收到的发光控制信号(例如,时钟信号、发光中止信号等),生成将要提供到发光线el1、el2、el3、...、elo的发光信号。发光驱动部15可以将具有截止电平的脉冲的发光信号依次供给到发光线el1至elo。发光驱动部15可以包括构成为移位寄存器形态的发光驱动级。发光驱动部15可以根据时钟信号的控制,通过将作为截止电平的脉冲形态的发光中止信号依次传递到下一发光驱动级的方式生成发光信号。o可以是大于0的整数。
49.像素部14包括像素。像素可以基于输出灰度来显示图像。各个像素pxij可以连接到对应的数据线、扫描线和发光线。例如,像素可以包括射出第一颜色的光的像素、射出第二颜色的光的像素以及射出第三颜色的光的像素。第一颜色、第二颜色和第三颜色可以是彼此不同的颜色。例如,第一颜色可以是红色、绿色和蓝色中的一种颜色,第二颜色可以是红色、绿色和蓝色之中不为第一颜色的一种颜色,第三颜色可以是红色、绿色和蓝色之中不为第一颜色和第二颜色的剩余颜色。此外,作为第一颜色至第三颜色,也可以使用品红色(magenta)、青色(cyan)和黄色(yellow)来替代红色、绿色和蓝色。
50.图2是用于说明本发明的一实施例涉及的像素部的图。
51.参照图2,例示性地示出了rgb条纹(rgb stripe)结构的像素部14。
52.各个点dt11、dt12、dt13、dt14、dt21、dt22、dt23、dt24、dt31、dt32、dt33、dt34、dt41、dt42、dt43、dt44可以包括在第一方向dr1上排列的第一颜色的像素、第二颜色的像素和第三颜色的像素。此时,第一颜色、第二颜色和第三颜色可以彼此不同。例如,第一颜色可以是红色,第二颜色可以是绿色,第三颜色可以是蓝色。
53.在此,像素的颜色表示图3的发光元件ld发光时的颜色。此外,像素的位置以发光元件ld的发光面的位置为基准来进行说明。
54.数据线dl1、dl2、dl3、dl4、dl5、dl6、dl7、dl8、dl9、dl10、dl11、dl12可以与单一颜色(single color)的像素连接。例如,数据线dl1、dl4、dl7、dl10可以分别与红色的像素px11、px21、px31、px41、px14、px24、px34、px44、px17、px27、px37、px47、px110、px210、px310、px410连接。此外,数据线dl2、dl5、dl8、dl11可以分别与绿色的像素px12、px22、px32、px42、px15、px25、px35、px45、px18、px28、px38、px48、px111、px211、px311、px411连接。此外,数据线dl3、dl6、dl9、dl12可以分别与蓝色的像素px13、px23、px33、px43、px16、px26、px36、px46、px19、px29、px39、px49、px112、px212、px312、px412连接。
55.像素行可以表示与相同的扫描线及发光线连接的像素。例如,由于包括于点dt11、dt12、dt13、dt14的像素px11至px112与相同的扫描线sl0、sl1及发光线el1连接,因此可以
light emitting diode)、无机发光元件(inorganic light emitting diode)、量子点/阱发光元件(quantum dot/well light emitting diode)等构成。发光元件ld可以以第一颜色、第二颜色和第三颜色之中的任一种颜色发光。此外,在本实施例中,各像素仅具备一个发光元件ld,但是在其他实施例中各像素也可以具备多个发光元件。此时,多个发光元件可以以串联、并联、串并联等方式被连接。
68.可以向第一电源线elvddl施加第一电源电压,向第二电源线elvssl施加第二电源电压,向初始化线intl施加初始化电压。例如,第一电源电压可以大于第二电源电压。例如,初始化电压可以等于或大于第二电源电压。例如,初始化电压可以对应于可提供的数据电压之中最小大小的数据电压。在其他例中,初始化电压的大小可以小于可提供的数据电压的大小。
69.图4是用于说明图3的像素的例示性的驱动方法的图。
70.以下,为了便于说明,假设扫描线sli1、sli2、sli4为第i扫描线sli并且扫描线sli3为第i-1扫描线sl(i-1)的情况。然而,扫描线sli1、sli2、sli3、sli4的连接关系可以根据实施例而具有各种方式。例如,扫描线sli4可以是第i-1扫描线,或者也可以是第i 1扫描线。
71.首先,向第i发光线eli施加截止电平(逻辑高电平(logic high level))的发光信号,向数据线dlj施加对于第i-1像素的数据电压data(i-1)j,向扫描线sli3施加导通电平(逻辑低电平(logic low level))的扫描信号。逻辑电平的高/低可以根据晶体管为p型还是n型而不同。
72.此时,由于向扫描线sli1、sli2施加截止电平的扫描信号,因此第二晶体管t2处于截止状态,防止对于第i-1像素的数据电压data(i-1)j被引入到像素pxij。
73.此时,由于第四晶体管t4处于导通状态,因此第一节点n1与初始化线intl连接,从而使第一节点n1的电压初始化。由于向第i发光线eli施加截止电平的发光信号,因此第五晶体管t5和第六晶体管t6处于截止状态,防止发光元件ld因初始化电压施加过程而不必要的发光。
74.接着,向数据线dlj施加对于第i像素pxij的数据电压dataij,向扫描线sli1、sli2施加导通电平的扫描信号。由此,第二晶体管t2、第一晶体管t1和第三晶体管t3变成导通状态,数据线dlj与第一节点n1被电连接。因此,从数据电压dataij减去第一晶体管t1的阈值电压而得到的补偿电压被施加到储能电容器cst的第二电极(即,第一节点n1),储能电容器cst维持与第一电源电压和补偿电压的差异相当的电压。这种期间可以被命名为阈值电压补偿期间或数据写入期间。
75.此外,在扫描线sli4为第i扫描线sli的情况下,由于第七晶体管t7处于导通状态,因此发光元件ld的阳极与初始化线intl连接,发光元件ld被初始化为与初始化电压和第二电源电压的电压差异相当的电荷量。
76.然后,随着向第i发光线eli施加导通电平的发光信号,第五晶体管t5和第六晶体管t6可以被导通。因此,形成将第一电源线elvddl、第五晶体管t5、第一晶体管t1、第六晶体管t6、发光元件ld和第二电源线elvssl连接的驱动电流路径。
77.根据维持在储能电容器cst中的电压,调节在第一晶体管t1的第一电极和第二电极中流动的驱动电流量。发光元件ld以与驱动电流量对应的亮度发光。发光元件ld发光直
到向第i发光线eli施加截止电平的发光信号为止。
78.在发光信号为导通电平时,接收该发光信号的像素可以处于显示状态。因此,可以将发光信号为导通电平的期间称为发光期间ep(或者,允许发光期间)。此外,在发光信号为截止电平时,接收该发光信号的像素可以处于非显示状态。因此,可以将发光信号为截止电平的期间称为不发光期间nep(或者,不允许发光期间)。
79.图4中说明的不发光期间nep用于防止像素pxij在经历初始化期间和数据写入期间的过程中以不期望的亮度发光的情况。
80.在写入像素pxij的数据被维持的期间(例如,一帧期间),可以进一步提供一次以上的不发光期间nep。这是为了减少像素pxij的发光期间ep,从而有效地表现出低灰度或者对图像的移动(motion)柔和地进行模糊(blur)处理。
81.图5是用于说明瞬间残像问题的图。
82.例如,假设第一像素在时间点t0处于接收与白色灰度(例如,255灰度)对应的数据电压的状态,第二像素在时间点t0处于接收与黑色灰度(例如,0灰度)对应的数据电压的状态。此外,假设第一像素在时间点t1处于接收与中间灰度(例如,48灰度)对应的数据电压的状态,第二像素在时间点t1处于接收与同一中间灰度(例如,48灰度)对应的数据电压的状态。因此,理想的状态是,第一像素以与图表hlg对应的亮度发光且第二像素以与图表lhg对应的亮度发光。
83.然而,由于第一晶体管t1的滞后特性和其他要因,第一像素的发光亮度可能会随着图表hlgr出现下冲(undershoot)而在时间点t2对应于比中间灰度低的灰度。另一方面,第二像素的发光亮度可能会随着图表lhgr出现过冲(overshoot)而在时间点t2对应于比中间灰度高的灰度。第一晶体管t1的滞后特性表示从低灰度上升至高灰度时的电流量与栅-源极电压之比和从高灰度下降至低灰度时的电流量与栅-源极电压之比彼此不同的特性。其他要因可以包括储能电容器cst的急剧的电压变化。因此,使用者可以在期间t1至t3内瞬间识别到残像。
84.若到达时间点t3,则图表lhgr向图表lhg收敛且图表hlgr向图表hlg收敛,从而使用者可能不会识别到残像。可以将期间t1至t3定义为瞬间残像期间。瞬间残像期间的开始时间点t1和结束时间点t2可以根据残像的定义(理想亮度与实际亮度的差异程度)而不同。
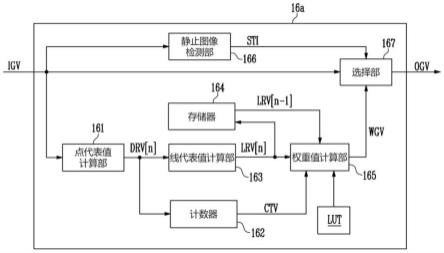
85.图6是用于说明本发明的一实施例涉及的残像补偿部的图。
86.参照图6,本发明的一实施例涉及的残像补偿部16a可以包括点代表值计算部161、计数器162、线代表值计算部163、存储器164、权重值计算部165、静止图像检测部166、选择部167和查找表lut。
87.残像补偿部16a可以在输入灰度igv与静止图像对应的情况下,将权重值wgv适用于输入灰度igv来生成输出灰度ogv。权重值wgv可以包括第一权重值和第二权重值。
88.残像补偿部16a可以将输入灰度igv指定为第一组或第二组,对第一组的输入灰度igv适用第一权重值,对第二组的输入灰度igv适用第二权重值。例如,在输入灰度igv的代表值小于先前帧的对应的代表值的情况下,残像补偿部16a可以将这种输入灰度igv指定为第一组。参照图5,可以根据图表hlgr而预测到第一组的输入灰度的下冲。另一方面,在输入灰度igv的代表值大于先前帧的对应的代表值的情况下,残像补偿部16a可以将这种输入灰度igv指定为第二组。参照图5,可以根据图表lhgr而预测到第二组的输入灰度的过冲。
89.残像补偿部16a可以对第一组的输入灰度igv适用具有大于1的初始值的第一权重值,随着时间的流逝,使第一权重值收敛于1。即,可以通过使输出灰度ogv与输入灰度igv之比增加,从而补偿下冲。另外,残像补偿部16a可以对第二组的输入灰度适用具有小于1的初始值的第二权重值,随着时间的流逝,使第二权重值收敛于1。即,可以通过使输出灰度ogv与输入灰度igv之比减小,从而补偿过冲。
90.查找表lut可以预先记录第一权重值的初始值和第二权重值的初始值。例如,查找表lut可以不记录并非第一权重值和第二权重值的初始值的值,从而减少存储器使用量。例如,查找表lut可以被记录在存储器164中或者被存储在其他存储器中。
91.第一组的输入灰度的代表值与先前帧的对应的代表值的差异越大,第一权重值的初始值可以越大。即,下冲程度越大,可以使残像补偿程度越大。另一方面,第二组的输入灰度的代表值与先前帧的对应的代表值的差异越大,第二权重值的初始值可以越小。即,过冲程度越大,可以使残像补偿程度越大。
92.图6、图11、图12、图13和图14的残像补偿部16a、16b、16c、16d、16e共同地包括上述的残像补偿过程。以下,主要说明未说明的内容和实施例间的差异点。
93.再次参照图6,点代表值计算部161可以对输入灰度igv计算出作为点单位的代表值的点代表值drv[n]。在此,n是指帧编号,第n帧是指当前帧。第n-1帧是指先前帧。如图2中已说明的那样,在rgb条纹结构中,各点可以包括3个像素。可以如以下数学式1那样计算出各个点代表值drv[n]。
[0094]
[数学式1]
[0095]
drv=(rv
×
rc gv
×
gc bv
×
bc)/100
[0096]
在此,drv可以是一个点的点代表值,rv可以是该点的红色灰度值,rc可以是红色权重值,gv可以是该点的绿色灰度值,gc可以是绿色权重值,bv可以是该点的蓝色灰度值,bc可以是蓝色权重值。例如,rv、gv、bv可以是适用了伽马值(例如,2.2)的灰度值。例如,rc gc bc可以是100。例如,可以将rc设定为10、将gc设定为85且将bc设定为5。rc、gc、bc间的比率可以在显示装置1中根据亮度贡献比率而被确定为不同的比率。
[0097]
计数器162可以对点代表值drv[n]之中属于临界范围内的点代表值drv[n]的数量进行计数,从而提供计数值ctv。例如,若整体灰度范围在0灰度以上且255灰度以下,则临界范围可以具有40灰度以上且48灰度以下的范围。临界范围可以根据显示装置1的规格而确定为最能识别到瞬间残像的范围。例如,若构成像素部14的点的数量为1920
×
1080个,则计数值ctv可以具有0至1920
×
1080的范围。
[0098]
静止图像检测部166可以基于对于多个帧的输入灰度igv,判断多个帧是否属于静止图像,在多个帧属于静止图像的情况下生成静止图像检测信号sti。例如,静止图像检测部166可以在多个帧显示相同的图像长达一定时间(例如,10秒)以上的情况下,生成静止图像检测信号sti。一定时间和多个帧相同的程度可以根据显示装置1的规格而不同地确定。由于静止图像检测算法可以使用已公开的技术,因此不进行进一步说明。
[0099]
选择部167可以在接收到静止图像检测信号sti的情况(即,属于静止图像的情况)下将权重值wgv适用于输入灰度igv(例如,相乘)来生成输出灰度ogv,在未接收到静止图像检测信号sti的情况(即,属于动态图像的情况)下将输出灰度ogv生成为与输入灰度igv相同。
[0100]
线代表值计算部163可以对点代表值drv[n]计算出作为像素行单位的代表值的线代表值lrv[n]。如前所述,像素行可以表示与相同的扫描线及相同的发光线连接的像素(或者,点)。例如,线代表值lrv[n]可以包括该像素行的点代表值drv[n]的平均值、最大值和最小值中的至少一个。假设后述的线代表值lrv[n]为点代表值drv[n]的平均值的情况来进行说明。
[0101]
存储器164可以输出先前帧的线代表值lrv[n-1],存储当前帧的线代表值lrv[n]。由于存储器164无需存储先前帧或当前帧的点代表值drv[n],因此可以减少存储器构成费用。
[0102]
权重值计算部165可以在计数值ctv小于临界值时将第一权重值和第二权重值决定为1。因此,输入灰度igv和输出灰度ogv可以相同。
[0103]
权重值计算部165可以在计数值ctv大于临界值时,基于当前帧的线代表值lrv[n]与先前帧的线代表值lrv[n-1]的差异,决定第一组的输入灰度、第一权重值、第二组的输入灰度和第二权重值。例如,若构成像素部14的点的数量为1920
×
1080个且以85%为基准设定临界值,则临界值可以被确定为1920
×
1080
×
0.85=1762560。临界值可以根据显示装置1的规格而以各种方式设定。
[0104]
权重值计算部165可以将输入灰度igv指定为第一组或第二组,对于第一组的输入灰度igv适用第一权重值,对于第二组的输入灰度igv适用第二权重值。例如,权重值计算部165可以在线代表值lrv[n]小于先前帧的对应的线代表值lrv[n-1]的情况下,将与线代表值lrv[n]对应的(即,相应像素行的)输入灰度igv指定为第一组。参照图5,根据图表hlgr,预测到第一组的输入灰度的下冲。另一方面,权重值计算部165可以在线代表值lrv[n]大于先前帧的对应的线代表值lrv[n-1]的情况下,将与线代表值lrv[n]对应的(即,相应像素行的)输入灰度igv指定为第二组。参照图5,根据图表lhgr,预测到第二组的输入灰度的过冲。
[0105]
权重值计算部165可以对于第一组的输入灰度igv适用具有大于1的初始值的第一权重值,随着时间的流逝,使第一权重值收敛于1。即,可以通过增加输出灰度ogv与输入灰度igv之比来补偿下冲。另一方面,权重值计算部165可以对于第二组的输入灰度适用具有小于1的初始值的第二权重值,随着时间的流逝,使第二权重值收敛于1。即,可以通过减小输出灰度ogv与输入灰度igv之比来补偿过冲。如前所述,第一权重值和第二权重值的初始值可以预先被记录在查找表lut中。
[0106]
图7和图8是用于说明本发明的一实施例涉及的第一权重值的图。
[0107]
参照图7和图8,第一组的输入灰度igv的代表值(例如,线代表值lrv[n])与先前帧的对应的代表值(例如,线代表值lrv[n-1])的差异越大,第一权重值的初始值pwgv1、pwgv2、pwgv3、pwgv4可以越大。即,预测到的下冲程度越大,可以使残像补偿程度越大。
[0108]
在一实施例中,权重值计算部165可以在线代表值lrv[n]之中的最大值与平均值的差异大的情况下,或者在线代表值lrv[n]之中的最小值与平均值的差异大的情况下,使残像补偿程度小。这是因为,在点代表值drv[n]的偏差大的情况下,残像补偿的偏差也变大,因此可能会发挥出不适当的亮度。
[0109]
如前所述,查找表lut不记录并非第一权重值的初始值的值,从而可以减少存储器使用量。因此,权重值计算部165可以随着时间的流逝,使第一权重值收敛于1。即,权重值计算部165可以随着时间的流逝,弱化残像补偿程度。在图7的实施例中,对于所有第一权重值
的初始值pwgv1、pwgv2、pwgv3、pwgv4可以相同地适用减小斜率pslp。减小斜率pslp可以表示每单位时间的权重值wgv的减小量。
[0110]
但是,在图8的实施例中,随着第一权重值的初始值pwgv1、pwgv2、pwgv3、pwgv4越小,可以设定越大的减小斜率pslp。例如,对于最大的初始值pwgv1,减小斜率pslp可以被设定为最小,对于最小的初始值pwgv4,减小斜率pslp可以被设定为最大。这是因为,与前者相比,后者的亮度变化更不容易被使用者识别到。由此,可以快速地恢复因残像补偿起到的不准确的亮度。
[0111]
图9和图10是用于说明本发明的一实施例涉及的第二权重值的图。
[0112]
参照图9和图10,第二组的输入灰度igv的代表值(例如,线代表值lrv[n])与先前帧的对应的代表值(例如,线代表值lrv[n-1])的差异越大,第二权重值的初始值nwgv1、nwgv2、nwgv3、nwgv4可以越小。即,预测到的过冲程度越大,可以使残像补偿程度越大。
[0113]
在一实施例中,权重值计算部165可以在线代表值lrv[n]之中的最大值与平均值的差异大的情况下,或者在线代表值lrv[n]之中的最小值与平均值的差异大的情况下,使残像补偿程度小。这是因为,在点代表值drv[n]的偏差大的情况下,残像补偿的偏差也变大,因此可能会发挥出不适当的亮度。
[0114]
如前所述,查找表lut不记录并非第二权重值的初始值的值,从而可以减少存储器使用量。因此,权重值计算部165可以随着时间的流逝,使第二权重值收敛于1。即,权重值计算部165可以随着时间的流逝,弱化残像补偿程度。在图9的实施例中,对于所有第二权重值的初始值nwgv1、nwgv2、nwgv3、nwgv4可以相同地适用增加斜率nslp。增加斜率nslp可以表示每单位时间的权重值wgv的增加量。
[0115]
但是,在图10的实施例中,随着第二权重值的初始值nwgv1、nwgv2、nwgv3、nwgv4越大,可以设定越大的增加斜率nslp。例如,对于最大的初始值nwgv4,增加斜率nslp可以被设定为最大,对于最小的初始值nwgv1,增加斜率nslp可以被设定为最小。这是因为,与前者相比,后者的亮度变化更不容易被使用者识别到。由此,可以快速地恢复因残像补偿引起的不准确的亮度。
[0116]
图11至图14是用于说明本发明的其他实施例涉及的残像补偿部的图。
[0117]
图11的残像补偿部16b与残像补偿部16a的差异在于权重值计算部165还接收点代表值drv[n]。以下,主要说明残像补偿部16b和残像补偿部16a的差异点,省略对于残像补偿部16b和残像补偿部16a的共同的内容的说明。
[0118]
权重值计算部165可以在计数值ctv大于临界值时,基于当前帧的线代表值lrv[n]与先前帧的线代表值lrv[n-1]的差异和点代表值drv[n],决定第一组的输入灰度、第一权重值、第二组的输入灰度和第二权重值。
[0119]
例如,权重值计算部165可以比较点代表值drv[n]和先前帧的线代表值lrv[n-1],从而将输入灰度igv指定为第一组或第二组。例如,权重值计算部165可以将与比先前帧的线代表值lrv[n-1]小的点代表值drv[n]对应的输入灰度igv指定为第一组。另一方面,权重值计算部165可以将与比先前帧的线代表值lrv[n-1]大的点代表值drv[n]对应的输入灰度igv指定为第二组。
[0120]
例如,权重值计算部165可以基于当前帧的线代表值lrv[n]和先前帧的线代表值lrv[n-1]的差异,决定权重值wgv的初始值的大小。此时,在各像素行中决定的权重值wgv的
大小可以共同适用于第一组和第二组。
[0121]
因此,与残像补偿部16a相比,本实施例的残像补偿部16b可以在没有附加存储器费用的情况下更准确地指定第一组和第二组,从而残像补偿的准确度上升。
[0122]
图12的残像补偿部16c与残像补偿部16b的差异在于,权重值计算部165不接收当前帧的线代表值lrv[n]。以下,主要说明残像补偿部16c和残像补偿部16b的差异点,省略对于残像补偿部16c和残像补偿部16b的共同的内容的说明。
[0123]
权重值计算部165可以在计数值ctv大于临界值时,基于点代表值drv[n]与先前帧的线代表值lrv[n-1]的差异,决定第一组的输入灰度、第一权重值、第二组的输入灰度和第二权重值。
[0124]
例如,权重值计算部165可以比较点代表值drv[n]和先前帧的线代表值lrv[n-1],从而将输入灰度igv指定为第一组或第二组。此外,权重值计算部165可以基于点代表值drv[n]和先前帧的线代表值lrv[n-1]的差异,决定权重值wgv的初始值的大小。
[0125]
根据本实施例,与残像补偿部16b相比,残像补偿部16c可以在没有附加存储器费用的情况下更准确地指定权重值wgv的初始值的大小,从而残像补偿的准确度上升。然而,与残像补偿部16b相比,残像补偿部16c的运算费用可能会增加。
[0126]
参照图13,残像补偿部16d不包括线代表值计算部163,而是包括帧代表值计算部168。
[0127]
帧代表值计算部168可以对于点代表值drv[n]计算出作为帧单位的代表值的帧代表值frv[n]。例如,帧代表值frv[n]可以包括相应帧的点代表值drv[n]的平均值、最大值和最小值中的至少一个。假设后述的帧代表值frv[n]为点代表值drv[n]的平均值的情况来进行说明。
[0128]
存储器164可以输出先前帧的帧代表值frv[n-1],存储当前帧的帧代表值frv[n]。根据本实施例,由于帧代表值frv[n]的大小小于线代表值lrv[n]的大小,因此与残像补偿部16a、16b、16c相比,可以减少存储器构成费用。
[0129]
权重值计算部165可以在计数值ctv大于临界值时,基于当前帧的帧代表值frv[n]与先前帧的帧代表值frv[n-1]的差异和点代表值drv[n],决定第一组的输入灰度、第一权重值、第二组的输入灰度和第二权重值。
[0130]
例如,权重值计算部165可以比较点代表值drv[n]与先前帧的帧代表值frv[n-1],从而将输入灰度igv指定为第一组或第二组。例如,权重值计算部165可以将与比先前帧的帧代表值frv[n-1]小的点代表值drv[n]对应的输入灰度igv指定为第一组。另一方面,权重值计算部165可以将与比先前帧的帧代表值frv[n-1]大的点代表值drv[n]对应的输入灰度igv指定为第二组。
[0131]
例如,权重值计算部165可以基于当前帧的帧代表值frv[n]和先前帧的帧代表值frv[n-1]的差异,决定权重值wgv的初始值的大小。此时,在各像素行中决定的权重值wgv的大小可以共同适用于第一组和第二组。
[0132]
因此,与残像补偿部16a、16b、16c相比,本实施例的残像补偿部16d可以减少存储器费用,可以更准确地指定第一组和第二组,从而残像补偿的准确度上升。
[0133]
图14的残像补偿部16e与残像补偿部16d的差异在于,权重值计算部165不接收当前帧的帧代表值frv[n]。以下,主要说明残像补偿部16e和残像补偿部16d的差异点,省略对
于残像补偿部16e和残像补偿部16d的共同的内容的说明。
[0134]
权重值计算部165可以在计数值ctv大于临界值时,基于点代表值drv[n]和先前帧的帧代表值frv[n-1]的差异,决定第一组的输入灰度、第一权重值、第二组的输入灰度和第二权重值。
[0135]
例如,权重值计算部165可以比较点代表值drv[n]和先前帧的帧代表值frv[n-1],从而将输入灰度igv指定为第一组或第二组。此外,权重值计算部165可以基于点代表值drv[n]和先前帧的帧代表值frv[n-1]的差异,决定权重值wgv的初始值的大小。
[0136]
根据本实施例,与残像补偿部16d相比,残像补偿部16e可以在没有附加存储器费用的情况下更准确地指定权重值wgv的初始值的大小,从而残像补偿的准确度上升。然而,与残像补偿部16d相比,残像补偿部16e的运算费用可能会增加。
[0137]
到此为止参照的附图和所记载的发明的详细说明仅仅是本发明的例示,仅仅是为了说明本发明而使用了这些附图和说明,并非为了意思的限定或限制权利要求书所记载的本发明的范围而使用这些附图和说明。因此,本领域技术人员应当能够理解由此可以实现各种变形以及等同的其他实施例。因此,应通过权利要求书的技术思想来确定本发明的真正的技术保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。