技术特征:
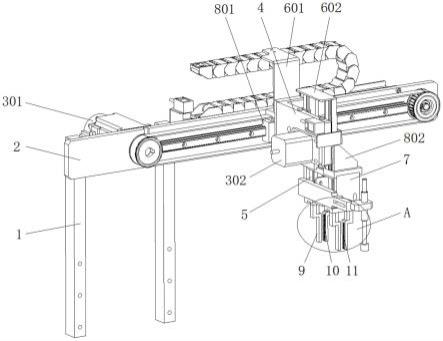
1.一种用于杆状注胶产品的抓取机械手,包括机架(1)、平移轨道(2)、升降轨道(5)、工作头(7)和抓取手(9),其特征在于,所述机架(1)上安装固定有平移轨道(2),平移轨道(2)的一侧设置有平移驱动电机(301),并且平移轨道(2)内滑动配合有平移块(801),所述平移块(801)的上部设置有第一平台(601),平移块(801)的一侧设置有连接支架(4),连接支架(4)的一侧对称设置有升降轨道(5),连接支架(4)的另一侧设置有升降驱动电机(302),并且升降轨道(5)之间滑动配合升降块(802),升降块(802)的一侧通过有第二平台(602)设置有工作头(7),所述工作头(7)的下部对称设置有两组抓取手(9)。2.根据权利要求1所述的一种用于杆状注胶产品的抓取机械手,其特征在于,两组所述抓取手(9)之间的距离为5cm-20cm。3.根据权利要求1所述的一种用于杆状注胶产品的抓取机械手,其特征在于,所述抓取手(9)包括两个抓取指,抓取指相对的一侧开设有凹槽(10),凹槽(10)内嵌合设置有防滑条(11),并且防滑条(11)的材质为橡胶。4.根据权利要求1所述的一种用于杆状注胶产品的抓取机械手,其特征在于,所述平移驱动电机(301)驱动平移块(801)沿平移轨道(2)进行水平移动,升降驱动电机(302)驱动升降块(802)沿升降轨道(5)进行升降移动。5.根据权利要求1所述的一种用于杆状注胶产品的抓取机械手,其特征在于,所述工作头(7)下部设置的每组抓取手(9)上设置有至少两根抓取指,工作头(7)驱使每组抓取手(9)上对应的两根抓取指进行靠近或远离移动动作。
技术总结
本实用新型涉及抓取机械手技术领域,尤其涉及一种用于杆状注胶产品的抓取机械手,包括机架、平移轨道、升降轨道、工作头和抓取手,所述机架上的平移轨道设有平移驱动电机及平移块,平移块的上部设有第一平台,平移块的一侧通过连接支架设有升降轨道,连接支架另一侧设有升降驱动电机,升降轨道之间滑动配合的升降块一侧通过第二平台设有工作头及两组抓取手。本实用新型中,在工作头上设置至少两组抓取手可通过平移轨道及升降轨道进行水平方向或垂直方向的移动,每组抓取手均设有至少两根抓取指,抓取指相对一侧开设的凹槽内嵌合有橡胶材质的防滑条,不仅提高与杆状注胶产品之间的摩擦系数,还减少抓取手对其造成刮伤或磨损,提高了工作效率。高了工作效率。高了工作效率。
技术研发人员:陈留春 陆文杰 杨玉松
受保护的技术使用者:扬州普斯洛自动化科技有限公司
技术研发日:2022.10.26
技术公布日:2023/2/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。