1.本技术涉及自动分拣设备的领域,尤其是涉及一种自动分拣装置。
背景技术:
2.物料在包装完成后,需要利用自动分拣装置将其从传送带转移至推车上,以便后续将其运走。
3.现有的自动分拣装置的安装过程通常包括吊装、固定等步骤,安装过程较为复杂,安装完成后若需要将其转移,则较为麻烦。
技术实现要素:
4.为了使自动分拣装置便于转移,本技术提供一种自动分拣装置。
5.本技术提供的一种自动分拣装置采用如下的技术方案:
6.一种自动分拣装置,包括底座和多个固定件,所述底座连接有万向轮,所述万向轮用于供所述底座的安装平台抵接;所述固定件用于将所述底座与所述安装平台连接,多个所述固定件沿所述底座的周向间隔排布设置;所述固定件具有第一连接部和第二连接部,所述第一连接部与所述底座活动连接,所述第二连接部与所述底座可拆卸连接,所述第二连接部与所述安装平台可拆卸连接。
7.通过采用上述技术方案,安装自动分拣装置时,利用固定件的第一连接部和第二连接部将底座连接于安装平台,即通过底座将自动分拣装置安装于安装平台;转移自动分拣装置时,首先将第二连接部与地面分离,然后将第二连接部连接于底座,之后利用万向轮将自动分拣装置移动至新的安装位置并完成安装即可,相较于现有的利用吊装转移自动分拣装置的方法,更加方便快捷。
8.可选的,所述固定件与所述底座转动连接,所述固定件相对于所述底座转动的轴线与所述底座的高度方向相互垂直。
9.通过采用上述技术方案,将第二连接部与地面分离后,只需将固定件相对于底座转动后连接于底座即可,操作简单快捷。
10.可选的,所述底座的表面开设有容纳槽,所述容纳槽用于容纳所述固定件,所述容纳槽的槽壁用于供所述固定件抵接。
11.通过采用上述技术方案,增加固定件与底座之间的接触面积,降低在自动分拣装置工作的过程中固定件连接于底座的位置处因承受过大的压强和发生损坏的可能。
12.可选的,还包括连接件、第一机械臂、第二机械臂和抓持件,所述连接件转动连接于所述底座,所述连接件相对于所述底座转动的轴线沿所述底座的高度方向;所述第一机械臂铰接于所述连接件,所述第二机械臂铰接于所述第一机械臂;所述抓持件连接于所述第二机械臂,所述抓持件用于抓取物品。
13.通过采用上述技术方案,利用转动连接于底座的连接件、铰接于连接件的第一机械臂和铰接于第一机械臂的第二机械臂配合连接件实现抓持件的三维运动,结构简单、便
于安装。
14.可选的,还包括驱动件,所述驱动件用于驱动所述连接件、所述第一机械臂、所述第二机械臂和所述抓持件运动,所述驱动件位于所述连接件内部,所述连接件的侧壁设置有吸音棉。
15.通过采用上述技术方案,在安装有驱动件的连接件侧壁设置吸音棉,减少自动分拣装置工作时产生的噪音对工作人员的影响。
16.可选的,还包括抓持件,所述抓持件包括第一抓手、第二抓手、第三连接部和驱动部,所述第一抓手与所述第二抓手相对设置,所述第一抓手具有第一抵接部和第二抵接部,所述第二抓手具有第三抵接部和第四抵接部;所述第一抵接部和所述第三抵接部均用于供物品相互背离的侧面抵接,所述第一抵接部和所述第三抵接部均安装有第一压力传感器,所述第二抵接部和所述的第四抵接部均用于供所述物品朝下的表面抵接;所述第一抓手和所述第二抓手均滑移连接于所述第三连接部,所述第一抓手和所述第二抓手均连接于所述驱动部,所述驱动部用于驱动所述第一抓手和所述第二抓手相向和相离运动。
17.通过采用上述技术方案,抓取物品时,利用驱动部使第一抓手和第二抓手相互靠近,利用第一压力传感器检测第一抵接部和第二抵接部所受到的压力,以判断第一抵接部及第二抵接部是否与物品抵接;当第一抵接部和第二抵接部均抵接于物品时,抓取物品;由于第一抓手和第二抓手均滑移连接于第三连接部,因而抓持件可适应于多种尺寸的物品。
18.可选的,所述驱动部包括第一液压杆和第二液压杆,所述第一液压杆用于驱动所述第一抓手向靠近所述第二抓手的方向运动,所述第二液压杆用于驱动所述第二抓手向靠近所述第一抓手的方向运动;所述第一抓手和所述第二抓手之间设置有弹簧,所述弹簧的两端分别连接于所述第一抓手和所述第二抓手。
19.通过采用上述技术方案,利用第一液压杆和第二液压杆分别控制第一抓手和第二抓手,且在第一抓手和第二抓手之间设置弹簧,在第一抓手和第二抓手相对运动时利用弹簧辅助第一抓手和第二抓手复位,同时对第一抓手和第二抓手形成缓冲,从而加强抓取件抓取物品时的稳定性。
20.可选的,所述第二抵接部和所述第四抵接部均安装有第二压力传感器。
21.通过采用上述技术方案,利用第二压力传感器检测第二抵接部和第四抵接部检测所夹持的物品的重力,将质量不符合的物品移送至指定地点码放。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.1.通过在底座设置万向轮和固定件,以便于改变自动分拣装置的安装位置;
24.2.通过使第一抓手和第二抓手滑移连接于第三连接部,使抓持件适应于多种尺寸的物品;
25.3.通过在第二抵接部和第四抵接部设置第二压力传感器,将质量不符的物品移送至指定地点。
附图说明
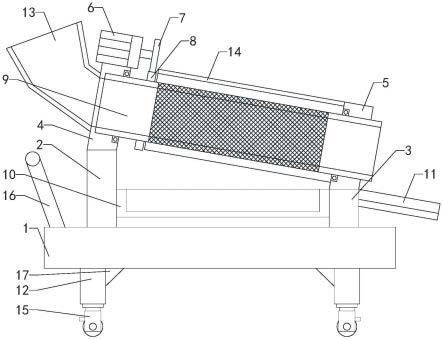
26.图1是本技术实施例的整体结构示意图。
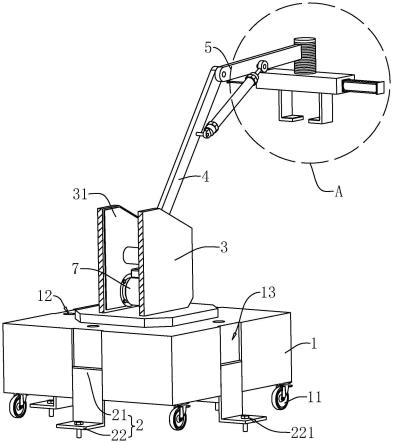
27.图2是图1在a部的放大示意图。
28.图3是用于展示抓持件的结构示意图。
29.附图标记说明:1、底座;11、万向轮;12、第二螺纹孔;13、容纳槽;2、固定件;21、第一连接部;22、第二连接部;221、第一螺纹孔;3、连接件;31、吸音棉;4、第一机械臂;5、第二机械臂;6、抓持件;61、第一抓手;611、第一滑移部;612、第一抵接部;6121、第一压力传感器;613、第二抵接部;6131、第二压力传感器;62、第二抓手;621、第二滑移部;622、第三抵接部;623、第四抵接部;63、第三连接部;631、滑移腔;632、滑移槽;633、弹簧;64、驱动部;641、第一液压杆;642、第二液压杆;7、驱动件。
具体实施方式
30.以下结合附图1-3对本技术作进一步详细说明。
31.本技术实施例公开一种自动分拣装置。参照图1,一种自动分拣装置包括底座1、多个固定件2、连接件3、第一机械臂4、第二机械臂5、抓持件6和驱动件7,底座1安装于地面,底座1面向地面的表面安装有万向轮11,万向轮11用于供地面抵接。
32.参照图1,多个固定件2沿底座1的周向间隔排布设置,固定件2用于将底座1与地面连接。连接件3转动连接于底座1背离地面的表面,连接件3相对于底座1转动的轴线沿底座1的高度方向,连接件3的侧壁粘接固定有吸音棉31。第一机械臂4的一端铰接于连接件3,另一端与第二机械臂5的一端铰接,第二机械臂5远离第一机械臂4的一端与抓持件6连接。驱动件7安装于连接件3的内部,驱动件7为伺服电机,驱动件7用于驱动连接件3、第一机械臂4和第二机械臂5运动。
33.参照图1,固定件2具有第一连接部21和第二连接部22,第一连接部21与底座1的侧壁转动连接,第一连接部21相对于底座1侧壁转动的轴线与底座1的高度方向垂直。第二连接部22的表面用于供地面抵接,第二连接部22的表面贯穿开设有用于供螺钉配合的第一螺纹孔221,以实现第二连接部22与地面的可拆卸连接。
34.参照图1,底座1背离地面的表面开设有用于供螺钉配合的第二螺纹孔12,当第二连接部22与底座1背离地面的表面相对时,第一螺纹孔221和第二螺纹孔12对应,以实现第二连接部22与底座1的可拆卸连接。
35.参照图1,底座1的侧壁开设有容纳槽13,容纳槽13用于容纳固定件2,容纳槽13的槽壁用于供固定件2抵接。
36.参照图1,抓持件6包括第一抓手61、第二抓手62、第三连接部63和驱动部64,第一抓手61和第二抓手62相对设置,第一抓手61和第二抓手62均滑移连接于第三连接部63,驱动部64用于驱动第一抓手61和第二抓手62相向或相离运动。
37.参照图2和图3,第三连接部63为板状结构,第三连接部63的内部开设有滑移腔631,第三连接部63的表面开设有滑移槽632,滑移槽632的槽底将滑移腔631的腔壁贯通。
38.参照图2和图3,第一抓手61具有第一滑移部611,第二抓手62具有第二滑移部621,第一滑移部611和第二滑移部621均位于滑移腔631中,第一滑移部611和第二滑移部621均抵接于滑移腔631的腔壁。第一滑移部611和第二滑移部621之间设置有弹簧633,弹簧633的两端分别固定连接于第一滑移部611和第二滑移部621。
39.参照图2和图3,驱动部64包括第一液压杆641和第二液压杆642,第一液压杆641的活动杆和第二液压杆642的活动杆分别螺纹连接于第一滑移部611和第二滑移部621,第一液压杆641的活动杆和第二液压杆642的活动杆均位于滑移腔631内部。借此设计,利用第一
液压杆641和第二液压杆642分别驱动第一滑移部611和第二滑移部621向靠近或远离彼此的方向发生位移,即,利用第一液压杆641和第二液压杆642分别驱动第一抓手61和第二抓手62向靠近或远离彼此的方向发生位移;弹簧633起到缓冲和辅助复位的作用。
40.参照图2和图3,第一抓手61具有第一抵接部612和第二抵接部613,第二抓手62具有第三抵接部622和第四抵接部623。第一抵接部612和第三抵接部622均用于供物品相互背离的表面抵接,第一抵接部612和第三抵接部622均安装有第一压力传感器6121,第一压力传感器6121用于检测第一抵接部612和第三抵接部622供物品抵接的表面的压力信号。
41.参照图2和图3,第二抵接部613和第四抵接部623均用于供物品朝下的表面抵接,第二抵接部613和第四抵接部623均安装有第二压力传感器6131,第二压力传感器6131用于检测第二抵接部613和第四抵接部623与物品抵接的表面的压力信号。
42.本技术实施例一种自动分拣装置的实施原理为:安装自动分拣装置时,将固定件2的第二连接部22连接于底座1,利用万向轮11将自动分拣装置移动至指定安装位置,然后将第二连接部22与底座1分离,使第一连接部21相对于底座1转动,使第二连接部22抵接于底面,最后通过螺钉和第一螺纹孔221将第二连接部22连接于地面,优选膨胀螺钉,可根据自动分拣装置的质量及待分拣物品的质量选择螺钉的型号。
43.自动分拣装置工作时,使第一抓手61和第二抓手62之间的距离达到最大,待抓持件6运动至指定位置,利用第一液压杆641和第二液压杆642使第一抓手61和第二抓手62相向运动,待第一压力传感器6121检测到压力信号时,将物品夹起并运送至指定位置。运送过程中,分析第二传感器检测到的压力信号,即检测物品的质量,若质量大小不在标准质量范围内,则将物品运送至指定的处理残次品的位置。
44.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。